










专利摘要
异面交叉快变轨道固定时间稳定姿态指向跟踪控制方法,本发明涉及异面交叉快变轨道稳定姿态指向跟踪控制方法。本发明为了解决现有技术未考虑航天器的惯量不确定性,依赖于状态初值,无法自由调整收敛时间,以及飞轮在奇异方向产生的补偿力矩需要人为设计的问题。具体是按照以下步骤进行的:步骤一、设追踪星与目标星位于异面交叉轨道上,需要确定期望姿态;步骤二、期望姿态跟踪控制律的设计;步骤三、消除期望姿态跟踪控制律的抖振;步骤四、追踪星与目标星轨道交叉点的期望姿态随追踪星与目标星轨道交叉点间的距离而变化,根据期望姿态跟踪控制律来确定执行机构的配置方案,求解期望姿态控制力矩。本发明应用于卫星控制领域。
权利要求
1.异面交叉快变轨道固定时间稳定姿态指向跟踪控制方法,其特征在于:异面交叉快变轨道固定时间稳定姿态指向跟踪控制方法具体是按照以下步骤进行的:
步骤一、设追踪星与目标星位于异面交叉轨道上,追踪星需要自主探测目标星的位置,需要确定期望姿态;
步骤二、期望姿态跟踪控制律的设计;
步骤三、消除期望姿态跟踪控制律的抖振;
步骤四、追踪星与目标星轨道交叉点的期望姿态随追踪星与目标星轨道交叉点间的距离而变化,根据期望姿态跟踪控制律来确定执行机构的配置方案,求解期望姿态控制力矩。
2.根据权利要求1所述异面交叉快变轨道固定时间稳定姿态指向跟踪控制方法,其特征在于:所述步骤一中设追踪星与目标星位于异面交叉轨道上,追踪星需要自主探测目标的位置,需要确定期望姿态,具体过程为:
期望姿态坐标系各坐标轴单位矢量在惯性系中由下式确定:
k=i×j
其中rt与rc分别为追踪星与目标星在地心惯性坐标系中的位置矢量;
若期望姿态坐标系与质心轨道坐标系相对质心惯性坐标系的余弦转换矩阵分别为Rdi和Roi,则期望姿态坐标系相对于质心轨道坐标系的转换矩阵为
3.根据权利要求2所述异面交叉快变轨道固定时间稳定姿态指向跟踪控制方法,其特征在于:所述步骤二中期望姿态跟踪控制律的设计,具体步骤为:
在期望姿态坐标系各坐标轴单位矢量下对期望姿态角和本体姿态角进行计算:
将期望姿态角和本体姿态角分别记为ad和ab,它们的差为欧拉姿态角误差,记为e,即e=ab-ad,令系统状态为 可写出线性化状态方程
其中I为对应轴主惯量,在姿态跟踪过程中期望姿态角加速度是有界的,将 项当成有界干扰γ,设 γ0为干扰上界, 为欧拉姿态角的一阶导数, 为欧拉姿态角的二阶导数,u为输入力矩, 为本体姿态角的二阶导数;
线性化状态方程
式中,n=2为系统阶数,
并对线性化状态方程
x1和x2是x=Ge中的x,是个矢量
引入不丢失正负号信息的乘方运算符z[q]=|z|qsign(z),z,q∈R;滑模面的形式为:
式中,α1β1是可变的常值系数;
期望姿态跟踪控制律中期望姿态跟踪滑模控制律具有如下形式:
式中,u1为期望力矩,
4.根据权利要求3所述异面交叉快变轨道固定时间稳定姿态指向跟踪控制方法,其特征在于:所述步骤三中消除期望姿态跟踪控制律的抖振,具体步骤为:消除期望姿态跟踪控制律中期望姿态跟踪滑模控制律的抖振,在姿态跟踪滑模控制律中用饱和函数sat(s)代替符号函数sign(s),
其中Δ>0,为边界层;
5.根据权利要求4所述异面交叉快变轨道固定时间稳定姿态指向跟踪控制方法,其特征在于:所述步骤四中追踪星与目标星轨道交叉点的期望姿态随追踪星与目标星轨道交叉点间的距离而变化,根据期望姿态跟踪控制律来确定执行机构的配置方案,求解期望姿态控制力矩,具体步骤为:
选用反作用飞轮和控制力矩陀螺组合配置;
当偏航轴用两个平行放置的单框架控制力矩陀螺控制;整个卫星角动量为零,即在卫星本体角速度为零时,使h1和h2方向相反,框架角为零;当两个陀螺转子角动量大小都为h,框架角分别为δ1和δ2,陀螺群在卫星本体系中总角动量为
h1和h2为二维角动量,有方向有大小,只能输出x、z方向力矩;h1和h2是矢量,h是在某个方向上的h1和h2的标量;
各陀螺框架转动产生的合成陀螺力矩T可表示为:
式中,δ为陀螺框架角, 是陀螺的框架角速度,C(δ)为陀螺群的力矩矩阵, 是H的一阶导数, 是δ1的一阶导数, 是δ2的一阶导数;
控制力矩陀螺产生奇异,会陷入奇异状态,不能有效输出控制力矩,设计合适的操纵律来回避或脱离奇异状态,奇异值度量为:
D=det(CCT) (10)
奇异时D=0,非奇异时D>0,且该值越大表明奇异程度越小,
框架角速度采用鲁棒伪逆操纵律进行计算,具有如下形式:
其中, 为框架角速度,T为指令力矩,只需输出z轴力矩,即[0,Tz]T;α为权系数,可根据D的大小实时调整;E是单位矩阵;C为陀螺群的力矩矩阵;h为陀螺转子角动量大小;
而滚动轴和俯仰轴分别用一个飞轮控制,期望姿态控制力矩工作模式下飞轮作为单纯一阶惯性环节,对
进行分析与控制器设计;式中,ts为一阶惯性系统的时间常数;
采用PD控制器进行设计,从e到飞轮实际输出期望姿态控制力矩uw的传递函数为
式中,kp为比例环节系数,kd为微分环节系数, 为系统的传递函数;
期望姿态控制力矩uw为
说明书
技术领域
本发明涉及异面交叉快变轨道稳定姿态指向跟踪控制方法。
背景技术
1957年,前苏联发射了首颗人造地球卫星,标志着人类对太空的探索历程向前推进了一大步。现如今,航天技术已成为世界上最引人关注的技术之一,它推动着人类科学技术的进步,使人类的活动领域由大气层内扩展到宇宙空间。其中,为科学研究、国民经济和军事服务的各种科学卫星与应用卫星得到很大发展,卫星已应用于生活的各个领域,如气象卫星、遥感卫星、侦察卫星、导航卫星、地球资源卫星等。而丰富的空间资源也引起各国的争夺,就像各国对制海权、制空权的争夺一样,空天战将成为未来战争的一种重要模式。所以,卫星的军事用途显而易见。
激光武器是目前对卫星软打击的最主要手段,星载激光武器由于距离目标较近并且不需要穿透大气层,只需要很小的功率就可使目标卫星致盲。对目标的跟踪瞄准是激光武器的关键技术之一,所以要求天基激光武器载体卫星具有高精度姿态指向控制能力;另外在对目标卫星的观测监视时,也需要观测仪器的观测轴始终精确对准目标卫星,以上都可归结为姿态指向跟踪控制问题。
近几十年来,滑模变结构控制因其对满足匹配条件的参数摄动和外界干扰具有不变性,得到了广泛的关注和研究。而终端滑模控制与普通的滑模控制相比,可以是系统在有限时间内收敛到给定轨迹,具有动态响应速度快、稳态跟踪精度高等特点。
一种基于线性矩阵不等式(LMI)的姿态控制器设计方法。利用非线性H∞控制来处理航天器姿态控制问题,并在ROLSAT-3系统中进行仿真验证,结果误差较小,精度较高。并且由于该方法基于无源性,所以也同样适用于航天器挠性动态影响问题。并未考虑航天器的惯量不确定性。
一种自适应滑模控制律。既保证了系统的鲁棒性,又同时将有界干扰力矩和转动惯量不确定因素的影响考虑进来。由于滑模控制容易滑使系统出现抖振现象,故用双曲正切函数代替符号函数来克服该问题。但不足的是,该算法收敛时间依赖于状态初值,无法自由调整收敛时间,因此具有一定的局限性。
单框架控制力矩陀螺与动量轮组成混合执行机构,可以实现力矩的准确输出。利用奇异值分解,将指令控制力矩按方向分解,奇异方向上的力矩由动量轮来补偿,完成控制力 矩分配后,再分别进行控制力矩陀螺与动量轮的操纵律设计,从而避免奇异问题。但是该方法既需进行在线实时的奇异值分解运算,并且飞轮在奇异方向产生的补偿力矩需要人为设计。
发明内容
本发明的目的为了解决现有技术未考虑航天器的惯量不确定性的问题,依赖于状态初值,无法自由调整收敛时间的问题,以及飞轮在奇异方向产生的补偿力矩需要人为设计的问题,而提出了异面交叉快变轨道固定时间稳定姿态指向跟踪控制方法。
上述的发明目的是通过以下技术方案实现的:
异面交叉快变轨道固定时间稳定姿态指向跟踪控制方法,其特征在于:异面交叉快变轨道固定时间稳定姿态指向跟踪控制方法具体是按照以下步骤进行的:
步骤一、设追踪星与目标星位于异面交叉轨道上,追踪星需要自主探测目标星的位置,需要确定期望姿态;
步骤二、期望姿态跟踪控制律的设计;
步骤三、消除期望姿态跟踪控制律的抖振;
步骤四、追踪星与目标星轨道交叉点的期望姿态随追踪星与目标星轨道交叉点间的距离而变化,根据期望姿态跟踪控制律来确定执行机构的配置方案,求解期望姿态控制力矩。
发明效果
采用本发明的异面交叉快变轨道固定时间稳定姿态指向跟踪控制方法。
(1)本发明结合期望姿态跟踪控制律的设计,考虑了航天器的惯性不确定性的问题,针对较难解决的异面轨道姿态指向问题提出控制算法,具有其实际应用价值。
(2)本发明针对异面快变交叉轨道下星间姿态指向跟踪控制问题,设计了一种改进型非线性终端滑模控制律,该控制律可以实现不依赖系统状态初值,并能自由调整收敛时间;控制机构方面,选取控制力矩陀螺与飞轮的混合执行机构,既远离奇异点,又可以节省空间,减小复杂度,适用于卫星姿态指向控制。
(3)本发明采用控制机构方面,选取控制力矩陀螺与飞轮的混合执行机构,既远离奇异点,又可以节省空间,减小复杂度,适用于卫星姿态指向控制。
由于只有异面轨道交叉点附近一小段满足探测距离要求,这时期望姿态往往变化很快,本发明可以进行快速指向,实现有限时间控制。利用滑模变结构的抗扰动特性设计控制算法,实现高精度姿态跟踪指向。能实现不依赖系统初值调整过渡过程时间,并且可以自由调整过渡时间。给出一套完整的执行机构选取方案,即反作用飞轮与控制力矩陀螺 (CMG)组合作为控制系统执行机构,用两个平行放置的单框架控制力矩陀螺控制偏航轴,用两个飞轮分别控制另外两个轴。只用两只陀螺,节约空间,减小复杂度,适用于小型航天器。不需要对期望姿态欧拉角求二阶导数,消除不必要的精度损失。
附图说明
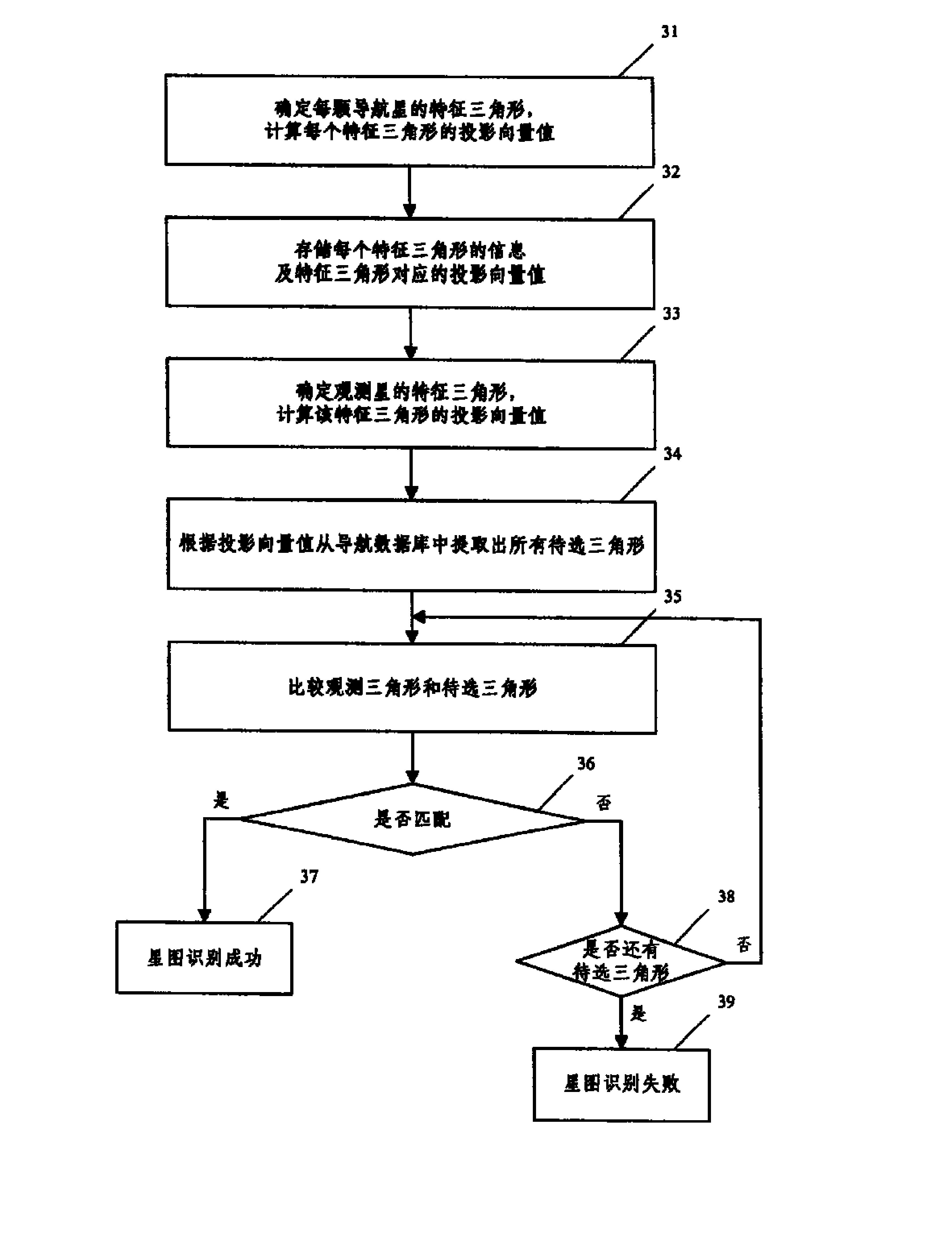
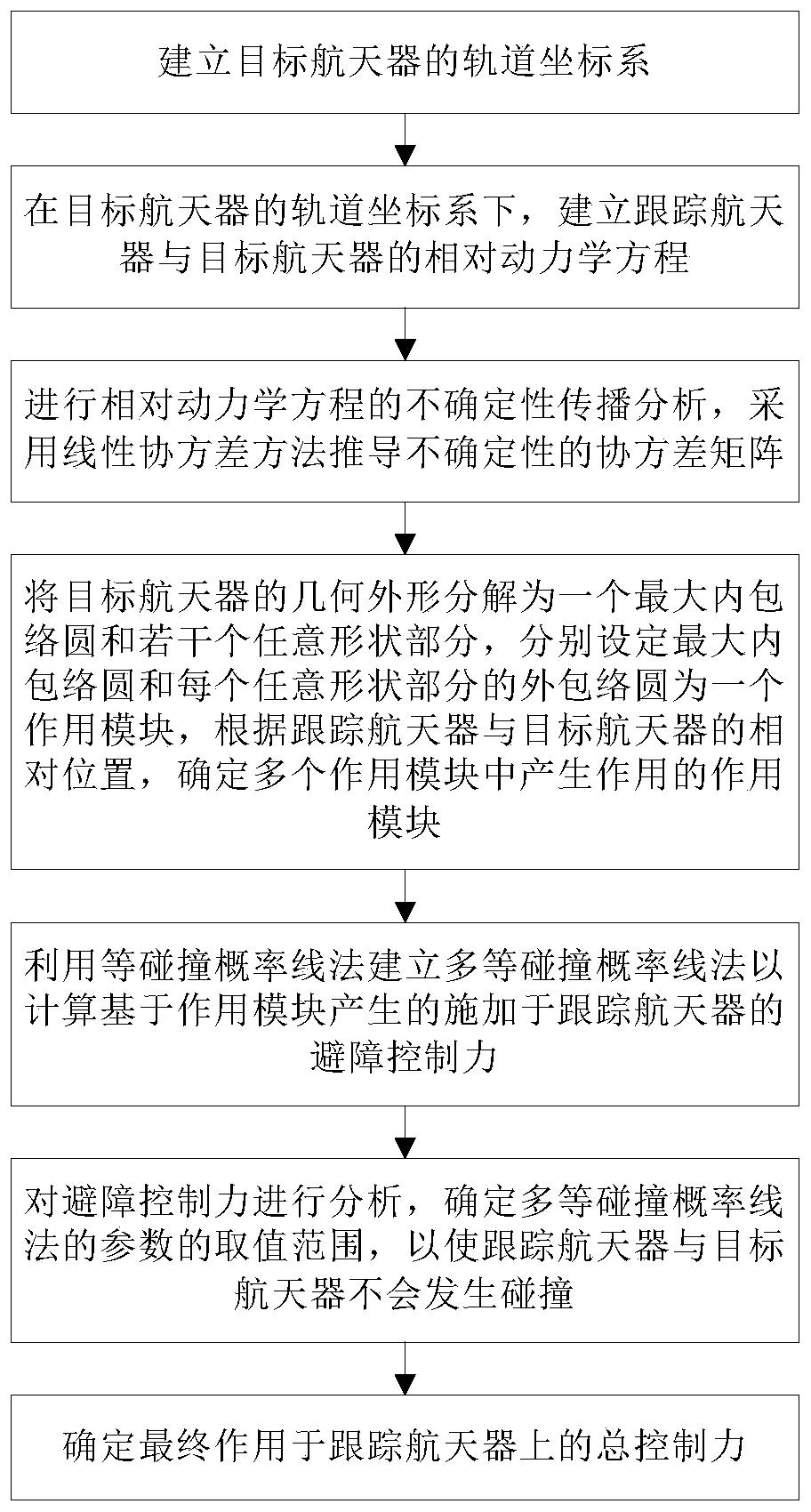
图1是本发明流程示意图;
图2是卫星姿态描述和欧拉角描述法中1-2-3旋转示意图,xb-yb-zb是卫星本体坐标系,xr–yr–zr是卫星的参考坐标系,x′-y′-z′和x″-y″-z″是卫星从参考坐标系到本体坐标系转换过程中的坐标系;
图3是轨道根数中轨道六要素在轨道面中的表示图,i为轨道倾角、Ω为升交点赤经、ω为近心点角距、θ为真近角,x为x坐标轴,y为y坐标轴,z为z坐标轴;
图4是异面快变交叉轨道中期望姿态坐标系,x为x坐标轴,y为y坐标轴,z为z坐标轴;
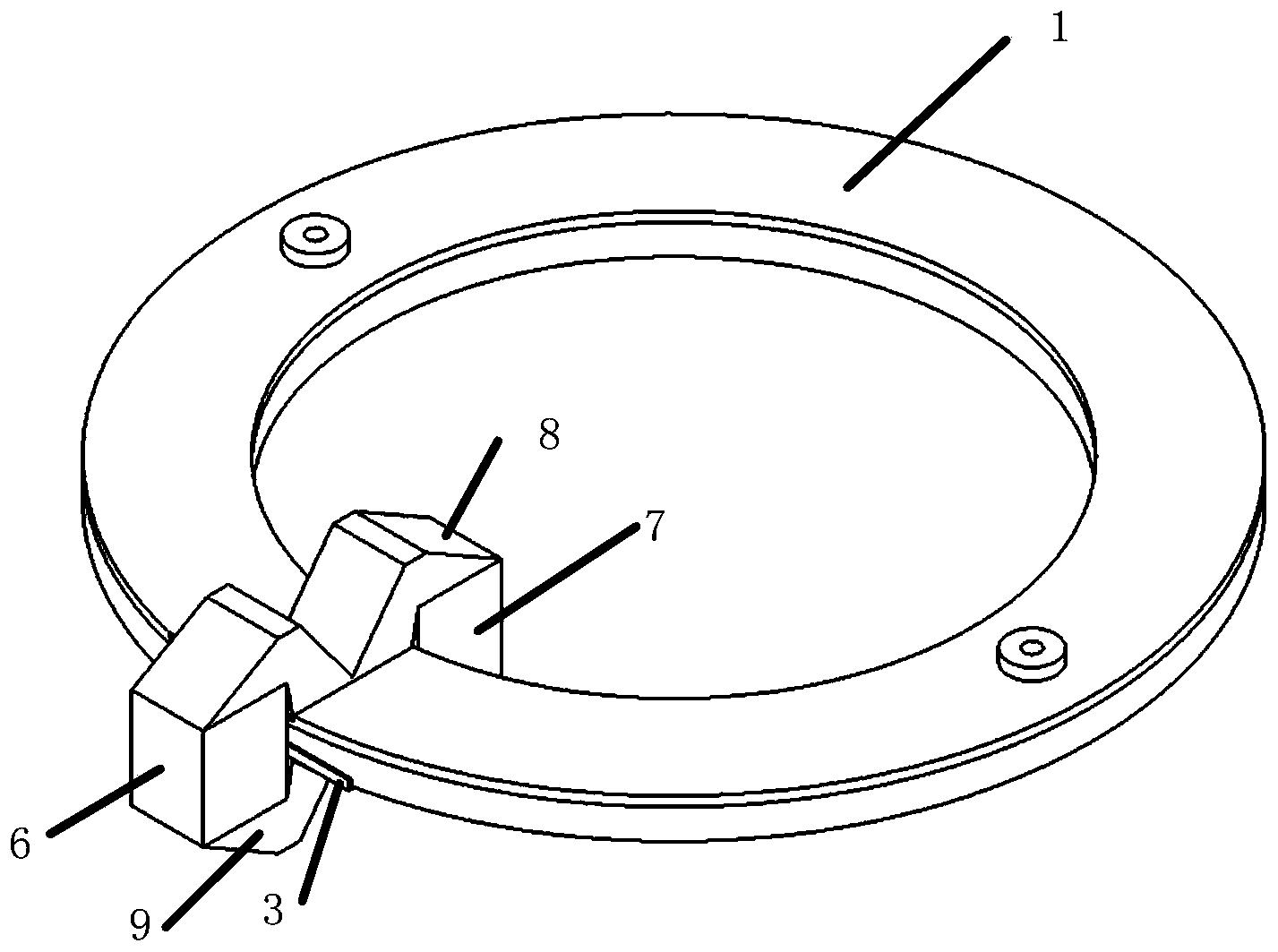
图5是具体实施方式五中控制力矩陀螺群(CMGs)在卫星本体坐标系中的安装构型,h1为,h2为,x为x坐标轴,y为y坐标轴,z为z坐标轴,o为坐标轴中心;
图6是具体实施方式五中力矩模式PD控制器形式图,kp是比例放大系数kd是积分放大系数,ts为惯性时间常数,I为电路电流,ud为干扰力矩, 为期望输入角度, 为实际输出角度, 为期望输入角度,e为角度误差,u*为电机期望输入力矩,s为算子,uw为控制输出力矩;
图7是姿态运动模型的建立中力矩电机的完整动力学模型图,Kv为电压比例系数,BEMF为反电动势,B为电机转子所测量的粘滞阻尼系数(viscosity damping coefficient),ωrel为电机旋转部分相对于航天器(卫星)的角速度,V是电机的输入电压,RM是电机电枢的阻抗,KM为电机的力矩系数,iM为电机转子和飞轮的总转动惯量, 为电机输出力矩,Iw为电机转子和飞轮的总转动惯量,ωW为机正向加速度, 为电机反向输出力矩,ωs为电机反向角速度,Is为航天器(卫星)的转动惯量,s为算子;
图8是姿态运动模型的建立中力矩指令模式下的力矩电机动力学模型图,Tc为初始力矩,KT为饱和比例系数,K为电压积分比例系数,s为算子,VM为电机电压,RM是电机电枢的阻抗,KM为电机的力矩系数,iM为电机转子和飞轮的总转动惯量, 为电机 输出力矩,Iw为电机转子和飞轮的总转动惯量,ωW为电机正向加速度, 为电机反向输出力矩,ωs为电机反向角速度,Is为航天器(卫星)的转动惯量,ωrel为电机旋转部分相对于航天器(卫星)的角速度,B为电机转子所测量的粘滞阻尼系数(viscosity damping coefficient),且阻尼力矩与ωrel成正比,KV为电压比例系数,BEMF为反电动势,current limit为电流限制,Voltage limit为电压限制;
kp是比例放大系数kd是积分放大系数,ts为惯性时间常数,I为电机转子惯量,ud为干扰力矩, 为期望输入角度, 为实际输出角度,e为角度误差u*为电机期望输入力矩,uw为电机控制输出力矩ud为电机干扰力矩 为电机实际输入角度,, 为实际输出角速度,Is为航天器(卫星)的转动惯量;
图9是姿态运动模型的建立中力矩模式PD控制器形式图, 为期望输入角度,e为角度误差,kp为比例放大系数,kd为积分放大系数,u*为电机期望输入力矩,s为算子,ts为惯性时间常数, 为实际输出角速度, 为实际输出角度,Is为航天器(卫星)的转动惯量;
图10是实施例3中姿态角误差变化曲线图;
图11是实施例3中卫星角速度变化曲线图;
图12是实施例3中控制力矩变化曲线图;
图13是实施例3中CMG框架角速度变化曲线图;
图14是实施例3中CMGs奇异值度量变化曲线图。
具体实施方式
具体实施方式一:结合图1说明本实施方式,异面交叉快变轨道固定时间稳定姿态指向跟踪控制方法,其特征在于:异面交叉快变轨道固定时间稳定姿态指向跟踪控制方法具体是按照以下步骤进行的:
步骤一、设追踪星与目标星位于异面交叉轨道上,追踪星需要自主探测目标星的位置,为了让追踪星的激光发射器或观察设备始终指向目标星,首先要确定期望姿态;
步骤二、期望姿态跟踪控制律的设计;
步骤三、消除期望姿态跟踪控制律的抖振;
步骤四、追踪星与目标星轨道交叉点的期望姿态随追踪星与目标星轨道交叉点间的距 离而变化,根据期望姿态跟踪控制律来确定执行机构的配置方案,求解期望姿态控制力矩。
具体实施方式二:本实施方式与具体实施方式一不同的是,其特征在于:所述步骤一中设追踪星与目标星位于异面交叉轨道上,追踪星需要自主探测目标的位置,为了让追踪星的激光发射器或观察设备始终指向目标星,首先要确定期望姿态,具体过程为:
期望姿态坐标系各坐标轴单位矢量在惯性系中由下式确定:
k=i×j
其中rt与rc分别为追踪星与目标星在地心惯性坐标系中的位置矢量;
若期望姿态坐标系与质心轨道坐标系相对质心惯性坐标系的余弦转换矩阵分别为Rdi和Roi,则期望姿态坐标系相对于质心轨道坐标系的转换矩阵为:
其它步骤及参数与具体实施方式一相同。
具体实施方式三:本实施方式与具体实施方式一或二不同的是,其特征在于:所述所述步骤二中期望姿态跟踪控制律的设计,具体步骤为:
在期望姿态坐标系各坐标轴单位矢量下对期望姿态角和本体姿态角进行计算:
将期望姿态角和本体姿态角分别记为ad和ab,它们的差为欧拉姿态角误差,记为e,即e=ab-ad,令系统状态为 可写出线性化状态方程
其中I为对应轴主惯量,在姿态跟踪过程中期望姿态角加速度是有界的,将 项当成有界干扰γ,设 γ0为干扰上界, 为欧拉姿态角的一阶导数, 为欧拉姿态角的二阶导数,u为输入力矩, 为本体姿态角的二阶导数;
线性化状态方程
式中,n=2为系统阶数,
并对线性化状态方程
x1和x2是x=Ge中的x,是个矢量
引入不丢失正负号信息的乘方运算符z[q]=|z|qsign(z),z,q∈R;滑模面的形式为:
式中,α1β1是可变的常值系数;
期望姿态跟踪控制律中期望姿态跟踪滑模控制律具有如下形式:
式中,u1为期望力矩, sign(s)为符号函数;α1、α2、β1和β2都是可变常值系数,是可以任意赋值的变量; 由期望姿态跟踪滑模控制律形式可知需要调节的参数为Tmax和γ0;x在时间Tmax内收敛到原点,即欧拉姿态角误差e在有限时间内收敛到原点。
其它步骤及参数与具体实施方式一或二相同。
具体实施方式四:本实施方式与具体实施方式一、二或三不同的是,其特征在于:所述步骤三中消除期望姿态跟踪控制律的抖振,具体步骤为:消除期望姿态跟踪控制律中期望姿态跟踪滑模控制律的抖振,在姿态跟踪滑模控制律中用饱和函数sat(s)代替符号函数
其中Δ>0,为边界层;
其它步骤及参数与具体实施方式一、二或三相同。
具体实施方式五:本实施方式与具体实施方式一、二、三或四不同的是,其特征在于:所述步骤四中追踪星与目标星轨道交叉点的期望姿态随追踪星与目标星轨道交叉点间的距离而变化,根据期望姿态跟踪控制律来确定执行机构的配置方案,求解期望姿态控制力矩,具体步骤为:
选用反作用飞轮和控制力矩陀螺组合配置,由于两星轨道交叉点附近期望姿态有大幅度变化,故对控制力矩要求较高,因为本文任务中只有偏航轴力矩需求较大,其他两轴力矩需求很小,所以将飞轮和CMG组合使用;
姿态稳定与控制执行机构主要有两种实现形式,一种是基于质量交换原理的喷气推力执行机构,另一种则是以动量交换原理的角动量体执行机构。推力器虽然能提供较大的力矩,但输出力矩不是连续的,不能精确跟踪指令力矩,破坏了控制系统性能。在滑模变结构控制中,对控制量精度要求更高,用推力器作执行机构更容易引起抖振,达不到理想的控制效果。并且,推力器系统所耗费的工质是星体上携带的,工作寿命受携带工质的多少所限,不适于长期运行的航天器。
控制力矩陀螺(Control Momentum Gyroscope,简称CMG)能够输出高精度光滑力矩,控制力矩大,动态响应快,能耗低,寿命长。但由于其通常需要冗余复杂的构型,占用空间较大,所以主要应用于空间站等大型航天器上,在小型卫星上应用的还不多。
由于两星轨道交叉点附近期望姿态有大幅度变化,故对控制力矩要求较高。注意到本文任务中只有偏航轴力矩需求较大,其他两轴力矩需求很小,可以将飞轮和CMG组合使用,即用两个平行放置的单框架控制力矩陀螺控制偏航轴,用两个飞轮分别控制另外两个轴。这样只用两个陀螺极大地节省了空间,也减小了复杂度,适用于本任务中小卫星姿态控制。
控制力矩陀螺群(CMGs)在卫星本体坐标系中的安装构型如图5所示,h1和h2为两个陀螺转子角动量。这种构型只能输出x、z方向力矩,下文中各二维向量代表x和z方向。
当偏航轴用两个平行放置的单框架控制力矩陀螺控制;当整个卫星角动量为零,即在卫星本体角速度为零时,使h1和h2方向相反,框架角为零;用两个平行放置的单框架控制力矩陀螺控制偏航轴,这样只用两个陀螺极大地节省了空间,也减小了复杂度,适用于本任务中小卫星姿态控制;
当偏航轴采用控制力矩陀螺控制时,两个陀螺转子角动量大小都为h,框架角分别为δ1和δ2,陀螺群在卫星本体系中总角动量为
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0