







专利摘要
本发明公开一种用于医疗垃圾自动清理的机器人,包括行走装置、升降装置、悬臂支架、收拢装置、机械臂及扎口装置,升降装置设在行走装置上方,包括安装架、第一滑动座和第二滑动座,两个滑动座一高一低相对设在安装架内,通过丝杠导杆机构与安装架活动相连。收拢装置通过悬臂支架与第一滑动座固定相连,包括安装圆盘、齿轮组件及多个夹持组件,安装圆盘设在悬臂支架的下方。所有夹持组件呈环形均匀设置在安装圆盘下方,齿轮组件可驱动夹持组件运动。扎口装置位于收拢装置下方,包括捆扎盒、储带机构、送带机构、拉带机构及锁紧组件。本发明结构设计巧妙,自动化程度高,替代人工进行医疗垃圾袋收集,省事省力,提高了收集效率。
权利要求
1.一种用于医疗垃圾自动清理的机器人,其特征在于,包括行走装置、升降装置、悬臂支架、收拢装置、机械臂及扎口装置;其中:
行走装置包括底座及行走轮,底座内侧设有电源及电控装置;
升降装置固定安装在行走装置的上方,其包括安装架、第一滑动座和第二滑动座,第一、第二滑动座一高一低相对设置在安装架内,且通过丝杠导杆机构与安装架活动相连;
收拢装置位于安装架的右侧,通过悬臂支架与第一滑动座固定相连,其包括安装圆盘、齿轮组件及多个夹持组件,安装圆盘设置在悬臂支架的下方;
所有夹持组件呈环形均匀布置在安装圆盘的下方,均通过竖向的连杆与安装圆盘活动相连,齿轮组件可驱动夹持组件和安装圆盘转动;
扎口装置位于收拢装置下方,包括捆扎盒以及设在捆扎盒上的储带机构、送带机构、拉带机构及锁紧组件,捆扎盒的左端通过机械臂与第二滑动座活动相连;
悬臂支架的左端与第一滑动座固定相连,安装圆盘通过轴套管与悬臂支架转动配合,所述轴套管的上端连接刹车电机的输出轴固定连接;
所述安装圆盘开设有与夹持组件数量相等且一一对应的第一长圆孔,各第一长圆孔呈环形均匀布置在安装圆盘上,其沿安装圆盘的法线方向延伸;
各第一长圆孔上方分别设有一条导轨,导轨的底部设有与其滑动配合的导滑块,各连杆的上端穿过对应的第一长圆孔与导滑块固定相连,导滑块通过连杆带动对应的夹持组件沿导轨运动;
齿轮组件包括大齿盘、小齿轮及第三伺服电机,所述大齿盘位于安装圆盘的下方,大齿盘的齿盘轴伸至轴套管的内部,且与其同轴转动配合;
小齿轮位于大齿盘的左侧且与其外啮合,小齿轮的齿轮轴与第三伺服电机的输出端固定相连,第三伺服电机安装在悬臂支架顶部;
大齿盘上开设有与第一长圆孔数量相等且一一对应的第二长圆孔,各第二长圆孔的延伸方向与第一长圆孔的延伸方向相对倾斜,各连杆的下端穿过其所在第一长圆孔对应的第二长圆孔,与夹持组件固定相连;
各夹持组件均位于对应导滑块下方,其包括支撑架、第一电动缸及两个夹爪,所述支撑架的顶部与对应连杆的下端固定相连,第一电动缸固定安装在支撑架上;
第一电动缸的活塞杆上设有横撑,横撑的中部与第一电动缸的活塞杆端部固定相连,横撑粘贴有双面胶带;
两个夹爪对称布置在支撑架的下端两侧,夹爪的上端与支撑架转动相连,中部通过推拉杆与横撑对应端转动相连,第一电动缸通过推拉杆驱动两个夹爪张开或夹紧;
捆扎盒为具有空腔的长方形结构,其右侧具有长条槽口,储带机构设在捆扎盒左侧的储带空腔内;
捆扎盒位于其长条槽口的前后侧壁上分别开设有第一直导槽和第二直导槽,第一直导槽和第二直导槽通过位于长条槽口左端侧壁的第一弧形导槽相连相通;
所述第一直导槽的左端通过送带通道与储带空腔相通,第一弧形导槽的前端与一段出带通道相通,所述拉带机构设置在出带通道上;
锁紧组件设置在捆扎盒的右侧,其包括锁紧座、锁紧块及第二电动缸,锁紧座的一端与捆扎盒位于第一弧形导槽的右端铰接;
第二电动缸设置在捆扎盒内,其活塞杆端部与锁紧座铰接,第二电动缸驱动锁紧座转动,使其另一端与第二直导槽的右端对接;
锁紧块设置在锁紧座内,所述锁紧座上设有第三电动缸,第二电动缸的活塞杆驱动锁紧块与锁紧座滑动配合;
所述锁紧块的侧壁上开设有第二弧形导槽,第二弧形导槽的前端通过位于锁紧座左端前侧的第三弧形导槽与第一直导槽相通,第二弧形导槽的后端通过位于锁紧座左端后侧的第四弧形导槽与第二直导槽相通;
储带机构包括储带托盘,所述储带托盘的转轴与捆扎盒的底部转动配合;
储带托盘的上方具有压带轮,压带轮设在推杆的一端,推杆与捆扎盒滑动配合,所述推杆的另一端设有弹簧;
所述送带机构设在送带通道上,其包括一上一下布置的两个送带辊,其中一个送带辊与第四伺服电机的输出端相连;
所述拉带机构包括一上一下布置的两个牵引辊,其中一个牵引辊与第五伺服电机的输出端相连。
2.根据权利要求1所述的一种用于医疗垃圾自动清理的机器人,其特征在于,行走轮有两组,对称布置在底座的左右两侧,每组行走轮包括前后间隔布置的至少两个行走轮;
每个所述行走轮均配有第一伺服电机,各第一伺服电机均由设在底座上的电源为其供电,其信号端均由设在底座上的电控装置通讯相连。
3.根据权利要求1所述的一种用于医疗垃圾自动清理的机器人,其特征在于,安装架是由C型钢制成的,其开口朝向右侧,C型钢的上端设有顶板,下端与底座固定相连成一体;
丝杠导杆机构包括第一丝杠、第二丝杠和四个导杆,四个导杆竖向布置在正方形的四角上,上端与顶板固定相连,下端与底架的顶部固定相连;
四个导杆均穿过第一滑动座和第二滑动座,所述第一丝杠、第二丝杠均竖向设置在四个导杆之间,各丝杠的下端分别配置有第二伺服电机,第一、第二丝杠分别驱动第一滑动座和第二滑动座各自独立升降。
4.根据权利要求1所述的一种用于医疗垃圾自动清理的机器人,其特征在于,所述机械臂包括上臂、中臂和前臂,所述上臂的两端分别通过关节组件与第二滑动座和中臂的一端转动相连;
中臂的一端通过同样的关节组件与前臂的一端转动相连,前臂的另一端与捆扎盒的左端固定相连。
说明书
技术领域
本发明涉及医疗器械技术领域,具体公开一种用于医疗垃圾自动清理的机器人。
背景技术
医疗垃圾放置在垃圾桶内,存放一段时间就需要收集起来运走统一处理,存放的时间会滋生一定量的病菌,现有医疗垃圾都是采用人工进行清理,工作过程佩戴手套和口罩,避免沾染细菌,整个过程劳动强度大,费时费力,清理效率低,佩戴防护用具尤其是在夏天容易带来各种不适。因此,需要开发一种能够自动清理医疗垃圾袋的机器人替代人工清理。
发明内容
针对上述现有技术的不足,本发明的目的是在于提出一种用于医疗垃圾自动清理的机器人,解决人工清理医疗垃圾劳动强度大,费时费力,工作效率低,尤其是易沾染病菌,对健康存在较大威胁的问题。
本发明为了实现上述目的,采用的技术解决方案是:
一种用于医疗垃圾自动清理的机器人,包括行走装置、升降装置、悬臂支架、收拢装置、机械臂及扎口装置,行走装置包括底座及行走轮,底座内侧设有电源及电控装置;
升降装置固定安装在行走装置的上方,其包括安装架、第一滑动座和第二滑动座,第一、第二滑动座一高一低相对设置在安装架内,且通过丝杠导杆机构与安装架活动相连;
收拢装置位于安装架的右侧,通过悬臂支架与第一滑动座固定相连,其包括安装圆盘、齿轮组件及多个夹持组件,安装圆盘设置在悬臂支架的下方;
所有夹持组件呈环形均匀布置在安装圆盘的下方,均通过竖向的连杆与安装圆盘活动相连,齿轮组件可驱动夹持组件和安装圆盘转动;
扎口装置位于收拢装置下方,包括捆扎盒以及设在捆扎盒上的储带机构、送带机构、拉带机构及锁紧组件,捆扎盒的左端通过机械臂与第二滑动座活动相连;
悬臂支架的左端与第一滑动座固定相连,安装圆盘通过轴套管与悬臂支架转动配合,所述轴套管的上端连接刹车电机的输出轴固定连接;
所述安装圆盘开设有与夹持组件数量相等且一一对应的第一长圆孔,各第一长圆孔呈环形均匀布置在安装圆盘上,其沿安装圆盘的法线方向延伸;
各第一长圆孔上方分别设有一条导轨,导轨的底部设有与其滑动配合的导滑块,各连杆的上端穿过对应的第一长圆孔与导滑块固定相连,导滑块通过连杆带动对应的夹持组件沿导轨运动;
齿轮组件包括大齿盘、小齿轮及第三伺服电机,所述大齿盘位于安装圆盘的下方,大齿盘的齿盘轴伸至轴套管的内部,且与其同轴转动配合;
小齿轮位于大齿盘的左侧且与其外啮合,小齿轮的齿轮轴与第三伺服电机的输出端固定相连,第三伺服电机安装在悬臂支架顶部;
大齿盘上开设有与第一长圆孔数量相等且一一对应的第二长圆孔,各第二长圆孔的延伸方向与第一长圆孔的延伸方向相对倾斜,各连杆的下端穿过其所在第一长圆孔对应的第二长圆孔,与夹持组件固定相连;
各夹持组件均位于对应导滑块下方,其包括支撑架、第一电动缸及两个夹爪,所述支撑架的顶部与对应连杆的下端固定相连,第一电动缸固定安装在支撑架上;
第一电动缸的活塞杆上设有横撑,横撑的中部与第一电动缸的活塞杆端部固定相连,横撑粘贴有双面胶带。
两个夹爪对称布置在支撑架的下端两侧,夹爪的上端与支撑架转动相连,中部通过推拉杆与横撑对应端转动相连,第一电动缸通过推拉杆驱动两个夹爪张开或夹紧;
捆扎盒为具有空腔的长方形结构,其右侧具有长条槽口,储带机构设在捆扎盒左侧的储带空腔内;
捆扎盒位于其长条槽口的前后侧壁上分别开设有第一直导槽和第二直导槽,第一直导槽和第二直导槽通过位于长条槽口左端侧壁的第一弧形导槽相连相通;
所述第一直导槽的左端通过送带通道与储带空腔相通,第一弧形导槽的前端与一段出带通道相通,所述拉带机构设置在出带通道上;
锁紧组件设置在捆扎盒的右侧,其包括锁紧座、锁紧块及第二电动缸,锁紧座的一端与捆扎盒位于第一弧形导槽的右端铰接;
第二电动缸设置在捆扎盒内,其活塞杆端部与锁紧座铰接,第二电动缸驱动锁紧座转动,使其另一端与第二直导槽的右端对接;
锁紧块设置在锁紧座内,所述锁紧座上设有第三电动缸,第二电动缸的活塞杆驱动锁紧块与锁紧座滑动配合;
所述锁紧块的侧壁上开设有第二弧形导槽第二弧形导槽的前端通过位于锁紧座左端前侧的第三弧形导槽与第一直导槽相通,第二弧形导槽的后端通过位于锁紧座左端后侧的第四弧形导槽与第二直导槽相通;
储带机构包括储带托盘,所述储带托盘的转轴与捆扎盒的底部转动配合;
储带托盘的上方具有压带轮,压带轮设在推杆的一端,推杆与捆扎盒滑动配合,所述推杆的另一端设有弹簧;
所述送带机构设在送带通道上,其包括一上一下布置的两个送带辊,其中一个送带辊与第四伺服电机的输出端相连;
所述拉带机构包括一上一下布置的两个牵引辊,其中一个牵引辊与第五伺服电机的输出端相连。
优选地,行走轮有两组,对称布置在底座的左右两侧,每组行走轮包括前后间隔布置的至少两个行走轮;
每个所述行走轮均配有第一伺服电机,各第一伺服电机均由设在底座上的电源为其供电,其信号端均由设在底座上的电控装置通讯相连。
优选地,安装架是由C型钢制成的,其开口朝向右侧,C型钢的上端设有顶板,下端与底座固定相连成一体。
丝杠导杆机构包括第一丝杠、第二丝杠和四个导杆,四个导杆竖向布置在正方形的四角上,上端与顶板固定相连,下端与底架的顶部固定相连。
四个导杆均穿过第一滑动座和第二滑动座,所述第一丝杠、第二丝杠均竖向设置在四个导杆之间,各丝杠的下端分别配置有第二伺服电机,第一、第二丝杠分别驱动第一滑动座和第二滑动座各自独立升降。
优选地,所述机械臂包括上臂、中臂和前臂,所述上臂的两端分别通过关节组件与第二滑动座和中臂的一端转动相连。
中臂的一端通过同样的关节组件与前臂的一端转动相连,前臂的另一端与捆扎盒的左端固定相连。
此外,本发明还提出了一种医疗垃圾自动清理方法,该方法基于上面提到的一种用于医疗垃圾自动清理的机器人,其具体技术方案如下:
一种医疗垃圾自动清理方法,包括如下工作步骤:
行走装置运动至垃圾桶的一侧,升降装置通过第一滑动座调节悬臂支架的高度,小齿轮驱动大齿盘转动,与安装圆盘的转动相配合,将夹持组件调节至安装圆盘的外端,各夹持组件分别与医疗垃圾桶的上边沿相对应;
第一电动缸通过横撑驱动两个夹爪张开,第一滑动座通过悬臂支架驱动各夹持组件继续向下运动,横撑底部的双面胶带与医疗垃圾桶的上边沿的塑料袋接触并粘附住,第一电动缸带动横撑上升;
两个夹爪夹紧塑料袋并提升一定高度,此时塑料袋底部仍压紧垃圾桶;之后,大齿盘通过驱动连杆驱动各夹持组件向内收缩,到位后,刹车电机解除对安装圆盘的制动,安装圆盘随大齿盘一起转动,并驱动塑料袋的袋口旋转,使塑料袋的上部形成颈缩结构;
第二电动缸驱动锁紧座、锁紧块位于长条槽口的前侧,长条槽口保持敞开状态,当塑料袋的颈缩部位进入长条槽口内并到达其左端时,第二电动缸驱动锁紧座、锁紧块闭合长条槽口,第一直导槽、第三弧形导槽、第二弧形导槽、第四弧形导槽、第二直导槽和第一弧形导槽首尾依次连接成闭合的环形结构;
两个送带辊驱动扎带的端部依次通过各导槽,当扎带的穿孔位置与出带通道对应时,送带辊不再转动,扎带的穿孔保持在该位置,所述扎带的端部到达第一弧形导槽的前端。
此时,第三电动缸驱动锁紧块相对于锁紧座向左运动,挤压扎带和塑料袋,扎带的端部穿过其穿孔,到达牵引辊的位置,两个牵引辊转动,继续拉伸扎带的端部,穿孔内的卡爪卡住扎带一侧的齿牙,使扎带扎紧塑料袋;锁紧块继续将塑料袋的颈缩位置压紧在长条槽口内,升降装置与机械臂相配合将垃圾袋从垃圾桶内提出,并运送至垃圾转运车上。
以上医疗垃圾自动清理方法,为上述用于医疗垃圾自动清理的机器人的操作方法,通过该操作方法,利于实现本发明中机器人对医疗垃圾的自动清理。
通过采用前述技术方案,本发明的有益技术效果是:本发明结构设计巧妙,自动化程度高,替代人工进行医疗垃圾袋收集(或清理),省事省力,提高了清理效率,同时,避免人工直接接触医疗垃圾,避免受到病毒的感染,保障工作人员的身体健康。
附图说明
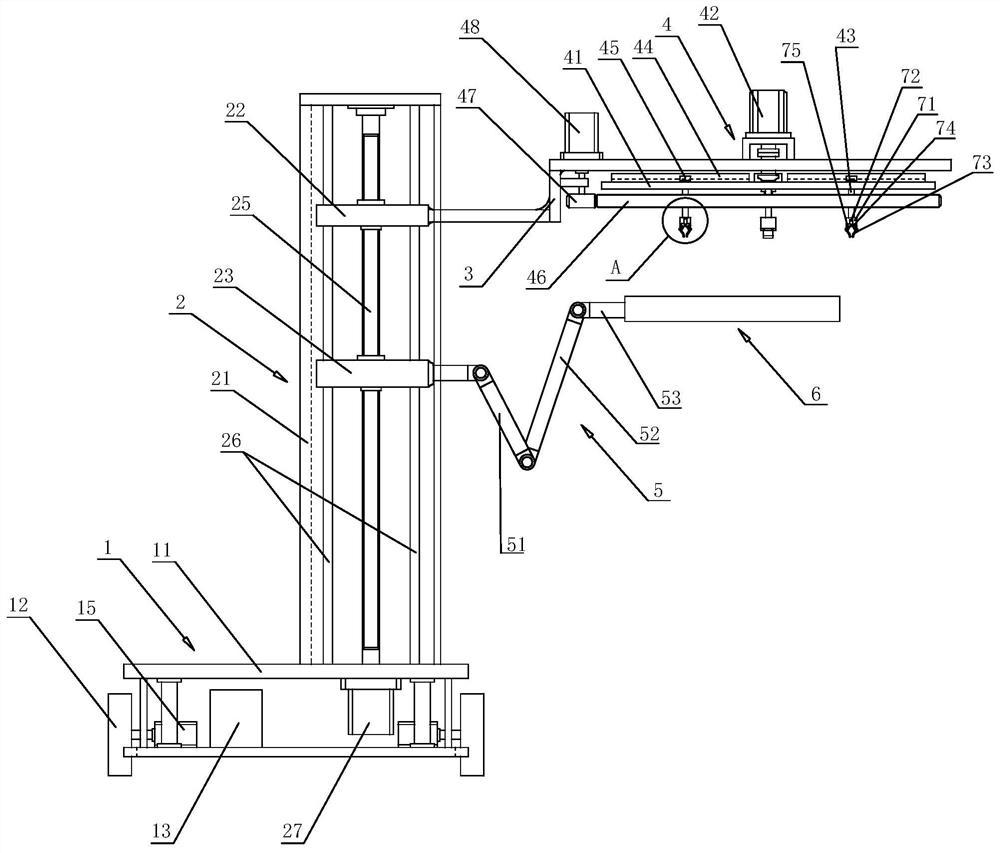
图1是本发明一种医疗垃圾收集机器人的结构原理示意图。
图2是图1中A部分的局部放大图。
图3是本发明一种医疗垃圾收集机器人的俯视结构示意图。
图4是图1中某一部分的结构示意图,示出的是安装圆盘、大齿盘及相关部分。
图5是图4中某一部分的结构示意图,示出的是大齿盘。
图6是图4中另一部分的结构示意图,示出的是安装圆盘及相关部分。
图7是图6中某一部分的结构示意图,示出的是连杆、导轨及导滑块等相关部分。
图8是图1中另一部分的结构示意图,示出的是扎口装置。
图9是本发明所使用的扎带的结构示意图。
图10是图7中示出的扎口装置的锁紧块顶出状态下的结构示意图。
具体实施方式
下面结合附图对本发明进行详细说明:
实施例1
结合图1至图10,一种用于医疗垃圾自动清理的机器人,包括行走装置1、升降装置2、悬臂支架3、收拢装置4、机械臂5及扎口装置6,行走装置1包括底座11及行走轮12,底座11内侧设有电源13及电控装置14。行走轮12有两组,对称布置在底座11的左右两侧,每组行走轮12包括前后间隔布置的两个行走轮12。每个所述行走轮12均配有第一伺服电机15,各第一伺服电机15均由设在底座11上的电源13为其供电,其信号端均由设在底座11上的电控装置14通讯相连,所述电控装置14采用现有技术已有的单片机。
升降装置2固定安装在行走装置1的上方,其包括安装架21、第一滑动座22和第二滑动座23,安装架21是由C型钢制成的,其开口朝向右侧,C型钢的上端设有顶板,下端与底座11固定相连成一体。第一滑动座22、第二滑动座23一高一低相对设置在安装架21内,且通过丝杠导杆机构与安装架21活动相连。
丝杠导杆机构包括第一丝杠24、第二丝杠25和四个导杆26,四个导杆26竖向布置在正方形的四角上,上端与顶板固定相连,下端与底架的顶部固定相连。四个导杆26均穿过第一滑动座22和第二滑动座23,所述第一丝杠24、第二丝杠25均竖向设置在四个导杆26之间,各丝杠的下端分别配置有第二伺服电机27,第一丝杠24、第二丝杠25分别驱动第一滑动座22和第二滑动座23各自独立升降。具体地,所述第一丝杠24与第一滑动座22螺纹配合,所述第二丝杠25与第二滑动座23螺纹配合,所述第一滑动座22与第二丝杠25对应的位置开有方形窗口,所述第二丝杠25穿过方形窗口与第一滑动座22不接触,保证第一滑动座22和第二滑动座23各自独立驱动,各第二伺服电机27驱动对应的丝杠转动,丝杠驱动对应的滑动座沿导杆26升高或降低。
收拢装置4位于安装架21的右侧,通过悬臂支架3与第一滑动座22固定相连,其包括安装圆盘41、齿轮组件及多个夹持组件,安装圆盘41设置在悬臂支架3的下方。悬臂支架3的左端与第一滑动座22固定相连,安装圆盘41通过轴套管与悬臂支架3转动配合,所述轴套管的上端连接刹车电机42的输出轴固定连接。所述安装圆盘41开设有与夹持组件数量相等且一一对应的第一长圆孔411,各第一长圆孔411呈环形均匀布置在安装圆盘41上,其沿安装圆盘41的法线方向延伸。
所有夹持组件呈环形均匀布置在安装圆盘41的下方,均通过竖向的连杆43与安装圆盘41活动相连,齿轮组件可驱动夹持组件和安装圆盘41转动。各第一长圆孔411上方分别设有一条导轨44,导轨44的底部具有与下方第一长圆孔411方向一致的燕尾槽,所述导轨44的底部设有与其滑动配合的导滑块45,导滑块45在燕尾槽滑动,各连杆43的上端穿过对应的第一长圆孔411与导滑块45固定相连,导滑块45通过连杆43带动对应的夹持组件沿导轨44运动。由于导轨44与对应第一长圆孔411的方向一致,各导滑块45与其下方的连杆43可沿对应的导轨44滑动。
齿轮组件包括大齿盘46、小齿轮47及第三伺服电机48,所述大齿盘46位于安装圆盘41的下方,大齿盘46的齿盘轴伸至轴套管的内部,且与其同轴转动配合。小齿轮47位于大齿盘46的左侧且与其外啮合,小齿轮47的齿轮轴与第三伺服电机48的输出端固定相连,第三伺服电机48安装在悬臂支架3顶部。大齿盘46上开设有与第一长圆孔411数量相等且一一对应的第二长圆孔461,各第二长圆孔461的延伸方向与第一长圆孔411的延伸方向相对倾斜,各连杆43的下端穿过其所在第一长圆孔411对应的第二长圆孔461,与夹持组件固定相连。小齿轮47驱动大齿盘46转动,大齿盘46转动时,刹车电机42对安装圆盘41进行制动,大齿盘46可驱动各连杆43沿第一长圆孔411运动,连杆43带动所有夹持组件向内收缩或者外扩。
各夹持组件均位于对应导滑块45下方,其包括支撑架71、第一电动缸72及两个夹爪73,所述支撑架71的顶部与对应连杆43的下端固定相连,第一电动缸72固定安装在支撑架71上。第一电动缸72的活塞杆上设有横撑74,横撑74的中部与第一电动缸72的活塞杆端部固定相连,横撑74粘贴有双面胶带。两个夹爪73对称布置在支撑架71的下端两侧,夹爪73的上端与支撑架71转动相连,中部通过推拉杆75与横撑74对应端转动相连,第一电动缸72通过推拉杆75驱动两个夹爪73张开或夹紧。
工作状态下,行走装置1运动至垃圾桶的一侧,升降装置2通过第一滑动座22调节悬臂支架3的高度,小齿轮47驱动大齿盘46转动,与安装圆盘41的转动相配合,将夹持组件调节至安装圆盘41的外端,各夹持组件分别与医疗垃圾桶的上边沿相对应。同时,第一电动缸72通过横撑74驱动两个夹爪73张开,第一滑动座22通过悬臂支架3驱动各夹持组件继续向下运动,横撑74底部的双面胶带与医疗垃圾桶的上边沿的塑料袋接触并粘附住,第一电动缸72带动横撑74上升,同时,两个夹爪73夹紧塑料袋并提升一定高度,此时塑料袋底部仍压紧垃圾桶。之后,大齿盘46通过驱动连杆43驱动各夹持组件向内收缩,到位后,刹车电机42解除对安装圆盘41的制动,安装圆盘41随大齿盘46一起转动,并驱动塑料袋的袋口旋转,使塑料袋的上部形成颈缩结构。
扎口装置6位于收拢装置4下方,包括捆扎盒61以及设在捆扎盒61上的储带机构、送带机构、拉带机构及锁紧组件8,捆扎盒61的左端通过机械臂5与第二滑动座23活动相连。所述机械臂5包括上臂51、中臂52和前臂53,所述上臂51的两端分别通过关节组件与第二滑动座23和中臂52的一端转动相连。中臂52的一端通过同样的关节组件与前臂53的一端转动相连,前臂53的另一端与捆扎盒61的左端固定相连。
本发明采用现有技术已有的塑料制成的扎带对塑料袋进行扎口,所述扎带如图8所示,若干根扎带首尾依次相连。捆扎盒61为具有空腔的长方形结构,其右侧具有长条槽口62,储带机构设在捆扎盒61左侧的储带空腔68内。储带机构包括储带托盘91,所述储带托盘91的转轴与捆扎盒61的底部转动配合,所述捆扎盒61位于储带空腔68上方的位置配置有盖体,打开盖体可将成盘的扎带放入到储带托盘91上,成盘的扎带可随储带托盘91一起转动。储带托盘91的上方一侧具有压带轮92,压带轮92设在推杆93的一端,压带轮92的轮轴与推杆93转动配合,推杆93与捆扎盒61的实体部分滑动配合,保证推杆93沿其轴线直线运动,所述推杆93的另一端设有弹簧94。弹簧94始终处于压缩状态,弹簧力通过推杆93使压带轮92压紧在成盘的扎带的外表面,防止其松散。
捆扎盒61位于其长条槽口62的前后侧壁上分别开设有第一直导槽63和第二直导槽64,第一直导槽63和第二直导槽64通过位于长条槽口62左端侧壁的第一弧形导槽65相连相通。所述第一直导槽63的左端通过送带通道66与储带空腔68相通,第一弧形导槽65的前端与一段出带通道67相通,所述拉带机构设置在出带通道67上。所述送带机构设在送带通道66上,其包括一上一下布置的两个送带辊95,其中一个送带辊95与第四伺服电机97的输出端相连。所述拉带机构包括一上一下布置的两个牵引辊96,其中一个牵引辊96与第五伺服电机98的输出端相连。
成盘的扎带的一端穿入送带通道66内,并由两个送带辊95之间通过,两个送带辊95夹紧扎带并向右侧输送至第一直导槽63内。
具体地,锁紧组件8设置在捆扎盒61的右侧,其包括锁紧座81、锁紧块82及第二电动缸83,锁紧座81的一端与捆扎盒61位于第一弧形导槽65的右端铰接。第二电动缸83设置在捆扎盒61内,其活塞杆端部与锁紧座81铰接,第二电动缸83驱动锁紧座81转动,使其另一端与第二直导槽64的右端对接。锁紧块82设置在锁紧座81内,所述锁紧座81上设有第三电动缸84,第二电动缸83的活塞杆驱动锁紧块82与锁紧座81滑动配合。所述锁紧块82的侧壁上开设有第二弧形导槽821,第二弧形导槽821的前端通过位于锁紧座81左端前侧的第三弧形导槽811与第一直导槽63相通,第二弧形导槽821的后端通过位于锁紧座81左端后侧的第四弧形导槽812与第二直导槽64相通。
工作状态下,第二电动缸83驱动锁紧座81、锁紧块82位于长条槽口62的前侧,长条槽口62保持敞开状态,当塑料袋的颈缩部位进入长条槽口62内并到达其左端时,第二电动缸83驱动锁紧座81、锁紧块82闭合长条槽口62,第一直导槽63、第三弧形导槽811、第二弧形导槽821、第四弧形导槽812、第二直导槽64和第一弧形导槽65首尾依次连接成闭合的环形结构。两个送带辊95驱动扎带的端部依次通过各导槽,当扎带的穿孔位置与出带通道67对应时,送带辊95不再转动,扎带的穿孔保持在该位置,所述扎带的端部到达第一弧形导槽65的前端。
此时,第三电动缸84驱动锁紧块82相对于锁紧座81向左运动,挤压扎带和塑料袋,扎带的端部穿过其穿孔,到达牵引辊96的位置,两个牵引辊96转动,继续拉伸扎带的端部,穿孔内的卡爪卡住扎带一侧的齿牙,使扎带扎紧塑料袋。锁紧块82继续将塑料袋的颈缩位置压紧在长条槽口62内,升降装置2与机械臂5相配合将垃圾袋从垃圾桶内提出,并运送至垃圾转运车上。
由以上结构和过程描述不难看出,本实施例1中机器人结构设计巧妙,自动化程度高,替代人工进行医疗垃圾袋清理,省事省力,提高了清理效率,同时,避免人工直接接触医疗垃圾,避免受到病毒的感染,保障工作人员的身体健康。
实施例2
本实施例2述及了一种医疗垃圾自动清理方法,该医疗垃圾自动清理方法为上述实施例1中用于医疗垃圾自动清理的机器人的操作方法。
通过该自动清理方法,使得本发明机器人能够实现对医疗垃圾的自动清理。
具体过程如下:
工作状态下,行走装置1运动至垃圾桶的一侧,升降装置2通过第一滑动座22调节悬臂支架3的高度,小齿轮47驱动大齿盘46转动,与安装圆盘41的转动相配合,将夹持组件调节至安装圆盘41的外端,各夹持组件分别与医疗垃圾桶的上边沿相对应。
第一电动缸72通过横撑74驱动两个夹爪73张开,第一滑动座22通过悬臂支架3驱动各夹持组件继续向下运动,横撑74底部的双面胶带与医疗垃圾桶的上边沿的塑料袋接触并粘附住,第一电动缸72带动横撑74上升。
两个夹爪73夹紧塑料袋并提升一定高度,此时塑料袋底部仍压紧垃圾桶。之后,大齿盘46通过驱动连杆43驱动各夹持组件向内收缩,到位后,刹车电机42解除对安装圆盘41的制动,安装圆盘41随大齿盘46一起转动,并驱动塑料袋的袋口旋转,使塑料袋的上部形成颈缩结构。
第二电动缸83驱动锁紧座81、锁紧块82位于长条槽口62的前侧,长条槽口62保持敞开状态,当塑料袋的颈缩部位进入长条槽口62内并到达其左端时,第二电动缸83驱动锁紧座81、锁紧块82闭合长条槽口62,第一直导槽63、第三弧形导槽811、第二弧形导槽821、第四弧形导槽812、第二直导槽64和第一弧形导槽65首尾依次连接成闭合的环形结构。
两个送带辊95驱动扎带的端部依次通过各导槽,当扎带的穿孔位置与出带通道67对应时,送带辊95不再转动,扎带的穿孔保持在该位置,所述扎带的端部到达第一弧形导槽65的前端。此时,第三电动缸84驱动锁紧块82相对于锁紧座81向左运动,挤压扎带和塑料袋,扎带的端部穿过其穿孔,到达牵引辊96的位置,两个牵引辊96转动,继续拉伸扎带的端部,穿孔内的卡爪卡住扎带一侧的齿牙,使扎带扎紧塑料袋。
锁紧块82继续将塑料袋的颈缩位置压紧在长条槽口62内,升降装置2与机械臂5相配合将垃圾袋从垃圾桶内提出,并运送至垃圾转运车上。
本实施例2方法给出了上述实施例1中机器人的操作方法,利于实现机器人对医疗垃圾的自动清理工作,相比于人工进行医疗垃圾袋收集,省事省力,提高了收集效率。
本发明中未述及的部分采用或借鉴已有技术即可实现。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
当然,上述说明并非是对本发明的限制,本发明也并不仅限于上述举例,本技术领域的技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也应属于本发明的保护范围。
一种用于医疗垃圾自动清理的机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。






动态评分
0.0