








专利摘要
本发明公开了一种整体叶盘激光冲击强化方法,该方法首先将整体叶盘通过夹具安装在轨迹机器人末端的法兰盘上,然后将光路系统依次设定为光路三(9)工作、光路一(15)工作、光路四(10)工作、光路二(14)工作、光路四(10)工作和光路二(14)工作,依次分别对整体叶盘叶片的叶背后缘区域(3)、叶盆前缘区域(6)、叶盆后缘区域(4)、叶背前缘区域(1)、叶盆叶尖区域(5)和叶背叶尖区域(2)进行激光冲击强化。本发明激光冲击强化方法简单,叶盘激光冲击强化后,残余压应力可达300MPa以上,高频振动疲劳寿命提高约6~30倍以上,工件变形较小。
权利要求
1.一种整体叶盘激光冲击强化方法,其特征在于:该方法首先将整体叶盘(107)通过夹具安装在轨迹机器人末端的法兰盘上,然后将光路系统(103)依次设定为光路三(409)工作、光路一(415)工作、光路四(410)工作、光路二(414)工作、光路四(410)工作和光路二(414)工作,依次分别对整体叶盘叶片的叶背后缘区域(403)、叶盆前缘区域(406)、叶盆后缘区域(404)、叶背前缘区域(401)、叶盆叶尖区域(405)和叶背叶尖区域(402)进行激光冲击强化。
2.按照权利要求1所述的整体叶盘激光冲击强化方法,其特征在于:该方法具体包括如下步骤:
(1)叶背后缘区域(403)加工:光路系统(103)切换到光路三(409)工作,轨迹机器人(106)带着叶盘(107)运动,从叶背后缘区域(403)的叶根处开始按照预定轨迹逐点向叶尖方向加工,加工完一个叶片后,由轨迹机器人控制自动切换到下一叶片进行加工,直至加工完成为止;
(2)叶盆前缘区域(406)加工:光路系统(103)切换到光路一(415)工作,轨迹机器人(106)带着叶盘(107)运动,从叶盆前缘区域(406)的叶根处开始按照预定轨迹逐点向叶尖方向加工,加工完一个叶片后,由轨迹机器人控制自动切换到下一叶片进行加工,直至加工完成为止;
(3)叶盆后缘区域(404)加工:光路系统(103)切换到光路四(410)工作,轨迹机器人(106)带着叶盘(107)运动,从叶盆后缘区域(404)的叶根处开始按照预定轨迹逐点向叶尖方向加工,加工完一个叶片后,由轨迹机器人控制自动切换到下一叶片进行加工,直至加工完成为止;
(4)叶背前缘区域(401)加工:光路系统(103)切换到光路二(414)工作,轨迹机器人(106)带着叶盘(107)运动,从叶背前缘区域(401)的叶根处开始按照预定轨迹逐点向叶尖方向加工,加工完一个叶片后,由轨迹机器人控制自动切换到下一叶片进行加工,直至加工完成为止;
(5)叶盆叶尖区域(405)加工:光路系统(103)切换到光路四(410)工作,轨迹机器人(106)带着叶盘(107)运动,从叶盆叶尖区域(405)的叶根处开始按照预定轨迹逐点向叶尖方向加工,加工完一个叶片后,由轨迹机器人控制自动切换到下一叶片进行加工,直至加工完成为止;
(6)叶背叶尖区域(402)加工:光路系统(103)切换到光路二(414)工作,轨迹机器人(106)带着叶盘(107)运动,从叶背叶尖区域(402)的叶根处开始按照预定轨迹逐点向叶尖方向加工,加工完一个叶片后,由轨迹机器人控制自动切换到下一叶片进行加工,直至加工完成为止。
3.按照权利要求2所述的整体叶盘激光冲击强化方法,其特征在于:所述光路系统包括:安装在光学平台(515)上的光路一与光路二切换滑台(501)、光路三与光路四切换滑台(514)以及出光口滑台(517);安装在激光器(102)内部用于光路切换的数控滑台(521);安装在光学平台(515)上的光路三转台(509)和光路一转台(506);安装在光学平台(515)上的光路三与光路四校验滑台(526)和光路一与光路二校验滑台(531);安装在光学平台(515)上的光路二反射镜(502)、光路四反射镜(512)、反射镜A(516)和反射镜B(523);安装在光学平台(515)上的光路一聚焦镜(505)、光路三聚焦镜(511)、光路二聚焦镜(525)和光路四聚焦镜(532),安装在光学平台(515)上的光路二匀光镜片(524)和光路四匀光镜片(533),所述光路二聚焦镜(525)和光路二匀光镜片(524)组成光路二匀光聚焦镜组(504),所述光路四聚焦镜(532)和光路四匀光镜片(533)组成光路四匀光聚焦镜组(510);分别安装在光路一转台(506)和光路三转台(509)上的光路一摆臂(528)和光路三摆臂(529);分别安装在光路一摆臂(528)末端和光路三摆臂(529)末端的光路一小反射镜(507)和光路三小反射镜(508);分别安装在光路一与光路二切换滑台(501)和光路三与光路四切换滑台(514)上的光路一反射镜(503)和光路三反射镜(513);安装在出光口滑台(517)上的反射镜C(518)和反射镜D(522);安装在数控滑台(521)上的反射镜E(520);安装在激光器(102)内部的合束镜(537);分别安装在光路三与光路四校验滑台(526)和光路一与光路二校验滑台(531)上的光路三与光路四校验能量计(527)和光路一与光路二校验能量计(530);安装在光学平台(515)上的防护板(534)、防护罩(535)和导光管(903);所述反射镜E(520)在伺服电机的驱动下或手动旋转伺服电机后端的旋钮,能够在数控滑台(521)上滑动;激光器上设置出光口A和出光口B;当反射镜E(520)处在出光口A正前方时,激光束A经反射镜E(520)反射至合束镜(537),再经合束镜(537)反射出的激光与激光束B均由出光孔B输出;当反射镜E(520)处在出光口A和出光口B之间的位置时,激光束A和激光束B分别从出光口A和出光口B输出。
4.按照权利要求3所述的整体叶盘激光冲击强化方法,其特征在于:所述光路系统(103)切换到光路三(409)工作是指:当光路一摆臂(528)不处在工作位置,当反射镜E(520)处在A出光口正前方时,激光束A经反射镜E(520)反射,至合束镜(537),再经合束镜(537)反射出的激光与激光束B均由出光孔B输出,同时当反射镜C(518)正处于出光孔B的后方时,B出光孔输出的激光经反射镜C(518)的反射可以反射到反射镜C(518)左方的反射镜A(516)上,同时当光路三反射镜(513)正处于反射镜A(516)反射光路的正后方时,反射镜A(516)反射来激光经光路三反射镜(513)反射到光路三聚焦镜(511)上,光路三摆臂(529)摆至光路三小反射镜(508)正好处于光路三聚焦镜(511)输出光路的正右方时,光路三小反射镜(508)将经光路三聚焦镜(511)输出的激光反射到工件表面,形成直径为2-5mm的光强均匀的圆形光斑,加工航空发动机叶盘的叶背后缘区域(403);
所述光路系统(103)切换到光路一(415)工作是指:当光路三摆臂(529)不处在工作位置,当反射镜E(520)处在出光口A正前方时,激光束A经反射镜E(520)反射,至合束镜(537),再经合束镜(537)反射出的激光与激光束B均由出光孔B输出,同时当反射镜C(518)和反射镜D(522)分别正处于出光孔A和出光孔B的正后方时,出光孔B输出的激光经反射镜D(522)的反射反射到反射镜D(522)右方的反射镜B(523)上,同时当光路一反射镜(503)正处于反射镜B(523)反射光路的正后方时,反射镜B(523)反射来激光经光路一反射镜(503)反射到光路一聚焦镜(505)上,同时当光路一摆臂(528)摆至光路一小反射镜(507)正好处于光路一聚焦镜(505)输出光路的正左方时,光路一小反射镜(507)将经光路一聚焦镜(505)输出的激光反射到工件表面,形成直径为2-5mm的光强均匀的圆形光斑,加工航空发动机叶盘的叶盆前缘区域(406);
所述光路系统(103)切换到光路四(410)工作是指:当光路一摆臂(528)和光路三摆臂(529)均不处在工作位置,当反射镜E(520)处在A出光口正前方时,激光束A经反射镜E(520)反射,至合束镜(537),再经合束镜(537)反射出的激光与激光束B均由出光孔B输出,同时当反射镜C(518)正处于出光孔B的后方时,B出光孔输出的激光经反射镜C(518)的反射可以反射到反射镜C(518)左方的反射镜A(516)上,同时当光路三反射镜(513)不处于反射镜A(516)反射光路的正后方时,反射镜A(516)反射来激光经光路四反射镜(512)反射到光路四匀光聚焦镜组(510)上,形成边长2-5mm的光强均匀的方形光斑,加工航空发动机叶盘的叶盆后缘区域(404)和叶盆叶尖区域(405);
所述光路系统(103)切换到光路二(414)工作是指:当光路一摆臂(528)和光路三摆臂(529)均不处在工作位置,当反射镜E(520)处在出光口A正前方时,激光束A经反射镜E(520)反射,至合束镜(537),再经合束镜(537)反射出的激光与激光束B均由出光孔B输出,同时当反射镜C(518)和反射镜D(522)分别正处于出光孔A和出光孔B的后方时,B出光孔输出的激光经反射镜D(522)的反射反射到反射镜D(522)正右方的反射镜B(523)上,同时当光路一反射镜(503)不处于反射镜B(523)反射光路的正后方时,反射镜B(523)反射来激光经光路二反射镜(502)反射到光路二匀光聚焦镜组(504)上,形成边长2-5mm的光强均匀的方形光斑,加工航空发动机叶盘的叶背前缘区域(401)和叶背叶尖区域(402)。
5.按照权利要求4所述的整体叶盘激光冲击强化方法,其特征在于:对整体叶盘进行激光冲击强化前,先对光路系统的光路三(409)、光路四(410)、光路二(414)和光路一(415)进行校验,确保均能正常工作。
6.按照权利要求2所述的整体叶盘激光冲击强化方法,其特征在于:对整体叶盘各个区域加工前,先在待加工区域上粘贴厚度为100μm的、宽度为14mm的黑胶带作为吸收层,对该区域加工完成后,清除其上的黑胶带。
7.按照权利要求2所述的整体叶盘激光冲击强化方法,其特征在于:所述激光冲击强化过程中,采用去离子水作为约束层;去离子水的电阻率为18兆,约束层的厚度为1-2mm,且厚度均匀。
8.按照权利要求4所述的整体叶盘激光冲击强化方法,其特征在于:激光束A和激光束B为输入波长为1064nm、单脉冲能量为3-20J、脉宽为8-25ns、光束直径<27mm,发散角<3mrad的激光束,所述光路三(409)和光路一(415)输出单脉冲能量6-10J、脉宽15-20ns、光斑直径大小为3mm的圆形激光束。
9.按照权利要求4所述的整体叶盘激光冲击强化方法,其特征在于:激光束A和激光束B为输入波长为1064nm、单脉冲能量为3-20J、脉宽为8-25ns、光束直径<27mm,发散角<3mrad的激光束,所述光路四(410)和光路二(414)输出单脉冲能量7-10J、脉宽15-20ns、光斑大小为边长3mm的方形激光束。
10.按照权利要求1所述的整体叶盘激光冲击强化方法,其特征在于:所述轨迹机器人的重复定位精度为±0.09mm。
11.按照权利要求1所述的整体叶盘激光冲击强化方法,其特征在于:所述激光冲击强化的方式采用轨迹机器人移动一下,激光冲击一下的方式进行加工,即逐点进行加工。
12.按照权利要求4所述的整体叶盘激光冲击强化方法,其特征在于:所述激光冲击强化中,圆形光斑的搭接率为20%-30%,方形光斑的搭接率为5%-15%。
13.按照权利要求12所述的整体叶盘激光冲击强化方法,其特征在于:所述整体叶盘的激光冲击强化区域为叶背前缘12mm内的区域,叶背叶尖12mm内的区域,叶背后缘12mm内的区域,叶盆后缘12mm内的区域,叶盆叶尖12mm的区域,叶盆前缘12mm的区域,即叶片周边12mm内的区域范围,叶根区域不进行加工。
14.按照权利要求13所述的整体叶盘激光冲击强化方法,其特征在于:所述预定轨迹是指:整体叶盘的激光冲击强化,针对每个前缘和后缘的加工区域,冲击强化的先后次序为:首先在边缘处从叶根方向向叶尖方向加工,然后向叶片内部偏移指定距离再从叶根方向向叶尖方向加工,共往复4次;针对每个叶尖的加工区域,冲击强化的先后次序为:首先在叶尖处从前缘方向向后缘方向加工,然后向叶片内部偏移指定距离再从前缘方向向后缘方向加工,共往复4次;所述指定距离是指按照圆形光斑或方形光斑的搭接率向叶片内部偏移。
15.按照权利要求14所述的整体叶盘激光冲击强化方法,其特征在于:所述整体叶盘的激光冲击强化,针对靠近叶片内部的最后一道加工,能量比前3道所用的能量低20%。
说明书
技术领域
本发明涉及应用在航空发动机整体叶盘叶片表面处理技术领域,具体涉及一种整体叶盘激光冲击强化方法。
背景技术
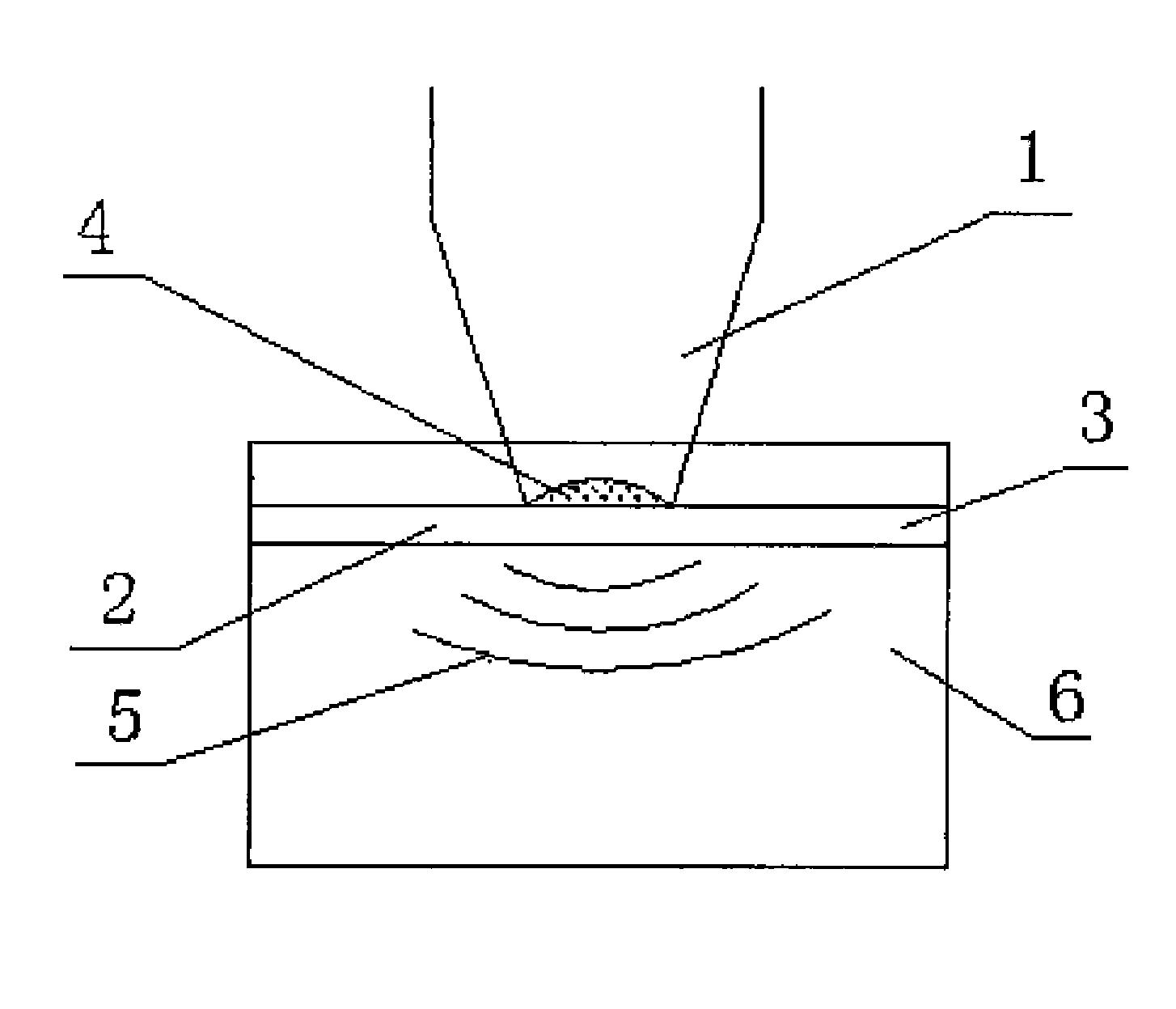
激光冲击强化技术是利用强激光束产生的等离子冲击波,可在深度大于1mm的工件表面产生压缩表面残余应力,提高叶片的抗损伤裕度及疲劳性能,与冷挤压、喷丸等金属材料表面强化手段相比,具有非接触、无热影响区、可控性强以及强化效果显著等突出优点。经激光冲击强化的叶片的抗异物破坏能力和疲劳性能大幅度提升,甚至已强化叶片边缘缺口小于3mm时,其使用寿命仍与完好的未强化叶片相当。
整体叶盘把叶片和轮盘设计为一个零件,代替通常叶片榫齿与轮盘榫槽再加锁片的连接结构,提高了发动机的气动效率、推重比及可靠性。单个叶片的传统强化技术是喷丸强化,喷丸强化对表面不规则部件实施困难,容易引起薄壁件的变形,对表面粗糙度和尺寸可能产生影响。
激光冲击强化具有可控性,可以对零件上指定的区域进行强化,本发明针对航空发动机整体叶盘提出了一种激光冲击强化方法,在叶片表面形成压应力层、可以大幅度提高航空发动机叶盘的抗疲劳和抗拉应力腐蚀等性能指标。本发明的应用,对于解决飞机发动机整体叶盘疲劳断裂问题,提高其可靠性将具有重大意义。
发明内容
本发明的目的是提供用于航空发动机的一种整体叶盘激光冲击强化方法,该激光冲击强化方法简单,强化质量好、工件变形较小、生产效率高。
本发明的技术方案为:
一种整体叶盘激光冲击强化方法,该方法首先将整体叶盘通过夹具安装在轨迹机器人末端的法兰盘上,然后将光路系统依次设定为光路三工作、光路一工作、光路四工作、光路二工作、光路四工作和光路二工作,依次分别对整体叶盘叶片的叶背后缘区域、叶盆前缘区域、叶盆后缘区域、叶背前缘区域、叶盆叶尖区域和叶背叶尖区域进行激光冲击强化。具体包括如下步骤:
(1)叶背后缘区域加工:光路系统切换到光路三工作,轨迹机器人带着叶盘运动,从叶背后缘区域的叶根处开始按照预定轨迹逐点向叶尖方向加工,加工完一个叶片后,由轨迹机器人控制自动切换到下一叶片进行加工,直至加工完成为止;
(2)叶盆前缘区域加工:光路系统切换到光路一工作,轨迹机器人带着叶盘运动,从叶盆前缘区域的叶根处开始按照预定轨迹逐点向叶尖方向加工,加工完一个叶片后,由轨迹机器人控制自动切换到下一叶片进行加工,直至加工完成为止;
(3)叶盆后缘区域加工:光路系统切换到光路四工作,轨迹机器人带着叶盘运动,从叶盆后缘区域的叶根处开始按照预定轨迹逐点向叶尖方向加工,加工完一个叶片后,由轨迹机器人控制自动切换到下一叶片进行加工,直至加工完成为止;
(4)叶背前缘区域加工:光路系统切换到光路二工作,轨迹机器人带着叶盘运动,从叶背前缘区域的叶根处开始按照预定轨迹逐点向叶尖方向加工,加工完一个叶片后,由轨迹机器人控制自动切换到下一叶片进行加工,直至加工完成为止;
(5)叶盆叶尖区域加工:光路系统切换到光路四工作,轨迹机器人带着叶盘运动,从叶盆叶尖区域的叶根处开始按照预定轨迹逐点向叶尖方向加工,加工完一个叶片后,由轨迹机器人控制自动切换到下一叶片进行加工,直至加工完成为止;
(6)叶背叶尖区域加工:光路系统切换到光路二工作,轨迹机器人带着叶盘运动,从叶背叶尖区域的叶根处开始按照预定轨迹逐点向叶尖方向加工,加工完一个叶片后,由轨迹机器人控制自动切换到下一叶片进行加工,直至加工完成为止。
所述光路系统包括:安装在光学平台上的光路一与光路二切换滑台、光路三与光路四切换滑台以及出光口滑台;安装在激光器内部用于光路切换的数控滑台;安装在光学平台上的光路三转台和光路一转台;安装在光学平台上的光路三与光路四校验滑台和光路一与光路二校验滑台;安装在光学平台上的光路二反射镜、光路四反射镜、反射镜A和反射镜B;安装在光学平台上的光路一聚焦镜、光路三聚焦镜、光路二聚焦镜和光路四聚焦镜,安装在光学平台上的光路二匀光镜片和光路四匀光镜片,所述光路二聚焦镜和光路二匀光镜片组成光路二匀光聚焦镜组,所述光路四聚焦镜和光路四匀光镜片组成光路四匀光聚焦镜组;分别安装在光路一转台和光路三转台上的光路一摆臂和光路三摆臂;分别安装在光路一摆臂末端和光路三摆臂末端的光路一小反射镜和光路三小反射镜;分别安装在光路一与光路二切换滑台和光路三与光路四切换滑台上的光路一反射镜和光路三反射镜;安装在出光口滑台上的反射镜C和反射镜D;安装在数控滑台上的反射镜E;安装在激光器内部的合束镜;分别安装在光路三与光路四校验滑台和光路一与光路二校验滑台上的光路三与光路四校验能量计和光路一与光路二校验能量计;安装在光学平台上的防护板、防护罩和导光管。
所述反射镜E在伺服电机的驱动下或手动旋转伺服电机后端的旋钮,能够在数控滑台上滑动;激光器上设置出光口A和出光口B;当反射镜E处在出光口A正前方时,激光束A经反射镜E反射至合束镜,再经合束镜反射出的激光与激光束B均由出光孔B输出;当反射镜E处在出光口A和出光口B之间的位置时,激光束A和激光束B分别从出光口A和出光口B输出。
所述光路系统切换到光路三工作是指:当光路一摆臂不处在工作位置,当反射镜E处在A出光口正前方时,激光束A经反射镜E反射,至合束镜,再经合束镜反射出的激光与激光束B均由出光孔B输出,同时当反射镜C正处于出光孔B的后方时,B出光孔输出的激光经反射镜C的反射可以反射到反射镜C左方的反射镜A上,同时当光路三反射镜正处于反射镜A反射光路的正后方时,反射镜A反射来激光经光路三反射镜反射到光路三聚焦镜上,光路三摆臂摆至光路三小反射镜正好处于光路三聚焦镜输出光路的正右方时,光路三小反射镜将经光路三聚焦镜输出的激光反射到工件表面,形成直径为2-5mm的光强均匀的圆形光斑,加工航空发动机叶盘的叶背后缘区域;
所述光路系统切换到光路一工作是指:当光路三摆臂不处在工作位置,当反射镜E处在出光口A正前方时,激光束A经反射镜E反射,至合束镜,再经合束镜反射出的激光与激光束B均由出光孔B输出,同时当反射镜C和反射镜D分别正处于出光孔A和出光孔B的正后方时,出光孔B输出的激光经反射镜D的反射反射到反射镜D右方的反射镜B上,同时当光路一反射镜正处于反射镜B反射光路的正后方时,反射镜B反射来激光经光路一反射镜反射到光路一聚焦镜上,同时当光路一摆臂摆至光路一小反射镜正好处于光路一聚焦镜输出光路的正左方时,光路一小反射镜将经光路一聚焦镜输出的激光反射到工件表面,形成直径为2-5mm的光强均匀的圆形光斑,加工航空发动机叶盘的叶盆前缘区域;
所述光路系统切换到光路四工作是指:当光路一摆臂和光路三摆臂均不处在工作位置,当反射镜E处在A出光口正前方时,激光束A经反射镜E反射,至合束镜,再经合束镜反射出的激光与激光束B均由出光孔B输出,同时当反射镜C正处于出光孔B的后方时,B出光孔输出的激光经反射镜C的反射可以反射到反射镜C左方的反射镜A上,同时当光路三反射镜不处于反射镜A反射光路的正后方时,反射镜A反射来激光经光路四反射镜反射到光路四匀光聚焦镜组上,形成边长2-5mm的光强均匀的方形光斑,加工航空发动机叶盘的叶盆后缘区域和叶盆叶尖区域;
所述光路系统切换到光路二工作是指:当光路一摆臂和光路三摆臂均不处在工作位置,当反射镜E处在出光口A正前方时,激光束A经反射镜E反射,至合束镜,再经合束镜反射出的激光与激光束B均由出光孔B输出,同时当反射镜C和反射镜D分别正处于出光孔A和出光孔B的后方时,B出光孔输出的激光经反射镜D的反射反射到反射镜D正右方的反射镜B上,同时当光路一反射镜不处于反射镜B反射光路的正后方时,反射镜B反射来激光经光路二反射镜反射到光路二匀光聚焦镜组上,形成边长2-5mm的光强均匀的方形光斑,加工航空发动机叶盘的叶背前缘区域和叶背叶尖区域。
对整体叶盘进行激光冲击强化前,先对光路系统的光路三(9)、光路四(10)、光路二(14)和光路一(15)进行校验,确保均能正常工作。
对整体叶盘各个区域加工前,先在待加工区域上粘贴厚度为100μm的、宽度为14mm的黑胶带作为吸收层,对该区域加工完成后,清除其上的黑胶带。
所述激光冲击强化过程中,采用去离子水作为约束层;去离子水的电阻率为18兆,约束层的厚度为1-2mm,且厚度均匀。
激光束A和激光束B为输入波长为1064nm、单脉冲能量为3-20J、脉宽为8-25ns、光束直径<27mm,发散角<3mrad的激光束,所述光路三(9)和光路一(15)输出单脉冲能量6-10J、脉宽15-20ns、光斑直径大小为3mm的圆形激光束。
激光束A和激光束B为输入波长为1064nm、单脉冲能量为3-20J、脉宽为8-25ns、光束直径<27mm,发散角<3mrad的激光束,所述光路四(10)和光路二(14)输出单脉冲能量7-10J、脉宽15-20ns、光斑大小为边长3mm的方形激光束。
所述轨迹机器人的重复定位精度为±0.09mm。所述激光冲击强化的方式采用轨迹机器人移动一下,激光冲击一下的方式进行加工,即逐点进行加工。
所述激光冲击强化中,圆形光斑的搭接率为20%-30%,方形光斑的搭接率为5%-15%。所述整体叶盘的激光冲击强化区域为叶背前缘12mm内的区域,叶背叶尖12mm内的区域,叶背后缘12mm内的区域,叶盆后缘12mm内的区域,叶盆叶尖12mm的区域,叶盆前缘12mm的区域,即叶片周边12mm内的区域范围,叶根区域不进行加工。
所述预定轨迹是指:整体叶盘的激光冲击强化,针对每个前缘和后缘的加工区域,冲击强化的先后次序为:首先在边缘处从叶根方向向叶尖方向加工,然后向叶片内部偏移指定距离再从叶根方向向叶尖方向加工,共往复4次;针对每个叶尖的加工区域,冲击强化的先后次序为:首先在叶尖处从前缘方向向后缘方向加工,然后向叶片内部偏移指定距离再从前缘方向向后缘方向加工,共往复4次;所述指定距离是指按照圆形光斑或方形光斑的搭接率向叶片内部偏移。
所述整体叶盘的激光冲击强化,针对靠近叶片内部的最后一道加工,能量比前3道所用的能量低20%。
本发明有益效果如下:
1、方形光斑和圆形光斑的自动、快速切换,冲击强化加工的效率高。
2、工件的变形量小。
3、叶盘激光冲击强化后,残余压应力可达300MPa以上。
4、激光冲击强化处理后的叶盘高频振动疲劳寿命提高约20~30倍以上。
附图说明
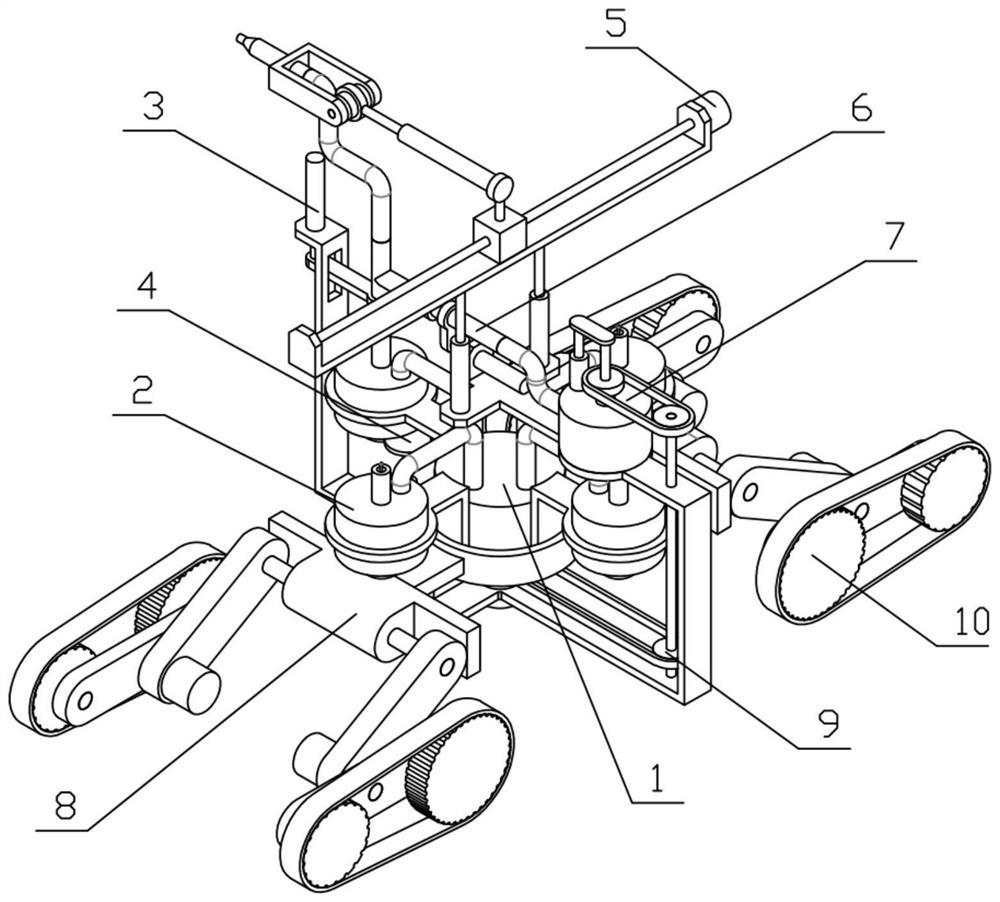
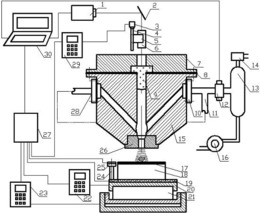
图1为本发明方法所用设备总体方案图;
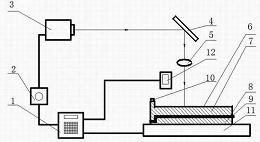
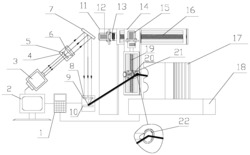
图2为发明方法所用设备布局示意图;
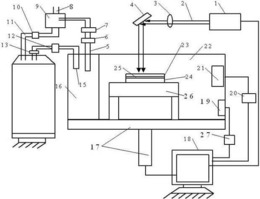
图3为图2中局部放大的送水机器人系统105结构示意图;
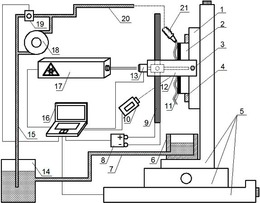
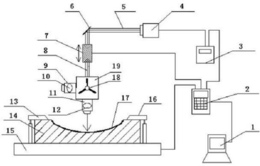
图4为图2中局部放大的光路系统103和激光头109的结构示意图;
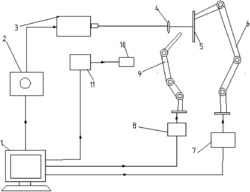
图5为本发明轨迹机器人106的工作示意图;
其中,107为叶盘,111为喷嘴,115为激光束;
图6为所用设备中送水系统101的结构示意图;
图7为所用设备硬件组成示意图;
图8为本发明所用设备的夹具结构示意图;
图9为本发明所用设备中夹具连接法兰的俯视图;
图10为图9的A-A剖视图;
图11为本发明所用设备中夹具锥体支撑件的结构示意图;
图12为本发明所用设备中夹具开口胀圈的结构示意图;
图13为图12的俯视图;
图14为本发明所用设备中夹具等分锥体的俯视图;
图15为图14的A-A剖视图;
图16为本发明所用设备中夹具压盖的结构示意图;
图17为本发明所用设备中夹具异形螺母的结构示意图;
图18为图17的俯视图;
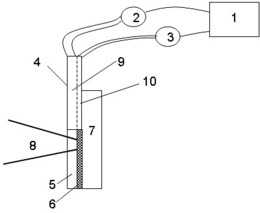
其中:1为异形螺母,2为螺钉,3为连接法兰,4为螺钉,5为锥体支撑件,6为等分锥体,7为开口胀圈,8为叶盘,9为胶垫,10为压盖,11为平垫,12为拉杆,13为销钉,14为连接板,15为锥形销钉;
图19为本发明所用设备中激光头部分的光路系统结构图;
图20为本发明的安装于光路系统中的激光头结构示意图;
图21为本发明中激光头部分光路系统光路示意图;
图22为激光头末端结构示意图;
图23为小反射镜镜座示意图;
其中:102为激光器,515为光学平台,903为导光管A,511为大聚焦镜,905为数控转台,906为摆臂,907为激光头末端,908为导光管,909为连接管,910为连接板,911为配重块,912为小聚焦镜,913为锁定螺钉B,914为小反射镜,915为平头螺钉,916为锁定螺钉A,917为小反射镜镜座,918为出光口;
图24为本发明的设备工作原理图;
图25为本发明的光路系统简图;
图26为本发明的光路系统俯视图;
图27为本发明的光路系统立体图;
图28为光学平台结构简图;
图29为光路传输的激光束效果图;
其中:501为光路一与光路二切换滑台,502为光路二反射镜,503为光路一反射镜,504为光路二匀光聚焦镜组,505为光路一聚焦镜,506为光路一转台,507为光路一小反射镜,508为光路三小反射镜,509为光路三转台,510为光路四匀光聚焦镜组,511为光路三聚焦镜,512为光路四反射镜,513为光路三反射镜,514为光路三与光路四切换滑台,515为光学平台;516为反射镜A,517为出光口滑台,518为反射镜C,102为激光器,520为反射镜E,521为数控滑台,522为反射镜D,523为反射镜B,524为光路二匀光镜片,525为光路二聚焦镜,526为光路三与光路四校验滑台,527为光路三与光路四校验能量计,528为光路一摆臂,529为光路三摆臂,530为光路一与光路二校验能量计,531为光路一与光路二校验滑台,532为光路四聚焦镜,533为光路四匀光镜片,534为防护板,535为防护罩,903为导光管A,537为合束镜。
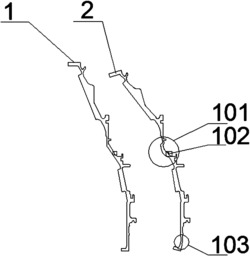
图30是本发明整体叶盘激光冲击强化区域;其中:图(a)为整体叶盘叶片的凸面视图;图(b)为整体叶盘叶片的凹面视图;。
图31是本发明圆形光斑搭接示意图。
图32是本发明方形光斑搭接示意图。
其中:401为叶背前缘区域,402为叶背叶尖区域,403为叶背后缘区域,404为叶盆后缘区域,405为叶盆叶尖区域,406为叶盆前缘区域,409为光路三,410为光路四,414为光路二,415为光路一。
具体实施方式
下面结合附图及实施例详述本发明。
本发明激光冲击强化方法所用一优选的设备如下:
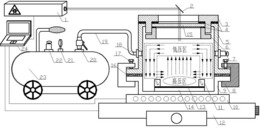
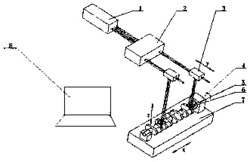
该设备的结构和布局如图2所示,送水系统101与送水机器人系统110连接,实现按照指定方向和大小将水送至叶盘107的加工区域;激光器102发出的激光束,通过安装在激光器102正前方的光路系统103直接传输到叶盘107的加工区域或者通过光路系统103和激光头109传输到叶盘107的加工区域,其中激光器102的出光口与光路系统103的入光口对齐;声压质量监控系统316安装在支架105上并与叶盘107加工区域同高,用于监测叶盘的加工质量;安装在支架105上加工过程监控系统313用于监控设备的运行状态,叶盘107通过夹具108安装在轨迹机器人106手臂末端上,由轨迹机器人带动其运动,激光器102通过激光器控制器113与上位机112连接,送水机器人110和轨迹机器人通过机器人控制器114与上位机连接,所述的送水系统101、激光器102、质量监控系统104、送水机器人110、轨迹机器人106、光路系统103由上位机112统一控制。
如图1-7所示,本发明所用设备包括激光器102、夹持叶盘107沿指定轨迹相对于激光束运动的轨迹机器人106、夹持喷嘴111沿指定轨迹运动将水送至加工区域的送水机器人110、控制水量大小以及自动启停的约束层送水系统(包括送水系统101和送水机器人系统105)、实时在线监测加工质量的声压质量监控系统104、监测和控制设备正常运行的加工过程监控系统313、将激光器102发出的激光束整形并传输至加工位置的光路系统103。
其中:激光器102用于产生脉宽8~25ns的短脉冲、频率0~10Hz、光束直径<27mm、单脉冲能量<25J的激光,经后续的光路系统聚焦,能够产生高峰值功率密度(>109w/cm2)的激光,从而在金属靶材和约束层之间形成等离子体。
将工件(叶盘)固定在轨迹机器人106的末端夹具108上,依靠机器人的带动使工件运动进入加工空间,并且根据强化加工轨迹不断地调整工件的位置和姿态,从而实现工件不同位置的激光冲击强化。同时,在机器人的末端夹具上还实现叶盘的分度旋转运动,从而实现叶盘上不同叶片的激光冲击强化加工。
将喷嘴111安装在送水机器人110末端的法兰上,依靠机器人的带动使喷嘴111运动进入加工空间,并且根据强化加工轨迹不断地调整喷嘴的位置和姿态,从而实现加工区域的水流稳定均匀。
约束层送水系统由水箱624、水泵627、电磁阀618、流量阀311、液位传感器(水位传感器)623、流量传感器(水流传感器)626、集水箱314等组成。通过液位传感器626和电磁阀312监测控制水箱624里的去离子水的储水量,水量不足时自动补水,水量超过设定值时自动关闭电磁阀312停止补水;恒压水泵627从水箱624里将去离子水抽送至流量阀311,保证流量阀311进水口处的压力恒定;通过恒压水泵627调整喷嘴111处的流量大小;通过流量传感器626监测水泵出口处有没有去离子水流通;通过喷嘴111前的电磁阀312控制水流的通断。
声压质量监控系统316通过监测激光冲击的冲击波能量表征激光冲击处理的效果,在叶盘加工过程中,每冲击加工一次都记录相应的数据,为工艺参数的调整提供参考。
加工过程监控系统313对激光冲击的加工过程参数进行实时监测预控,实现送水机器人和轨迹机器人运动实时监测,激光器102运行状态实时监测,实现车间内无人化、远程监控。
光路系统103将激光传输到指定位置,并整形成所需大小形状的光斑,同时可以实现单双面加工任意切换、圆形光斑与方形光斑任意切换。
如图1-5所示,整体叶盘激光冲击强化设备,包括可以输出激光束的激光器102、带动叶盘沿指定轨迹相对于激光束运动的轨迹机器人106、夹持喷头沿指定轨迹运动将水送至加工区域的送水机器人系统104、控制水量大小以及自动启停的约束层送水系统101、实时在线监测加工质量的声压质量监控系统316、监测和控制设备正常运行的加工过程监控系统313、将激光器发出的激光束整形并传输至加工位置的光路系统103。激光器102发出的激光通过光路系统103引到工件的表面,激光器102的出光孔和光路系统的进光孔配合,保证激光束完全垂直进入光路系统103。送水系统101将水送到喷嘴111处,送水机器人110带动喷嘴111,将水喷到工件107的加工位置处,过程监控系统313时刻监测和控制系统的运行状态和运行方式,声压质量监控系统316检测工件的加工质量,并反馈给工控机,来调整工艺参数,使得加工质量达到最优。上述各子系统的紧密配合和软件的协作,组成激光冲击强化设备,实现叶盘的激光冲击强化处理,提高工件的疲劳寿命。
本发明所用设备中的激光器功能如下:
输出激光束的激光器102可以输出波长为532nm、直径为3mm,光强为0.1-2mJ/cm2的引导光,用于观察激光束和光斑的位置,同时可以输出波长1064nm、直径为27mm、单脉冲能量25J、频率为0-5Hz、脉宽为8-25nns的脉冲激光,用于激光冲击强化。
激光器102输出的波长532nm的激光束和波长1064nm的激光束同轴度<0.5mrad。
激光器102的工作方式为单台双路且可单路工作,即激光器有两个出光孔A和B,A出光孔和B出光孔可以同时输出激光,也可以只从B出光孔输出激光。选择A、B出光孔同时出光时,A、B出光孔最大可同时输出波长1064nm、直径为27mm、单脉冲能量12.5J、频率为0-5Hz、脉宽为8-25nns的脉冲激光,同时可以输出波长为532nm、直径为3mm,光强为0.1-2mJ/cm2的引导光;选择只从B出光孔出光时,B出光孔最大可同时输出波长1064nm、直径为27mm、单脉冲能量25J、频率为0-5Hz、脉宽为8-25nns的脉冲激光,同时可以输出波长为532nm、直径为3mm,光强为0.1-2mJ/cm2的引导光。
激光器102的两个出光孔A和B的中心距为231mm,B出光孔的中心距激光器左侧边缘250mm。A和B出光孔在同一水平面上,距地面高度为895mm。
激光器102上A出光孔、B出光孔同时出光或只有B出光孔出光的切换方式:可以手动滑动A出光孔前的45°全反射镜,也可数控滑台驱动A出光孔前的45°全反射镜切入或切出光路实现。
激光器102的尺寸大小为2400mm×1200mm×1300mm。
本发明采用的机器人包括:
轨迹机器人106夹持叶盘107沿指定轨迹相对于激光束运动的。轨迹机器人106为6自由度机器人、型号为RX270,最大负载为250Kg、可达距离为2900mm、重复定位精度为±0.09mm,防护等级为IP65。
送水机器人110夹持喷头沿指定轨迹将水送至加工区域。送水机器人110为6自由度机器人、型号为TX40,最大负载为2Kg、可达距离为500mm、重复定位精度为±0.02mm,防护等级为IP65。
本发明所用设备中送水系统结构及功能如下:
如图6所示,控制水量大小以及自动启停的约束层送水系统将去离子水送至喷嘴111。约束层送水系统由水源615、水阀616、进水管617、进水电磁阀618、溢流口619、溢流管620、球阀A621、排污管622、水位传感器623、储水箱624、球阀B625、水流传感器626、水泵627、流量阀311、电磁阀312、喷嘴111组成。水阀616连接在水源615上,实现水源与进水管617之间的水流的通断,进水电磁阀618安装在进水管617和储水箱624之间,溢流管620安装在溢流口619上,排污管622通过球阀A621连接在储水箱624上,水位传感器623安装在储水箱的底部。球阀B625安装在储水箱624的底部并与水泵627通过水管连接在一起。水流传感器626安装在水泵627的出口端,用水管将水流传感器626出口处的水引到流量阀311上,电磁阀312控制流量阀311出水口的通断,用水管将电磁阀312和喷嘴111连接起来。从而实现将水源615处的水送到喷嘴111处。喷嘴111喷出的水通过集水箱624收集起来,和溢流管620、排污管622出来的水一起送入水处理厂。
通过进水电磁阀617和水位传感器623和工控机相互协作,实现储水箱624自动补水,保证储水箱624里的水量始终保持在储水箱624总容量的30%-80%。同时,由于安装了溢流管620,使得送水系统更加安全可靠。
通过进水流传感器626、恒压水泵627、流量阀311、电磁阀312控制喷嘴111中流量的大小,并能实时控制。
通过约束层送水系统、送水机器人110控制喷嘴111中流量的大小、喷嘴的位置和姿态,使得加工区域叶盘表面的水层厚度为1-2mm,且均匀稳定,连续可调。
本发明所用设备中监控系统结构及功能如下:
声压质量监控系统316对激光冲击强化的加工质量进行实时监测,获得加工效果的数据。声压质量监控系统为3通道声发射传感器、通过连接放大器与工控机(上位机)的数据采集卡连接,工控机内还插有PCI-1780定时计数卡,ET-3000TIL激光探测器固定在激光器的出光口处;定时计数卡保证激光器102和声压质量监控系统316在同一时钟下工作,当激光102器发出激光时,激光探测器探测到激光,探测器发送信号至工控机,工控机开启数据采集卡进行数据采集,将声发射传感器的获得信号存储,工控机对采集的信号进行分析,判断加工质量的好坏。
监测和控制设备正常运行包括:加工过程监控系统313的摄像头与上位机连接,用来监控航空发动机整体叶盘的加工情况;安装在激光器102内部的温度传感器与上位机连接,用来监控激光器是否正常工作;安装在送水机器人110和轨迹机器人106关节处的位置传感器和编码器与上位机连接,用来监控轨迹机器人、送水机器人的位置;安装在光路系统内出光口的光电传感器与上位机连接,用来监控光路系统是否正常工作;送水系统101的压力传感器(水位传感器)与上位机连接,监测储水箱内的水位是否正常,上位机对整个设备实时进行控制,通过数据线将他们联为一个整体。
本发明所用设备的工作原理如下:
如图24所示,上位机的功能主要由机器人运动规划、加工过程仿真、加工过程监控、加工质量监控、工艺数据库和系统协调控制等组成,在上位机的控制下,送水系统产生水流并输送至喷头,送水机器人系统控制水流量的大小、通断,并带动喷头运动将水送至叶盘指定的加工区域,在指定位置形成约束层;轨迹机器人带动装在夹具上的叶盘按照指定加工路径运动;激光器输出激光,传输至光路系统中,从光路系统中出来的激光照射在叶盘加工区域的表面或者经过激光头照射在加工区域的表面;监控系统中的质量监控系统和视频/报警监控系统分别监测叶盘激光冲击强化的质量和系统运行状态。上述系统的协调配合实现整个叶盘的激光冲击强化加工,提高叶盘的疲劳寿命和抗应力腐蚀性能。
光路系统103将激光器发出的激光束整形并传输至加工位置。光路系统103包括数控滑台、数控转台、反射镜、聚焦镜、匀光镜、摆臂组成。从激光器102输出的激光束进入光路系统103,可以从光路系统输出方形光斑或圆形光斑,其中,输出方形光斑的光路有2套组成,且结构上相对称,输出圆形光斑的光路有2套组成,且结构上相对称。4套光路可以根据加工需要,任意切换为其中的一套光路工作,也可以切换为2套相对称的输出方形光斑的光路同时工作。
当选择激光器102的A、B出光孔同时出光时,A、B出光孔输出同时输出波长1064nm、直径为27mm、单脉冲能量0-12.5J、频率为0-5Hz、脉宽为8-25nns的脉冲激光,输出波长为532nm、直径为3mm,光强为0.1-2mJ/cm2的引导光,选择2套相对称的输出方形光斑的光路同时工作时,可在工件表面形成边长约2-4mm的方形光斑。
当选择激光器102只有B出光孔出光时,B出光孔输出输出波长1064nm、直径为27mm、单脉冲能量0-25J、频率为0-5Hz、脉宽为8-25nns的脉冲激光,输出波长为532nm、直径为3mm,光强为0.1-2mJ/cm2的引导光,选择2套相对称的输出方形光斑的光路任意一套光路工作时,可在工件表面形成边长约2-4mm的方形光斑。
当选择激光器102只有B出光孔出光时,B出光孔输出输出波长1064nm、直径为27mm、单脉冲能量0-25J、频率为0-5Hz、脉宽为8-25nns的脉冲激光,输出波长为532nm、直径为3mm,光强为0.1-2mJ/cm2的引导光,选择2套相对称的输出圆形光斑的光路任意一套光路工作时,可在工件表面形成直径约2-4mm的圆形光斑。
激光冲击强化设备可以加尺寸<1000mm×1000mm×400Tm,重量<250Kg的高温合金、钢、铝合金等材料的整体叶盘或结构件。
激光冲击强化设备的软件系统包括机器人运动轨迹规划模块、加工过程仿真模块、加工过程监控模块、加工质量监控模块、工艺数据库管理模块、系统集成模块,保证加工路径最优,最安全、最可靠。
利用该设备对工件加工的过程为:
使用时,首先将整体叶盘107安装在夹具108上;接着将夹具108安装在轨迹机器人106末端的法兰上;接着,在整体叶盘107的待加工区域粘贴一层吸收层,用于吸收激光能量;接着,将选择任意一套光路或2套输出方形光斑的光路处于工作状态;接着,轨迹机器人带着整体叶盘进入加工位置;接着,送水机器人110带着喷头111进入加工位置;接着开启送水系统101,在叶盘加工区域的表面形成一层均匀、稳定、厚度为1-2mm的去离子水;接着,开启激光器102;最后,轨迹机器人106和送水机器人110按照事先制定的轨迹运动,实现航空发动机整体叶盘的激光冲击强化。
夹具的结构具体如下:
如图8-18所示,夹具包括异形螺母1、连接法兰3、锥体支撑件5、等分锥体6、开口胀圈7、胶垫9、压盖10、平垫11、拉杆12、周向定位装置及螺钉2,其中周向定位装置包括销钉13、连接板14和锥形销钉15,销钉13和锥形销钉15分别安装在连接板两端的销孔中,销钉13和锥形销钉15与连接板14之间采用过盈配合,既保证在拆装叶盘8的过程中销钉13、锥形销钉15和连接板14始终为一体,又保证定位可靠。异形螺母1通过螺钉2安装在连接法兰3的一端,锥体支撑件5一端的端面通过螺钉4和销钉定位安装在连接法兰3的另一端。等分锥体6套装在锥体支撑件5的另一端外侧,等分锥体6的下端沿圆周方向均布开设多个豁口,各豁口均沿锥体母线方向开设,使等分锥体6具有弹性。开口胀圈7套装在等分锥体6的外侧,叶盘8套装在开口胀圈7的外侧,叶盘8排气侧的端面与锥体支撑件5一端的端面相配合。胶垫9通过螺钉固定在压盖10上,保证在加紧的过程中对叶盘8无划伤。压盖10设置于等分锥体6的上端。转动叶盘8,将锥形销钉15和销钉13分别插入叶盘8和锥体支撑件5的销孔中;在压盖10的外侧放上平垫11,保证在加紧的过程中对压盖10受力均匀。拉杆12穿过平垫11、压盖10、锥体支撑件5及连接法兰3与异形螺母1螺纹连接。在旋紧拉杆12的过程中,开口胀圈7不断向外膨胀,实现叶盘8轴向定位和径向定位、加紧固定。连接法兰3通过螺钉和定位销实现与机器人法兰盘的连接、定位。
锥体支撑件5和等分锥体6相配合的锥面的锥度为7:24,等分锥体6比锥体支撑件5轴向长4.5mm,加紧后,等分锥体6的下端面距锥体支撑件5一端的端面始终有间隙,锥体支撑件5的另一端与压盖10之间始终有间隙,保证相配合的锥面加紧可靠,叶盘8加紧可靠。
胀圈7采用铜材料,锥体支撑件5和锥形销钉15采用硬铝合金材料,保证对叶盘8无划伤。连接法兰3采用不锈钢材料,保证整体夹具的刚性。
所用夹具的使用方法为:
使用时,首先,将异形螺母1通过螺钉2安装在连接法兰3上,连接法兰3和锥体支撑件5通过销钉和螺钉4安装在一起,胶垫9和压盖10通过螺钉安装在一起,销钉13和锥形销钉15与连接板14安装在一起;接着,将连接法兰3通过螺钉和定位销和机器人法兰盘安装在一起;接着,将等分锥体6套装在锥体支撑件5的外侧;接着,将开口胀圈7套装在等分锥体6的外侧;接着,将叶盘8套装在开口胀圈7的外侧,叶盘8的排气端端面与锥体支撑件5的端面贴合,实现端面定位;接着,旋转叶盘8,将销钉13和销钉15分别安装在叶盘8的定位孔和锥体支撑件5的定位孔内,实现叶盘8周向定位;接着,将平垫11套在拉杆12上,且靠近螺母的一端的光轴上;接着,将拉杆12通过螺纹旋入异形螺母1中;最后,不断的拧紧拉杆12,此时,压盖10不断向叶盘8方向移动,锥体支撑件5和等分锥体6接触面积越来越大,不断驱使开口胀圈7向外膨胀,胀紧叶盘8,实现轴心定位,同时,压盖10通过胶垫9不断压紧在叶盘8的端面上,实现加紧。
当加工完成后,拆卸叶盘8时,旋掉拉杆12,取下平垫11,取下连接在一起的销钉13、连接板14和锥形销钉15,取下压盖10,便可取下叶盘8。
所用夹具通过拉杆对叶盘进行夹紧定位,夹紧定位过程快速简单,拆装叶盘时间不超过2分钟;;能够实现装载最大重量约100kg的整体叶盘;采用销轴、端面和胀芯定位的方法,重复定位精度高,且定位可靠;夹紧定位可靠,极大地提高了叶盘激光冲击强化的质量和生产效率;具有结构简单、质量轻、使用方便、成本低等优点,在提高生产效率的同时,保证了冲击强化质量的均匀性和稳定性;与叶盘接触的部位采用了胶垫、铜和铝合金材料,夹具主体采用不锈钢材料,保证了对叶盘无划伤,夹具在浸在水里的工作情况下不生锈。
激光头结构具体如下:
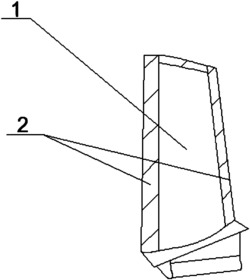
本发明整体叶盘遮蔽部位激光冲击强化用激光头结构如图19-23所示,该激光头包括数控转台905、摆臂906、激光头末端907、大聚焦镜511、小聚焦镜912、小反射镜914及小反射镜镜座917;其中:数控转台905和大聚焦镜511分别通过螺钉和镜架安装在光学平台515上,摆臂906的一端固定安装在数控转台905上,通过手动或自动的方式可以使摆臂906进入工作位和离开工作位;摆臂906的另一端与激光头末端907相连接,小反射镜镜座917固定在激光头末端907的端部,小反射镜914镶嵌在小反射镜镜座917的槽中,激光头末端907的端部侧面上设置出光口918,小聚焦镜912固定在激光头末端907的出光口918处;小反射镜镜座917与出光口918设置的位置使得照射到小反射镜914上的入射光与通过小反射镜914反射出的反射光之间夹角为30-34°。
所述摆臂906由连接板910、连接管909和导光管908组成;其中:连接板910与数控转台905之间通过螺钉固定,连接板910与数控转台905之间通过垫一层胶垫保证摆臂水平;连接板910与连接管909之间通过轴肩定位,并由锁紧螺钉固定;导光管908与连接管909之间通过轴肩定位,并由锁紧螺钉固定;导光管908与连接管909连接前,可事先在连接管909内转动导光管908,调整激光头末端907输出激光的方向,本发明中是通过转动导光管908用来保证出光口处激光水平方向输出,然后再拧紧螺钉进行固定防止转动。
所述摆臂906的导光管908与激光头末端907之间通过轴肩定位,并由锁定螺钉A916紧固。
在数控转台905上通过螺钉安装有配重块911,用于平衡摆臂906的重量,保证数控转台905正常工作,同时为了减轻摆臂906的重量,摆臂906、激光头末端907和小反射镜镜座917均采用铝合金材料,配重块911采用不锈钢材料,在保证重量的同时,防止在潮湿空气中生锈。数控转台(905)与电机同轴连接,电机由上位机(112)控制,电机的编码器与上位机(112)连接。
所述小反射镜镜座917通过M3的平头螺钉915固定在激光头末端907的尾部;其中:小反射镜镜座917采用沉头孔结构设计;拧紧平头螺钉915之前,在平头螺钉915螺纹处、小反射镜镜座917与激光头末端907的尾部的结合面处涂一层紫外固化胶,拧紧螺钉后,放入紫外固化箱中固化30s,对结合面进行密封,防止激光冲击强化加工过程中,有水进入激光头内部损坏镜片。
大小为10mm×9mm×2mm的小反射镜914镶嵌在小反射镜镜座917上大小为10mm×9mm×2mm的槽中。其中,小反射镜:镀高反射膜,反射膜R>99.81064nm,损伤阈值为脉冲25J/cm2、10ns、2Hz;入射角为α=16±2°,波长532nm及1064nm激光在其上的反射率均可达到99.5%以上。
小聚焦镜912通过锁定螺钉B913固定在激光头的末端907的出光口918处,采用轴肩定位的方式进行定位;其中:拧紧锁定螺钉B913之前,在锁定螺钉B913螺纹处、小聚焦镜912边缘与激光头末端907出光口918处的结合面处涂一层紫外固化胶,拧紧锁定螺钉B913后,放入紫外固化箱中固化30s,对结合面进行密封,防止激光冲击强化加工过程中,有水进入激光头内部损坏镜片;小聚焦镜912的镜片损伤阈值:脉冲25J/cm2、10ns、2Hz,波长532nm及1064nm激光在其上的透射率均可达到99.5%以上。
大聚焦镜511通过镜架固定在光学平台515上。其中:用于将大聚焦镜511固定在光学平台515上的镜架其装调机构均采用4维调整机构,具有锁紧功能,可以实现两个方向的水平移动及两个方向的转动,从而能够调整激光束正好垂直从大聚焦镜的中心穿过;大聚焦镜511的镜片损伤阈值:脉冲25J/cm2、10ns、2Hz,波长532nm及1064nm激光在其上的透射率均可达到99.5%以上。
小聚焦镜912的直径为10mm,焦距为10mm,厚度为7mm。
大聚焦镜511的直径为50mm,焦距为1300mm,厚度为4mm。
摆臂906安装在数控转台905上,通过自动控制或手动的方式控制数控转台在90°范围内转动,激光头可以切入工作位和离开工作位。
激光头末端907端部的大小为23×21×19mm,保证其在叶片间运动自如,和叶片无碰撞。
当有光束直径<27mm、波长为1064nm、发散角<3mrad、脉宽8-25ns、频率0-5Hz的激光束进入激光头,在距激光头出光孔2mm处形成直径大小约为3mm、平顶分布的圆形光斑。
上述激光头在使用时,首先通过自动控制或手动控制的方式使数控转台905旋转工作,将摆臂906和激光头末端907进入工作位,即让激光头进入工作位置。当有光束直径<27mm、波长为1064nm、发散角<3mrad的激光束垂直入射到直径为50mm、焦距为1300mm的大聚焦镜上时,大聚焦镜将光束聚焦到大小为10mm×9mm×2mm的小反射镜上,通过小反射镜的反射,将激光束进入直径为10mm、焦距为10mm的小聚焦镜中,通过小聚焦镜将光束聚焦在叶片表面,叶片距镜片外表面为2mm,在叶片表面形成直径大小约为3mm、平顶分布的圆形光斑。从而实现对整体叶盘遮蔽部位的激光冲击冲击强化。
上述激光头能够对航空发动机整体叶盘遮蔽部位进行激光冲击强化,解决了航空发动机整体叶盘遮蔽部位不能被加工的难题;结构小巧,安全可靠,加工位置调整方便;输出的激光束均匀,保证了加工质量的均匀可靠;使用方便、加工效率高。
所用设备的整体光路系统的结构具体如下:
如图25-29所示,整体叶盘单/双面激光冲击强化光路系统包括:安装在光学平台515上的光路一与光路二切换滑台501、光路三与光路四切换滑台514以及出光口滑台517;安装在激光器102内部用于光路切换的数控滑台521;安装在光学平台515上的光路三转台509和光路一转台506;安装在光学平台515上的光路三与光路四校验滑台526和光路一与光路二校验滑台531;安装在光学平台515上的光路二反射镜502、光路四反射镜512、反射镜A516和反射镜B523;安装在光学平台515上的光路一聚焦镜505、光路三聚焦镜511、光路二聚焦镜525和光路四聚焦镜532,安装在光学平台515上的光路二匀光镜片524和光路四匀光镜片533,所述光路二聚焦镜525和光路二匀光镜片524组成光路二匀光聚焦镜组504,所述光路四聚焦镜532和光路四匀光镜片533组成光路四匀光聚焦镜组510;分别安装在光路一转台506和光路三转台509上的光路一摆臂528和光路三摆臂529;分别安装在光路一摆臂528末端和光路三摆臂529末端的光路一小反射镜507和光路三小反射镜508;分别安装在光路一与光路二切换滑台501和光路三与光路四切换滑台514上的光路一反射镜503和光路三反射镜513;安装在出光口滑台517上的反射镜C518和反射镜D522;安装在数控滑台521上的反射镜E520;安装在激光器102内部的合束镜537;分别安装在光路三与光路四校验滑台526和光路一与光路二校验滑台531上的光路三与光路四校验能量计527和光路一与光路二校验能量计530;安装在光学平台515上的防护板534、防护罩535和导光管A903。数控滑台的电机由上位机进行控制。
所述防护板534是用于防止加工过程中的水溅射到光路三与光路四校验能量计527、光路一与光路二校验能量计530、光路三与光路四校验滑台526和光路一与光路二校验滑台531上;所述防护罩535和导光管A903是用来防止车间内的灰尘污染光路系统里的光学镜片。
所述反射镜E520在伺服电机的驱动下或手动旋转伺服电机后端的旋钮,能够在数控滑台521上滑动;激光器上设置出光口A和出光口B;当反射镜E520处在出光口A正前方时,激光束A经反射镜E520反射至合束镜537,再经合束镜537反射出的激光与激光束B均由出光孔B输出;当反射镜E520处在出光口A和出光口B之间的位置时,激光束A和激光束B分别从出光口A和出光口B输出。
所述反射镜C518和反射镜D522在伺服电机的驱动下或手动旋转伺服电机后端的旋钮,能够同时在出光口滑台517上滑动;A出光口和B出光孔同时出光时,当反射镜C518和反射镜D522分别正处于出光孔A和出光孔B的正后方时,A出光孔输出的激光经反射镜C518的反射能够反射到反射镜C518左方的反射镜A516上,B出光孔输出的激光经反射镜D522的反射能够反射到反射镜D522右方的反射镜B523上;只有B出光孔出光时,当反射镜C518和反射镜D522分别正处于出光孔A和出光孔B的后方时,B出光孔输出的激光经反射镜D522的反射可以反射到反射镜D522右方的反射镜B523上;只有B出光孔出光时,当只有反射镜C518正处于出光孔B的后方时,B出光孔输出的激光经反射镜C518的反射可以反射到反射镜C518左方的反射镜A516上。
所述光路一反射镜503在伺服电机的驱动下或手动旋转伺服电机后端的旋钮,能够在光路一与光路二切换滑台501上滑动;当反射镜B523上有激光束反射出来时,光路一反射镜3正处于反射镜B523反射光路的正后方时,反射镜B523反射来激光经光路一反射镜503反射到光路一反射镜503左方的光路501聚焦镜505上;当反射镜B523上有激光束反射出来时,光路一反射镜503不处于反射镜B523反射光路的正后方时,反射镜B523反射来激光经光路二反射镜502反射到光路二反射镜502左方的光路二匀光聚焦镜组504上。
所述光路三反射镜513在伺服电机的驱动下或手动旋转伺服电机后端的旋钮,能够在光路三与光路四切换滑台514上滑动;当反射镜A516上有激光束反射出来时,光路三反射镜513正处于反射镜A516反射光路的正后方时,反射镜A516反射来的激光经光路三反射镜513反射到光路三反射镜513右方的光路三聚焦镜511上;当反射镜A516上有激光束反射出来时,光路三反射镜513不处于反射镜A516反射光路的正后方时,反射镜A516反射来的激光经光路四反射镜512反射到光路四反射镜512右方的光路四匀光聚焦镜组510上。
所述光路一摆臂528在伺服电机的驱动下或手动旋转伺服电机旁的旋钮,能够围绕光路一转台506的轴线转动;当光路一聚焦镜505有激光输出时,光路一摆臂528摆至光路一小反射镜507正好处于光路一聚焦镜505输出光路的正左方时,光路一小反射镜507将经光路一聚焦镜505输出的激光反射到工件表面,形成直径为2-5mm的光强均匀的圆形光斑;当不需光路一工作时,光路一摆臂528顺时针旋转至光学平台上。
所述光路三摆臂529在伺服电机的驱动下或手动旋转伺服电机旁的旋钮,能够围绕光路三转台509的轴线转动;当光路三聚焦镜511有激光输出时,光路三摆臂529摆至光路三小反射镜508正好处于光路三聚焦镜511输出光路的正右方时,光路三小反射镜508将经光路三聚焦镜511输出的激光反射到工件表面,形成直径为2-5mm的光强均匀的圆形光斑;当不需光路三工作时,光路三摆臂529逆时针旋转至光学平台上。
当光路二匀光聚焦镜组504有激光束输入时,光路二聚焦镜525输出的激光照射到工件表面,形成边长为2-5mm的光强均匀的方形光斑。
当光路四匀光聚焦镜组510有激光束输入时,光路四聚焦镜532输出的激光照射到工件表面,形成边长为2-5mm的光强均匀的方形光斑。
所述光路一与光路二校验能量计530在伺服电机的驱动下或手动旋转伺服电机后端的旋钮,能够在光路一与光路二校验滑台531上滑动;光路一摆臂528和光路三摆臂529均处于不工作状态,校验光路一的完好性时,光路一与光路二校验能量计530移动到光路一聚焦镜505的正后方,选择从光路一中输出激光,测量光路一输出的能量,与激光器输出的能量做对比;校验光路二的完好性时,光路一与光路二校验能量计530移动到光路二聚焦镜525的正后方,选择从光路二中输出激光,测量光路二输出的能量,与激光器输出的能量做对比;当对工件进行冲击强化加工时,光路一与光路二校验能量计530移动到不遮挡光路的地方。
所述光路三与光路四校验能量计527在伺服电机的驱动下或手动旋转伺服电机后端的旋钮,能够在光路三与光路四校验滑台526上滑动;光路一摆臂528和光路三摆臂529均处于不工作状态,校验光路三的完好性时,光路三与光路四校验能量计502移动到光路三聚焦镜511的正后方,选择从光路三中输出激光,测量光路三输出的能量,与激光器输出的能量做对比;校验光路四的完好性时,光路三与光路四校验能量计527移动到光路四聚焦镜532的正后方,选择从光路四中输出激光,测量光路四输出的能量,与激光器输出的能量做对比;当对工件进行冲击强化加工时,光路一与光路二校验能量计527移动到不遮挡光路的地方。
当只由出光口B出光时,当输入波长为1064nm、单脉冲能量为3-20J、脉宽为8-25ns、光束直径<27mm,发散角<3mrad的激光束时,光路一415或光路三409能够输出激光光斑直径为2-5mm的光强均匀的圆形光斑;当只由出光口B出光时,当输入波长为1064nm、单脉冲能量为3-20J、脉宽为8-25ns、光束直径<27mm,发散角<3mrad的激光束时,光路二414或光路四410能够输出激光光斑为边长2-5mm的光强均匀的方形光斑。
当出光口A和出光口B同时出光时,当输入波长为1064nm、单脉冲能量为3-20J、脉宽为8-25ns、光束直径<27mm,发散角<3mrad的激光束时,光路一415和光路三409能够输出激光光斑直径为2-5mm的光强均匀的圆形光斑;当出光口A和出光口B同时出光时,当输入波长为1064nm、单脉冲能量为3-20J、脉宽为8-25ns、光束直径<27mm,发散角<3mrad的激光束时,光路二414和光路四410能够输出激光光斑为边长2-5mm的光强均匀的方形光斑。
当输入波长为1064nm、单脉冲能量为3-20J、脉宽为8-25ns、光束直径<27mm,发散角<3mrad的激光束时,光路一和光路三的能量损失<6%;当输入波长为1064nm、单脉冲能量为3-20J、脉宽为8-25ns、光束直径<27mm,发散角<3mrad的激光束时,光路二和光路四的能量损失<10%。
本发明的光路系统结构简单,使用方面,在提高生产效率的同时,保证了激光冲击强化质量的均匀性和稳定性;设计的四套光路,可以根据需要,任意选择一套光路或者两套光路工作,可以适应多种结构形状的工件加工;提供的方形光斑对于加工平面等结构简单的工件,尤为适用,在方便路径规划的同时,能够保证加工质量均匀稳定,同时效率较高;提供的圆形光斑对于加工结构复杂、被工件其他部位遮挡的加工区域尤为适用,使得难加工、不能加工的区域变得能够被加工;提供的光路校验,能够快速有效的检查光路的完好性,能够快速的诊断光路系统运行是否正常;提供的防护板、防护罩、导光管能够有效的防止水、灰尘污染能量计和镜片,从而保证了设备长期稳定的运行。
利用上述设备对航空发动机整体叶盘进行激光冲击强化的方法为:该方法首先将整体叶盘通过夹具安装在轨迹机器人末端的法兰盘上,然后将光路系统依次设定为光路三409工作、光路一415工作、光路四410工作、光路二414工作、光路四410工作和光路二414工作,依次分别对整体叶盘叶片的叶背后缘区域403、叶盆前缘区域406、叶盆后缘区域404、叶背前缘区域401、叶盆叶尖区域405和叶背叶尖区域402进行激光冲击强化。该方法具体步骤如下:
(1)上料和贴吸收层:在上料位(上料位是指将整体叶盘安装到轨迹机器人及其在加工区域粘贴及清除吸收层的位置)将整体叶盘107通过夹具安装在轨迹机器人106末端的法兰盘上,在叶背后缘区域403粘贴厚度为100μm的、宽度为14mm的黑胶带作为吸收层;
(2)进入加工准备点P0和切换到光路三409:轨迹机器人106带着叶盘107运动到加工准备点P0,光路系统103切换到光路三409工作;
(3)进入叶背后缘403聚焦加工位置:轨迹机器人106带着叶盘107运动到叶背后缘403聚焦加工位置,这是由于聚焦光路摆臂结构复杂,将激光头逐步进入到叶片之间,到达叶背后缘403聚焦加工位置;
(4)叶背后缘403聚焦加工:从叶背后缘403的叶根处开始按照预定轨迹逐点向叶尖方向加工,加工完一个叶片后,自动切换到下一叶片进行加工,直至加工完成为止;
(5)回到加工准备点P0和光路三409回原位:轨迹机器人106带着叶盘107运动到加工准备点P0,光路系统103的光路三409回到原位;
(6)轨迹机器人回到上料位贴吸收层:将轨迹机器人106运动到上料位,将叶背后缘区域403残余的黑胶带用丙酮棉球擦除干净,在叶盆前缘区域406粘贴厚度为100μm的、宽度为14mm的黑胶带作为吸收层;
(7)进入加工准备点P0和切换到光路一415:轨迹机器人106带着叶盘107运动到加工准备点P0,光路系统103切换到光路一415工作;
(8)进入叶盆前缘406聚焦加工位置:轨迹机器人106带着叶盘107运动到叶盆前缘406聚焦加工位置,这是由于聚焦光路摆臂结构复杂,将激光头逐步进入到叶片之间,到达叶盆前缘406聚焦加工位置;
(9)叶盆前缘406聚焦加工:从叶盆前缘406的叶根处开始按照预定轨迹逐点向叶尖方向加工,加工完一个叶片后,自动切换到下一叶片进行加工,直至加工完成为止;
(10)回到加工准备点P0和光路一415回原位:轨迹机器人106带着叶盘107运动到加工准备点P0,光路系统103的光路一415回到原位;
(11)轨迹机器人回到上料位贴吸收层:将轨迹机器人106运动到上料位,将叶盆前缘406残余的黑胶带用丙酮棉球擦除干净,在叶盆后缘区域404粘贴厚度为100μm的、宽度为14mm的黑胶带作为吸收层;
(12)进入加工准备点P0和切换到光路四410:轨迹机器人106带着叶盘107运动到加工准备点P0,光路系统103切换到光路四410工作;
(13)进入叶盆后缘404匀光加工位置:轨迹机器人106带着叶盘107运动到叶盆后缘404匀光加工位置;
(14)叶盆后缘404匀光加工:从叶盆后缘404的叶根处开始按照预定轨迹逐点向叶尖方向加工,加工完一个叶片后,自动切换到下一叶片进行加工,直至加工完成为止;
(15)回到加工准备点P0和光路四410回原位:轨迹机器人106带着叶盘107运动到加工准备点P0,光路系统103的光路四410回到原位;
(16)轨迹机器人回到上料位贴吸收层:将轨迹机器人106运动到上料位,将叶盆后缘404残余的黑胶带用丙酮棉球擦除干净,在叶背前缘区域401粘贴厚度为100μm的、宽度为14mm的黑胶带作为吸收层;
(17)进入加工准备点P0和切换到光路二414:轨迹机器人106带着叶盘107运动到加工准备点P0,光路系统103切换到光路二414工作;
(18)进入叶背前缘401匀光加工位置:轨迹机器人106带着叶盘107运动到叶背前缘401匀光加工位置;
(19)叶背前缘401匀光加工:从叶背前缘401的叶根处开始按照预定轨迹逐点向叶尖方向加工,加工完一个叶片后,自动切换到下一叶片进行加工,直至加工完成为止;
(20)回到加工准备点P0和光路二414回原位:轨迹机器人106带着叶盘107运动到加工准备点P0,光路系统103的光路二414回到原位;
(21)轨迹机器人回到上料位贴吸收层:将轨迹机器人106运动到上料位,将叶背前缘401残余的黑胶带用丙酮棉球擦除干净,在叶盆叶尖区域405粘贴厚度为100μm的、宽度为14mm的黑胶带作为吸收层;
(22)进入加工准备点P0和切换到光路四410:轨迹机器人106带着叶盘107运动到加工准备点P0,光路系统103切换到光路四410工作;
(23)进入叶盆叶尖405匀光加工位置:轨迹机器人106带着叶盘107运动到叶盆叶尖405匀光加工位置;
(24)叶盆叶尖405匀光加工:从叶盆叶尖405的叶根处开始按照预定轨迹逐点向叶尖方向加工,加工完一个叶片后,自动切换到下一叶片进行加工,直至加工完成为止;
(25)回到加工准备点P0和光路四410回原位:轨迹机器人106带着叶盘107运动到加工准备点P0,光路系统103的光路四410回到原位;
(26)轨迹机器人回到上料位贴吸收层:将轨迹机器人106运动到上料位,将叶盆叶尖405残余的黑胶带用丙酮棉球擦除干净,在叶背叶尖区域402粘贴厚度为100μm的、宽度为14mm的黑胶带作为吸收层;
(27)进入加工准备点P0和切换到光路二414:轨迹机器人106带着叶盘107运动到加工准备点P0,光路系统103切换到光路二414工作;
(28)进入叶背叶尖402匀光加工位置:轨迹机器人106带着叶盘107运动到叶背叶尖402匀光加工位置;
(29)叶背叶尖402匀光加工:从叶背叶尖402的叶根处开始按照预定轨迹逐点向叶尖方向加工,加工完一个叶片后,自动切换到下一叶片进行加工,直至加工完成为止;
(30)回到加工准备点P0和光路二414回原位:轨迹机器人106带着叶盘107运动到加工准备点P0,光路系统103的光路二414回到
一种整体叶盘激光冲击强化方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。









动态评分
0.0