









专利摘要
本实用新型提供一种织布机用快速启动或制动的切换电路,包括电源电路、高压控制电路、制动器离合器控制电路及单片机;所述电源电路包括变压器、多个整流电路、多个滤波电路和一稳压电路;单片机的输出端输出KZGY、KZXC、KZZDQ、KZLHQ信号;高压控制电路为制动器离合器控制电路提供100V直流高压,制动器离合器控制电路接收来自单片机的KZXC、KZZDQ、KZLHQ信号,并接收来自高压控制电路的GYOUT信号;制动器离合器控制电路包括消磁回路、用于控制制动器运行的制动器控制回路和用于控制离合器运行的离合器控制回路;本实用新型可以实现织布机启动速度快,点动灵敏的作用,能够提升织布质量和织布效率。
权利要求
1.一种织布机用快速启动或制动的切换电路,其特征在于,包括电源电路、高压控制电路、制动器离合器控制电路及单片机;
所述电源电路包括变压器、多个整流电路、多个滤波电路和一稳压电路;所述变压器的一次绕组端为380V交流电,其二次绕组端分别100V交流电、24V交流电、9V交流电、14V交流电;多个所述整流电路和滤波电路分别用于将通过交流100V、24V、9V、14V整流、滤波得到直流100V、24V、9V及12V的直流电源,所述12V直流电源通过稳压电路得到5V的直流电源供制动器离合器控制电路使用;
所述单片机的输出端输出KZGY、KZXC、KZZDQ、KZLHQ信号,其中,所述KZGY信号为单片机输出用于控制高压输出的脉冲信号;所述KZXC信号为单片机输出的用于控制消磁的脉冲信号;所述KZZDQ信号为单片机输出的用于控制制动器的脉冲信号;所述KZLHQ信号为单片机输出的用于控制离合器的脉冲信号;
所述高压控制电路接收来自单片机的KZGY信号并将100V的高压经二极管D5输出到GYOUT节点,为制动器离合器控制电路提供100V直流高压,供制动器离合器控制电路使用;所述高压控制电路包括光耦PH01、光耦PH02、时基集成电路NE555、三极管BG1和场效应管Q1;所述光耦PH01、光耦PHO2均电连接单片机的KZGY信号输出端;
所述制动器离合器控制电路接收来自单片机的KZXC、KZZDQ、KZLHQ信号,并接收来自高压控制电路的GYOUT信号;所述制动器离合器控制电路包括消磁回路、用于控制制动器运行的制动器控制回路和用于控制离合器运行的离合器控制回路;所述消磁回路的输入端接收来自单片机的KZXC信号,所述消磁回路包括光耦PH03、三极管BG2和继电器JK1;所述光耦PH03的一端电连接5V直流电和单片机的KZXC信号输出端;所述制动器控制回路包括光耦PH05、场效应管Q2和制动器;所述光耦PH05的一端电连接单片机的KZZDQ信号输出端;所述离合器回路包括光耦PH04、场效应管Q3和离合器,所述光耦PH04的一端电连接单片机的KZLHQ信号输出端。
2.根据权利要求1所述一种织布机用快速启动或制动的切换电路,其特征在于,多个所述整流电路分别为100V整流电路、24V整流电路、9V整流电路、14V整流电路;所述100V整流电路由四个整流二极管6A10构成;所述24V整流电路由四个整流二极管6A10构成;所述9V整流电路由四个整流二极管IN4007构成;所述9V整流电路采用整流桥芯片GBU1010。
3.根据权利要求1所述一种织布机用快速启动或制动的切换电路,其特征在于,所述稳压电路采用三端稳压集成电路芯片7812。
4.根据权利要求1所述一种织布机用快速启动或制动的切换电路,其特征在于,所述光耦PH01、光耦PH02、光耦PH03、光耦PH04、光耦PH05均采用光电耦合器PC817。
5.根据权利要求1所述一种织布机用快速启动或制动的切换电路,其特征在于,所述三极管BG1、三极管BG2采用NPN型晶体三极管8050。
6.根据权利要求1所述一种织布机用快速启动或制动的切换电路,其特征在于,所述场效应管Q1、场效应管Q2、场效应管Q3采用IRFP460。
7.根据权利要求1所述一种织布机用快速启动或制动的切换电路,其特征在于,所述继电器JK1采用HH52P-12VDC。
说明书
技术领域
本实用新型属于织布机控制技术领域,涉及一种织布机的控制电路,具体涉及一种织布机用快速启动或制动的切换电路。
背景技术
在织布机控制系统中,制动器、离合器控制电路的常规保护电路就是在制动器、离合器的2端反接二极管和1个电阻组成的释放电流电路。虽然该电路具有很好的电路保护功能,但是由于目前制动器、离合器生产中使用的材料具有剩磁,造成不能及时脱开的情况。
在实际运行中,经常出现启动速度慢,点动不灵敏等现象,严重影响了织布质量,甚至启动时,离合器吸合马达运转,但由于制动器的剩磁依然刹车,使皮带断裂的情况。
实用新型内容
本实用新型要解决的技术问题是提供一种织布机用快速启动或制动的切换电路,该切换电路具有消磁制动器剩磁、启动速度快、点动灵敏的功能,以解决背景技术中所提出的问题。
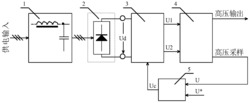
为解决上述技术问题,本实用新型的实施例提供一种织布机用快速启动或制动的切换电路,其特征在于,所述切换电路包括电源电路、高压控制电路、制动器离合器控制电路及单片机;
所述电源电路包括变压器、多个整流电路、多个滤波电路和一稳压电路;所述变压器的一次绕组端为380V交流电,其二次绕组端分别100V交流电、24V交流电、9V交流电、14V交流电;多个所述整流电路和滤波电路分别用于将通过交流100V、24V、9V、14V整流、滤波得到直流100V、24V、9V及12V的直流电源,所述12V直流电源通过稳压电路得到5V的直流电源供制动器离合器控制电路使用;
所述单片机的输出端输出KZGY、KZXC、KZZDQ、KZLHQ信号,其中,所述KZGY信号为单片机输出用于控制高压输出的脉冲信号;所述KZXC信号为单片机输出的用于控制消磁的脉冲信号;所述KZZDQ信号为单片机输出的用于控制制动器的脉冲信号;所述KZLHQ信号为单片机输出的用于控制离合器的脉冲信号;
所述高压控制电路接收来自单片机的KZGY信号并将100V的高压经二极管D5输出到GYOUT节点,为制动器离合器控制电路提供100V直流高压,供制动器离合器控制电路使用;所述高压控制电路包括光耦PH01、光耦PH02、时基集成电路NE555、三极管BG1和场效应管Q1;所述光耦PH01、光耦PHO2均电连接单片机的KZGY信号输出端;
所述制动器离合器控制电路接收来自单片机的KZXC、KZZDQ、KZLHQ信号,并接收来自高压控制电路的GYOUT信号;所述制动器离合器控制电路包括消磁回路、用于控制制动器运行的制动器控制回路和用于控制离合器运行的离合器控制回路;所述消磁回路的输入端接收来自单片机的KZXC信号,所述消磁回路包括光耦PH03、三极管BG2和继电器JK1;所述光耦PH03的一端电连接5V直流电和单片机的KZXC信号输出端;所述制动器控制回路包括光耦PH05、场效应管Q2和制动器;所述光耦PH05的一端电连接单片机的KZZDQ信号输出端;所述离合器回路包括光耦PH04、场效应管Q3和离合器,所述光耦PH04的一端电连接单片机的KZLHQ信号输出端。
进一步的,多个所述整流电路分别为100V整流电路、24V整流电路、9V整流电路、14V整流电路;所述100V整流电路由四个整流二极管6A10构成;所述24V整流电路由四个整流二极管6A10构成;所述9V整流电路由四个整流二极管IN4007构成;所述9V整流电路采用整流桥芯片GBU1010。
进一步的,所述稳压电路采用三端稳压集成电路芯片7812。
进一步的,所述光耦PH01、光耦PH02、光耦PH03、光耦PH04、光耦PH05均采用光电耦合器PC817。
进一步的,所述三极管BG1、三极管BG2采用NPN型晶体三极管8050。
进一步的,所述场效应管Q1、场效应管Q2、场效应管Q3采用IRFP460。
进一步的,所述继电器JK1采用HH52P-12VDC。
本实用新型的有益效果在于:
(1)本实用新型的单片机输出KZGY、KZXC、KZZDQ、KZLHQ信号;电源电路提供高压控制电路及制动器离合器控制电路所需100V、24V、9V、12V直流电。
(2)本实用新型的高压控制电路在单片机的控制下可为制动器离合器控制电路提供瞬间100V直流高压。
(3)本发明的制动器离合器控制电路中包括消磁回路、制动器控制回路和离合器控制回路;消磁回路在接收到单片机KZXC信号为低电平时,继电器JK1吸合,24V直流电瞬间反向加到制动器线包,制动器立即释放,实现反向放电消磁;消除了制动器中的剩磁,防止在织布机启动时,离合器吸合马达运转情况下,制动器因剩磁而依然刹车的情况出现,从而减少皮带断裂的现象出现,延长马达、皮带、制动器、离合器的寿命。同时,在离合器或制动器需要工作时,高压控制电路在接收到单片机的KZGY低电平脉冲时,提供100V高压直流电,当100V高压直流电瞬间叠加在离合器或制动器的一端,使得离合器或制动器立即动作,从而实现织布机启动速度快,点动灵敏的作用,能够提升织布质量和织布效率。
(4)本发明的高压控制电路中采用时基集成电路NE555,在高压控制电路非工作状态时,NE555输出低电平,BG1不通;当需要高压控制电路工作时,单片机输出的KZGY信号输出为低电平脉冲,NE555输出高电平脉冲,BG1通,提供9V直流电,通过NE555的控制,可实现控制提供9V直流电的时间,从而避免单片机损坏时,高压一直加在离合器、制动器上,造成损坏的情况。
附图说明
图1为本实用新型的一种织布机用快速启动或制动的切换电路中电源电路的电路图;
图2为本实用新型的一种织布机用快速启动或制动的切换电路中高压控制电路的电路图;
图3为本实用新型的一种织布机用快速启动或制动的切换电路中制动器离合器控制电路的电路图;
图4为本发明的一种用于控制织布机离合器和制动器的切换电路及其工作方法中织布机正常运行时的流程图;
图5为本发明的一种用于控制织布机离合器和制动器的切换电路及其工作方法中织布机停机时的流程图;
图6为本发明的一种用于控制织布机离合器和制动器的切换电路及其工作方法中织布机点动运行时的流程图。
具体实施方式
为使本实用新型要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。
如图1、图2和图3所示,一种织布机用快速启动或制动的切换电路,包括电源电路、高压控制电路、制动器离合器控制电路及单片机。
所述电源电路包括变压器、多个整流电路、多个滤波电路和一稳压电路;所述变压器的一次绕组端为380V交流电,其二次绕组端分别100V交流电、24V交流电、9V交流电、14V交流电;多个所述整流电路和滤波电路分别用于将通过交流100V、24V、9V、14V整流、滤波得到直流100V、24V、9V及12V的直流电源,所述12V直流电源通过稳压电路得到5V的直流电源供制动器离合器控制电路使用。具体的,多个所述整流电路分别为100V整流电路、24V整流电路、9V整流电路、14V整流电路;所述100V整流电路由四个整流二极管6A10构成;所述24V整流电路由四个整流二极管6A10构成;所述9V整流电路由四个整流二极管IN4007构成;所述9V整流电路采用整流桥芯片GBU1010。多个所述滤波电路分别与100V整流电路、24V整流电路、9V整流电路、14V整流电路和稳压电路并联,采用滤波器或滤波器与电容器组成,所述稳压电路采用三端稳压集成电路芯片7812;详见图1。
所述单片机的KZGY、KZXC、KZZDQ、KZLHQ输出端分别输出KZGY、KZXC、KZZDQ、KZLHQ信号,其中,所述KZGY信号为单片机输出用于控制高压输出的脉冲信号;所述KZXC信号为单片机输出的用于控制消磁的脉冲信号;所述KZZDQ信号为单片机输出的用于控制制动器的脉冲信号;所述KZLHQ信号为单片机输出的用于控制离合器的脉冲信号。
所述高压控制电路接收来自单片机的KZGY信号并将100V的高压经二极管D5输出到GYOUT节点,为制动器离合器控制电路提供100V直流高压,供制动器离合器控制电路使用;所述高压控制电路包括光耦PH01、光耦PH02、时基集成电路NE555、三极管BG1和场效应管Q1;所述光耦PH01、光耦PHO2均电连接单片机的KZGY信号输出端;详见图2。
所述制动器离合器控制电路接收来自单片机的KZXC、KZZDQ、KZLHQ信号,并接收来自高压控制电路的GYOUT信号;所述制动器离合器控制电路包括消磁回路、用于控制制动器运行的制动器控制回路和用于控制离合器运行的离合器控制回路;所述消磁回路的输入端接收来自单片机的KZXC信号,所述消磁回路包括光耦PH03、三极管BG2和继电器JK1;所述光耦PH03的一端电连接5V直流电和单片机的KZXC信号输出端;所述制动器控制回路包括光耦PH05、场效应管Q2和制动器;所述光耦PH05的一端电连接单片机的KZZDQ信号输出端;所述离合器回路包括光耦PH04、场效应管Q3和离合器,所述光耦PH04的一端电连接单片机的KZLHQ信号输出端;详见图3。
进一步的实施例中,所述光耦PH01、光耦PH02、光耦PH03、光耦PH04、光耦PH05均采用光电耦合器PC817。
进一步的实施例中,所述三极管BG1、三极管BG2采用NPN型晶体三极管8050。
进一步的实施例中,所述场效应管Q1、场效应管Q2、场效应管Q3采用IRFP460。
进一步的实施例中,所述继电器JK1采用HH52P-12VDC。
本实用新型的一种织布机用快速启动或制动的切换电路的工作过程,包括以下步骤:
S1、电源电路功能实现:变压器将外部输入的380V交流电转换为100V交流电、24V交流电、9V交流电、14V交流电;后分别经多个整流电路整流和多个滤波电路滤波后得到100V直流电、24V直流电、9V直流电、14V直流电,其中,14V直流电经稳压电路稳压后输出供制动器离合器控制电路使用的12V直流电。
S2、高压控制电路功能实现:高压控制电路非工作状态时,单片机输出的KZGY信号输出为高电平;当需要高压控制电路工作时,单片机输出的KZGY信号输出为低电平脉冲,分别控制光耦PH01、光耦PH02导通;通过光耦PH02控制NE555产生几十毫秒的高电平,三极管BG1导通,将9V电源提供给光耦PH01,光耦PH01导通,9V电源通过R10控制Q1导通,将100V的高压通过二极管D5输出到GYOUT节点,供制动器离合器控制电路使用。
如图3所示,织布机运行时的流程图所示;织布机先进行消磁再进行离合器动作。
S3、消磁功能实现:当单片机输出的KZZDQ信号为高电平,制动器释放,同时,KZXC输出20ms低电平,继电器JK1吸合,24V直流电瞬间反向加到制动器线包,制动器立即释放,实现瞬间消磁;
S4、离合器功能实现:消磁功能实现后,单片机输出的KZXC信号为高电平,继电器JK1释放,24V直流电通过常闭触点提供给离合器的一端;然后,单片机输出的KZLHQ为低电平;同时,KZGY节点输出低电平脉冲(低电平脉冲的脉冲宽度可调节,范围在1ms-180ms),产生瞬间高压,叠加给离合器的同一端;当单片机输出的KZLHQ为低电平,光耦PH04、场效应管Q3导通,离合器得电,由于瞬间加了高压,制动器完全释放,织布机立即动作。
在更进一步的实施例中,如图6所示,当织布机需要点动时,点动过程中,该步骤中KZLHQ信号为短时低电平,低电平时长为1ms-500ms可调,根据需要控制点动移动距离,便于调试。
在更进一步的实施例中,当织布机需要正常运行时,正常运行过程中,该步骤中KZLHQ信号一直保持低电平,直至停止。
S5、制动器功能实现:如图5所示,当织布机需要停车时,单片机输出的KZLHQ信号为高电平,离合器失电释放,单片机的KZXC信号为高电平,继电器JK1不动作,24V直流电通过常闭触点提供给制动器的一端;同时,单片机的KZGY节点输出低电平脉冲(低电平脉冲的脉冲宽度可调节,范围在1ms-180ms),产生瞬间高压,也叠加给制动器的同一端;同时,单片机输出的KZZDQ信号为低电平,光耦PH05导通,场效应管Q2导通,制动器得电,制动器立即吸合刹车。
以上所述是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
一种织布机用快速启动或制动的切换电路专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。








动态评分
0.0