








专利摘要
本实用新型提供一种双轨交通变轨系统,包括:双轨道梁和自动驾驶车辆,双轨道梁分为上轨和下轨,上轨分为低空段、高空段,下轨设置在转弯段,上轨下轨都包括两条平行的行驶轨,两条行驶轨之间设置垂直的连接件,各段侧面垂向设置多个立柱,自动驾驶车辆包括在上轨下方的车体,车体上表面固定连接上部走行轮、导向轮、变轨走行轮、变轨导向轮和伸缩机构,车体下表面固定连接下部走行轮,本实用新型车辆经过道岔变轨时,直行或转向通过采用上部走行轮与低空行驶轨分离、变轨走行轮或下部走行轮分别与轨道接触的方式,避免出现轨道梁中断而车辆走行轮悬空的现象,防止发生车辆颠簸,具有车辆通行效率高、稳定性好,乘客舒适的优点。
权利要求
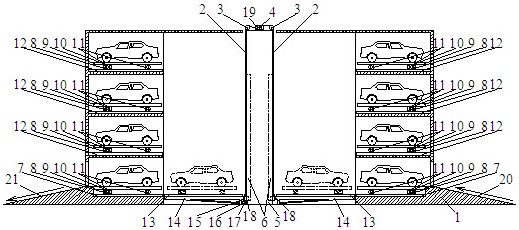
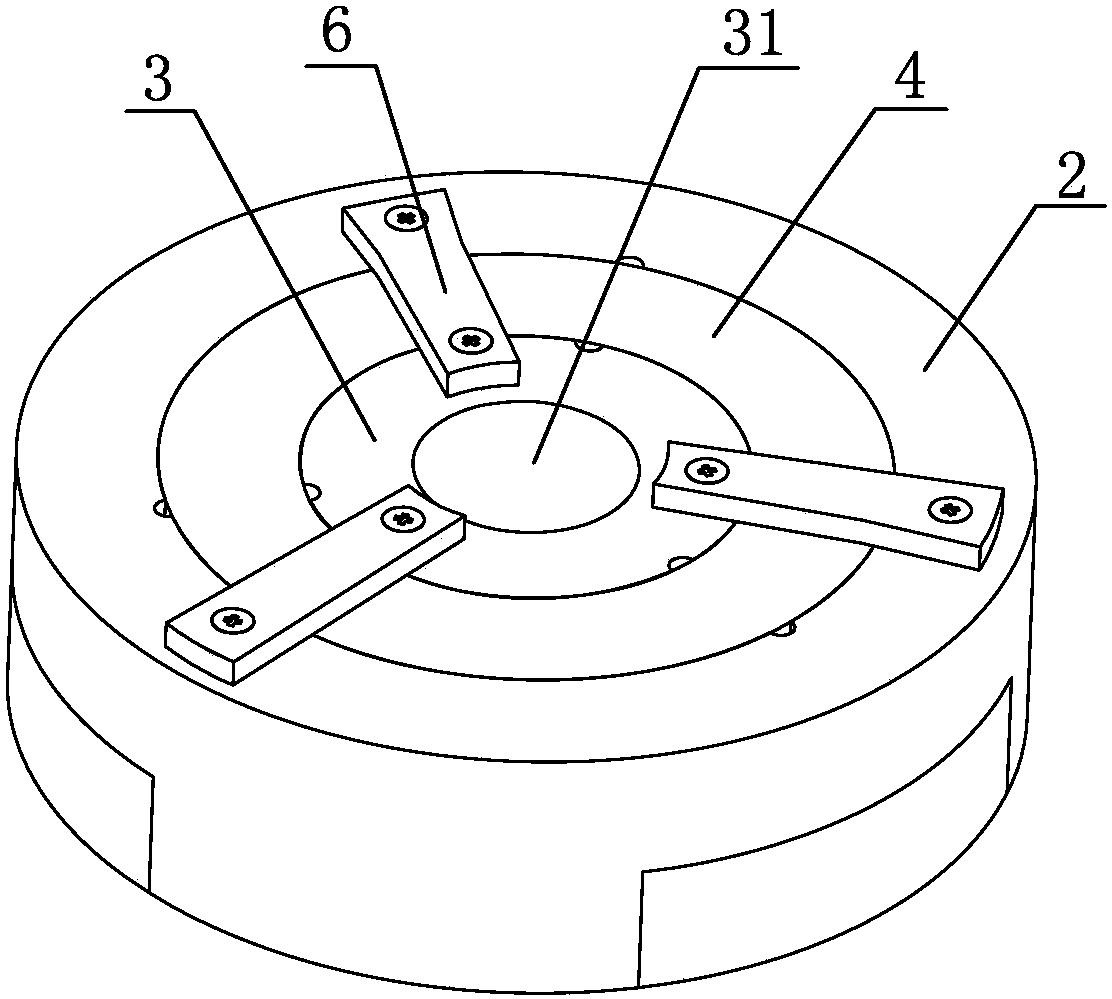
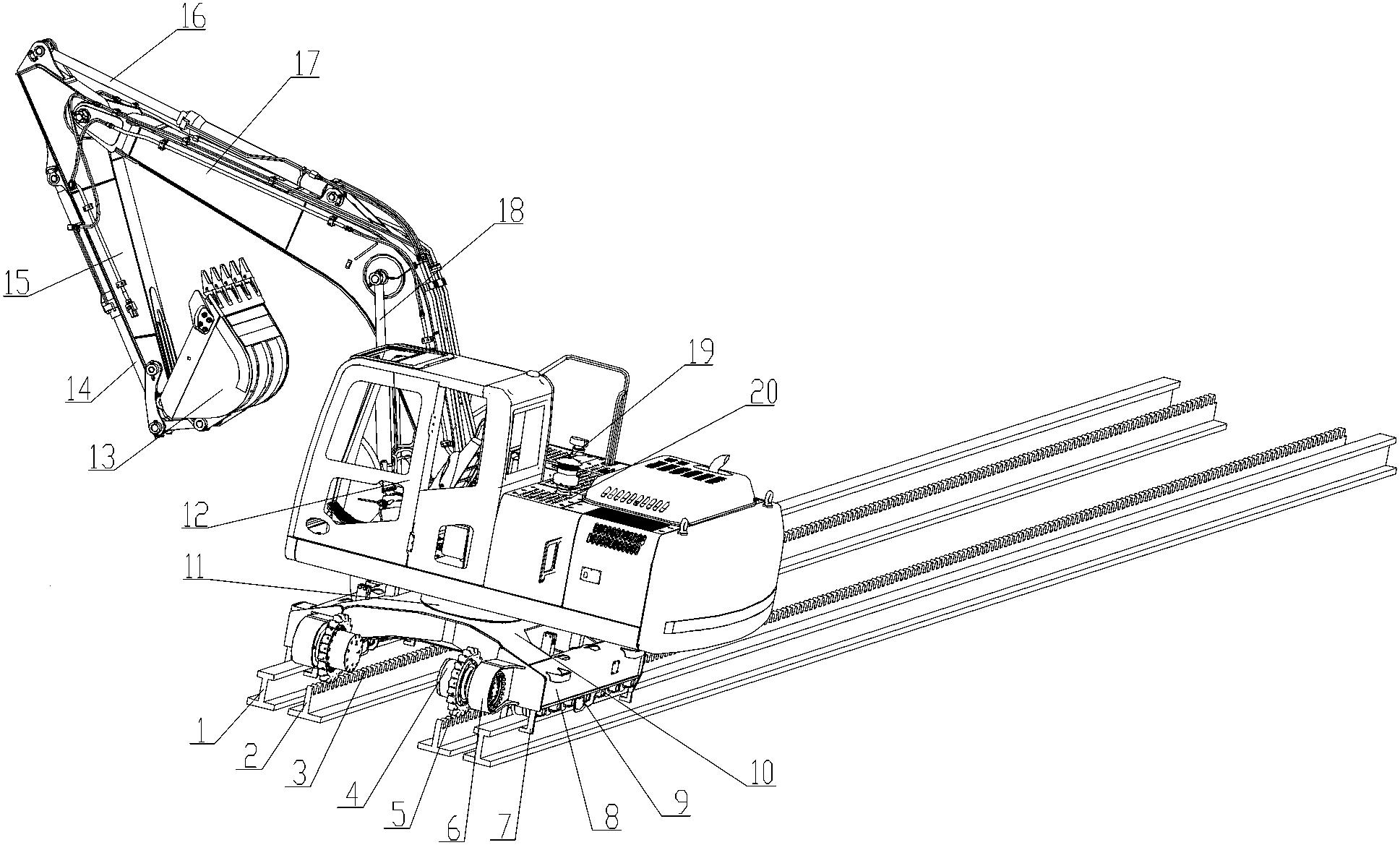
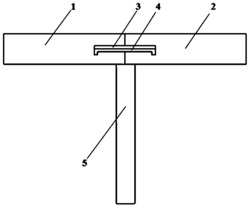
1.一种双轨交通变轨系统,其特征在于,包括:双轨道梁和自动驾驶车辆,所述双轨道梁分为上轨和下轨,上轨分为低空段、高空段,下轨设置在转弯段,上轨下轨都包括两条平行的行驶轨,两条行驶轨之间设置垂直的连接件(2),各段侧面垂向设置多个立柱(3),连接件(2)与立柱(3)固定连接;高空段的高空行驶轨(11)高于低空段的低空行驶轨(1);
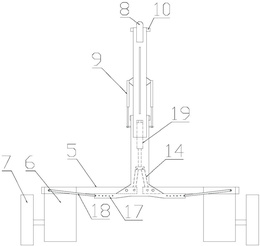
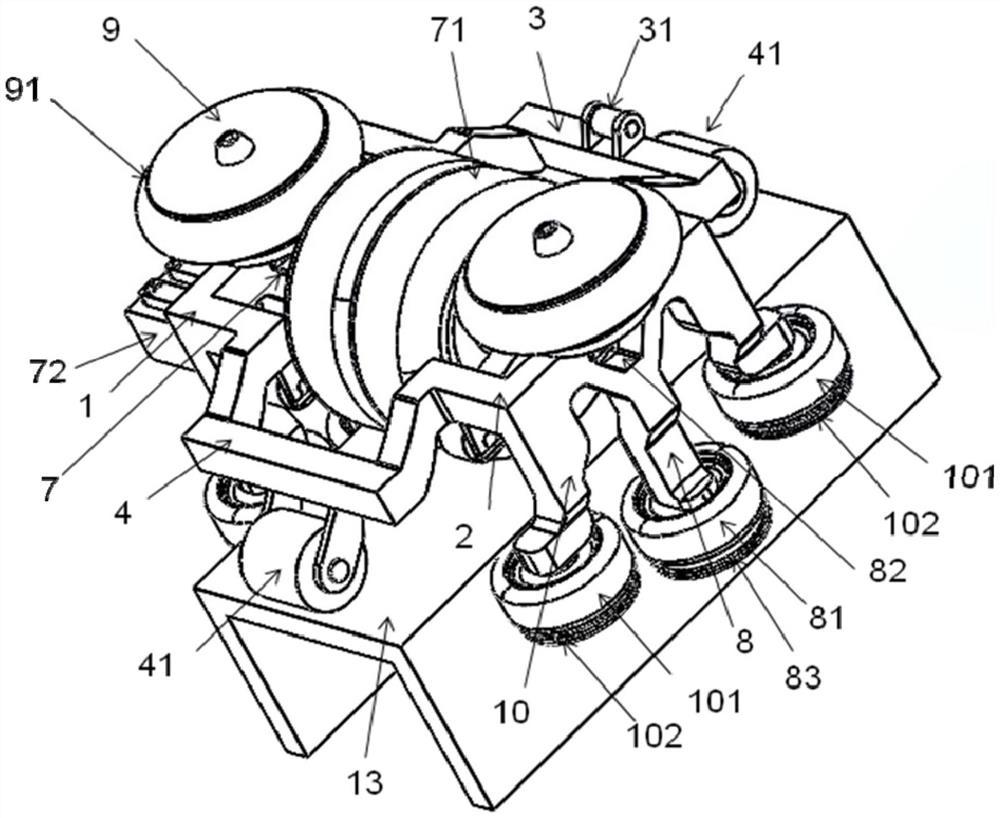
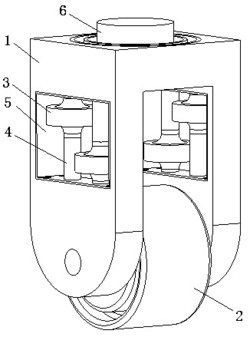
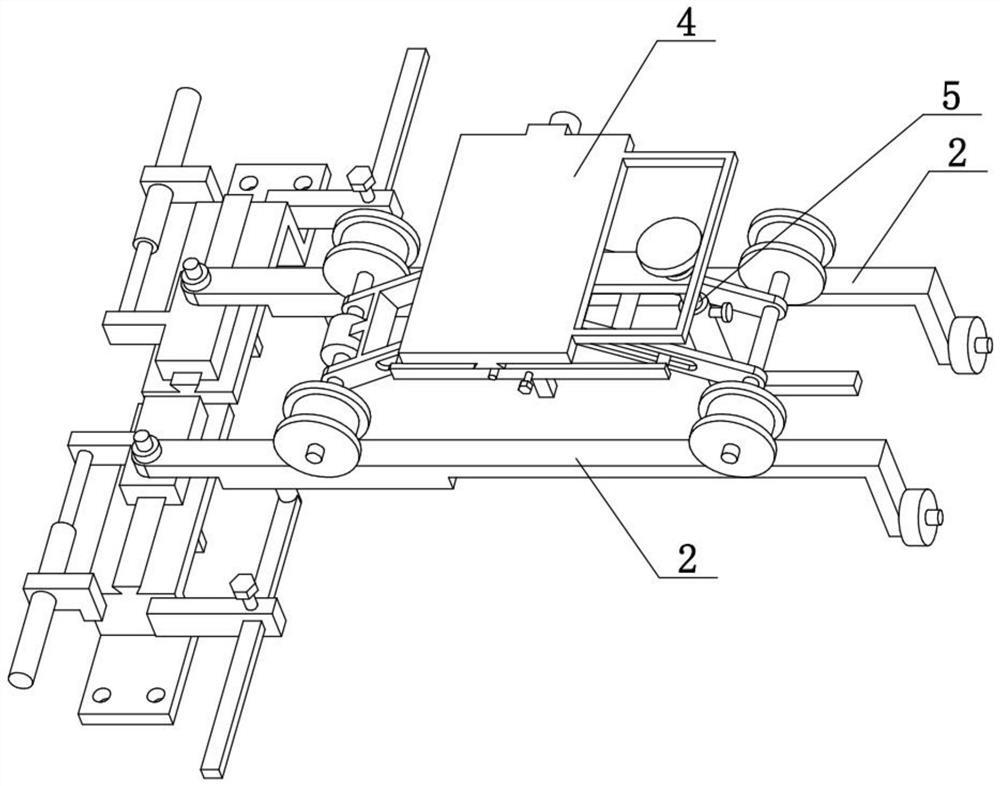
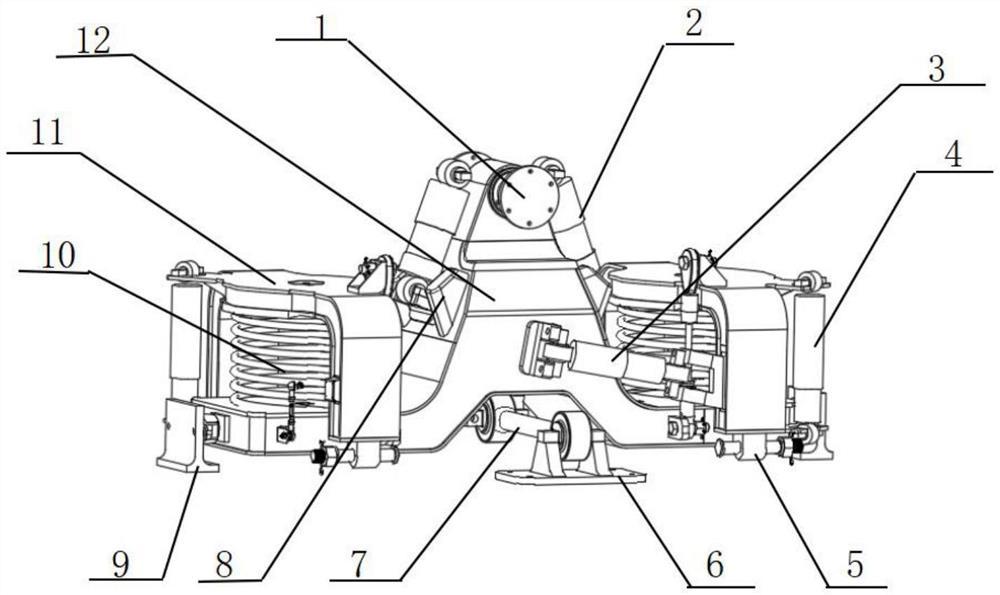
自动驾驶车辆包括在上轨下方的车体(4),车体(4)上表面固定连接上部走行轮(5)、导向轮(6)、变轨走行轮(9)、变轨导向轮(10)和伸缩机构(8),车体(4)下表面固定连接下部走行轮(7),上部走行轮(5)、变轨走行轮(9)和下部走行轮(7)都受动力驱动,上部走行轮(5)位于导向轮(6)上方,变轨走行轮(9)位于变轨导向轮(10)上方;
车辆行走在低空段时,上部走行轮(5)的轮底与低空行驶轨(1)的上表面接触,导向轮(6)的侧面和低空行驶轨(1)的侧面接触;导向轮(6)的上表面和低空行驶轨(1)的底面存在间隙;
车辆行走在高空段时,伸缩机构(8)带动变轨走行轮(9)及变轨导向轮(10)向上移动,使变轨走行轮(9)的轮底与高空段行驶轨(11)的上表面接触,变轨导向轮(10)的侧面和高空段行驶轨(11)的侧面接触;变轨导向轮(10)的上表面和高空段行驶轨(11)的底面存在间隙;上部走行轮(5)和导向轮(6)与低空行驶轨(1)脱离;
车辆行走在转弯段时,下部走行轮(7)的轮底与下部行驶轨(12)上表面接触,上部走行轮(5)和导向轮(6)与低空行驶轨(1)脱离。
2.根据权利要求1所述的双轨交通变轨系统,其特征在于:高空段和低空段之间的行驶轨设有过渡段,车辆准备直行通过过渡段进入高空段前,上部走行轮(5)的轮底与低空行驶轨(1)的上表面接触,导向轮(6)的侧面和低空行驶轨(1)的侧面接触;导向轮(6)的上表面和低空行驶轨(1)的底面存在间隙,同时,伸缩机构(8)带动变轨走行轮(9)及变轨导向轮(10)向上移动,使变轨走行轮(9)的轮底与高空段行驶轨(11)的上表面具有相同高度,直到两者相互接触。
3.根据权利要求2所述的双轨交通变轨系统,其特征在于:过渡段距离高空行驶轨(11)前方10-15米。
4.根据权利要求1所述的双轨交通变轨系统,其特征在于:车体(4)上表面固定连接四个上部走行轮(5)、四个导向轮(6)、四个变轨走行轮(9)、四个变轨导向轮(10),所述走行轮(5)、导向轮(6)、变轨走行轮(9)、变轨导向轮(10)都关于行驶轨中轴线左右对称。
5.根据权利要求1所述的双轨交通变轨系统,其特征在于:四个下部走行轮(7)固定在车体(4)下部,四个下部走行轮(7)都关于行驶轨中轴线左右对称。
6.根据权利要求1所述的双轨交通变轨系统,其特征在于:下部走行轮(7)与行驶轨的接触面是锥形。
7.根据权利要求1所述的双轨交通变轨系统,其特征在于:两条行驶轨之间等间距设置多个连接件(2),双轨道梁通过连接件(2)固定在立柱(3)上。
说明书
技术领域
本实用新型涉及交通运输系统领域,尤其是一种双轨道空中交通的变轨系统。
背景技术
现有城市空中轨道交通系统主要采用下部开口的箱型单轨梁结构,车辆悬挂于轨道梁下方行驶,变轨系统采用两种方式,一种是道岔设置动作轨,具有道岔动作慢,影响车辆通行效率的问题;另一种是车辆走行部设置转向轮,具有走行部结构复杂,车辆稳定性差,乘客体验不佳的问题。
实用新型内容
为了解决现有技术中存在的上述问题,本实用新型提供了一种双轨道空中交通的变轨系统,具有结构简单,造价低,变轨过程中车辆行驶稳定,道岔区域车辆通行效率高的优点。
为实现上述实用新型目的,本实用新型技术方案如下:
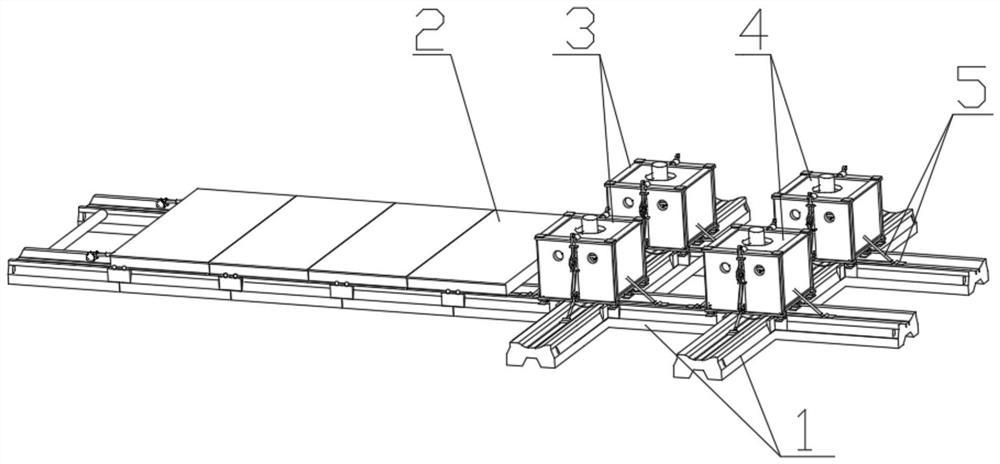
一种双轨交通变轨系统,包括:双轨道梁和自动驾驶车辆,所述双轨道梁分为上轨和下轨,上轨分为低空段、高空段,下轨设置在转弯段,上轨、下轨都包括两条平行的行驶轨,两条行驶轨之间设置垂直的连接件2,各段侧面垂向设置多个立柱3,连接件2与立柱3固定连接;高空段的高空行驶轨11高于低空段的低空行驶轨1;
自动驾驶车辆包括在上轨下方的车体4,车体4上表面固定连接上部走行轮5、导向轮6、变轨走行轮9、变轨导向轮10和伸缩机构8,车体4下表面固定连接下部走行轮7,上部走行轮5、变轨走行轮9和下部走行轮7都受动力驱动,上部走行轮5位于导向轮6上方,变轨走行轮9位于变轨导向轮10上方;
车辆行走在低空段时,上部走行轮5的轮底与低空行驶轨1的上表面接触,导向轮6的侧面和低空行驶轨1的侧面接触;导向轮6的上表面和低空行驶轨1的底面存在间隙,车辆发生侧翻时起到限位作用;
车辆行走在高空段时,伸缩机构8带动变轨走行轮9及变轨导向轮10向上移动,使变轨走行轮9的轮底与高空段行驶轨11的上表面接触,变轨导向轮10的侧面和高空段行驶轨11的侧面接触;变轨导向轮10的上表面和高空段行驶轨11的底面存在间隙,车辆发生侧翻时起到限位作用;上部走行轮5和导向轮6与低空行驶轨1脱离;
车辆行走在转弯段时,下部走行轮7的轮底与下部行驶轨12上表面接触,上部走行轮5和导向轮6与低空行驶轨1脱离。
作为优选方式,高空段和低空段之间的行驶轨设有过渡段,车辆准备直行通过过渡段进入高空段前,上部走行轮5的轮底与低空行驶轨1的上表面接触,导向轮6的侧面和低空行驶轨1的侧面接触;导向轮6的上表面和低空行驶轨1的底面存在间隙,车辆发生侧翻时起到限位作用。同时,伸缩机构8带动变轨走行轮9及变轨导向轮10向上移动,使变轨走行轮9的轮底与高空段行驶轨11的上表面具有相同高度,直到两者相互接触。
作为优选方式,过渡段距离高空行驶轨11前方10-15米。
作为优选方式,车体4上表面固定连接四个上部走行轮5、四个导向轮6、四个变轨走行轮9、四个变轨导向轮10,所述走行轮5、导向轮6、变轨走行轮9、变轨导向轮10都关于行驶轨中轴线左右对称。
作为优选方式,四个下部走行轮7固定在车体4下部,四个下部走行轮7都关于行驶轨中轴线左右对称。
作为优选方式,下部走行轮7与行驶轨的接触面是锥形。
作为优选方式,两条行驶轨之间等间距设置多个连接件2,双轨道梁通过连接件2固定在立柱3上。
本实用新型的工作原理为:车辆行走在低空段时上部走行轮5的轮底与低空行驶轨1的上表面接触,导向轮6的侧面和低空行驶轨1的侧面接触;导向轮6的上表面和低空行驶轨1的底面存在间隙,车辆发生侧翻时起到限位作用;车辆行走在高空段时,伸缩机构8带动变轨走行轮9及变轨导向轮10向上移动,使变轨走行轮9的轮底与高空段行驶轨11的上表面接触,变轨导向轮10的侧面和高空段行驶轨11的侧面接触;变轨导向轮10的上表面和高空段行驶轨11的底面存在间隙,车辆发生侧翻时起到限位作用;上部走行轮5和导向轮6与低空行驶轨1脱离;车辆行走在转弯段时,下部走行轮7的轮底与下部行驶轨12上表面接触,上部走行轮5和导向轮6与低空行驶轨1脱离。高空段和低空段之间的行驶轨设有过渡段,车辆准备直行通过过渡段进入高空段前,上部走行轮5的轮底与低空行驶轨1的上表面接触,导向轮6的侧面和低空行驶轨1的侧面接触;导向轮6的上表面和低空行驶轨1的底面存在间隙,同时,伸缩机构8带动变轨走行轮9及变轨导向轮10向上移动,使变轨走行轮9的轮底与高空段行驶轨11的上表面具有相同高度,直到两者相互接触。
通过采用上述技术方案,本实用新型取得了以下有益效果:车辆经过道岔变轨时,直行或转向通过采用上部走行轮与低空行驶轨分离、变轨走行轮或下部走行轮分别与轨道接触的方式,避免出现轨道梁中断而车辆走行轮悬空的现象,防止发生车辆颠簸,具有车辆通行效率高、稳定性好,乘客舒适的优点。
附图说明
图1为本实用新型自动驾驶车辆行驶在低空段上的示意图;
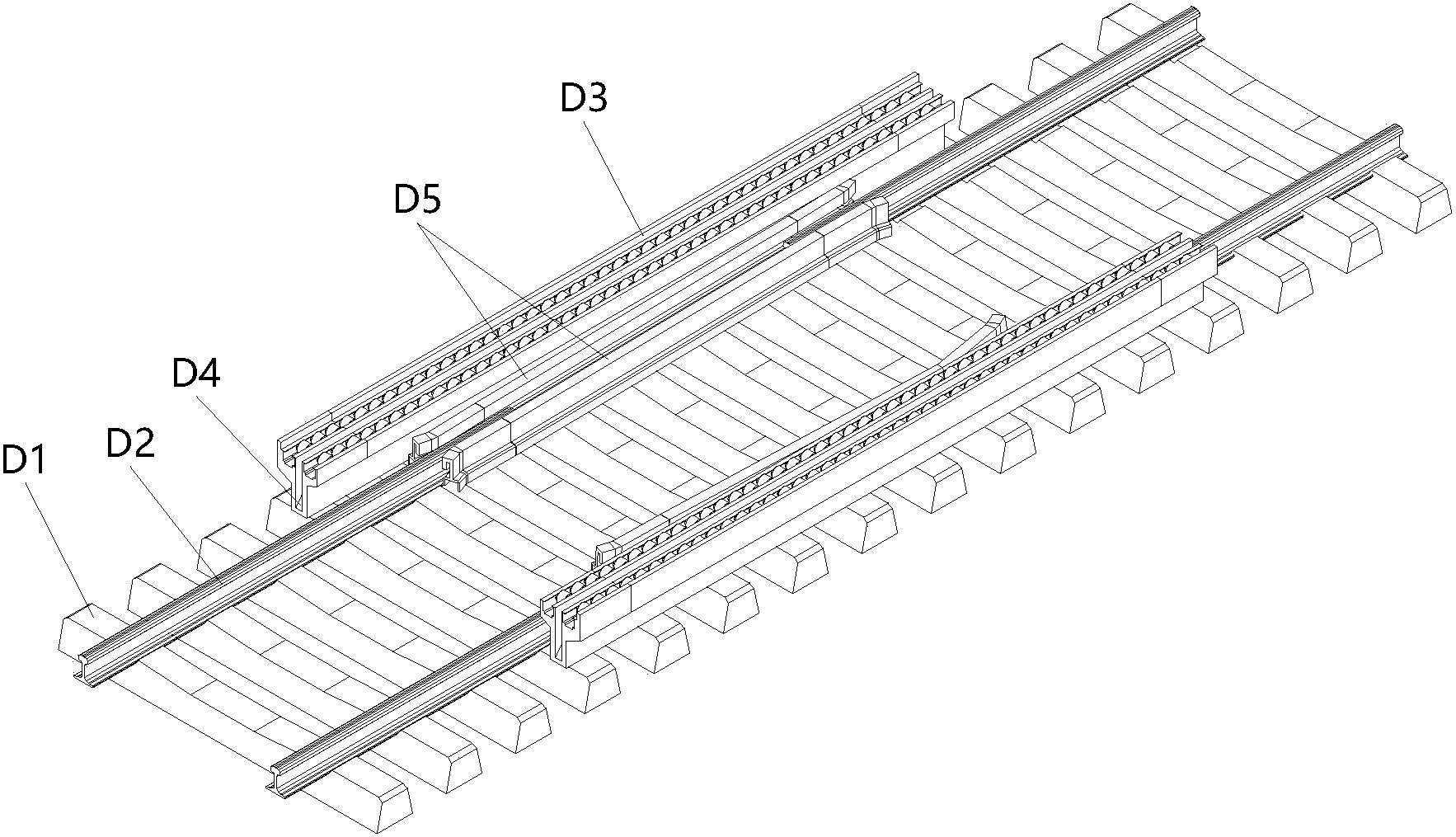
图2为本实用新型双轨道梁示意图;
图3为自动驾驶车辆直行通过过渡段的示意图;
图4为自动驾驶车辆直行通过高空段中的示意图;
图5为自动驾驶车辆变轨通过过渡区的示意图;
图6为自动驾驶车辆变轨通过道岔中的示意图;
图7为导线轮和变轨导向轮的示意图。
1为低空行驶轨,2为连接件,3为立柱,4为车体,5为上部走行轮,6为导向轮,7为下部走行轮,8为伸缩机构,9为变轨走行轮,10为变轨导向轮,11为高空行驶轨,12为下部行驶轨,13为转弯段。
具体实施方式
以下通过特定的具体实例说明本实用新型的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本实用新型的其他优点与功效。本实用新型还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本实用新型的精神下进行各种修饰或改变。
一种双轨交通变轨系统,包括:双轨道梁和自动驾驶车辆,所述双轨道梁分为上轨和下轨,上轨分为低空段、高空段,下轨设置在转弯段,上轨下轨都包括两条平行的行驶轨,两条行驶轨之间等间距设置多个垂直的连接件2,各段侧面垂向设置多个立柱3,连接件2与立柱3固定连接;双轨道梁通过连接件2固定在立柱3上。高空段的高空行驶轨11高于低空段的低空行驶轨1;
自动驾驶车辆包括在上轨下方的车体4,车体4上表面固定连接四个上部走行轮5、四个导向轮6、四个变轨走行轮9、四个变轨导向轮10和伸缩机构8,所述走行轮5、导向轮6、变轨走行轮9、变轨导向轮10都关于行驶轨中轴线左右对称。车体4下表面固定连接四个下部走行轮7,四个下部走行轮7都关于行驶轨中轴线左右对称。上部走行轮5、变轨走行轮9和下部走行轮7都受动力驱动,上部走行轮5位于导向轮6上方,变轨走行轮9位于变轨导向轮10上方;
车辆行走在低空段时上部走行轮5的轮底与低空行驶轨1的上表面接触,导向轮6的侧面和低空行驶轨1的侧面接触;导向轮6的上表面和低空行驶轨1的底面存在间隙,车辆发生侧翻时起到限位作用;
车辆行走在高空段时伸缩机构8带动变轨走行轮9及变轨导向轮10向上移动,使变轨走行轮9的轮底与高空段行驶轨11的上表面接触,变轨导向轮10的侧面和高空段行驶轨11的侧面接触;变轨导向轮10的上表面和高空段行驶轨11的底面存在间隙,车辆发生侧翻时起到限位作用;
车辆行走在转弯段时,下部走行轮7的轮底与下部行驶轨12上表面接触,上部走行轮5和导向轮6与低空行驶轨1脱离。
高空段和低空段之间的行驶轨设有过渡段,车辆行走在过渡段时,上部走行轮5的轮底与低空行驶轨1的上表面接触,导向轮6的侧面和低空行驶轨1的侧面接触;导向轮6的上表面和低空行驶轨1的底面存在间隙,车辆发生侧翻时起到限位作用。同时,伸缩机构8带动变轨走行轮9及变轨导向轮10向上移动,使变轨走行轮9的轮底与高空段行驶轨11的上表面具有相同高度,直到两者相互接触。过渡段距离高空行驶轨11前方10-15米。
下部走行轮7与行驶轨的接触面是锥形。因此下部走行轮7具有导向作用。进入道岔后,使车辆顺利通过弯道,上部走行轮5和导向轮6逐渐与低空行驶轨1配合完成变轨。
上述实施例仅例示性说明本实用新型的原理及其功效,而非用于限制本实用新型。任何熟悉此技术的人士皆可在不违背本实用新型的精神及范畴下,对上述实施例进行修饰或改变。因此,凡所属技术领域中具有通常知识者在未脱离本实用新型所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本实用新型的权利要求所涵盖。
双轨交通变轨系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0