











专利摘要
本发明公开了基于GNSS的桥梁实时监测快速初始化方法,包括:S100对北斗三频信号分别在各自频率上构建双差观测方程;S200线性化双差观测方程,并建误差方程;S300利用先验信息对待估参数加基准约束,利用随机模型对双差观测值进行定权;S400采用卡尔曼滤波法解算误差方程,获得模糊度参数的浮点解估计值;S500基于监测站坐标估计值和浮点解估计值,利用LAMBDA法进行模糊度搜索;S600对下一历元重复执行步骤S400~S500。本发明根据桥梁变形监测的短基线数据处理特点,利用北斗三频信号组建波长为4.88m的超宽巷组合观测值,极大地提高了模糊度固定效率,加快了桥梁实时监测中的初始化过程。
权利要求
1.基于GNSS的桥梁实时监测快速初始化方法,其特征是,包括:
S100 对北斗三频信号分别在各自频率上构建双差观测方程;
S200 线性化双差观测方程,并构建误差方程;本步骤进一步包括:
S210 选择整数组合(m,n,o)为(0,-1,1)、(1,-1,0)时的观测值分别作为超宽巷模糊度N
S220 根据
S230 将N
S240 根据矩阵形式的双差观测方程,构建包含北斗三频信号观测值的误差方程;
S300 利用先验信息对待估参数加基准约束,利用随机模型对双差观测值进行定权;
S400 采用卡尔曼滤波法解算误差方程,获得监测站坐标估计值和模糊度参数的浮点解估计值;这里的模糊度参数包括N
S500 基于监测站坐标估计值和浮点解估计值,利用LAMBDA法进行模糊度搜索,以进行模糊度固定;
S600 对下一历元重复执行步骤S400~S500。
2.如权利要求1所述的基于GNSS的桥梁实时监测快速初始化方法,其特征是:
步骤S100还包括:
对GPS双频信号也分别在各自频率上构建双差观测方程;
同时,步骤S200还包括:
选择整数组合(m,n)为(1,-1)时的观测值作为宽巷模糊度N
根据N
将N
根据矩阵形式的双差观测方程,构建包含GPS双频信号观测值的误差方程;
同时,步骤S400中,采用卡尔曼滤波法所解算的误差方程为:北斗三频信号观测值的误差方程和GPS双频信号观测值的误差方程融合后的误差方程。
3.如权利要求1或2所述的基于GNSS的桥梁实时监测快速初始化方法,其特征是:
所构建的各频率上的双差观测方程如下:
其中:δ表示双差映射;下标中的k表示频率标号,对北斗卫星导航系统,k取1、2、3;对GPS系统,k取1、2;下标中的p和q分别表示监测站和基准站的标号;上标中的i和j分别表示非基准卫星和基准卫星的标号;
当构建北斗三频信号的双差观测方程时,选择北斗卫星导航系统内高度角最高的卫星作为基准卫星;构建GPS双频信号的双差观测方程时,选择GPS系统内高度角最高的卫星作为基准卫星。
4.如权利要求1所述的基于GNSS的桥梁实时监测快速初始化方法,其特征是:
子步骤S230中,矩阵形式的双差观测方程为:
其中:
δ表示双差映射;
下标中的1、2、3分别表示北斗三频信号的频率标号;
下标中的p和q分别表示监测站和基准站的标号;
上标中的i和j分别表示非基准卫星和基准卫星的标号;
G表示双差站星距的三个单位分量;
λ
X为待估计监测站的坐标分量;
5.如权利要求1所述的基于GNSS的桥梁实时监测快速初始化方法,其特征是:
步骤S300中,所述利用先验信息对待估参数加基准约束,具体为:
所述待估参数包括监测站坐标和各频率上的双差模糊度参数;
根据监测站初始坐标的精度给定监测站坐标的约束量;
根据先验信息给定各频率上的双差模糊度参数的约束量。
6.如权利要求1所述的基于GNSS的桥梁实时监测快速初始化方法,其特征是:
步骤S300中,所述利用随机模型对双差观测值进行定权,具体为:
利用高度角随机模型为监测站对非基准卫星、基准站对非基准卫星、监测站对基准卫星、基准站对基准卫星的单程观测值分别给定标准差
利用式Q=Q
其中,Q
7.如权利要求1所述的基于GNSS的桥梁实时监测快速初始化方法,其特征是:
步骤S500具体为:
S510 固定超宽巷模糊度,进一步包括:
S511 根据超宽巷模糊度的浮点解估计值及其方差协方差矩阵,利用LAMBDA法搜索所有可能的超宽巷模糊度,并对所有可能的超宽巷模糊度进行Ratio阈值测试;
S512 当超宽巷模糊度的第一次Ratio阈值测试不通过时,将搜索的截止高度角提高至25度,并将超过5的卫星从模糊度搜索列表中剔除;然后,再次执行步骤S511;
S513 当超宽巷模糊度的第二次Ratio阈值测试不通过时,保留当前历元的N
S514 当超宽巷模糊度的Ratio阈值测试通过时,固定搜索得到的超宽巷模糊,采用固定的超宽巷模糊度更新误差方程的法方程中的超宽巷模糊度参数,获得更新后的N
S520 固定宽巷模糊度,进一步包括:
S521 根据更新后的宽巷模糊度及其方差协方差矩阵,利用LAMBDA法搜索所有可能的宽巷模糊度,并对所有可能的宽巷模糊度进行Ratio阈值测试;
S522 当宽巷模糊度的第一次Ratio阈值测试不通过时,将搜索的截止高度角提高至25度,并将两测站SNR差值超过5的卫星从模糊度搜索列表中剔除;然后,再次执行步骤S521;
S523 当宽巷模糊度的第二次Ratio阈值测试不通过时,保留当前历元的N
S524 当宽巷模糊度的Ratio阈值测试通过时,固定搜索得到的宽巷模糊度取值,采用固定的超宽巷模糊度和宽巷模糊度更新误差方程的法方程,获得更新后的N
S530 固定第一个频率上的原始模糊度参数,进一步包括:
S531 根据更新后的第一个频率上的原始模糊度参数N
S532 当原始模糊度的第一次Ratio阈值测试不通过时,将搜索的截止高度角提高至25度,并将两测站SNR差值超过5的卫星从模糊度搜索列表中剔除;然后,再次执行步骤S531;
S533 当原始模糊度的第二次Ratio阈值测试不通过时,保留当前历元的N
S534 当原始模糊度的Ratio阈值测试通过时,固定搜索得到的原始模糊度取值;
S540 当原始模糊度N
Ratio阈值为经验值,根据所需要的置信率设置。
说明书
技术领域
本发明属于桥梁监测技术领域,具体涉及基于GNSS(Global NavigationSatellite System)的桥梁实时监测快速初始化方法。
背景技术
目前GNSS技术已广泛应用于实时桥梁监测中,成为一种有效的桥梁变形及振动监测手段。在国内外大型桥梁的变形监测系统中,GPS已经成为一种不可缺少的传感器。其主要优点在于GPS技术依靠导航卫星提供观测信号,不受气候影响,可全天候工作;单个历元解算结果可达到水平精度10mm、垂直精度20mm,精度上满足提供桥梁低频变形量;接收机采样率目前最高支持100Hz,可实现桥梁振动监测;联合应用网络技术等可实现实时数据流传输,进而可提供实时的解算结果;同时,研制GPS桥梁监测系统可实现全自动运行,自动化程度高。
然而,目前基于GPS的监测技术仍然存在较多问题。桥梁监测中,监测点要选择在桥梁变形特征点上,如桥梁中跨、1/4跨、桥塔及桥墩上。由于桥塔本身、悬索或斜拉索及过往的车辆等遮挡、水面造成的GPS信号高度反射而产生的多路径效应、过往车辆造成卫星信号的频繁中断等,使得GPS依靠单频或双频载波相位观测值很难快速固定模糊度,从而无法获得模糊度固定解。因此,如何快速固定载波相位模糊度,实现初始化过程,是目前基于GNSS的桥梁监测亟待解决的问题。
当前常用的GPS技术在处理模糊度解算问题时,是对L1和L2两个频率信号组建宽巷观测值,实现较快模糊度固定的。宽巷观测值波长为0.86m,相较于L1波长0.19m和L2波长0.244m,在观测环境较好时可实现模糊度快速固定。但是在桥梁监测环境中,遮挡较为严重的情况下,还是未能实现快速模糊度固定。因此,组建更长波长组合观测值将可实现复杂环境下的模糊度快速固定问题。GPS虽然已可提供第三个频率L5信号,然而并未全星座运行。而我国北斗卫星导航系统目前已实现亚太地区全覆盖,组网卫星数已达20多颗,最重要的是所有卫星均提供三频信号。因此,可考虑利用北斗卫星导航系统提供的三频信号组建长波长的组合观测值。
发明内容
针对桥梁实时监测中因遇到遮挡而导致的初始化困难问题,本发明提供了基于GNSS的桥梁实时监测快速初始化方法。
本发明基于GNSS的桥梁实时监测快速初始化方法,利用北斗三频信号组建超宽巷观测值,来实现快速模糊度固定,具体步骤如下:
S100对北斗三频信号分别在各自频率上构建双差观测方程;
S200线性化双差观测方程,并构建误差方程;本步骤进一步包括:
S210选择整数组合(m,n,o)为(0,-1,1)、(1,-1,0)时的观测值分别作为超宽巷模糊度Newl和宽巷模糊度Nwl,即 其中,N1、N2、N3分别表示北斗三频信号在第1、2、3个频率上具有整周特性的双差模糊度参数;
S220根据 获得N2、N3的表达式;
S230将N2、N3的表达式代入对应频率上的双差观测方程,并将双差观测方程表示为矩阵形式;
S240根据矩阵形式的双差观测方程,构建包含北斗三频信号观测值的误差方程;
S300利用先验信息对待估参数加基准约束,利用随机模型对双差观测值进行定权;
S400采用卡尔曼滤波法解算误差方程,获得监测站坐标估计值和模糊度参数的浮点解估计值;这里的模糊度参数包括N1、Newl和Nwl;
S500基于监测站坐标估计值和浮点解估计值,利用LAMBDA法进行模糊度搜索,以进行模糊度固定;
S600对下一历元重复执行步骤S400~S500。
步骤S100还包括:
对GPS双频信号也分别在各自频率上构建双差观测方程;
同时,步骤S200还包括:
选择整数组合(m,n)为(1,-1)时的观测值作为宽巷模糊度Nwl,即Nwl=δN'1-δN'2;N'1、N'2分别表示GPS两个频率上的原始模糊度参数;
根据Nwl=δN'1-δN'2获得N2的表达式;
将N2的表达式代入GPS第2个频率上的双差观测方程,并将双差观测方程表示为矩阵形式;
根据矩阵形式的双差观测方程,构建包含GPS双频信号观测值的误差方程;
同时,步骤S400中,所述的误差方程为:北斗三频信号观测值的误差方程和GPS双频信号观测值的误差方程融合后的误差方程;根据北斗三频信号和GPS双频信号观测数据,采用卡尔曼滤波法对误差方程进行融合解算。
所构建的各频率上的双差观测方程如下:
其中:δ表示双差映射;下标中的k表示频率标号,对北斗卫星导航系统,k取1、2、3;对GPS系统,k取1、2;下标中的p和q分别表示监测站和基准站的标号;上标中的i和j分别表示非基准卫星和基准卫星的标号; 表示第k个频率上的站间星间双差载波相位观测值,这里,站间指监测站p和基准站q之间,星间指非基准卫星i和基准卫星j之间; 表示监测站p和基准站q之间和非基准卫星i和基准卫星j之间的双差几何距离; 表示第k个频率上具有整周特性的双差模糊度参数; 表示第k个频率上的载波相位观测值噪声;λk表示第k个频率的载波波长;
当构建北斗三频信号的双差观测方程时,选择北斗卫星导航系统内高度角最高的卫星作为基准卫星;构建GPS双频信号的双差观测方程时,选择GPS系统内高度角最高的卫星作为基准卫星。
进一步的,子步骤S230中,矩阵形式的双差观测方程为:
其中:
δ表示双差映射;
下标中的1、2、3分别表示北斗三频信号的频率标号;
下标中的p和q分别表示监测站和基准站的标号;
上标中的i和j分别表示非基准卫星和基准卫星的标号;
表示验前残差向量;
分别表示第1、2、3个频率上的站间星间双差载波相位观测值,这里,站间指监测站p和基准站q之间,星间指非基准卫星i和基准卫星j之间;
表示通过监测站p和基准站q以及非基准卫星i和基准卫星j的近似坐标计算得到的卫星到测站的距离双差项;
G表示双差站星距的三个单位分量;
λ1、λ2、λ3分别表示北斗三频信号的载波波长;
X为待估计监测站的坐标分量;
分别表示第1、2、3个频率上具有整周特性的双差模糊度参数;
分别表示第1、2、3个频率上的载波相位观测值噪声。
进一步的,步骤S300中,所述利用先验信息对待估参数加基准约束,具体为:
所述待估参数包括监测站坐标和各频率上的双差模糊度参数;
根据监测站初始坐标的精度给定监测站坐标的约束量;
根据先验信息给定各频率上的双差模糊度参数的约束量。
进一步的,步骤S300中,所述利用随机模型对双差观测值进行定权,具体为:
利用高度角随机模型为监测站对非基准卫星、基准站对非基准卫星、监测站对基准卫星、基准站对基准卫星的单程观测值分别给定标准差
利用式Q=Ql+Qb给定双差载波相位观测值的方差协方差矩阵Q;
其中,Ql表示与非基准卫星的双差载波相位观测值的方差协方差矩阵;Qb表示与基准卫星的双差载波相位观测值的方差协方差矩阵;
I3表示3维的单位矩阵;S表示观测到的卫星数;IS-1表示S-1维的单位矩阵;OS-1表示大小为(S-1)×(S-1)的单位方阵; 表示克罗内克积。
进一步的,步骤S500具体为:
S510固定超宽巷模糊度,进一步包括:
S511根据超宽巷模糊度的浮点解估计值及其方差协方差矩阵,利用LAMBDA法搜索所有可能的超宽巷模糊度,并对所有可能的超宽巷模糊度进行Ratio阈值测试;
S512当超宽巷模糊度的第一次Ratio阈值测试不通过时,将搜索的截止高度角提高至25度,并将两测站SNR差值超过5的卫星从模糊度搜索列表中剔除;然后,再次执行步骤S511;
S513当超宽巷模糊度的第二次Ratio阈值测试不通过时,保留当前历元的N1、Newl、Nwl的浮点解估计值,结束本步骤;
S514当超宽巷模糊度的Ratio阈值测试通过时,固定搜索得到的超宽巷模糊,采用固定的超宽巷模糊度更新误差方程的法方程中的超宽巷模糊度参数,获得更新后的Nwl、N1及其方差协方差矩阵;然后执行步骤S520;
S520固定宽巷模糊度,进一步包括:
S521根据更新后的宽巷模糊度及其方差协方差矩阵,利用LAMBDA法搜索所有可能的宽巷模糊度,并对所有可能的宽巷模糊度进行Ratio阈值测试;
S522当宽巷模糊度的第一次Ratio阈值测试不通过时,将搜索的截止高度角提高至25度,并将两测站SNR差值超过5的卫星从模糊度搜索列表中剔除;然后,再次执行步骤S521;
S523当宽巷模糊度的第二次Ratio阈值测试不通过时,保留当前历元的N1、Nwl的浮点解估计值,结束本步骤;
S524当宽巷模糊度的Ratio阈值测试通过时,固定搜索得到的宽巷模糊度取值,采用固定的超宽巷模糊度和宽巷模糊度更新误差方程的法方程,获得更新后的N1及其方差协方差矩阵;然后执行步骤S530;
S530固定第一个频率上的原始模糊度参数,进一步包括:
S531根据更新后的第一个频率上的原始模糊度参数N1及其方差协方差矩阵,利用LAMBDA法搜索所有可能的第一个频率上的原始模糊度,并对所有可能的原始模糊度进行Ratio阈值测试;
S532当原始模糊度的第一次Ratio阈值测试不通过时,将搜索的截止高度角提高至25度,并将两测站SNR差值超过5的卫星从模糊度搜索列表中剔除;然后,再次执行步骤S531;
S533当原始模糊度的第二次Ratio阈值测试不通过时,保留当前历元的N1的浮点解估计值,结束本步骤;
S534当原始模糊度的Ratio阈值测试通过时,固定搜索得到的原始模糊度取值;
S540当原始模糊度N1、超宽巷模糊度Newl和宽巷模糊度Nwl均被固定时,利用固定的原始模糊度N1、超宽巷模糊度Newl和宽巷模糊度Nwl,估计监测站坐标X;
Ratio阈值为经验值,根据所需要的置信率设置。
本发明具有如下特点和有益效果:
(1)本发明利用北斗三频信号,根据桥梁变形监测的短基线数据处理特点,组建波长为4.88m的超宽巷组合观测值,极大地提高了解算时模糊度固定效率,从而加快了桥梁实时监测中的初始化过程。
(2)本发明采用基于高度角和SNR(信噪比)的部分模糊度搜索策略,以排除受到多路径效应影响的超宽巷组合观测值,可最大限度减小有偏观测值对模糊度搜索的影响,提高宽巷和原始频点的模糊度质量。
(3)GPS在进行桥梁监测时,存在观测环境较差的条件下模糊度难以固定的问题,本发明即可解决该问题,且具有理论严密、模型简单、易于实现、精度高等特点,也可拓展应用于地质灾害监测、精密导航等多个领域。
附图说明
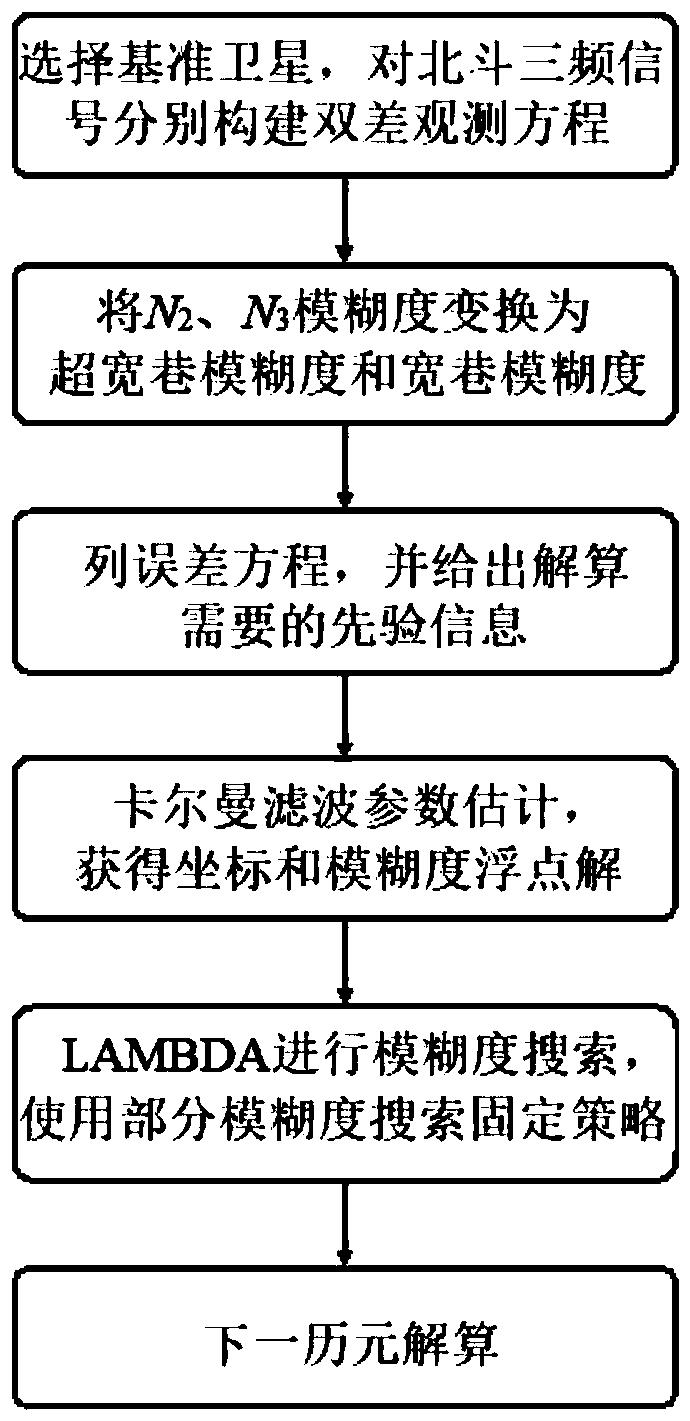
图1是本发明方法的流程图;
图2是模糊度搜索的具体流程图;
图3是实施例中本发明方法与常规方法的模糊度固定率对比图;
图4是实施例中本发明方法与常规方法的定位效果对比图。
具体实施方式
为了更清楚地说明本发明和/或现有技术中的技术方案,下面将对照附图说明本发明的具体实施方式。显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,并获得其他的实施方式。
应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
本发明的具体实施过程参见图1,具体步骤如下:
S100对北斗三频信号和GPS双频信号分别在各自频率上构建双差观测方程。
本发明中,可以只对北斗三频信号构建双差观测方程,也可以选择对北斗三频信号和GPS双频信号均构建双差观测方程,这样可增加观测卫星数量,提高观测精度。
在北斗卫星导航系统和GPS系统内分别选择各自高度角最高的卫星作为各自系统的基准卫星,然后对北斗三个频率和GPS双频的相位观测数据分别进行站间星间双差,构建双差观测方程。
对北斗三频信号构建的双差观测方程如下:
式(1)中:
下标中的1、2、3)分别表示北斗三频信号的频率标号;
下标中的p和q分别表示监测站和基准站的标号;
上标中的i和j分别表示北斗卫星导航系统的非基准卫星和基准卫星的标号;
δ表示双差映射;
分别表示北斗卫星导航系统第1、2、3个频率上的站间星间双差载波相位观测值,这里,站间指监测站p和基准站q之间,星间指北斗卫星导航系统的非基准卫星i和基准卫星j之间;
表示监测站p和基准站q之间和非基准卫星i和基准卫星j之间的双差几何距离;
分别表示北斗卫星导航系统第1、2、3个频率上具有整周特性的双差模糊度参数;
分别表示北斗卫星导航系统第1、2、3个频率上的载波相位观测值噪声;
λ1、λ2、λ3分别表示北斗三频信号的载波波长。
对GPS双频信号构建的双差观测方程参见式(1),但仅包括GPS系统两个频率的双差观测方程。
S200线性化双差观测方程,并构建误差方程。
现有技术中,一般仅采用原始载波相位进行模糊度固定。原始载波波长约20cm,模糊度固定较为困难。双频GPS情况下,构建的宽巷波长仅约0.86m,模糊度固定仍然困难。
对北斗卫星导航系统,原始频率的模糊度参数可组合成波长较长的模糊度参数δN(m,n,o),如下:
δN(m,n,o)=mδN1+nδN2+oδN3(2)
式(2)中:
N1、N2、N3分别表示3个频率上的原始模糊度参数。
(m,n,o)为三个原始模糊度参数前整数形式的系数值,以保证组合后模糊度的整数特性。
基于此,本发明则利用北斗三频信号,将三个北斗原始频率模糊度构建为超宽巷和宽巷模糊度参数。更具体的,根据短基线处理特点及北斗的三个频率设置,选择(m,n,o)为(0,-1,1)、(1,-1,0)时的观测值分别作为超宽巷模糊度Newl和宽巷模糊度Nwl,即 其中,超宽巷观测值EWL的模糊度波长为4.88m,宽巷观测值WL的模糊度波长为1.02m。
同时,为了增加观测卫星数,将北斗与GPS数据融合处理。对于GPS双频信号,选择(m,n)为(1,-1)时的观测值作为宽巷模糊度Nwl,即Nwl=δN'1-δN'2,这里,N'1、N'2分别表示GPS两个频率上的原始模糊度参数。
该两组组合观测值噪声较小,短基线条件下无需考虑电离层误差等,对北斗卫星导航系统,则原始的N2、N3待估计的模糊度参数用N1、Nwl和Newl表示为:
对GPS系统,则原始的N'2待估计的模糊度参数用N'1和Nwl表示为:
δN'2=δN'1-δNwl(4)
下面将以北斗卫星导航系统为例,说明矩阵化双差观测方程的具体实施过程:
式(3)代入式(1),参数化后表示为矩阵形式:
式(5)中:
δl表示验前残差向量;
X为监测站的坐标分量,为待估参数;
下标中的1、2、3分别表示北斗三频信号的频率标号;
下标中的p和q分别表示监测站和基准站的标号;
上标中的i和j分别表示北斗系统内的非基准卫星和基准卫星的标号;
表示通过监测站p和基准站q以及非基准卫星i和基准卫星j的近似坐标计算得到的卫星到测站的距离双差项;
表示建立的宽巷模糊度参数;
表示建立的超宽巷模糊度参数。
对GPS系统,则将式(4)代入GPS双频信号的双差观测方程,获得GPS双频信号双差观测方程的矩阵形式。
根据北斗三频信号和GPS双频信号的矩阵化双差观测方程,列出北斗三频信号和GPS双频信号融合解算所需要的观测方程,并考虑将三频和双频观测值统一写入法方程,所得误差方程表示为:
y=Bb+Aa+ε(6)
本发明中,首先获得北斗系统和GPS系统的误差方程,然后融合北斗系统和GPS系统的误差方程。
式(6)为北斗系统或GPS系统的误差方程,其中:
y=[δl
b包含监测站坐标参数;
a=[a
A为载波波长相关的矩阵,对北斗三频信号, 其中,λ1、λ2、λ3分别表示北斗三频信号的载波波长;对GPS双频信号, 其中,λ1、λ2分别表示GPS双频信号的载波波长;IS-1表示S-1维的单位矩阵,S表示观测到的北斗或GPS卫星数; 表示克罗内克积。
设计矩阵b为:
式(7)中,e3表示3维都为1的向量;G表示双差站星距S-1行3列的浮点型的单位分量。
S300给定先验信息,具体包括:对待估参数施加基准约束,以及对双差载波相位观测值进行定权。
本具体实施方式中,利用北斗的三频载波相位观测值和GPS双频载波相位观测值实现定位解算,需提供监测站坐标X以及 的初始值和约束量,对GPS观测数据,仅需第1个频率上的原始模糊度参数和宽巷模糊度的初始值:
式(8)中:
Ck表示误差方程中所有参数的先验方差协方差矩阵;
blkdiag表示斜对角矩阵形式;
I3表示3维的单位矩阵;
σp表示初始坐标约束量,实际应用时可根据监测站初始坐标的精度来定。
桥梁监测中,初始坐标变化一般在5m以内,则σp可赋值为5m。模糊度参数初始约束量为100周(模糊度的大数部分在计算卫地距时可得出,这里认为剩余的模糊度参数在100周以内)。
本发明中,双差载波相位观测值定权可采用如下方法:
利用高度角随机模型为监测站p对非基准卫星i、基准站q对非基准卫星i、监测站p对基准卫星j、基准站q对基准卫星j的单程观测值给定标准差 并利用下式给定双差载波相位观测值的方差协方差矩阵Q:
Q=Ql+Qb(9)
式(9)~(10)中:
Ql表示与非基准卫星的双差载波相位观测值的方差协方差矩阵;
Qb表示与基准卫星的双差载波相位观测值的方差协方差矩阵;
OS-1表示大小为(S-1)×(S-1)的单位方阵。
S400采用卡尔曼滤波法解算误差方程,获得监测站坐标估计值、模糊度参数的浮点解估计值以及模糊度参数的方差协方差矩阵。本步骤中,解算出的模糊度参数的浮点解估计值具体包括第一个频率上的原始模糊度参数N1、超宽巷模糊度Newl、和宽巷模糊度Nwl的浮点解估计值。
S500基于监测站坐标估计值和浮点解估计值,利用LAMBDA法进行模糊度搜索,以进行模糊度固定。
对本领域技术人员而言,LAMBDA法进行模糊度搜索为一种公知技术。下面将提供其一种优选的具体实施方式,但不限于此。本具体实施方式使用一次部分模糊度搜索固定策略,见图2,具体过程如下:
S510固定超宽巷模糊度,进一步包括:
S511根据超宽巷模糊度Newl的浮点解估计值及其方差协方差矩阵,利用LAMBDA法搜索所有可能的超宽巷模糊度,并对所有可能的超宽巷模糊度进行Ratio阈值测试;
S512当超宽巷模糊度的第一次Ratio阈值测试不通过时,将搜索的截止高度角提高至25度,并考虑监测站卫星SNR值与基准站同一卫星SNR值的差值不超过5,将超过5的卫星从模糊度搜索列表中剔除;然后,再次执行步骤S511;
S513当超宽巷模糊度的第二次Ratio阈值测试不通过时,保留当前的N1、Newl、Nwl模糊度参数的浮点解估计值,结束本步骤;
S514当超宽巷模糊度的Ratio阈值测试通过时,将搜索得到的超宽巷模糊度取值为整数,即固定超宽巷模糊度,采用固定的超宽巷模糊度更新误差方程的法方程中的超宽巷模糊度参数,并获得更新后的宽巷模糊度Nwl、第一个频率上的原始模糊度参数N1及其方差协方差矩阵;然后执行步骤S520。
S520固定宽巷模糊度,进一步包括:
S521根据更新后的宽巷模糊度Nwl及其方差协方差矩阵,利用LAMBDA法搜索所有可能的宽巷模糊度,并对所有可能的宽巷模糊度进行Ratio阈值测试;
S522当宽巷模糊度的第一次Ratio阈值测试不通过时,将搜索的截止高度角提高至25度,并考虑监测站卫星SNR值与基准站同一卫星SNR值的差值不超过5,将超过5的卫星从模糊度搜索列表中剔除;然后,再次执行步骤S521;
S523当宽巷模糊度的第二次Ratio阈值测试不通过时,保留当前的N1、Nwl模糊度参数的浮点解估计值,结束本步骤;
S524当宽巷模糊度的Ratio阈值测试通过时,将搜索得到的宽巷模糊度取值为整数,即固定宽巷模糊度,采用固定的超宽巷模糊度和宽巷模糊度更新误差方程的法方程,获得更新后的第一个频率上的原始模糊度参数N1及其方差协方差矩阵;然后执行步骤S530。
S530固定第一个频率上的原始模糊度参数,进一步包括:
S531根据更新后的第一个频率上的原始模糊度参数N1及其方差协方差矩阵,利用LAMBDA法搜索所有可能的第一个频率上的原始模糊度,并对所有可能的原始模糊度进行Ratio阈值测试;
S532当原始模糊度的第一次Ratio阈值测试不通过时,将搜索的截止高度角提高至25度,并考虑监测站卫星SNR值与基准站同一卫星SNR值的差值不超过5,将超过5的卫星从模糊度搜索列表中剔除;然后,再次执行步骤S531;
S533当原始模糊度的第二次Ratio阈值测试不通过时,保留当前的N1模糊度参数的浮点解估计值,结束本步骤;
S534当原始模糊度的Ratio阈值测试通过时,将搜索得到的原始模糊度取值为整数,即固定原始模糊度。
S540当原始模糊度N1、超宽巷模糊度Newl和宽巷模糊度Nwl均被固定时,利用固定的原始模糊度N1、超宽巷模糊度Newl和宽巷模糊度Nwl,估计监测站坐标X。
本具体实施方式中,Ratio阈值设为2,表示99.99%的置信率。
S600对下一历元执行重复执行步骤S400~S500。
实施例
本实施例选择桥梁监测中环境较差的两个测站S028、S007和环境较好的一个测站S029,其中,测站S028、S007设置于桥梁箱梁点,测站S029设置于桥塔。分别采用本发明方法和常规方法对测站S028、S007、S029的共600组观测数据(包括10个历元)进行模糊度固定,并进行模糊度固定率比较。见图3,其中图(a)、图(b)、图(c)分别为桥梁箱梁点S028测站、桥梁箱梁点S007测站、桥塔S029测站位置的模糊度固定率对比图,图中,FAR表示采用全部模糊度搜索固定策略,PAR表示采用部分模糊度搜索固定策略,GPS表示采用常规观测信号,BDS表示采用本发明三频信号,BDS/GPS表示利用北斗与GPS的观测数据进行融合解算,DF表示采用双频信号,TDF表示BDS采用了三频数据且组建超宽巷、宽巷模糊度解算。从图中可以看出,对于环境较差的两个测站S028、S007,无论是单独GPS双频数据、单独BDS双频数据,还是GPS和BDS融合双频数据,采用常规方法均不能保证10个历元以内100%固定所有模糊度单元;而利用本发明方法可实现10个历元100%模糊度固定率。对于环境较好测站,常规方法和本发明方法固定效率一致。
根据本发明方法和常规方法固定后的模糊度进行定位,定位效果对比见图4,图中,图(a)和图(c)为将本发明方法获得的定位序列去除平均值后、在南北、东西和垂直方向上的残余误差序列。从图中可以看出,本发明结果初数据丢失过程中残余误差较大外,其余历元南北、东西方向均在15mm以内波动,垂直方向在30mm以内波动。图(e)和图(f)是GPS和BDS融合双频数据的常规解法,所有历元的解残余误差很多时候超过0.6m。图(b)、图(d)、图(f)、图(h)分别是BDS和GPS双频数据的常规解算残余误差序列,从图中看出,在大部分情况下,单独GPS和BDS双频数据的常规解法得到的残余误差远大于本发明方法。
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
基于GNSS的桥梁实时监测快速初始化方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0