








专利摘要
本发明公开了一种动力总成惯性参数测试方法,将动力总成通过悬置元件安装在发动机试验台架上构成被测动力总成悬置系统,通过模态试验测试该悬置振动系统的6阶刚体模态频率来识别动力总成惯性参数。相对现有主流的惯性参数测试方法,该测试方法具有原理简单、测量简便,辨识参数少,无需将被测物体吊起,被测物体尺寸不受限制,测量精度高等优点。
权利要求
1.一种动力总成惯性参数测试方法,其特征在于将动力总成通过悬置元件安装在发动机试验台架上构成被测动力总成悬置系统,通过模态试验测试该悬置振动系统的6阶刚体模态频率来识别动力总成惯性参数,包括以下步骤:
<1>测定动力总成质心在发动机坐标系中位置和橡胶悬置元件参数
<2>获取动力总成悬置系统的试验模态频率和振型
<3>数据处理和计算动力总成惯性参数
3.1将动力总成视为具有空间6自由度的刚体,由悬置元件安装位置、角度和刚度建立被测动力总成悬置系统的刚度矩阵:
其中
3.2建立含被测动力总成未知惯性参数J=[Jxx Jyy Jzz Jxy Jyz Jxz]T和已知总质量m的动力总成悬置系统质量矩阵M(J):
3.3根据结构振动分析理论构造含有未知惯性参数J的动力总成悬置系统的6自由度无阻尼自由振动方程:
(K-ω2M(J))φ=0 (3)
其中ω=2πf为悬置系统的模态圆频率,φ为相应的模态振型;
3.4对上述动力总成悬置系统的无阻尼自由振动分析方程,给定一组惯性参数J,对动力总成悬置系统进行计算模态分析后可得到一组沿x、y、z和绕x、y、z轴振动的模
态频率f1(J)、f2(J)、f3(J)、f4(J)、f5(J)、f6(J);根据模态试验获得的各向振动频率f10、f20、f30、f40、f50、f60和(3)式模态分析结果,构造各向模态频率等于测试模态频率的方程组:
将(4)式简记为矩阵形式f(J)=I,则求解动力总成惯性参数的非线性方程为:
F(J)=f(J)-I=0 (5)
其中,
满足(5)式非线性方程组的解J,即为待求动力总成的惯性矩和惯性积参数。
2.根据权利要求1所述的动力总成惯性参数测试方法,其特征在于步骤3.4中(5)式非线性方程组的求解方法为:将J视为待求的未知量,采用解非线性方程组的牛顿迭代法求解F(J)=f(J)-I=0,或采用最小二乘法寻找方程的最小二乘解,得到被测动力总成的惯性参数J。
3.根据权利要求1所述的动力总成惯性参数测试方法,其特征在于步骤<1>按以下操作进行:
1.1测定动力总成在发动机坐标系下的质心o坐标(xo,yo,zo),建立动力总成质心坐标系o-xyz,发动机坐标系O-XYZ是发动机设计时的参考坐标系,动力总成质心坐标系原点位于质心,各坐标方向与发动机坐标系方向一致;
1.2采用万能材料试验机测定每个橡胶悬置元件沿其弹性主轴的三向刚度(kui,kvi,kwi);由发动机坐标系下悬置元件安装坐标与质心坐标的差值计算得到质心坐标系下的第i个悬置元件安装位置(xi,yi,zi);悬置元件安装角度由动力总成设计图纸确定或实测得到。
4.根据权利要求1所述的动力总成惯性参数测试方法,其特征在于步骤<2>按以下操作进行:
2.1将动力总成通过悬置元件安装在发动机试验台架上,构成被测的动力总成悬置系统,其中将动力总成视为具有空间三向平动自由度和三向转动自由度的刚体;将橡胶悬置元件简化沿其弹性主轴u、v、w的三向弹簧,一端与动力总成连接,另一端与试验台架基础连接;
2.2采用试验模态分析设备对被测的动力总成悬置系统进行试验模态分析,获取动力总成悬置系统的6阶刚体模态频率和对应的模态振型;这六个模态频率分别为沿X、Y、Z轴的平动频率f10、f20、f30和绕X、Y、Z的转动频率f40、f50、f60。
说明书
技术领域
本专利属于刚体惯性参数测试技术领域,尤其涉及一种动力总成惯性参数(包括惯性矩和惯性积)测试方法。
背景技术
汽车动力总成是由发动机和变速器构成的总成。汽车发动机动力总成悬置系统是指由发动机动力总成及其与车架或车身之间起弹性连接作用的悬置元件共同构成的系统。通常动力总成悬置系统分析方程建模时,假设车架是质量无限大的刚体,即直接将悬置元件一端接地固定,另一端与动力总成连接。
为对该悬置系统进行减振、隔振设计需要准确获取动力总成的质量、质心、惯性矩和惯性积等基本参数。惯性参数的准确与否对悬置系统的减振、隔振设计的效果有着重要影响。目前动力总成惯性参数(如惯性矩和惯性积)测试方法主要有复摆法、三线摆法、试验模态分析法等。复摆法、三线摆法是将被测物体悬吊,通过测量被测物体多种姿态下的摆动周期来计算惯性参数,然而复摆法测量精度低、误差较大,三线摆法虽然精度高,但需要反复调整被测物体姿态(6次以上),试验过程费时费力。常见的试验模态分析法有模态模型法、剩余质量法和直接系统识别法等,但试验模态分析法由于理论上的不完善导致惯性参数测量精度较低、误差较大,如:模态模型法要求一次激励试验得到动力总成的所有6阶模态频率和振型,实测中往往难以做到;剩余质量法的质量导纳线并非理想平直曲线,辨识结果易受到弹性模态影响;直接系统识别法需要辨识参数多,对信号噪声敏感,测量精度低。
发明内容
本发明要解决的技术问题是提供一种原理简单、操作简便、测量精度高的动力总成惯性参数测试方法,该法辨识参数少,无需将被测物体吊起且被测物体尺寸不受限制。
为解决上述技术问题,本发明采用以下技术方案:动力总成惯性参数测试方法,将动力总成通过悬置元件安装在发动机试验台架上构成被测动力总成悬置系统,通过模态试验测试该悬置振动系统的6阶刚体模态频率来识别动力总成惯性参数,包括以下步骤:
<1>测定动力总成质心在发动机坐标系中位置和橡胶悬置元件参数
<2>获取动力总成悬置系统的试验模态频率和振型
<3>数据处理和计算动力总成惯性参数
3.1将动力总成视为具有空间6自由度的刚体,由悬置元件安装位置、角度和刚度建立被测动力总成悬置系统的刚度矩阵:
其中
3.2建立含被测动力总成未知惯性参数J=[Jxx Jyy Jzz Jxy Jyz Jxz]T和已知总质量m的动力总成悬置系统质量矩阵M(J):
3.3根据结构振动分析理论构造含有未知惯性参数J的动力总成悬置系统的6自由度无阻尼自由振动方程:
(K-ω2M(J))φ=0 (3)
其中ω=2πf为悬置系统的模态圆频率,φ为相应的模态振型;
3.4对上述动力总成悬置系统的无阻尼自由振动分析方程,给定一组惯性参数J,对动力总成悬置系统进行计算模态分析后可得到一组沿x、y、z和绕x、y、z轴振动的模态频率f1(J)、f2(J)、f3(J)、f4(J)、f5(J)、f6(J);根据模态试验获得的各向振动频率f10、f20、f30、f40、f50、f60和(3)式模态分析结果,构造各向模态频率等于测试模态频率的方程组:
将(4)式简记为矩阵形式f(J)=I,则求解动力总成惯性参数的非线性方程为:
F(J)=f(J)-I=0 (5)
其中,
满足(5)式非线性方程组的解J,即为待求动力总成的惯性矩和惯性积参数。
步骤3.4中(5)式非线性方程组的求解方法为:或将J视为待求的未知量,采用解非线性方程的牛顿迭代法求解F(J)=f(J)-I=0,或采用最小二乘法寻找方程的最小二乘解,得到被测动力总成的惯性参数J。
步骤<1>按以下操作进行:
1.1测定动力总成在发动机坐标系下的质心o坐标(xo,yo,zo),建立动力总成质心坐标系o-xyz,发动机坐标系O-XYZ是发动机设计时的参考坐标系,动力总成质心坐标系原点位于质心,各坐标方向与发动机坐标系方向一致;
1.2采用万能材料试验机测定每个橡胶悬置元件沿其弹性主轴的三向刚度(kui,kvi,kwi);由发动机坐标系下悬置元件安装坐标与质心坐标的差值计算得到质心坐标系下的第i个悬置元件安装位置(xi,yi,zi);悬置元件安装角度由动力总成设计图纸确定或实测得到。
步骤<2>按以下操作进行:
2.1将动力总成通过悬置元件安装在发动机试验台架上,构成被测的动力总成悬置系统,其中将动力总成视为具有空间三向平动自由度和三向转动自由度的刚体;将橡胶悬置元件简化沿其弹性主轴u、v、w的三向弹簧,一端与动力总成连接,另一端与试验台架基础连接;
2.2采用试验模态分析设备对被测的动力总成悬置系统进行试验模态分析,获取动力总成悬置系统的6阶刚体模态频率和对应的模态振型;这六个模态频率分别为沿X、Y、Z轴的平动频率f10、f20、f30和绕X、Y、Z的转动频率f40、f50、f60。
针对现有测量动力总成惯性参数主要方法存在的测试过程繁杂,或理论不完善测试精度低,或理论过于复杂不易掌握的缺陷,发明人建立了一种动力总成惯性参数测试方法,即将动力总成通过悬置元件上安装在刚性基础上,构成动力总成悬置系统,通过测试悬置系统的6个动力总成刚体模态频率来识别该动力总成的惯性矩和惯性积参数。其中,根据动力总成悬置系统的模态分析方程,给出惯性参数反解方程;测试动力总成悬置系统的模态频率,则利用最小二乘法或牛顿迭代法反求动力总成的惯性矩和惯性积参数。
与现有测试方法相比,本发明的方法具有以下突出优点:
与复摆法、三线摆法相比,该法无需将被测物体吊起摆动,而是安装在悬置上,这样既可以测量尺寸较小物体也可测量尺寸较大的笨重物体;复摆法、三线摆法需要测量动力总成的六个以上的多种姿态,测量过程繁琐耗时,而该法无需测量被测物体多个姿态,只需测量被测动力总成悬置系统一组动力总成模态频率,试验操作更为简便。
与试验模态分析法相比,该法依据理论更为简单,易于工程试验人员掌握。与模态模型法相比,模态模型法要求必须一次激励试验得到所有6阶动力总成模态参数,而该法可多次激励测出悬置系统的6阶动力总成模态频率,对模态振型精度要求不高。与剩余质量法相比,被测体的弹性模态对本法的测试结果影响小。与直接系统识别法相比,该法只需测量悬置系统的动力总成模态频率,无需进行频率响应分析,则信号噪声的影响更小,测试结果更为准确;另外,该法只需要识别6个惯性参数,无需同时识别质心位置、重量等物理参数,需要识别的参数更少,对信号噪声不敏感,测量精度高。
附图说明
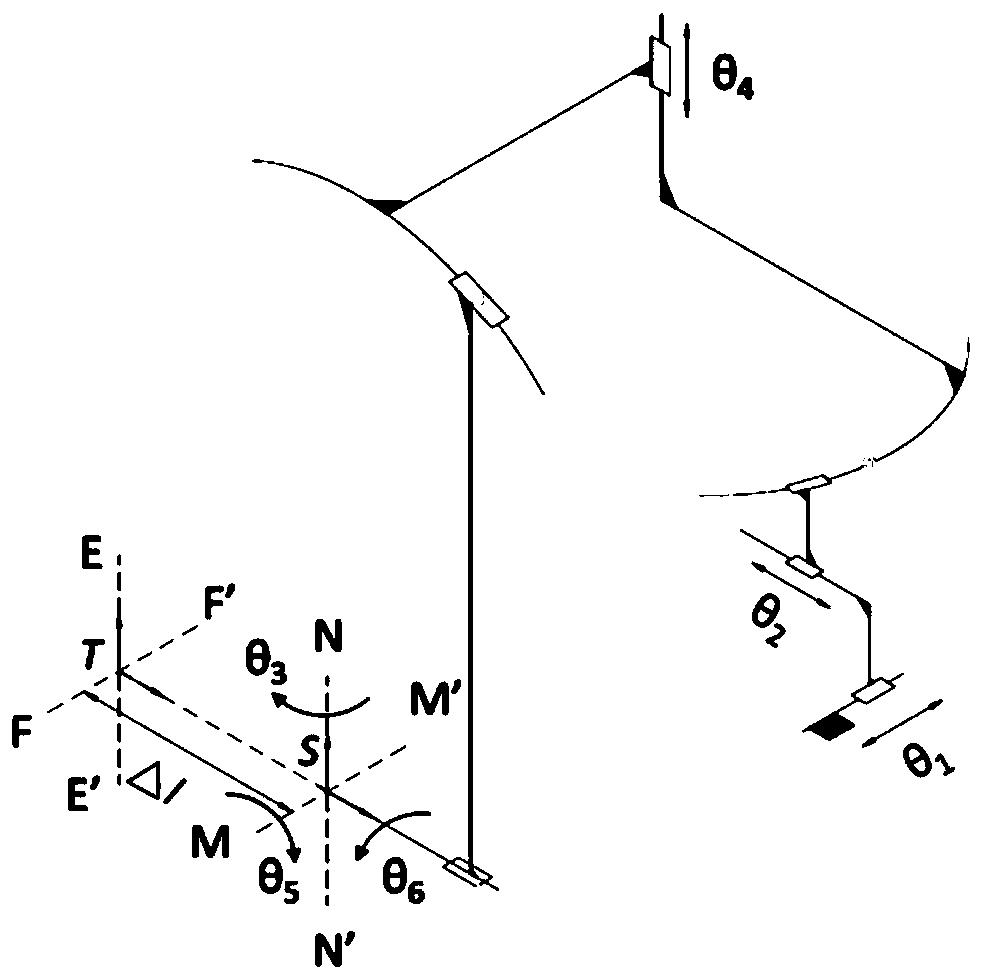
图1是4点悬置的动力总成悬置系统简化模型,图中:1、2、3、4分别表示各悬置元件与动力总成的连接点位置;o-xyz表示动力总成质心坐标系;O-XYZ表示发动机设计时的发动机坐标系;ku、kv、kw分别表示悬置元件沿其三个弹性主轴方向的刚度系数。
图2是本发明动力总成惯性参数测试方法的流程图。
具体实施方式
如图1所示,动力总成通常通过3或4个悬置元件安装在基础上。
图2显示了本发明动力总成惯性参数测试方法的流程,以下结合各附图进一步说明本发明的测试方法。
本发明动力总成惯性参数测试方法包括以下步骤:
<1>测定动力总成质心在发动机坐标系中位置和橡胶悬置元件参数
1.1测定动力总成在发动机坐标系下的质心o坐标(xo,yo,zo),建立动力总成质心坐标系o-xyz,如图1所示,发动机坐标系O-XYZ是发动机设计时的参考坐标系,动力总成质心坐标系原点位于质心,各坐标方向与发动机坐标系方向一致;
1.2采用万能材料试验机测定每个橡胶悬置元件沿其弹性主轴的三向刚度(kui,kvi,kwi);由发动机坐标系下悬置元件安装坐标与质心坐标的差值计算得到质心坐标系下的第i个悬置元件安装位置(xi,yi,zi);悬置元件安装角度由动力总成设计图纸确定或实测得到。
<2>获取动力总成悬置系统的试验模态频率和振型
2.1将动力总成通过悬置元件安装在发动机试验台架上,构成被测的动力总成悬置系统,如图1所示,其中将动力总成视为具有空间三向平动自由度和三向转动自由度的刚体;将橡胶悬置元件简化沿其弹性主轴u、v、w的三向弹簧,一端与动力总成连接,另一端与试验台架基础连接;
2.2采用试验模态分析设备对被测的动力总成悬置系统进行试验模态分析,获取动力总成悬置系统的6阶刚体模态频率和对应的模态振型;这六个模态频率分别为沿X、Y、Z轴的平动频率f10、f20、f30和绕X、Y、Z的转动频率f40、f50、f60。
<3>数据处理和计算动力总成惯性参数
3.1将动力总成视为具有空间6自由度的刚体,由悬置元件安装位置、角度和刚度建立被测动力总成悬置系统的刚度矩阵:
其中
3.2建立含被测动力总成未知惯性参数J=[Jxx Jyy Jzz Jxy Jyz Jxz]T和已知总质量m的动力总成悬置系统质量矩阵M(J):
3.3根据结构振动分析理论构造含有未知惯性参数J的动力总成悬置系统的6自由度无阻尼自由振动方程:
(K-ω2M(J))φ=0 (3)
其中ω=2πf为悬置系统的模态圆频率,φ为相应的模态振型;
3.4对上述动力总成悬置系统的无阻尼自由振动分析方程,给定一组惯性参数J,对动力总成悬置系统进行计算模态分析后可得到一组沿x、y、z和绕x、y、z轴振动的模态频率f1(J)、f2(J)、f3(J)、f4(J)、f5(J)、f6(J);根据(2.2)模态试验获得的各向振动频率f10、f20、f30、f40、f50、f60和(3)式模态分析结果,构造各向模态频率等于测试模态频率的方程组:
将(4)式简记为矩阵形式f(J)=I,则求解动力总成惯性参数的非线性方程为:
F(J)=f(J)-I=0 (5)
其中,
满足(5)式非线性方程组的解J,即为待求动力总成的惯性矩和惯性积参数。求解方法为:将J视为待求的未知量,采用解非线性方程组的牛顿迭代法求解F(J)=f(J)-I=0,或采用最小二乘法寻找方程的最小二乘解,得到被测动力总成的惯性参数J。
应用例
某三点悬置动力总成总质量为109.22Kg,质心和各悬置点在发动机坐标系中的坐标位置如表1。
表1
各悬置元件沿其弹性主轴u,v,w向的刚度系数如表2。
表2
各悬置元件均采用正装,即悬置元件的弹性主轴u,v,w与发动机坐标系XYZ方向一致。因此各悬置元件的方向余弦阵
通过模态试验获得的动力总成悬置系统模态频率如表3。
表3 单位:Hz
由上述数据建立动力总成悬置系统模态分析方程(3)和动力总成惯性参数反求方程组(5)后,利用最小二乘法迭代求解方程组(5)得到该动力总成的惯性参数如表4。
表4 单位Kg□m2
动力总成惯性参数测试方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。






动态评分
0.0