









专利摘要
本发明适用于多传感器信息融合领域,提供了一种适用于闪烁噪声的多机动目标跟踪方法与系统,通过预测步骤、更新步骤、融合步骤、生成步骤以及提取步骤,用t分布建模闪烁噪声,应用变分贝叶斯方法近似地求出不同模型下观测噪声的协方差、目标状态以及自由度的联合概率密度,有效解决了闪烁噪声下多机动目标的跟踪问题,提高了多机动目标的跟踪精度。
权利要求
1.一种适用于闪烁噪声的多机动目标跟踪方法,其特征在于,所述方法包括:
步骤1、利用前一时刻各个目标的运动模型、以及高斯伽玛混合分布和存在概率产生伽玛分布的形状参数和尺度参数;根据前一时刻各个目标的运动模型、高斯伽玛混合分布和存在概率、当前时刻与前一时刻的时间差、模型间的马尔可夫转移概率、以及伽玛分布的形状参数和尺度参数,得到当前时刻各个目标在不同运动模型下的预测高斯伽玛混合分布和预测存在概率;
步骤2、根据当前时刻各个目标在不同运动模型下的预测高斯伽玛混合分布和预测存在概率,利用变分贝叶斯方法对当前时刻的测量数据进行序贯处理,得到当前时刻各个目标在不同运动模型下的更新高斯伽玛混合分布和更新存在概率;
步骤3、对当前时刻各个目标在不同运动模型下的更新高斯伽玛混合分布和更新存在概率分别进行融合,得到当前时刻已存在目标的运动模型、高斯伽玛混合分布和存在概率;
步骤4、利用当前时刻的测量数据生成新生目标的高斯伽玛混合分布,为所述新生目标指定存在概率,并选取匀速运动模型作为新生目标的运动模型,将所述新生目标的运动模型、高斯伽玛混合分布及存在概率分别与所述当前时刻已存在目标的运动模型、高斯伽玛混合分布及存在概率进行合并,得到当前时刻各个目标的运动模型、高斯伽玛混合分布和存在概率;
步骤5、从所述当前时刻各个目标中裁减掉存在概率小于第一阈值的目标,并将裁减后余下的目标的运动模型、高斯伽玛混合分布和存在概率作为滤波器下一次递归的输入;
从所述裁减后余下的目标中提取存在概率大于第二阈值的目标,并将提取出的目标的高斯伽玛混合分布作为当前时刻的输出,将输出的高斯伽玛混合分布中,高斯分布的均值作为当前时刻目标的状态估计。
2.如权利要求1所述的方法,其特征在于,所述步骤1包括:
以k-1表示前一时刻,k表示当前时刻,tk-1表示前一时刻的时间,tk表示当前时刻的时间,ri,k-1表示前一时刻目标i的运动模型标识,且1≤ri,k-1≤Mr,ri,k表示当前时刻目标i的模型标识,且ri,k=1,2,…,Mr,其中,Mr表示运动模型的总数目;当前时刻的测量噪声服从ξ维的学生t分布,以S(yj,k;Hkxi,k,Ri,k,νi,k)表示当前时刻测量的概率密度函数,其中,yj,k表示当前时刻的一个测量,Hk表示测量矩阵,xi,k表示目标的状态,Ri,k表示精度矩阵,νi,k表示t分布的自由度,且 为精度矩阵Ri,k主对角线上的各个元素;
已知k-1时刻目标i的运动模型为ri,k-1,则在该模型ri,k-1下的高斯伽玛混合分布为 存在概率为ρi,k-1(ri,k-1);其中,N表示高斯分布,g表示伽玛分布,xi,k-1表示k-1时刻目标i的状态向量,mi,k-1(ri,k-1)和Pi,k-1(ri,k-1)分别表示k-1时刻目标i在模型ri,k-1下的高斯伽玛混合分布中高斯分布的均值和协方差, 表示k-1时刻精度矩阵 的对角线元素,νi,k-1表示k-1时刻t分布的自由度, 和γi,k-1(ri,k-1)表示k-1时刻目标i在模型ri,k-1下的高斯伽玛混合分布中伽玛分布的形状参数, 和ηi,k-1(ri,k-1)表示k-1时刻目标i在模型ri,k-1下的高斯伽玛混合分布中伽玛分布的尺度参数,ξ表示状态向量的维数,i=1,2,...,Nk-1,Nk-1表示前一时刻目标的总数;
根据k-1时刻目标i的运动模型、高斯伽玛混合分布和存在概率、当前时刻与前一时刻的时间差、以及模型间的马尔可夫转移概率,得到当前时刻目标i在模型ri,k下的预测高斯伽玛混合分布为 预测存在概率为ρi,k|k-1(ri,k);其中,mi,k|k-1(ri,k)=Fk-1(ri,k)mi,k-1(ri,k-1), γi,k|k-1(ri,k)=ργγi,k-1(ri,k-1),ηi,k|k-1(ri,k)=ρηηi,k-1(ri,k-1),ρi,k|k-1(ri,k)=ps,k(tk-tk-1)tk|k-1(ri,k|ri,k-1)ρi,k-1(ri,k-1),Fk-1(ri,k)表示k-1时刻目标i在模型ri,k下的状态转移矩阵,Qk-1(ri,k)表示k-1时刻目标i在模型ri,k下的过程噪声协方差矩阵,上标T表示矩阵或向量的转置,ρα,ρβ,ργ,ρη表示传递因子,取值范围为(0,1],ps,k(tk-tk-1)表示目标的幸存概率,且 tk|k-1(ri,k|ri,k-1)表示模型间的马尔可夫转移概率,T表示采样周期,δ为预定的常数,l=1,...,ξ,ξ表示状态向量的维数。
3.如权利要求2所述的方法,其特征在于,设当前时刻的测量集为yk=(y1,k,...,yM,k),其中,M为当前时刻的测量数据的总数,则所述步骤2包括:
以当前时刻各个目标在Mr个运动模型下的预测高斯伽玛混合分布和预测存在概率,作为当前时刻各个目标在相应运动模型下的初始高斯伽玛混合分布和初始存在概率,则目标i在模型ri,k下的初始高斯伽玛混合分布取为 初始存在概率取为 其中i=1,2,...,Nk-1,ri,k=1,2,…,Mr,
利用变分贝叶斯方法对第1个至第M个当前时刻的测量数据进行序贯处理,具体包括以下:
设第j个测量数据处理前,目标i在模型ri,k下的高斯伽玛混合分布及存在概率分别为 和 其中,i=1,2,...,Nk-1,ri,k=1,2,…,Mr,j=1,2,…,M;
根据变分贝叶斯方法,计算得到第j个测量更新时,目标i在模型ri,k下的高斯伽玛混合分布为 存在概率分别为 其中,
表示伽玛函数,tr表示矩阵的迹, 表示均值向量, 表示协方差矩阵, 表示滤波器增益,伽玛分布的形状参数为 和 伽玛分布的尺度参数为 和 精度矩阵为 其中, Hk为模型ri,k的观测矩阵,PD,k为目标的检测概率,λc,k为杂波密度,yj,k为当前时刻接收到的第j个测量数据,上标T表示矩阵或向量的转置,ξ为状态向量的总维数;
若 则第j个测量数据处理后,目标i在模型ri,k下的的高斯伽玛混合分布为 目标i的存在概率为 其中
若 则第j个测量数据处理后,目标i在模型ri,k下的高斯伽玛混合分布为 目标i的存在概率为 其中,
在第M个测量数据处理后,目标i在模型ri,k下的高斯伽玛混合分布和存在概率分别为 和 其中,i=1,2,...,Nk-1,ri,k=1,2,…,Mr;
将第M个测量数据处理后,各个目标在不同模型下的高斯伽玛混合分布及存在概率分别作为当前时刻各个目标的更新高斯伽玛混合分布和存在概率,则所述当前时刻各个目标在不同运动模型下的更新高斯伽玛混合分布为 更新存在概率为 其中i=1,…,Nk-1,ri,k=1,2,…,Mr,
4.根据权利要求3所述的方法,其特征在于,所述步骤3包括:
对当前时刻目标i在Mr个运动模型下的更新的高斯伽玛混合分布和存在概率分别进行融合,得到当前时刻已存在目标q的运动模型为rq,k、高斯伽玛混合分布为 和存在概率为ρq,k(rq,k),其中,q为当前时刻已存在目标的索引号,且q=1,…,Nk-1, 伽玛分布的形状参数为 和 伽玛分布的尺度参数为 和
5.如权利要求4所述的方法,其特征在于,所述步骤4包括:
选取匀速运动模型作为新生目标的运动模型,设此时新生目标的运动模型为rj,k=1,其中,j=1,…,M;
利用M个测量数据生成当前时刻新生目标的高斯伽玛混合分布为
其中,j=1,…,M, 为第j个新生目标的协方差, 由第j个测量数据yj,k=[xj,k yj,k]T产生,且 和 为第j个新生目标分布函数中伽玛分布的形状参数, 和 为第j个新生目标分布函数中伽玛分布的尺度参数;
指定当前时刻各新生目标的存在概率为 其中,j=1,…,M,ρυ为所指定的存在概率;
将所述当前时刻已存在目标的运动模型与所述当前时刻新生目标的运动模型合并,得到当前时刻各个目标的运动模型为 其中,Nk=Nk-1+M;
将所述当前时刻已存在目标的高斯伽玛混合分布与所述当前时刻新生目标的高斯伽玛混合分布进行合并,得到当前时刻各个目标的高斯伽玛混合分布为
将所述当前时刻各个目标的存在概率与所述当前时刻新生目标的存在概率进行合并,得到所述当前时刻各个目标的存在概率为
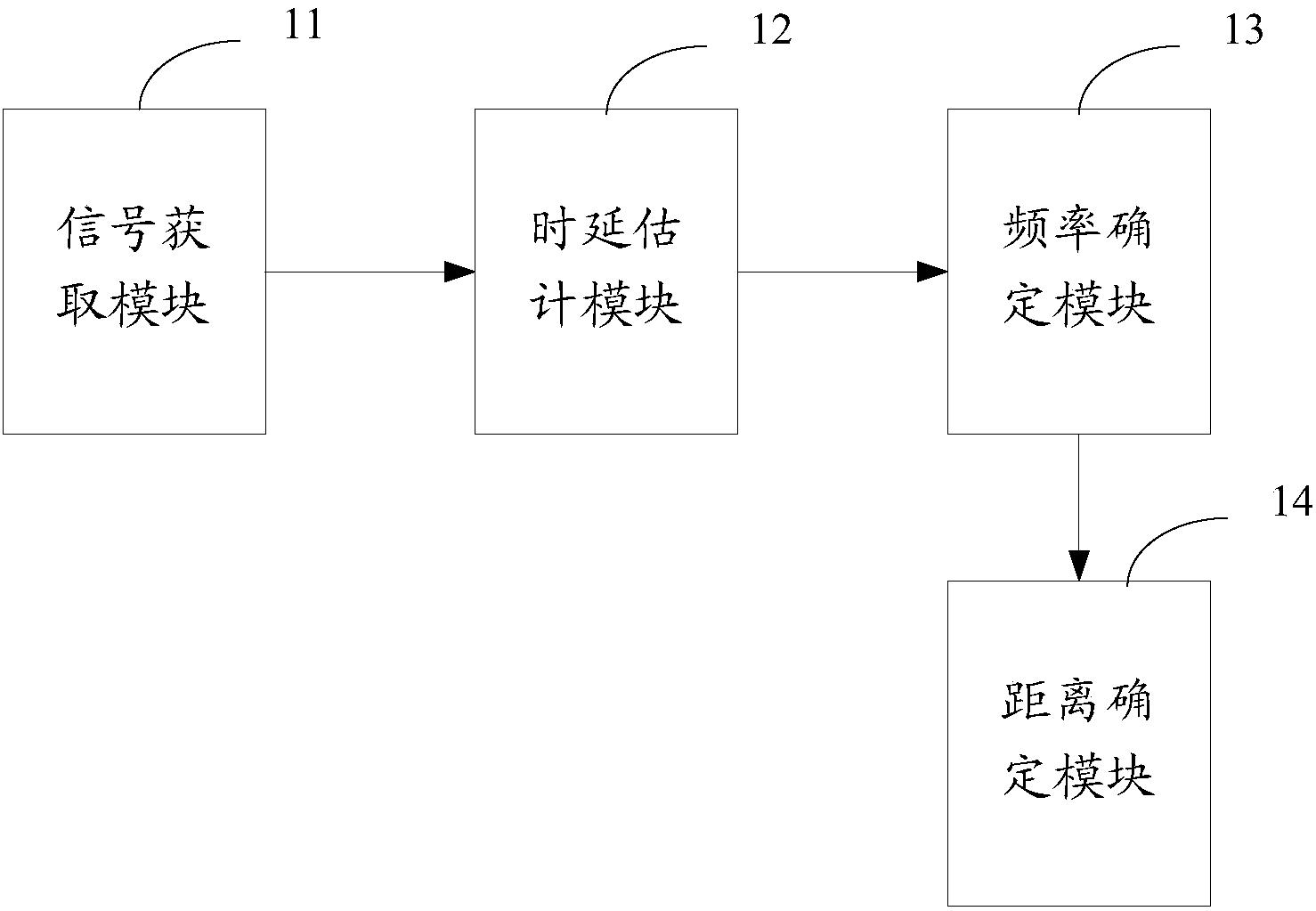
6.一种适用于闪烁噪声的多机动目标跟踪系统,其特征在于,所述系统包括:
预测模块,用于利用前一时刻各个目标的运动模型、以及高斯伽玛混合分布和存在概率产生伽玛分布的形状参数和尺度参数;根据前一时刻各个目标的运动模型、高斯伽玛混合分布和存在概率、当前时刻与前一时刻的时间差、模型间的马尔可夫转移概率、以及伽玛分布的形状参数和尺度参数,得到当前时刻各个目标在不同运动模型下的预测高斯伽玛混合分布和预测存在概率;
更新模块,用于根据当前时刻各个目标在不同运动模型下的预测高斯伽玛混合分布和预测存在概率,利用变分贝叶斯方法对当前时刻的测量数据进行序贯处理,得到当前时刻各个目标在不同运动模型下的更新高斯伽玛混合分布和更新存在概率;
融合模块,用于对当前时刻各个目标在不同运动模型下的更新高斯伽玛混合分布和更新存在概率分别进行融合,得到当前时刻已存在目标的运动模型、高斯伽玛混合分布和存在概率;
生成模块,用于利用当前时刻的测量数据生成新生目标的高斯伽玛混合分布,为所述新生目标指定存在概率,并选取匀速运动模型作为新生目标的运动模型,将所述新生目标的运动模型、高斯伽玛混合分布及存在概率分别与所述当前时刻已存在目标的运动模型、高斯伽玛混合分布及存在概率进行合并,得到当前时刻各个目标的运动模型、高斯伽玛混合分布和存在概率;
提取模块,用于从所述当前时刻各个目标中裁减掉存在概率小于第一阈值的目标,并将裁减后余下的目标的运动模型、高斯伽玛混合分布和存在概率作为滤波器下一次递归的输入;从所述裁减后余下的目标中提取存在概率大于第二阈值的目标,并将提取出的目标的高斯伽玛混合分布作为当前时刻的输出,将输出的高斯伽玛混合分布中,高斯分布的均值作为当前时刻目标的状态估计。
7.如权利要求6所述的系统,其特征在于,所述预测模块具体用于:
以k-1表示前一时刻,k表示当前时刻,tk-1表示前一时刻的时间,tk表示当前时刻的时间,ri,k-1表示前一时刻目标i的运动模型标识,且1≤ri,k-1≤Mr,ri,k表示当前时刻目标i的模型标识,且ri,k=1,2,…,Mr,其中,Mr表示运动模型的总数目;当前时刻的测量噪声服从ξ维的学生t分布,以S(yj,k;Hkxi,k,Ri,k,νi,k)表示当前时刻测量的概率密度函数,其中,yj,k表示当前时刻的一个测量,Hk表示测量矩阵,xi,k表示目标的状态,Ri,k表示精度矩阵,νi,k表示t分布的自由度,且 为精度矩阵Ri,k主对角线上的各个元素;
已知k-1时刻目标i的运动模型为ri,k-1,则在该模型ri,k-1下的高斯伽玛混合分布为 存在概率为ρi,k-1(ri,k-1);其中,N表示高斯分布,g表示伽玛分布,xi,k-1表示k-1时刻目标i的状态向量,mi,k-1(ri,k-1)和Pi,k-1(ri,k-1)分别表示k-1时刻目标i在模型ri,k-1下的高斯伽玛混合分布中高斯分布的均值和协方差, 表示k-1时刻精度矩阵 的对角线元素,νi,k-1表示k-1时刻t分布的自由度, 和γi,k-1(ri,k-1)表示k-1时刻目标i在模型ri,k-1下的高斯伽玛混合分布中伽玛分布的形状参数, 和ηi,k-1(ri,k-1)表示k-1时刻目标i在模型ri,k-1下的高斯伽玛混合分布中伽玛分布的尺度参数,ξ表示状态向量的维数,i=1,2,...,Nk-1,Nk-1表示前一时刻目标的总数;
根据k-1时刻目标i的运动模型、高斯伽玛混合分布和存在概率、当前时刻与前一时刻的时间差、以及模型间的马尔可夫转移概率,得到当前时刻目标i在模型ri,k下的预测高斯伽玛混合分布为 预测存在概率为ρi,k|k-1(ri,k);其中,mi,k|k-1(ri,k)=Fk-1(ri,k)mi,k-1(ri,k-1), γi,k|k-1(ri,k)=ργγi,k-1(ri,k-1),ηi,k|k-1(ri,k)=ρηηi,k-1(ri,k-1),ρi,k|k-1(ri,k)=ps,k(tk-tk-1)tk|k-1(ri,k|ri,k-1)ρi,k-1(ri,k-1),Fk-1(ri,k)表示k-1时刻目标i在模型ri,k下的状态转移矩阵,Qk-1(ri,k)表示k-1时刻目标i在模型ri,k下的过程噪声协方差矩阵,上标T表示矩阵或向量的转置,ρα,ρβ,ργ,ρη表示传递因子,取值范围为(0,1],ps,k(tk-tk-1)表示目标的幸存概率,且 tk|k-1(ri,k|ri,k-1)表示模型间的马尔可夫转移概率,T表示采样周期,δ为预定的常数,l=1,...,ξ,ξ表示状态向量的维数。
8.如权利要求7所述的系统,其特征在于,设当前时刻的测量集为yk=(y1,k,...,yM,k),其中,M为当前时刻测量的总数,则所述更新模块具体用于:
以当前时刻各个目标在Mr个运动模型下的预测高斯伽玛混合分布和预测存在概率,作为当前时刻各个目标在相应运动模型下的初始高斯伽玛混合分布和初始存在概率,则目标i在模型ri,k下的初始高斯伽玛混合分布取为 初始存在概率取为 其中i=1,2,...,Nk-1,ri,k=1,2,…,Mr,
利用变分贝叶斯方法对第1个至第M个当前时刻的测量数据进行序贯处理,具体包括以下:
设第j个测量数据处理前,目标i在模型ri,k下的高斯伽玛混合分布及存在概率分别为 和 其中,i=1,2,...,Nk-1,ri,k=1,2,…,Mr,j=1,2,…,M;
根据变分贝叶斯方法,计算得到第j个测量更新时,目标i在模型ri,k下的高斯伽玛混合分布为 存在概率分别为 其中,
表示伽玛函数,tr表示矩阵的迹, 表示均值向量, 表示协方差矩阵, 表示滤波器增益,伽玛分布的形状参数为 和 伽玛分布的尺度参数为 和 精度矩阵为 其中, Hk为模型ri,k的观测矩阵,PD,k为目标的检测概率,λc,k为杂波密度,yj,k为当前时刻接收到的第j个测量数据,上标T表示矩阵或向量的转置,ξ为状态向量的总维数;
若 则第j个测量数据处理后,目标i在模型ri,k下的的高斯伽玛混合分布为 目标i的存在概率为 其中
若 则第j个测量数据处理后,目标i在模型ri,k下的高斯伽玛混合分布为 目标i的存在概率为 其中,
在第M个测量数据处理后,目标i在模型ri,k下的高斯伽玛混合分布和存在概率分别为 和 其中,i=1,2,...,Nk-1,ri,k=1,2,…,Mr;
将第M个测量数据处理后,各个目标在不同模型下的高斯伽玛混合分布及存在概率分别作为当前时刻各个目标的更新高斯伽玛混合分布和存在概率,则所述当前时刻各个目标在不同运动模型下的更新高斯伽玛混合分布为
更新存在概率为 其中i=1,…,Nk-1,ri,k=1,2,…,Mr,
9.如权利要求8所述的系统,其特征在于,所述融合模块具体用于:
对当前时刻目标i在Mr个运动模型下的更新的高斯伽玛混合分布和存在概率分别进行融合,得到当前时刻已存在目标q的运动模型为rq,k、高斯伽玛混合分布为 和存在概率为ρq,k(rq,k),其中,q为当前时刻已存在目标的索引号,且q=1,…,Nk-1, 伽玛分布的形状参数为 和 伽玛分布的尺度参数为 和
10.如权利要求9所述的系统,其特征在于,所述生成模块具体用于:
选取匀速运动模型作为新生目标的运动模型,设此时新生目标的运动模型为rj,k=1,其中,j=1,…,M;
利用M个测量数据生成当前时刻新生目标的高斯伽玛混合分布为
其中,j=1,…,M,
一种适用于闪烁噪声的多机动目标跟踪方法及系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。



















动态评分
0.0