

IPC分类号 : G01S17/00,G01S17/06,G01S17/02,G01S17/93,G01S15/02,G01S15/06,G01S15/93,G01S15/00






专利摘要
本发明公开了一种用于洞穴三维建模的飞行器,包括安装在飞行器主体上的舵机转动平台、激光扫描传感器、三轴加速度传感器、陀螺仪传感器、飞行器主控制器、无线数据发送模块,其中:两个舵机转动平台分别安装在飞行器主体的上下端面;每个舵机转动平台包括第一舵机及第二舵机,第一舵机与飞行器主体固定连接,第一舵机的第一舵机转动轴通过舵机连接臂与第二舵机连接,第二舵机通过第二舵机转动轴与激光扫描传感器连接,第一舵机转动轴与第二舵机转动轴垂直。本发明能够在不需人类进入危险洞穴,且不受洞穴内部光线条件约束、不依靠GPS的情况下探测整个测区洞穴的空间分布情况、实现飞行器的自我空间定位并构造出目标洞穴的三维空间模型。
权利要求
1.一种用于洞穴三维建模的飞行器,其特征在于,包括飞行器主体,以及安装在飞行器主体上的舵机转动平台、激光扫描传感器、三轴加速度传感器、陀螺仪传感器、飞行器主控制器、无线数据发送模块,其中:
两个舵机转动平台分别安装在飞行器主体的上下端面;
每个舵机转动平台包括第一舵机及第二舵机,第一舵机与飞行器主体固定连接,第一舵机的第一舵机转动轴通过舵机连接臂与第二舵机连接,第二舵机通过第二舵机转动轴与激光扫描传感器连接,第一舵机转动轴与第二舵机转动轴垂直。
2.如权利要求1的用于洞穴三维建模的飞行器,其特征在于,用于洞穴三维建模的飞行器的前端还安装有超声波传感器。
3.如权利要求2的用于洞穴三维建模的飞行器,其特征在于,还包括安装在飞行器主体上的无线数据接收模块。
4.一种用于洞穴三维建模的建模方法,其特征在于,使用如权利要求1的用于洞穴三维建模的飞行器进行洞穴探测,包括如下步骤:
飞行器由初始位置出发,由飞行器主控制器控制飞行器向目标洞穴内飞行;
三轴加速度传感器采集加速度信号,陀螺仪传感器采集角度信号,飞行器主控制器基于加速度信号及角度信号生成飞行器的位置信息,无线数据发射模块将飞行器的位置信息发送至设置在洞穴外部的处理器;
激光扫描传感器扫描目标洞穴的切面数据,无线数据发射模块发送目标洞穴的切面数据至处理器,处理器基于切面数据及飞行器的位置信息对目标洞穴进行三维建模。
5.如权利要求4的用于洞穴三维建模的建模方法,其特征在于,生成飞行器的位置信息的方法包括:
飞行器主控制器每隔时间段ΔT向处理器发送飞行器的位置信息,飞行器在初始位置时,设飞行器的中心点为o,正前方为x轴的正方向,正左方为y轴的正方向,正上方为z轴的正方向,飞行器的空间坐标为
6.如权利要求4的用于洞穴三维建模的建模方法,其特征在于,基于切面数据及飞行器的位置信息对目标洞穴进行三维建模的方法包括:
激光扫描传感器扫描的目标洞穴的切面数据包括切面的离散点数据,将离散点数据连续化得到封闭曲线,获得两个间隔一个时间段ΔT的封闭曲线之间的对应关系,设两个封闭曲线的时间点分别为t
7.如权利要求4所述的用于洞穴三维建模的建模方法,其特征在于,用于洞穴三维建模的飞行器的前端还安装有超声波传感器,用于洞穴三维建模的建模方法还包括:
飞行器主控制器基于激光扫描传感器扫描的切面数据及超声波传感器反馈的距离信息对洞穴内的障碍物进行躲避。
8.如权利要求4所述的用于洞穴三维建模的建模方法,其特征在于,所述洞穴三维建模的飞行器还包括安装在飞行器主体上的无线数据接收模块,所述用于洞穴三维建模的建模方法还包括:
当用于洞穴三维建模的飞行器出现故障时,所述无线数据发送模块将故障信息发送至处理器,处理器接收到故障信息后,人为通过处理器向无线数据接收模块发送手动控制命令,对所述用于洞穴三维建模的飞行器进行手动控制。
说明书
技术领域
本发明涉及勘探技术领域,尤其涉及一种用于洞穴三维建模的飞行器及建模方法。
背景技术
随着社会的进步和科学技术的发展,人类出于各自不同的目的,对洞穴的了解需求越来越多,特别是洞穴内部的空间分布情况,有时需要构建其内部三维空间的模型。但是洞穴内部由于其环境的未知性和复杂性——安全性未知、光线条件差、没有GPS信号等,不适合人类直接进入探测建模。比如在一些工程建设或矿产资源开采中,常会遇到各种不同的地下洞穴,使得项目的安全和质量受到极大地影响,所以必需对洞穴内部的规模以及空间分布情况进行探测;又比如在考古科研方面,有时需要了解地下墓穴的内部空间分布情况,方便科研人员的考古发掘工作等。
因此,本发明提供了一种用于洞穴三维建模的飞行器及建模方法,能够在不需人类进入危险洞穴,且不受洞穴内部光线条件约束、不依靠GPS的情况下探测整个测区洞穴的空间分布情况、实现飞行器的自我空间定位并构造出目标洞穴的三维空间模型。
发明内容
针对现有技术存在的上述不足,本发明提供了一种用于洞穴三维建模的飞行器,能够在不需人类进入危险洞穴,且不受洞穴内部光线条件约束、不依靠GPS的情况下探测整个测区洞穴的空间分布情况、实现飞行器的自我空间定位并构造出目标洞穴的三维空间模型。
为解决上述技术问题,本发明采用了如下的技术方案:
一种用于洞穴三维建模的飞行器,包括飞行器主体,以及安装在飞行器主体上的舵机转动平台、激光扫描传感器、三轴加速度传感器、陀螺仪传感器、飞行器主控制器、无线数据发送模块,其中:
两个舵机转动平台分别安装在飞行器主体的上下端面;
每个舵机转动平台包括第一舵机及第二舵机,第一舵机与飞行器主体固定连接,第一舵机的第一舵机转动轴通过舵机连接臂与第二舵机连接,第二舵机通过第二舵机转动轴与激光扫描传感器连接,第一舵机转动轴与第二舵机转动轴垂直。
优选地,用于洞穴三维建模的飞行器的前端还安装有超声波传感器。
优选地,还包括安装在飞行器主体上的无线数据接收模块。
一种用于洞穴三维建模的建模方法,使用如权利要求1的用于洞穴三维建模的飞行器进行洞穴探测,包括如下步骤:
飞行器由初始位置出发,由飞行器主控制器控制飞行器向目标洞穴内飞行;
三轴加速度传感器采集加速度信号,陀螺仪传感器采集角度信号,飞行器主控制器基于加速度信号及角度信号生成飞行器的位置信息,无线数据发射模块将飞行器的位置信息发送至设置在洞穴外部的处理器;
激光扫描传感器扫描目标洞穴的切面数据,无线数据发射模块发送目标洞穴的切面数据至处理器,处理器基于切面数据及飞行器的位置信息对目标洞穴进行三维建模。
优选地,生成飞行器的位置信息的方法包括:
飞行器主控制器每隔时间段ΔT向处理器发送飞行器的位置信息,飞行器在初始位置时,设飞行器的中心点为o,正前方为x轴的正方向,正左方为y轴的正方向,正上方为z轴的正方向,飞行器的空间坐标为 在第k个时间段ΔT内飞行器沿各轴运动的空间坐标增量 因此 vx、vy、vz,分别为飞行器在x、y、z轴方向上的速度。
优选地,基于切面数据及飞行器的位置信息对目标洞穴进行三维建模的方法包括:
激光扫描传感器扫描的目标洞穴的切面数据包括切面的离散点数据,将离散点数据连续化得到封闭曲线,获得两个间隔一个时间段ΔT的封闭曲线之间的对应关系,设两个封闭曲线的时间点分别为t1和t2,t1和t2对应的封闭曲线分别为p1和p2,以t1时刻的扫描面为投影面将两条封闭曲线投影在同一坐标系下,p1在m轴和n轴投影的最小、最大坐标分别为m11、m12和n11、n12,p2在m轴和n轴投影的最小、最大坐标分别为m21、m22和n21、n22,则直线段m11m12上的任一点m1和直线段m21m22上的对应点m2的对应关系为:m1=m11+k1(m2-m21),其中 直线段n11n12上的任一点n1和直线段n21n22上的任一点n2的对应关系为:n1=n11+k2(n2-n21),其中 根据以上求出的点对应关系找出p1上的任一点(m1,n1)在p2上的对应点(m2,n2),将对应点一一相连,即能够将两个封闭曲线串联起来,将所有封闭曲线按照目标洞穴走向串联起来就能够构建出目标洞穴三维模型。
优选地,用于洞穴三维建模的飞行器的前端还安装有超声波传感器,用于洞穴三维建模的建模方法还包括:
飞行器主控制器基于激光扫描传感器扫描的切面数据及超声波传感器反馈的距离信息对洞穴内的障碍物进行躲避。
优选地,所述洞穴三维建模的飞行器还包括安装在飞行器主体上的无线数据接收模块,所述用于洞穴三维建模的建模方法还包括:
当用于洞穴三维建模的飞行器出现故障时,所述无线数据发送模块将故障信息发送至处理器,处理器接收到故障信息后,人为通过处理器向无线数据接收模块发送手动控制命令,对所述用于洞穴三维建模的飞行器进行手动控制。
综上所述,本发明公开了一种用于洞穴三维建模的飞行器,包括飞行器主体,以及安装在飞行器主体上的舵机转动平台、激光扫描传感器、三轴加速度传感器、陀螺仪传感器、飞行器主控制器、无线数据发送模块,其中:两个舵机转动平台分别安装在飞行器主体的上下端面;每个舵机转动平台包括第一舵机及第二舵机,第一舵机与飞行器主体固定连接,第一舵机的第一舵机转动轴通过舵机连接臂与第二舵机连接,第二舵机通过第二舵机转动轴与激光扫描传感器连接,第一舵机转动轴与第二舵机转动轴垂直。本发明能够在不需人类进入危险洞穴,且不受洞穴内部光线条件约束、不依靠GPS的情况下探测整个测区洞穴的空间分布情况、实现飞行器的自我空间定位并构造出目标洞穴的三维空间模型。
附图说明
为了使发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步的详细描述,其中:
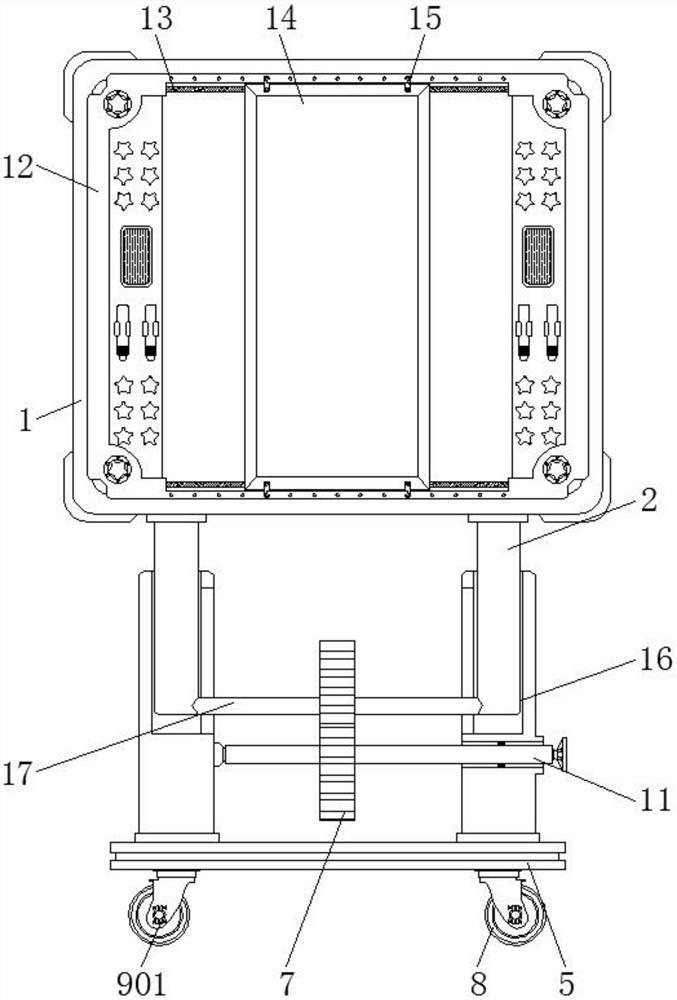
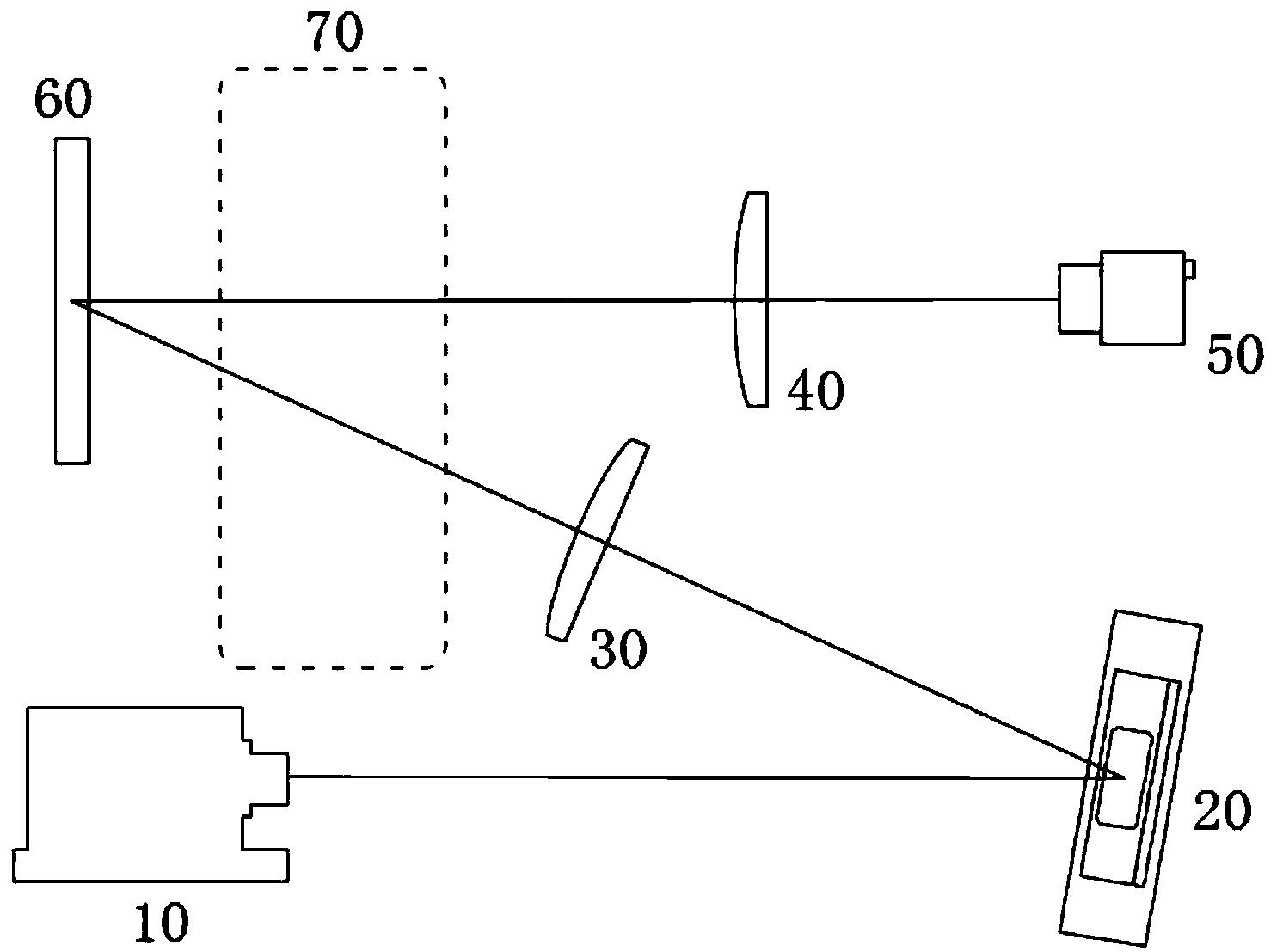
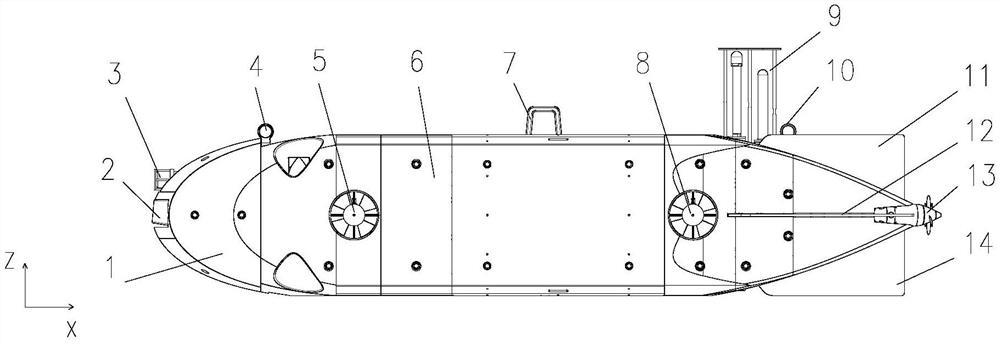
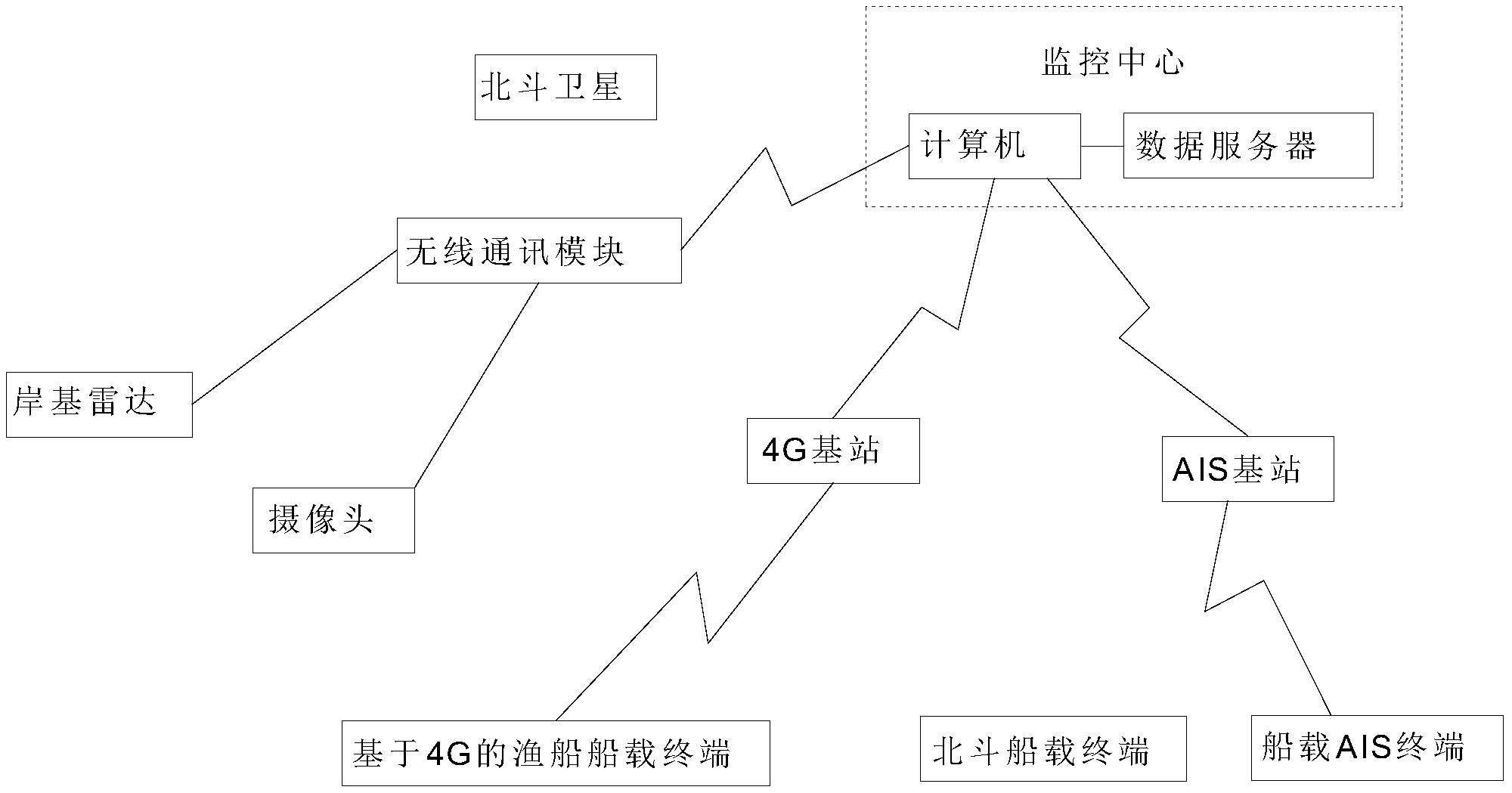
图1为本发明公开的一种用于洞穴三维建模的飞行器的结构示意图;
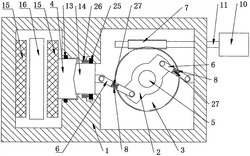
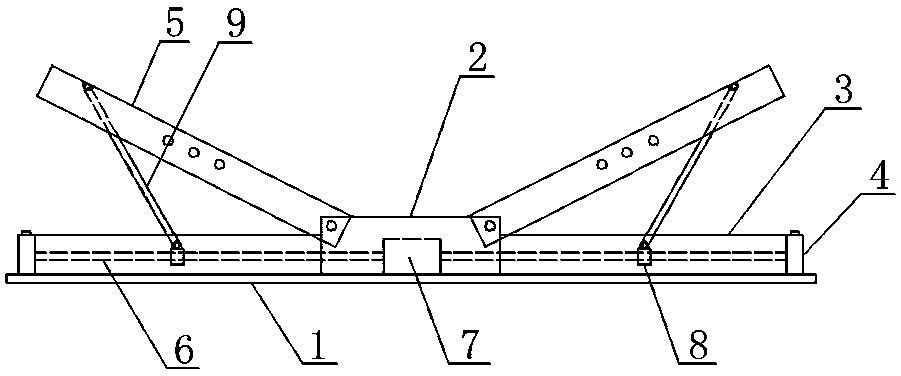
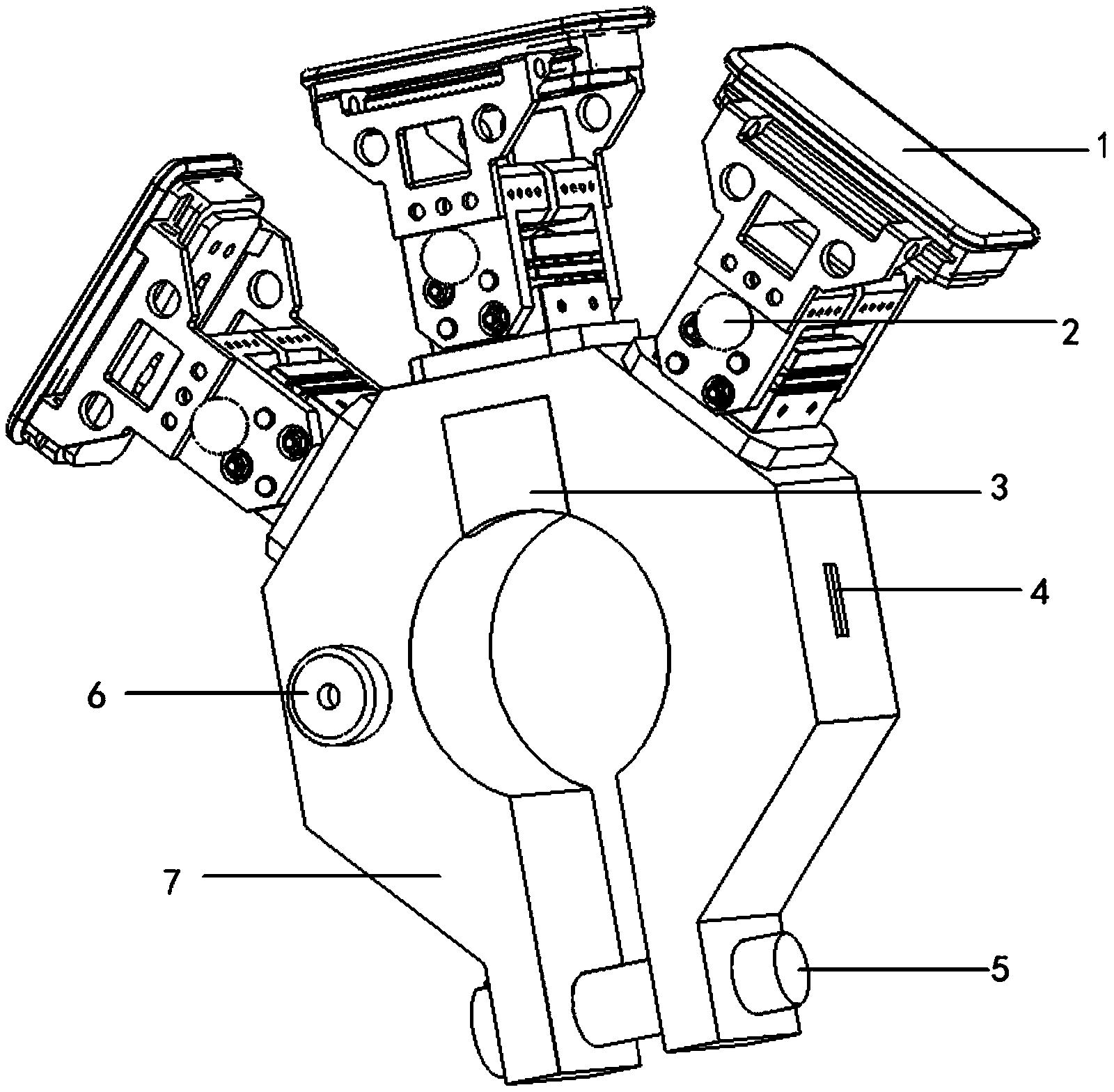
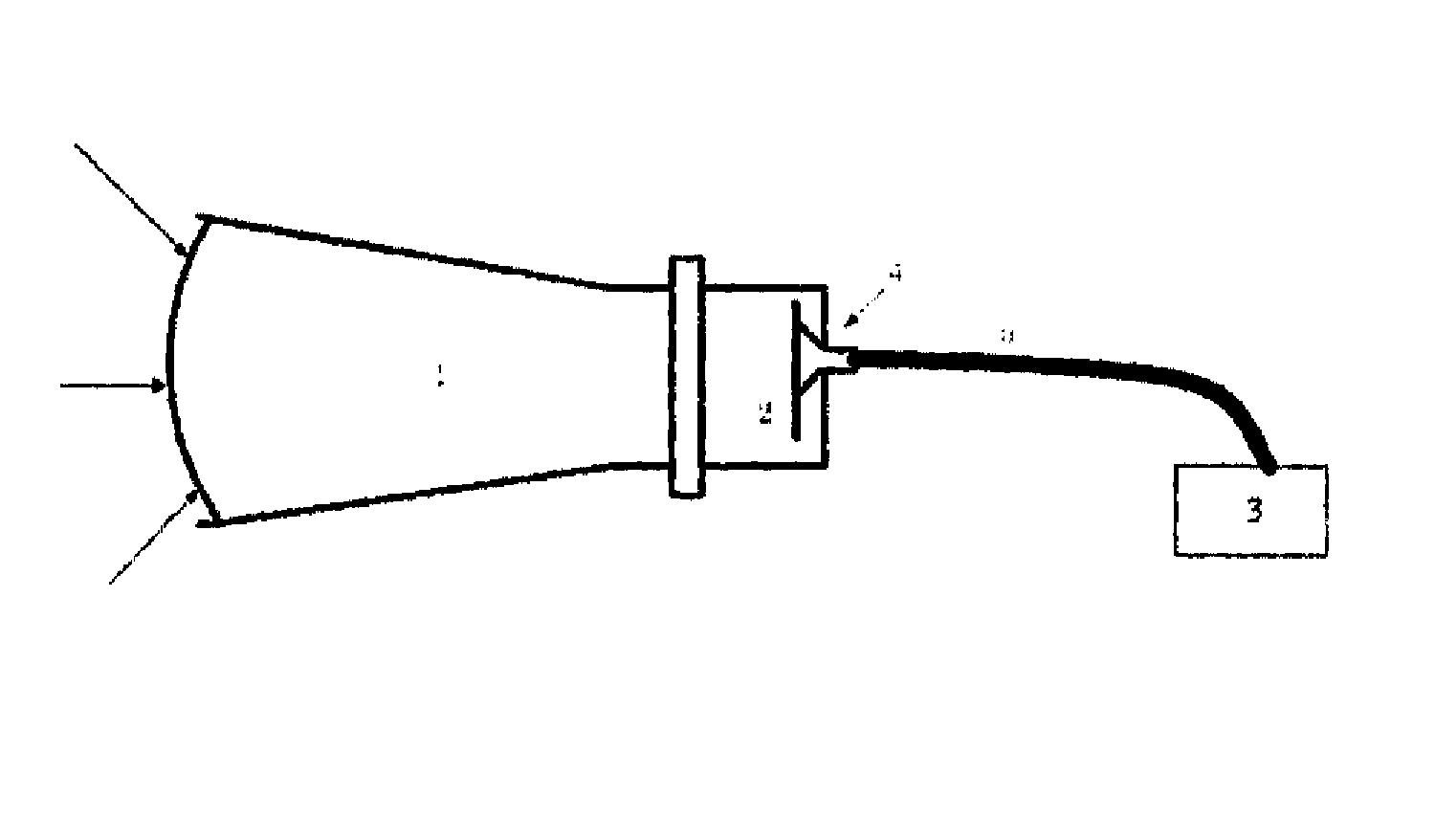
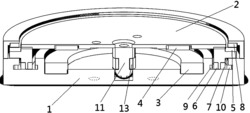
图2为本发明公开的舵机转动平台的结构示意图;
图3为飞行器的定位方法示意图;
图4为建模投影方法示意图;
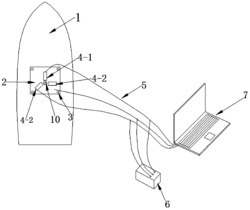
图5为洞穴三维建模示意图。
具体实施方式
下面结合附图对本发明作进一步的详细说明。
一种用于洞穴三维建模的飞行器,其特征在于,包括飞行器主体1,以及安装在飞行器主体1上的舵机转动平台2、舵激光扫描传感器3、三轴加速度传感器4、陀螺仪传感器5、飞行器主控制器7、无线数据发送模块8,其中:
两个舵机转动平台2分别安装在飞行器主体1的上下端面;
每个舵机转动平台2包括两个舵机10,两个舵机通过舵机转动轴11连接,可定义为第一舵机及第二舵机,第一舵机与飞行器主体1固定连接,第一舵机的第一舵机转动轴通过舵机连接臂12与第二舵机连接,第二舵机通过第二舵机转动轴与舵激光扫描传感器3连接,第一舵机转动轴与第二舵机转动轴垂直。
在本发明中无线数据发送模块8可采用TXD1ASK发送模块,无线数据接收模块9可采用RXB8接收模块,处理器可为PC端,每个舵激光扫描传感器3都安装在一个由舵机10组成的可转动平台上,这样可以根据飞行器的不同飞行姿态调整舵激光扫描传感器3的扫描方向,使其扫描的平面始终垂直于水平面。每个舵激光扫描传感器3的扫描角度为270度,可以通过调整舵激光扫描传感器3的扫描方向和扫描角度来保证对飞行器周围的洞穴内壁进行360度的扫描。通过舵激光扫描传感器3返回飞行器到周围洞穴内壁的距离信息。通过三轴加速度传感器4可以获得飞行器在各个方向轴的实时加速度,对加速度进行二重积分就可获得飞行器移动的距离信息,再通过陀螺仪传感器5获得飞行器的姿态角,进而通过坐标系的转换就可获得飞行器在根据出发时刻的位置所建坐标系下的三维空间坐标,实现飞行器的自我空间定位,进而就可探测到洞穴内部通道的走向。
本发明公开的用于洞穴三维建模的飞行器能够在不需人类进入危险洞穴,且不受洞穴内部光线条件约束、不依靠GPS的情况下探测整个测区洞穴的空间分布情况、实现飞行器的自我空间定位并构造出目标洞穴的三维空间模型。
具体实施时,用于洞穴三维建模的飞行器的前端还安装有超声波传感器6。
飞行器可根据舵激光扫描传感器3获得自身与周围洞穴内壁的距离,当距离小于飞行安全距离,就调整自身的飞行位置,以防止飞行器撞到洞穴内壁,飞行器的正前方安装有超声波模块用来检测前方是否有障碍物,根据反馈信息及时控制飞行器绕开障碍物。
具体实施时,还包括安装在飞行器主体1上的无线数据接收模块9。
一种用于洞穴三维建模的建模方法,其特征在于,使用如权利要求1的用于洞穴三维建模的飞行器进行洞穴探测,包括如下步骤:
飞行器由初始位置出发,由飞行器主控制器7控制飞行器向目标洞穴内飞行;
三轴加速度传感器4采集加速度信号,陀螺仪传感器5采集角度信号,飞行器主控制器7基于加速度信号及角度信号生成飞行器的位置信息,无线数据发射模块将飞行器的位置信息发送至设置在洞穴外部的处理器;
舵激光扫描传感器3扫描目标洞穴的切面数据,无线数据发射模块发送目标洞穴的切面数据至处理器,处理器基于切面数据及飞行器的位置信息对目标洞穴进行三维建模。
舵激光扫描传感器3的最大扫描角度可达270度,最大扫描距离可达20m。舵激光扫描传感器3每隔0.25度就有一束激光束,激光的功率足够强,可以在大多数的物体上反射。其输出的数据为每一束激光相对飞行器的角度和距离信息。因此,切面数据为切面的多个离散点数据,如图2所示是由舵机10组成的一个转动平台,可实现两个自由度的转动,与舵激光扫描传感器3连接,可根据飞行器的姿态转动调整舵激光扫描传感器3的扫描方向,通过两个舵激光扫描传感器3的配合就可以实现对洞穴内部通道360度的扫描,每扫描一次就获得了一串离散数据点,对这些离散数据进行连续化处理,得到一条不规则的封闭曲线,随着飞行器在洞穴通道内的运动,可以扫描出许多这种封闭曲线。
具体实施时,如图3所示,生成飞行器的位置信息的方法包括:
飞行器主控制器7每隔时间段ΔT向处理器发送飞行器的位置信息,飞行器在初始位置时,设飞行器的中心点为o,正前方为x轴的正方向,正左方为y轴的正方向,正上方为z轴的正方向,设当前时刻的飞行器的中心点为o′,当前时刻飞行器的正前方为x′轴的正方向,正左方为y′轴的正方向,正上方为z′轴的正方向,设此时飞行器沿x轴、y轴和z轴的加速度分别为ax、ay和az,沿x′轴、y′轴和z′轴的加速度分别为ax′、ay′和az′,加速度信号包括ax′、ay′和az′,角度信号包括偏航角α、滚转角β和俯仰角γ,飞行器的空间坐标为 在第k个时间段ΔT内的空间坐标增量为 其中 C=C1C2C3,C为变换矩阵,C1、C2、C3分别为变换矩阵的分量, 因此 因此 并且因为时间段ΔT很短,可将飞行器在时间段ΔT内的运动近似成匀加速直线运动,因此 vx、vy、vz,分别为飞行器在x、y、z轴方向上的速度,在第k个时间段ΔT内飞行器沿各轴的平均运动速度为 则在第k个时间段ΔT内飞行器沿各轴运动的空间坐标增量 因此
在本发明中飞行器的主控制器接收到数据后通过以下角度计算公式计算出相应的角度:
偏航角(z′轴与z轴的夹角)α=((YawH<<8)|YawL)/32768*180(°);
滚转角(x′轴与x轴的夹角)β=((RollH<<8)|RollL)/32768*180(°);
俯仰角(y′轴与y轴的夹角)γ=((PitchH<<8)|PitchL)/32768*180(°);
陀螺仪传给飞行器主控制器7的每一个角度数据包括两个字节,以偏航角α为例:YawH和YawL分别为所传数据的高字节和低字节,公式表示:将高字节左移8位后和低字节进行或运算,然后除32768再乘180,这个具体的计算不用做详细解释,只是一个数据转换公式,是这款陀螺仪传感器5资料里给的特定的数据转换公式,其它两个角度数据也是如此。
具体实施时,如图4所示,设横坐标为m,纵坐标为n,基于切面数据及飞行器的位置信息对目标洞穴进行三维建模的方法包括:
舵激光扫描传感器3扫描的目标洞穴的切面数据包括切面的离散点数据,将离散点数据连续化得到封闭曲线,获得两个间隔一个时间段ΔT的封闭曲线之间的对应关系,设两个封闭曲线的时间点分别为t1和t2,t1和t2对应的封闭曲线分别为p1和p2,以t1时刻的扫描面为投影面将两条封闭曲线投影在同一坐标系下,p1在m轴和n轴投影的最小、最大坐标分别为m11、m12和n11、n12,p2在m轴和n轴投影的最小、最大坐标分别为m21、m22和n21、n22,则直线段m11m12上的任一点m1和直线段m21m22上的对应点m2的对应关系为:m1=m11+k1(m2-m21),其中 k1是一个比例系数,它的具体的值就是根据这个公式计算的,k2也是如此。直线段n11n12上的任一点n1和直线段n21n22上的任一点n2的对应关系为:n1=n11+k2(n2-n21),其中 根据以上求出的点对应关系找出p1上的任一点(m1,n1)在p2上的对应点(m2,n2),将对应点一一相连,即能够将两个封闭曲线串联起来,将所有封闭曲线按照目标洞穴走向串联起来就能够构建出目标洞穴三维模型。
具体实施时,用于洞穴三维建模的飞行器的前端还安装有超声波传感器6,用于洞穴三维建模的建模方法还包括:
飞行器主控制器7基于舵激光扫描传感器3扫描的切面数据及超声波传感器6反馈的距离信息对洞穴内的障碍物进行躲避。
从而避免飞行器在运动过程中与洞穴内的障碍物发生碰撞,从而造成飞行器的损坏。
具体实施时,所述洞穴三维建模的飞行器还包括安装在飞行器主体1上的无线数据接收模块9,所述用于洞穴三维建模的建模方法还包括:
当用于洞穴三维建模的飞行器出现故障时,所述无线数据发送模块8将故障信息发送至处理器,处理器接收到故障信息后,人为通过处理器向无线数据接收模块9发送手动控制命令,对所述用于洞穴三维建模的飞行器进行手动控制。
因此,当飞行器出现程序故障无法自主飞行时,工作人员可通过手动操作控制飞行器返回或控制飞行器继续完成建模工作。
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管通过参照本发明的优选实施例已经对本发明进行了描述,但本领域的普通技术人员应当理解,可以在形式上和细节上对其作出各种各样的改变,而不偏离所附权利要求书所限定的本发明的精神和范围。
一种用于洞穴三维建模的飞行器及建模方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0