

IPC分类号 : G03B15/00,G03B15/06,G03B15/07,G03B9/66,G01B11/00









专利摘要
本实用新型涉及一种可自主定制的多目视觉三维近景摄影装置,包括暗箱,暗箱内顶部安装有光强可调节的发光装置,暗箱内底部安装有支撑座,支撑座顶部设有可控旋转装置,可控旋转装置上放置有目标物,目标物的上方、同一水平面和下方分别设置有三个定焦相机,三个定焦相机均连接至快门联动装置,三个定焦相机的焦距和影像规格尺寸均一致,快门联动装置与可控旋转装置连接,由可控旋转装置输出信号给快门联动装置,以控制快门联动装置的工作状态,从而控制三个定焦相机的拍照动作。与现有技术相比,本实用新型能够自主带动目标物转动,停止转动时由三个定焦相机进行同步自动拍照,以此提高工作效率和照片质量、降低相片数据冗余、减轻人力劳动。
权利要求
1.一种可自主定制的多目视觉三维近景摄影装置,其特征在于,包括暗箱(11),所述暗箱(11)内的顶部安装有光强可调节的发光装置(9),所述暗箱(11)内的底部安装有支撑座,所述支撑座的顶部设有可控旋转装置,所述可控旋转装置上放置有目标物(8),所述目标物(8)的上方、同一水平面和下方分别设置有三个定焦相机(1),三个定焦相机(1)均连接至快门(6)联动装置,三个定焦相机(1)的焦距和影像规格尺寸均一致,所述快门(6)联动装置与可控旋转装置连接,由可控旋转装置输出信号给快门(6)联动装置,以控制快门(6)联动装置的工作状态,从而控制三个定焦相机(1)的拍照动作。
2.根据权利要求1所述的一种可自主定制的多目视觉三维近景摄影装置,其特征在于,所述三个定焦相机(1)分别通过长度可调节的伸缩杆(10)连接至暗箱(11)内的顶部。
3.根据权利要求1所述的一种可自主定制的多目视觉三维近景摄影装置,其特征在于,所述可控旋转装置包括用于放置目标物(8)的旋转平台(2),所述旋转平台(2)固定安装在支撑架(7)的顶部,所述旋转平台(2)连接有第一电机(16),所述第一电机(16)的输入端连接至用于感应转动板(14)的接近开关(13),所述转动板(14)安装在控制盘(15)上,所述接近开关(13)放置于控制盘(15)的一侧,所述控制盘(15)连接有第二电机(17),第二电机(17)驱动控制盘(15)转动,带动转动板(14)发生转动,接近开关(13)感应到转动板(14)时,接近开关(13)闭合、第一电机(16)驱动旋转平台(2)转动,当接近开关(13)感应不到转动板(14)时,则接近开关(13)断开、第一电机(16)停止驱动、旋转平台(2)停止转动。
4.根据权利要求3所述的一种可自主定制的多目视觉三维近景摄影装置,其特征在于,所述第一电机(16)安装在旋转平台(2)的中心位置,所述第二电机(17)安装在控制盘(15)的中心位置。
5.根据权利要求3所述的一种可自主定制的多目视觉三维近景摄影装置,其特征在于,所述旋转平台(2)旋转一周360°的转动次数为n:
其中,θ为旋转平台(2)转动一次的转动角度,D
6.根据权利要求5所述的一种可自主定制的多目视觉三维近景摄影装置,其特征在于,所述快门(6)联动装置包括依次连接的继电器(4)、电磁铁(5)和快门(6),所述继电器(4)与接近开关(13)连接,所述快门(6)分别连接至三个定焦相机(1),接近开关(13)感应不到转动板(14)时,输出信号给继电器(4),继电器(4)闭合、电磁铁(5)运动,带动快门(6)动作,使三个定焦相机(1)同时完成拍照动作。
7.根据权利要求6所述的一种可自主定制的多目视觉三维近景摄影装置,其特征在于,位于目标物(8)上方的定焦相机(1)与目标物(8)的垂直距离为d,该定焦相机(1)的拍摄角度为该定焦相机(1)与水平面的夹角α,位于目标物(8)下方的定焦相机(1)与目标物(8)的垂直距离同样为d,该定焦相机(1)的拍摄角度为该定焦相机(1)与竖直面的夹角(90°-α),位于目标物(8)上方的定焦相机(1)与水平面的夹角α具体为:
d≤D
其中,d为位于目标物(8)上方的定焦相机(1)与目标物(8)的垂直距离,R为位于目标物(8)同一水平面的定焦相机(1)与目标物(8)的水平直线距离,D
8.根据权利要求1所述的一种可自主定制的多目视觉三维近景摄影装置,其特征在于,所述暗箱(11)具体为圆柱体结构,所述暗箱(11)的半径大于位于目标物(8)同一水平面的定焦相机(1)与目标物(8)之间的水平距离。
9.根据权利要求1所述的一种可自主定制的多目视觉三维近景摄影装置,其特征在于,所述暗箱(11)具体为长方体结构,所述暗箱(11)的宽度大于位于目标物(8)同一水平面的定焦相机(1)与目标物(8)之间的水平距离的2倍。
10.根据权利要求1所述的一种可自主定制的多目视觉三维近景摄影装置,其特征在于,所述发光装置(9)具体为环形匀光灯。
说明书
技术领域
本实用新型涉及近景摄影测量技术领域,尤其是涉及一种可自主定制的多目视觉三维近景摄影装置。
背景技术
摄影测量方法借助人眼的双眼视差,通过拍摄对象不同位置的照片,以还原解析出物体的外部空间形状,或者借助物体的显著特征点在不同图像上的差异,解算出物体摄影时相机镜头、位置等参数,并解求出图像像素的几何位置信息。
作为近景摄影测量的一大应用领域,数字近景摄影测量是利用近景摄影测量系统,对不能接近或不能进行常规直接测量的被摄物体的空间姿态的真实再现,是利用像片进行三维空间测量的一种重要技术手段。超近摄影测量则是指对物距在0.1~0.01m的目标物进行的摄影测量,常用于处理小型文物、外形复杂的机械零件及小型物体的变形量测等。
传统的超近摄影测量仪器大多采用多倍仪,利用多倍仪的投影器作为摄影机,但是多倍仪对物体长宽高有限制,且工作条件差,需要人长时间在暗房内作业,工作程序繁琐耗时,投影器分辨率低,导致后续无法逼真地建立三维模型。
此外,现有技术还采用相机的方式,并在被测目标上布设控制点,以待拍物为圆心,从上、中、下分别环绕待拍物三圈,每圈拍摄15-30张相片,使相邻照片间有较大的覆盖率,通过控制合适半径,移动脚架进行拍摄,然后根据相片获取目标物的数字模型。在实际拍摄过程中,为了提高建模精度、减少在三维建模过程中的后期工作量,需要确保待拍物在充足均匀的灯光下,每次脚架的移动角度与移动半径基本不变,按下快门进行拍摄,全过程耗时费力、效率低下,且相片张数过多时会造成数据冗余,数据量大、建模耗时长;相片张数过少时会导致相邻相片间同名点较少,无法构建精确的三维模型。
实用新型内容
本实用新型的目的就是为了克服上述现有技术存在的缺陷而提供一种可自主定制的多目视觉三维近景摄影装置,能够在充足均匀的光线下实现多相机同步自动对目标物进行相片拍摄,并能自主控制拍摄相片的数量以及拍摄角度。
本实用新型的目的可以通过以下技术方案来实现:一种可自主定制的多目视觉三维近景摄影装置,包括暗箱,所述暗箱内的顶部安装有光强可调节的发光装置,所述暗箱内的底部安装有支撑座,所述支撑座的顶部设有可控旋转装置,所述可控旋转装置上放置有目标物,所述目标物的上方、同一水平面和下方分别设置有三个定焦相机,三个定焦相机均连接至快门联动装置,三个定焦相机的焦距和影像规格尺寸均一致,所述快门联动装置与可控旋转装置连接,由可控旋转装置输出信号给快门联动装置,以控制快门联动装置的工作状态,从而控制三个定焦相机的拍照动作。
进一步地,所述三个定焦相机分别通过长度可调节的伸缩杆连接至暗箱内的顶部。
进一步地,所述可控旋转装置包括用于放置目标物的旋转平台,所述旋转平台固定安装在支撑架的顶部,所述旋转平台连接有第一电机,所述第一电机的输入端连接至用于感应转动板的接近开关,所述转动板安装在控制盘上,所述接近开关放置于控制盘的一侧,所述控制盘连接有第二电机,第二电机驱动控制盘转动,带动转动板发生转动,接近开关感应到转动板时,接近开关闭合、第一电机驱动旋转平台转动,当接近开关感应不到转动板时,则接近开关断开、第一电机停止驱动、旋转平台停止转动。
进一步地,所述第一电机安装在旋转平台的中心位置,所述第二电机安装在控制盘的中心位置。
进一步地,所述旋转平台旋转一周360°的转动次数为n:
其中,θ为旋转平台转动一次的转动角度,Dx为定焦相机的拍照纵向间隔,R为位于目标物同一水平面的定焦相机与目标物的水平直线距离,Px%为定焦相机的照片纵向重叠度,fovx为定焦相机的水平视场角,x为定焦相机的影像水平尺寸,f为定焦相机的焦距。
进一步地,所述快门联动装置包括依次连接的继电器、电磁铁和快门,所述继电器与接近开关连接,所述快门分别连接至三个定焦相机,接近开关感应不到转动板时,输出信号给继电器,继电器闭合、电磁铁运动,带动快门动作,使三个定焦相机同时完成拍照动作。
进一步地,位于目标物上方的定焦相机与目标物的垂直距离为d,该定焦相机的拍摄角度为该定焦相机与水平面的夹角α,位于目标物下方的定焦相机与目标物的垂直距离同样为d,该定焦相机的拍摄角度为该定焦相机与竖直面的夹角(90°-α),位于目标物上方的定焦相机与水平面的夹角α具体为:
d≤Dy
其中,d为位于目标物上方的定焦相机与目标物的垂直距离,R为位于目标物同一水平面的定焦相机与目标物的水平直线距离,Dy为定焦相机的拍照旁向间隔,Py%为定焦相机的照片旁向重叠度,fovy为定焦相机的垂直视场角,y为定焦相机的影像垂直尺寸。
进一步地,所述暗箱具体为圆柱体结构,所述暗箱的半径大于位于目标物同一水平面的定焦相机与目标物之间的水平距离。
进一步地,所述暗箱具体为长方体结构,所述暗箱的宽度大于位于目标物同一水平面的定焦相机与目标物之间的水平距离的2倍。
进一步地,所述发光装置具体为环形匀光灯。
与现有技术相比,本实用新型具有以下优点:
一、本实用新型通过设置可控旋转装置,使得目标物能够按照预设的转动次数和转动角度,自动完成旋转一周的动作,并在目标物上方、同一水平面和下方分别设置三个定焦相机,且三个定焦相机的拍照动作均由快门联动装置进行控制,以完成自动拍照,相比于传统采用相机从目标物上、中、下分别环绕目标物拍照的方式,本实用新型能够实现多相机同步自动对目标物进行照片环绕拍摄的目的,具有效率高、拍摄可控的优点。
二、本实用新型通过设置封闭式的暗箱,并在暗箱顶部安装光强可调节的发光装置,根据位于目标物同一水平面的定焦相机与目标物之间的水平距离设计暗箱的尺寸,能够保证良好的拍摄环境,从而保证照片的拍摄质量。
三、本实用新型基于定焦相机自身的焦距以及影像规格数据,能够计算调整定焦相机的拍摄角度,基于拍摄照片的数量要求,能够计算调整三个定焦相机相对于目标物的安装位置以及设计可控旋转装置,以此实现本实用新型装置的自主可控性,具有可定制的特点,能够很好地适用于不同目标物的拍摄要求。
附图说明
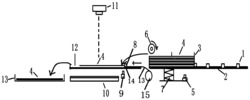
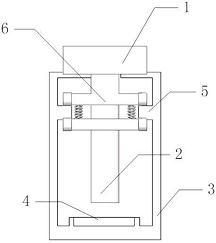
图1为本实用新型的透视结构示意图;
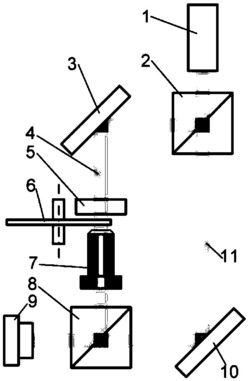
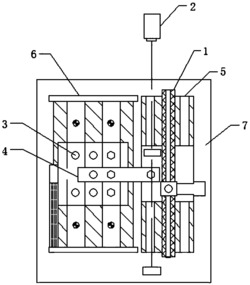
图2为可控旋转装置的结构示意图;
图3为拍摄照片的纵向重叠度和横向重叠度示意图;
图4为拍摄照片的相邻间隔示意图;
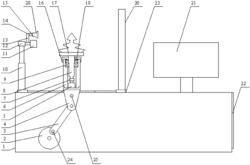
图5为本实用新型暗箱内的右视结构示意图;
图中标记说明:1、定焦相机,2、旋转平台,3、目标物虚拟外接球,4、继电器,5、电磁铁,6、快门,7、支撑架,8、目标物,9、发光装置,10、伸缩杆,11、暗箱,12、连接线,13、接近开关,14、转动板,15、控制盘,16、第一电机,17、第二电机。
具体实施方式
下面结合附图和具体实施例对本实用新型进行详细说明。
实施例
如图1所示,一种可自主定制的多目视觉三维近景摄影装置,包括暗箱11,暗箱11内的顶部安装有发光装置9,发光装置9的光强可调节,以保证良好的拍摄光线,暗箱11的顶部还安装有三个伸缩杆10,三个伸缩杆10之间的夹角为120°,三个伸缩杆10的末端分别连接有三个定焦相机1,三个定焦相机1通过连接线12与快门6连接,快门6则依次与电磁铁5、继电器4相连接,继电器4连接至接近开关13,接近开关13位于控制盘15的一侧,暗箱11内的底部设有支撑架7,支撑架7顶部安装有旋转平台2,目标物8放置在旋转平台2上,旋转平台2同样与接近开关13连接,图1中还给出了目标物8的虚拟外接球3,三个定焦相机1分别位于目标物8的上方、同一水平面和下方。
具体的,如图2所示,旋转平台2的中心位置安装有第一电机16,第一电机16与接近开关13连接,控制盘15的中心位置安装有第二电机17,控制盘15上还安装有转动板14,第二电机17按照设定的转速运动,带动控制盘15上的转动板14发生转动,当接近开关13感应到转动板14时,则接近开关13闭合、第一电机16运转带动旋转平台2转动,使目标物8发生转动;当接近开关13感应不到转动板14时,则接近开关13断开、第一电机16停止运转,目标物8停止在当前位置;当接近开关13感应不到转动板14时,输出信号给继电器4,继电器4控制电磁铁5运动,带动快门6动作,使三个定焦相机1完成同步拍照,本实施例中,第一电机16和第二电机17均选用伺服电机。
在实际应用中,以暗箱11采用圆柱体结构为例,构建本实用新型装置的具体过程为:
步骤一、考虑到超近摄影测量中目标物体型较小,因此需要实现获知目标物虚拟外接球的半径r、照片纵向重叠度Px%和照片旁向重叠度Py%,通常纵向重叠度Px%≥60%,旁向重叠度Py%≥30%,如图3所示,相片1与相片2的关系为同一个相机拍摄的相邻两张照片,纵向重叠度为Px%,相片1和相片3为同一竖直方向上两个相机拍摄的照片,旁向重叠度为Py%。
步骤二、获取定焦相机的镜头焦距f、影像规格x(mm)(水平)*y(mm)(垂直),以计算出相机水平视场角fovx与垂直视场角fovy:
再根据相机水平视场角fovx与垂直视场角fovy,计算出拍照的旁向间隔和纵向间隔,如图4所示,其中纵向间隔的计算公式为:
旁向间隔的计算公式为:
其中,R为位于目标物同一水平面的定焦相机与目标物的水平直线距离。
步骤三、三个定焦相机从上至下命名为A、B、C,与目标物呈上中下方位,A位于目标物上方,B与目标物处于同一水平面,C位于目标物下方,B与目标物的水平直线距离为R,R的长度计算公式为:
即有R的最小长度为
步骤四、如图5所示,A与B相对于目标物的垂直距离均为d,以目标物虚拟外接球的球心为原点,以竖直向下为正方向建立一维坐标系,可以得到相机视场角范围,设B的视场角与目标物上方交点坐标为y1、视场角与目标物下方交点坐标为y2:
Δy=y2-y1
步骤五、设A的方向与水平方向夹角为α,其视场角与目标物上方交点坐标为y3,视场角与目标物下方交点坐标为y4:
y3=y2-Δy*Py%
步骤六、C与A同理,沿水平面呈轴对称分布,C与水平方向夹角为α。
步骤七、本方案中,在确保建模可行性的情况下,相机拍摄的相片数量越少,建模效率越高,目标物旋转一周360°总共需要转动的次数为n,每次转动的角度为θ:
完成上述步骤后,即可设定好第一电机和第二电机的转速、安装好三个定焦相机的具体位置,此外,暗箱的半径同样需设置为大于R,若暗箱采用长方体结构,则暗箱的宽度需设置为大于2*R。
本实施例中,发光装置9选用环形匀光灯,定焦相机选用标准镜头50mm定焦全画幅相机,其影像规格为36mm*24mm,取纵向重叠度fovx=40%,经计算得n=21.74,为使得n为360°的因数,取n=24:
设定旋转平台2和控制盘15的转速为2.5r/min,每转动15°用时1秒,分别由第一电机16和第二电机18带动运转,旋转平台2每次旋转15°,同时间隔60°在控制盘15上安装一块夹角为15°的转动板14,接近开关13在感应到转动板14时被触发,驱动旋转平台2开始转动,旋转平台2每次旋转15°,旋转一次用时1秒;接近开关13在感应不到转动板14时关闭,旋转平台2停止转动,停止一次用时4秒,以便拍摄时目标物8处于静止状态。
接近开关13感应不到转动板14时,发送信号给继电器4,继电器4控制电磁铁5运动,从而带动快门6打开,三个定焦相机1同步拍照,拍照结束后,旋转平台2继续转动,完成一个目标物的数据采集共耗时120秒,共拍摄72张相片。
最后将相片导出后,利用三维建模软件进行批量自动建模,即可得到高精度三维模型。
综上所述,本实用新型提出的多目视觉三维近景摄影装置,提供了一种拍摄环境,该拍摄环境下包括拍摄单元、可控旋转装置和快门联动装置,其中,拍摄环境由发光装置和暗箱组成,拍摄单元由三个位于目标物上方、同一水平面和下方的定焦相机及对应伸缩杆组成,可控旋转装置由旋转平台、第一电机、接近开关、控制盘、第二电机和转动板组成,快门联动装置则由继电器、电磁铁和快门组成,本实用新型通过自主计算调整设定拍摄照片的数量以及相机方位角,能够在充足均匀的光线下多相机同步自动对体积较小的目标物进行照片拍摄,不仅能有效提高效率、降低照片数据冗余,同时能保证拍摄照片的质量。
一种可自主定制的多目视觉三维近景摄影装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0