











专利摘要
一种空间相机图像对时信息生成系统,涉及一种空间相机,解决现有方法存在的相机时间同步误差偏大且随相机控制器的工作时序而大幅变化、不能使用高精度时标和平台时标对时等问题。由异步串行通信接口芯片、GPS秒脉冲电平转换芯片、帧/行同步电平转换芯片、晶振和图像对时信息生成FPGA组成,使用状态机处理高精度时标与平台时标,以纯硬件时序电路的方式生成图像对时信息数据,通过两次锁存保证图像对时信息中行号和时间码的对应关系准确可靠。本发明可以达到更高的相机时间同步精度,当GPS系统及其相关接收设备故障时,能够自守时并使用平台时标对时,保证生成的图像对时信息仍能维持一定的精度。
权利要求
1.一种空间相机图像对时信息生成系统,该系统包括异步串行通信接口芯片(10)、GPS秒脉冲电平转换芯片(20)、帧/行同步电平转换芯片(30)、晶振(40)和图像对时信息生成FPGA(50);其特征是,
空间相机的相机控制器通过异步串行通信接口芯片(10)传送高精度时标、平台时标和轮询对时信息指令至图像对时信息生成FPGA(50);
所述图像对时信息生成FPGA(50)在收到轮询对时信息指令后通过异步串行通信接口芯片(10)发送锁存后的图像对时信息至相机控制器;对收到的高精度时标或平台时标进行处理并通过异步串行通信接口芯片(10)发送应答数据帧至相机控制器;
所述GPS秒脉冲电平转换芯片(20)用于将GPS接收机发送的GPS秒脉冲信号由长距离传输所用的差分电平转换为TTL电平后传送至图像对时信息生成FPGA(50);
所述帧/行同步电平转换芯片(30)用于将成像单元发送的帧/行同步信号由差分电平转换为TTL电平后传送至图像对时信息生成FPGA(50);
所述晶振(40)用于产生稳定的时钟信号,同时将时钟信号传送至图像对时信息生成FPGA(50);
所述的图像对时信息生成FPGA(50)包括串行通信模块(51)、状态控制模块(52)、时间建立与同步模块(53)、行/帧计数模块(54)和图像对时信息锁存模块(55);
所述串行通信模块(51)用于通过异步串行通信接口芯片(10)与相机控制器进行异步串行通信;从异步串行通信接口芯片(10)接收数据和指令,经串并转换后传送至状态控制模块(52);将状态控制模块(52)返回的锁存后的图像对时信息或应答数据帧进行并串转换后发送到异步串行通信接口芯片(10);
所述状态控制模块(52)通过有限状态机对从串行通信模块(51)接收到的数据和指令进行处理;当收到的为高精度时标数据时,将时间建立与同步模块(53)中当前秒计数器值设置为高精度时标数据中对应的秒值,之后发送应答数据帧;当收到的为平台时标数据时,将时间建立与同步模块(53)中当前秒计数器值设置为平台时标数据中对应的秒值,将时间建立与同步模块(53)中当前微秒计数器值设置为平台时标数据中对应的微秒值,之后发送应答数据帧;当收到的为轮询对时信息指令时,产生锁存图像对时信息信号送至图像对时信息锁存模块(55),将图像对时信息锁存模块(55)中锁存后的图像对时信息经串行通信模块(51)发送至异步串行通信接口芯片(10);
所述时间建立与同步模块(53)从晶振(40)接收时钟信号,经过分频后进行计数得到当前微秒计数器值;从GPS秒脉冲电平转换芯片(20)接收GPS秒脉冲信号,对GPS秒脉冲信号进行计数得到当前秒计数器值,当检测到GPS秒脉冲信号的下降沿时将当前微秒计数器值设置为0;在当前微秒计数器值为2000000时将当前秒计数器值加2,并将当前微秒计数器值设置为0;
所述行/帧计数模块(54)从帧/行同步电平转换芯片(30)接收帧/行同步信号,当检测到帧/行同步信号的上升沿时将当前行/帧计数器值加1,在系统上电复位时将当前行/帧计数器值设置为0;
所述图像对时信息锁存模块(55)从行/帧计数模块(54)接收帧/行同步信号和当前行/帧计数器值,从时间建立与同步模块(53)接收当前秒计数器值和当前微秒计数器值,从状态控制模块(52)接收锁存图像对时信息信号;所述图像对时信息锁存模块(55)将帧/行同步信号延迟一个时钟周期后,使用延迟后信号的上升沿锁存当前行/帧计数器值、当前秒计数器值和当前微秒计数器值,锁存后的结果存入图像对时信息缓存中;使用从状态控制模块(52)接收到的锁存图像对时信息信号的上升沿对图像对时信息缓存再次进行锁存,得到锁存后的图像对时信息。
2.根据权利要求1所述的空间相机图像对时信息生成系统,其特征在于,所述状态控制模块(52)通过主状态机和信息处理状态机两个有限状态机实现:所述主状态机包括初始态(521)、接收态(522)、处理态(523)、判断态(524)、发送对时信息态(525)和发送应答帧态(526)六个状态;所述信息处理状态机包括解析态(5231)、处理结束态(5232)、轮询对时信息态(5233)、处理平台时标态(5234)和处理高精度时标态(5235)五个状态;
所述主状态机的状态转移过程为:当上电或复位信号为高电平时,进入初始态(521),当复位信号为低电平,由初始态(521)切换到接收态(522);当串行通信模块(51)接收完一帧数据时,由接收态(522)切换到处理态(523),当信息处理状态机的当前状态为处理结束态(5232)时主状态机由处理态(523)切换到判断态(524);在判断态(524)对收到的串行通信数据的类型进行判断,当收到的为轮询对时信息指令时,由判断态(524)切换到发送对时信息态(525),通过串行通讯总线发送锁存后的图像对时信息,发送完毕后由发送对时信息态(525)切换到接收态(522);当收到的为高精度时标或平台时标时,由判断态(524)切换到发送应答帧态(526),通过串行通讯总线发送应答数据帧,发送完毕后由发送应答帧态(526)切换到接收态(522);当收到的数据为错误数据时由判断态(524)切换到接收态(522);在复位信号为高电平时,不论主状态机在哪个状态,都切换为初始态(521);
所述信息处理状态机的状态转移过程:上电或系统复位时,信息处理状态机进入解析态(5231);当主状态机为处理态(523)而信息处理状态机当前状态为解析态(5231)时,对收到的串行通信数据的类型进行判断;当收到的为轮询对时信息指令时,信息处理状态机由解析态(5231)切换为轮询对时信息态(5233);当收到的为高精度时标时,由解析态(5231)切换为处理高精度时标态(5235),在该状态将时间建立与同步模块(53)中当前秒计数器值设置为高精度时标数据中对应的秒值;当收到的为平台时标时,由解析态(5231)切换为处理平台时标态(5234),在该状态将时间建立与同步模块(53)中当前秒计数器值设置为平台时标数据中对应的秒值,将时间建立与同步模块(53)中当前微秒计数器值设置为平台时标数据中对应的微秒值;当主状态机为处理态(523),而信息处理状态机当前状态为处理高精度时标态(5235)、处理平台时标态(5234)或者轮询对时信息态(5233)时,信息处理状态机切换到处理结束态(5232);当主状态机为处理态(523),而信息处理状态机当前状态为处理结束态(5232)时,信息处理状态机切换到解析态(5231);当主状态机的当前状态不为处理态(523)时,信息处理状态机切换为解析态(5231)。
3.根据权利要求1或2所述的空间相机图像对时信息生成系统,其特征在于,锁存图像对时信息信号的产生过程为,当主状态机为初始态(521)时将锁存图像对时信息信号设置为低电平,当信息处理状态机为轮询对时信息态(5233)且锁存图像对时信息信号为低电平时将锁存图像对时信息信号设置为高电平,当信息处理状态机为处理结束态(5232)时将锁存图像对时信息信号设置为低电平。
说明书
技术领域
本发明一般涉及空间相机,且更具体的说,涉及空间相机的图像对时信息生成系统。
技术背景
空间相机包括对地观测的侦察相机、空间立体测绘相机和对恒星观测的星相机。空间相机以航天器为观测平台,由于航天器在飞行过程中位置和姿态不断变化,如果无法保证相机的时间和航天器平台以及航天器其他单元同步,就难以达到要求的平面定位精度、高程精度或姿态测量精度。
空间相机在摄影过程中要采集图像对时信息,图像对时信息包括图像的行/帧号,以及该行/帧图像曝光起始时刻对应的时间码,时间码由秒值和微秒值组成,其中秒值为当前时间相对于计时时间基准(如2006年1月1日0时0分0秒)经历的秒值数。空间相机的时间同步误差是图像对时信息中记录的某一行/帧图像的时间和曝光起始时刻的真实时间(以时间同步源即GPS接收机时间系统为基准)的差值。当空间相机的成像单元采用线阵CCD时,返回行同步信号,当采用面阵CCD时返回帧同步信号,行同步信号或帧同步信号的边沿代表曝光起始时刻。
由于空间相机控制器除了建立高精度的时间系统外,同时要完成复杂的像移速度计算、偏流角调整、与数管计算机通讯、控制成像单元和调焦等多项任务,通常以数字信号处理器(Digital Signal Processor,DSP)为核心单元,通过外接计数器的方式,以软件的方式完成图像对时信息的生成(武星星,刘金国.三线阵立体测绘相机时间系统优化与实时检测.光学精密工程,2012,20(5):1020-1030)。由于相机控制器以软件的方式来采集图像对时信息,而且要完成多项复杂任务,一方面开关中断过程会引入较大的时间同步误差,另一方面软件在执行过程中取指、译码等操作也会带来额外的时间同步误差,导致相机时间同步误差偏大且随相机控制器的工作时序的变化而存在较大的波动。
发明人曾提出一种空间立体测绘相机时间同步精度全程实时检测系统和方法(专利公开号:CN102735263A),在该系统中使用FPGA对时单元接收行/帧同步信号和秒脉冲信号,产生FPGA对时数据作为基准数据,用于空间相机时间同步误差的地面测量和评价。但是在该方案中FPGA对时单元不能接受和处理高精度时标与平台时标,由于图像对时信息中的秒值为当前时间相对于计时时间基准经历的秒值数,空间相机需要使用高精度时标或平台时标进行对时才能得到正确的图像对时信息,因此该方案只能在GPS仿真设备的协助下用于空间相机时间同步精度的地面测量和评价,不能用于空间相机在轨工作过程中的图像对时信息生成。
由于空间相机图像对时信息采集的准确性直接影响到空间相机的平面定位精度、高程精度或姿态测量精度,当GPS系统及其相关接收设备相关设备由于空间环境等因素而无法正常工作,不能提供高精度时标和GPS秒脉冲时,要求空间相机能够自守时并使用平台时标对时,保证采集的图像对时信息仍能维持一定的精度,上述方案不能满足这一要求。
发明内容
本发明针对空间相机的平面定位精度、高程精度或姿态测量精度受相机时间同步精度的影响,而现有方法存在相机时间同步误差偏大且随相机控制器的工作时序而大幅变化、不能使用高精度时标和平台时标对时等问题,提供一种空间相机图像对时信息生成系统。
一种空间相机图像对时信息生成系统,该系统包括异步串行通信接口芯片、GPS秒脉冲电平转换芯片、帧/行同步电平转换芯片、晶振和图像对时信息生成FPGA;
空间相机的相机控制器通过异步串行通信接口芯片传送高精度时标、平台时标和轮询对时信息指令至图像对时信息生成FPGA;
所述图像对时信息生成FPGA在收到轮询对时信息指令后通过异步串行通信接口芯片发送锁存后的图像对时信息至相机控制器;对收到的高精度时标或平台时标进行处理并通过异步串行通信接口芯片发送应答数据帧至相机控制器;
所述GPS秒脉冲电平转换芯片用于将GPS接收机发送的GPS秒脉冲信号由长距离传输所用的差分电平转换为TTL电平后传送至图像对时信息生成FPGA;
所述帧/行同步电平转换芯片用于将成像单元发送的帧/行同步信号由差分电平转换为TTL电平后传送至图像对时信息生成FPGA;
所述晶振用于产生稳定的时钟信号,同时将时钟信号传送至图像对时信息生成FPGA;
所述的图像对时信息生成FPGA包括串行通信模块、状态控制模块、时间建立与同步模块、行/帧计数模块和图像对时信息锁存模块;
所述串行通信模块用于通过异步串行通信接口芯片与相机控制器进行异步串行通信;从异步串行通信接口芯片接收数据和指令,经串并转换后传送至状态控制模块;将状态控制模块返回的锁存后的图像对时信息或应答数据帧进行并串转换后发送到异步串行通信接口芯片;
所述状态控制模块通过有限状态机对从串行通信模块接收到的数据和指令进行处理;当收到的为高精度时标数据时,将时间建立与同步模块中当前秒计数器值设置为高精度时标数据中对应的秒值,之后发送应答数据帧;当收到的为平台时标数据时,将时间建立与同步模块中当前秒计数器值设置为平台时标数据中对应的秒值,将时间建立与同步模块中当前微秒计数器值设置为平台时标数据中对应的微秒值,之后发送应答数据帧;当收到的为轮询对时信息指令时,产生锁存图像对时信息信号送至图像对时信息锁存模块,将图像对时信息锁存模块中锁存后的图像对时信息经串行通信模块发送至异步串行通信接口芯片;
所述时间建立与同步模块从晶振接收时钟信号,经过分频后进行计数得到当前微秒计数器值;从GPS秒脉冲电平转换芯片接收GPS秒脉冲信号,对GPS秒脉冲信号进行计数得到当前秒计数器值,当检测到GPS秒脉冲信号的下降沿时将当前微秒计数器值设置为0;在当前微秒计数器值为2000000时将当前秒计数器值加2,并将当前微秒计数器值设置为0;
所述行/帧计数模块从帧/行同步电平转换芯片接收帧/行同步信号,当检测到帧/行同步信号的上升沿时将当前行/帧计数器值加1,在系统上电复位时将当前行/帧计数器值设置为0;
所述图像对时信息锁存模块从行/帧计数模块接收帧/行同步信号和当前行/帧计数器值,从时间建立与同步模块接收当前秒计数器值和当前微秒计数器值,从状态控制模块接收锁存图像对时信息信号;所述图像对时信息锁存模块将帧/行同步信号延迟一个时钟周期后,使用延迟后信号的上升沿锁存当前行/帧计数器值、当前秒计数器值和当前微秒计数器值,锁存后的结果存入图像对时信息缓存中;使用从状态控制模块接收到的锁存图像对时信息信号的上升沿对图像对时信息缓存再次进行锁存,得到锁存后的图像对时信息。
本发明的有益效果:
一、本发明以纯硬件时序电路的方式守时、对时和生成图像对时信息数据,不会在开关中断过程引入时间同步误差,也没有软件在执行过程取指、译码等带来的相机时间同步误差,可以达到更高的相机时间同步精度,且相机时间同步精度不会随相机控制器时序变化而大幅波动。
二、本发明所述的图像对时信息生成FPGA通过有限状态机处理高精度时标与平台时标并进行对时,避免现有方案无法处理高精度时标与平台时标,从而导致无法用于空间相机在轨工作过程中的图像对时信息生成的问题。当GPS系统及其相关接收设备故障时,能够自守时并使用平台时标对时,保证生成的图像对时信息仍能维持一定的精度。
三、本发明通过行/帧同步信号和锁存图像对时信息信号对行号和对应的时间码进行两次锁存,从而保证从异步串行总线传回相机控制器的图像对时信息中行号和时间码的对应关系准确可靠。
附图说明
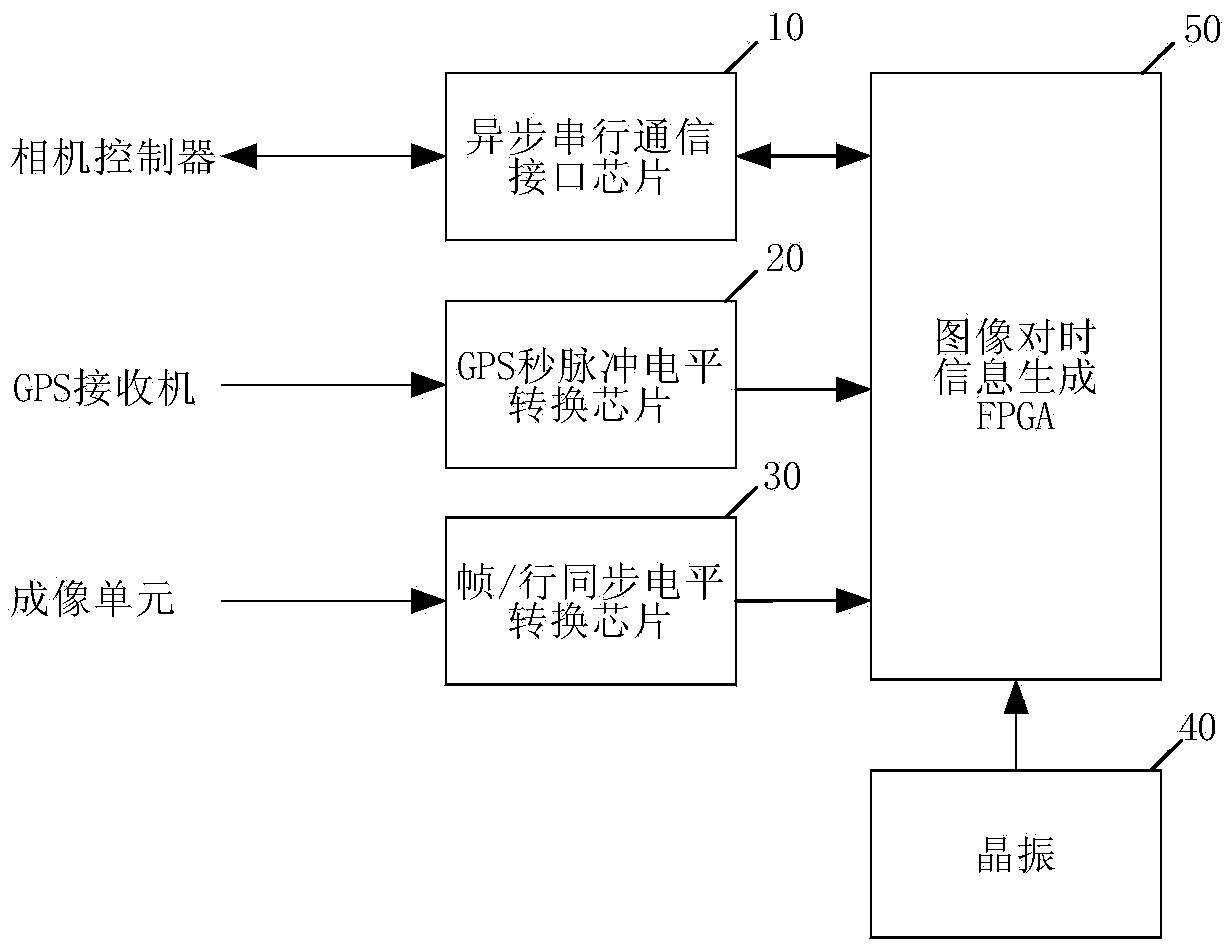
图1为本发明所述空间相机图像对时信息生成系统结构图;
图2为本发明所述空间相机图像对时信息生成系统中图像对时信息生成FPGA的组成原理图;
图3为本发明所述空间相机图像对时信息生成系统中状态控制模块主状态机的状态转移图;
图4为本发明所述空间相机图像对时信息生成系统中状态控制模块信息处理状态机的状态转移图;
具体实施方式
具体实施方式一、结合图1至图4说明本实施方式,空间相机图像对时信息生成系统,包括异步串行通信接口芯片10、GPS秒脉冲电平转换芯片20、帧/行同步电平转换芯片30、晶振40和图像对时信息生成FPGA50;空间相机的相机控制器通过异步串行通信接口芯片10发送高精度时标、平台时标和轮询对时信息指令至图像对时信息生成FPGA50;图像对时信息生成FPGA50在收到轮询对时信息指令后通过异步串行通信接口芯片10发送锁存后的图像对时信息至相机控制器;图像对时信息生成FPGA50在收到高精度时标或平台时标后,进行处理并通过异步串行通信接口芯片10发送应答数据帧至相机控制器。
GPS秒脉冲电平转换芯片20:用于将GPS接收机发送的GPS秒脉冲信号由长距离传输所用的差分电平转换为TTL电平后送至图像对时信息生成FPGA50。
帧/行同步电平转换芯片30:用于将成像单元发送的帧/行同步信号由差分电平转换为TTL电平后送至图像对时信息生成FPGA50。
晶振40:用于产生稳定的时钟信号,同时将时钟信号传送至图像对时信息生成FPGA50。
其中图像对时信息生成FPGA50包含如下模块:
所述串行通信模块51用于通过异步串行通信接口芯片10与相机控制器进行异步串行通信;从异步串行通信接口芯片接收数据和指令,经串并转换后传送至状态控制模块;将状态控制模块返回的锁存后的图像对时信息或应答数据帧进行并串转换后发送到异步串行通信接口芯片10;
状态控制模块52:通过有限状态机对从串行通信模块51接收到的数据和指令进行处理;当收到的为高精度时标数据时,将时间建立与同步模块53中当前秒计数器值设置为高精度时标数据中对应的秒值,之后发送应答数据帧;当收到的为平台时标数据时,将时间建立与同步模块53中当前秒计数器值设置为平台时标数据中对应的秒值,将时间建立与同步模块53中当前微秒计数器值设置为平台时标数据中对应的微秒值,之后发送应答数据帧;当收到的为轮询对时信息指令时,产生锁存图像对时信息信号送至图像对时信息锁存模块55,将图像对时信息锁存模块55中锁存后的图像对时信息经串行通信模块51发送至异步串行通信接口芯片10。
时间建立与同步模块53:从晶振40接收时钟信号,经过分频后进行计数得到当前微秒计数器值;从GPS秒脉冲电平转换芯片20接收GPS秒脉冲信号,对GPS秒脉冲信号进行计数得到当前秒计数器值,当检测到GPS秒脉冲信号的下降沿时将当前微秒计数器值设置为0;在当前微秒计数器值为2000000时将当前秒计数器值加2,并将当前微秒计数器值设置为0。
行/帧计数模块54:从帧/行同步电平转换芯片30接收帧/行同步信号,当检测到帧/行同步信号的上升沿时将当前行/帧计数器值加1,在系统上电复位时将当前行/帧计数器值设置为0。
图像对时信息锁存模块55:从行/帧计数模块54接收帧/行同步信号和当前行/帧计数器值,从时间建立与同步模块53接收当前秒计数器值和当前微秒计数器值,从状态控制模块52接收锁存图像对时信息信号;图像对时信息锁存模块55将帧/行同步信号延迟一个时钟周期后,使用延迟后信号的上升沿锁存当前行/帧计数器值、当前秒计数器值和当前微秒计数器值,锁存后的结果存入图像对时信息缓存中;使用从状态控制模块52接收到的锁存图像对时信息信号的上升沿对图像对时信息缓存再次进行锁存,得到锁存后的图像对时信息。
当GPS接收机及其相关接收设备故障而无法提供高精度时标时,航天器平台产生平台时标并通过相机控制器发送给图像对时信息生成FPGA,图像对时信息生成FPGA可以使用平台时标对时,从而保证生成的图像对时信息仍能维持一定的精度。
本实施方式所述的异步串行通信接口芯片10采用MAX491,由于在该航天器中GPS秒脉冲采用RS422电平传输,所以GPS秒脉冲电平转换芯片20采用MAX483。而帧/行同步信号采用低压差分信号(LVDS)电平传输,因此帧/行同步电平转换芯片30采用SN55LVDS32。图像对时信息生成FPGA50采用ACTEL公司生产的FLASH型60万门FPGA,型号为APA600。晶振30采用航天科工203所生产的ZA108,晶振频率10MHz,因此在本实施例中APA600将ZA108输出的时钟信号10分频后得到1MHz的时钟信号,对该时钟信号进行计数得到当前微秒计数器值。
结合图2说明本实施例,图像对时信息生成FPGA50包括串行通信模块51、状态控制模块52、时间建立与同步模块53、行/帧计数模块54和图像对时信息锁存模块55。上述模块用VHDL硬件描述语言编写,使用LiberoIDE集成开发环境,最终在APA600上实现。
本实施方式中所述的状态控制模块52通过主状态机和信息处理状态机两个有限状态机实现。结合图3,所述主状态机包括初始态(Ori_state)521、接收态(Rec_state)522、处理态(Pro_state)523、判断态(Jud_state)524、发送对时信息态(S_T_state)525和发送应答帧态(S_A_state)526六个状态;结合图4,信息处理状态机包括解析态(Ana_state)5231、处理结束态(P_E_state)5232、轮询对时信息态(A_T_state)5233、处理平台时标态(P_P_state)5234和处理高精度时标态(P_H_state)5235五个状态。
主状态机的状态转移过程为:当上电或复位信号为高电平时,进入初始态Ori_state521,当复位信号为低电平,由Ori_state521切换到Rec_state522;当串行通信模块51接收完一帧数据时,由Rec_state522切换到Pro_state523,当信息处理状态机的当前状态为P_E_state5232时主状态机由Pro_state523切换到Jud_state524;在Jud_state524对收到的串行通信数据的类型进行判断,当收到的为轮询对时信息指令时,由Jud_state524切换到S_T_state525,通过串行通讯总线发送锁存后的图像对时信息,发送完毕后由S_T_state525切换到Rec_state522;当收到的为高精度时标或平台时标时,由Jud_state524切换到S_A_state526,通过串行通讯总线发送应答数据帧,发送完毕后由S_A_state526切换到Rec_state522;当收到的数据既不是轮询对时信息指令,也不是高精度时标或平台时标,即收到错误数据时由Jud_state524切换到Rec_state522;在复位信号为高电平时,不论主状态机在那个状态,都切换为Ori_state521。
信息处理状态机的状态转移过程为:上电或系统复位时,信息处理状态机进入Ana_state5231;当主状态机为Pro_state523而信息处理状态机当前状态为Ana_state5231时,对收到的串行通信数据的类型进行判断。当收到的为轮询对时信息指令时,信息处理状态机由Ana_state5231切换为A_T_state5233;当收到的为高精度时标时,由Ana_state5231切换为P_H_state5235,在该状态将时间建立与同步模块53中当前秒计数器值设置为高精度时标数据中对应的秒值;当收到的为平台时标时,由Ana_state5231切换为P_P_state5234,在该状态将时间建立与同步模块53中当前秒计数器值设置为平台时标数据中对应的秒值,将时间建立与同步模块53中当前微秒计数器值设置为平台时标数据中对应的微秒值;当主状态机为Pro_state523,而信息处理状态机当前状态为P_H_state5235、P_P_state5234或者A_T_state5233时,信息处理状态机切换到P_E_state5232;当主状态机为Pro_state523,而信息处理状态机当前状态为P_E_state5232时,信息处理状态机切换到Ana_state5231;当主状态机的当前状态不为Pro_state523时,信息处理状态机切换为Ana_state5231。
锁存图像对时信息信号的产生过程为,当主状态机为Ori_state521时将锁存图像对时信息信号设置为低电平,当信息处理状态机为A_T_state5233且锁存图像对时信息信号为低电平时将锁存图像对时信息信号设置为高电平,当信息处理状态机为P_E_state5232时将锁存图像对时信息信号设置为低电平。
表1为本实施方式中通过总线监视计算机获取的部分图像对时信息生成系统从串行总线返回的应答数据帧和图像对时信息数据。
表1
表1中0712190629代表7月12日19点06分29秒,55 aa 33 00 33为图像对时信息生成FPGA收到高精度时标后返回的应答数据帧。55 aa 30 00 00 00 43 00 06 8a fc 00 36 d9 0e为收到轮询对时指令后返回的图像对时信息,其中55 aa为同步字,30为帧标识,00 00 00 43为秒值,00 06 8a fc为微秒值,00 36 d9为行号,0e为自帧标识开始到图像对时信息的字节累加和,都用16进制表示。从表1可以看出,由于相机控制器每秒向图像对时信息生成系统发送1次高精度时标和1次轮询对时信息指令,图像对时信息生成系统每秒返回1次应答数据帧和图像对时信息,返回的图像对时信息中的秒值每秒累加1,与实际情况吻合。在该实施例的实验中设置成像单元的行周期为3ms,根据相邻两次图像对时信息中的行号差和时间差可以计算得到行周期,计算得到的行周期和设置的行周期基本一致,说明生成的图像对时信息是正确的。
如上所述,对本领域的技术人员来说,在本质上不脱离本发明原理的基础上,可以对该实施例进行形式和细节上的各种改变和修改,这些改变和修改都确定为包含在本发明的范围内,如同权利要求书定义的那样。
一种空间相机图像对时信息生成系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。




动态评分
0.0