








专利摘要
一种欠驱动吊车自适应消摆定位控制方法。该方法包括:构造一种新型的储能函数,在此基础上,充分考虑轨道长度限制、参数未知/不确定等因素,设计一种新型的自适应消摆控制方法,增强台车运动与负载摆动之间的耦合关系,能保证台车准确定位,快速消除负载摆动,并可通过更新律在线补偿参数未知/不确定性因素带来的影响。相比已有方法,该方法能保证台车运动不超出轨道长度限制范围,可取得良好的控制效果,并对参数不确定性与外界扰动具有良好的鲁棒性。
权利要求
1.一种欠驱动吊车自适应消摆定位控制方法,其特征在于该方法包括:
第1、确定控制目标与约束
选择台车的初始位置为 ,目标位置为 ,运送距离为 ,满足
轨道长度约束为 ,即在控制过程中,保证 ,其中, 表示台车位移; 表示时间,变量后面 表示该变量为关于时间 的函数;为简明起见,略去大多数变量后面的 ;
第2、定义误差信号、参数向量与可测向量
定义台车定位误差 与负载摆角误差 分别为
(7)
其中, 表示台车位移, 表示负载摆角, 表示目标位置;定义未知参数向量 和可测向量 ,其中, 的定义分别如下:
其中, 表示正的控制增益, 分别表示台车位移与台车速度, 表示负载摆角与角速度, 表示双曲正切函数, 为摩擦力参数, 为阻力参数, 分别表示负载质量、吊绳长度以及重力加速度;
第3、控制律确定
设计自适应消摆定位控制律 如下:
(11)
其中, 是正的控制增益, 表示 的在线估计,其更新律 为
(12)
其中, 表示正定对角更新增益矩阵,满足 , 表示正定对角更新增益矩阵 中对角线上的第 个元素;
第4、控制方法实现
利用吊车上安装的传感器,实时测量台车位移 ,台车速度 ,负载摆角 ,摆角速度 ,利用式(11)与(12),计算得到控制信号,用来控制电机输出相应的作用力,实现对欠驱动吊车系统的防摆定位控制。
说明书
技术领域
本发明属于欠驱动机械系统自动控制技术领域,特别是涉及一种适用于系统参数未知及轨道长度受限的欠驱动吊车自适应消摆定位控制方法。
背景技术
在过去的几十年间,欠驱动机械系统的自动控制研究得到了研究人员广泛关注[1], [2]。由于欠驱动系统具有能耗小、硬件成本低、机械结构简单等优点,许多机电系统被设计为欠驱动的。还有一些系统,由于受到不可积分的非完整约束影响,也是欠驱动的,如航天飞行器、移动机器人、水下航行器等。此外,当完全驱动系统的部分执行器不能正常工作时,也将退化为欠驱动系统。欠驱动系统的控制问题所面临的主要难点在于其控制量维数少于待控自由度的个数;该类系统的研究具有理论和实际的双重意义。
欠驱动吊车是一种典型的欠驱动系统,在实际中得到了广泛的应用,并在国民经济建设中起到了举足轻重的作用。对吊车而言,制约其工作效率与安全性的最大因素是由于惯性或外界干扰引发的货物空间摆动。就目前而言,研究人员提出了多种控制策略。根据是否需要信号反馈,可将这些方法化为开环控制与闭环控制两类。开环控制方法的核心思想是充分利用台车运动与负载摆动间的非线性动态耦合关系,合理地规划台车运动,实现消摆与定位的双重目标。开环控制的代表性方法包括输入整形(input shaping)[3], [4]、轨迹规划[5]-[8]等。
尽管开环控制策略具有结构简单、易于实现、无需额外传感器等优点,其控制效果易受到参数不确定性及外界干扰的影响。相比之下,由于可以充分利用实时反馈的系统状态,闭环控制方法能够在恶劣的工作环境中取得更为良好的控制效果,并可大幅提升闭环系统的鲁棒性。为此,科研人员提出了多种闭环控制方法[9]-[12],利用信号反馈设计控制律来改善整体的控制效果。
在桥式吊车系统中,支撑台车运行的轨道长度是有限的。因此,台车只能在特定的范围内运行。如果台车的运动超过该范围,则将发生碰撞,导致安全事故的发生。目前,现有欠驱动吊车闭环控制方法最好仅能取得渐近稳定的控制效果,因而无法保证控制系统的暂态性能(如台车运动的超调)。对于这些方法,在台车的目标位置与受限的运动范围边界接近时,一旦参数选取不合理,将导致台车超出该范围。另一方面,由于欠驱动吊车往往运行在复杂的工作环境中,系统极易受到各种不确定性的影响,如货物质量未知、吊绳长度未知、摩擦力未知等。
综上所述,为克服现有开环、闭环控制方法存在的诸多不足之处,提升吊车系统在复杂工作环境中的性能,亟待设计出一种闭环控制策略,能够在存在上述提及的约束与不确定性因素的情况下,实现对欠驱动吊车系统的高性能控制。
发明内容
本发明的目的是解决目前欠驱动吊车系统自动控制方法存在的上述不足之处,提供一种欠驱动吊车自适应消摆定位控制方法。
本发明致力于提出一种新型的自适应消摆控制方法,通过构造新的储能函数提高台车与负载间的耦合关系,以改善暂态控制性能,并充分地考虑轨道的长度限制以及参数未知/不确定等不利因素,通过引入在线更新机制补偿这些限制/因素带来的影响。最后,将所提方法应用于桥式吊车测试平台进行实验,结果表明所提方法能够在台车运动范围受限、参数未知/不确定的情况下取得良好的控制效果,提高系统的工作效率。
本发明提供的欠驱动吊车自适应消摆定位控制方法包括:
第1、确定控制目标与约束
选择台车的初始位置为 ,目标位置为 ,运送距离为 ,满足
轨道长度约束为 ,即在控制过程中,保证 ,其中, 表示台车位移; 表示时间,变量后面 表示该变量为关于时间 的函数;为简明起见,略去大多数变量后面的 。
第2、定义误差信号、参数向量与可测向量
定义台车定位误差 与负载摆角误差 分别为
(7)
其中, 表示台车位移, 表示负载摆角, 表示目标位置;定义未知参数向量 和可测向量 ,其中, 的定义分别如下:
其中, 表示正的控制增益, 分别表示台车位移与台车速度, 表示负载摆角与角速度, 表示双曲正切函数, 为摩擦力参数, 为阻力参数, 分别表示负载质量、吊绳长度以及重力加速度。
第3、控制律确定
设计自适应消摆定位控制律 如下:
(11)
其中, 是正的控制增益, 表示 的在线估计,其更新律 为
(12)
其中, 表示正定对角更新增益矩阵,满足 , 表示正定对角更新增益矩阵 中对角线上的第 个元素。
第4、控制方法实现
利用吊车上安装的传感器,实时测量台车位移 ,台车速度 ,负载摆角 ,摆角速度 ,利用式(11)与(12),计算得到控制信号,用来控制电机输出相应的作用力,实现对欠驱动吊车系统的防摆定位控制。
本发明方法的理论依据及推导过程
第1、系统模型与变换
欠驱动桥式吊车系统的动力学模型表示如下:
(1)
(2)
其中, 、 分别表示台车位移与负载摆角, 为角速度, 为角加速度, 表示台车速度, 表示台车加速度; 表示时间,变量后面 表示该变量为关于时间的函数,为简明起见,在公式中略去大部分变量中的 ; 分别表示台车质量、负载质量与吊绳长度; 为重力加速度; 为电机提供给台车的驱动力, 表示空气阻力, 为阻力参数, 表示轨道与台车间的摩擦力,且 的具体形式如下:
(3)
其中, 代表台车速度, 是摩擦力参数,tanh为双曲正切函数; 的值可通过离线实验辨识获得。
本发明的目标是设计合适的控制方法,实现对吊车系统的消摆定位控制。该目标可描述如下:
(4)
其中,台车的初始位置 表示为 , 代表台车的目标位置, 代表台车的运行距离,即 。
除了式(4)中描述的控制目标之外,为使得随后设计的控制方法具有更强的实用性能,还需要考虑一些实际中的物理约束,具体如下:
1) 整个工作过程中,台车运动须保持在轨道长度约束的范围中,即
(5)
其中, 代表轨道长度约束。
2) 式(1)至(3)中的参数 均为未知的。
考虑到式(5)所述的约束,对于可达的目标位置, 应满足如下条件:
(6)
式(5)描述的约束有着非常重要的实际工程意义。当吊车系统工作时,通过台车在轨道上运动,负载被运送到期望的目标位置。由于轨道长度的限制,台车的运动范围也受到相应的限制。然而,已有吊车控制方法均未对 的运动进行约束。如果控制方法中的参数(增益)选取不合理,台车运动极有可能会超出式(5)中的约束,引发碰撞而导致危险。对于2),在实际生产中,吊车系统会运送不同质量的货物(负载),同时吊绳的准确长度也往往难以测得。除此之外,随着吊车系统的长时间工作,一些机构会发生机械磨损,相应的参数值将发生变化。这些因素为控制方法的设计带来了很大挑战。
第2、控制器设计
为实现式(4)中描述的控制目标,定义如下误差信号:
(7)
式中, 表示台车当前位移 与目标位置 间的误差, 表示摆角误差。
由于吊车系统是无源、耗散的,在此将其控制问题转化为设计合适的控制方法,使得吊车系统的能量函数衰减为零。吊车系统的能量函数 可表示如下:
(8)
可以看出,式(8)关于 及 是正定的(与文献[1], [3]-[12], [14]中一样,在此假设 )。在 中加入台车速度相关项,可对原系统进行动能整形(kinetic energy shaping,KES),能取得更好的控制效果[13]。类似地,利用势能整形(potential energy shaping,PES),通过引入位置误差相关的项,可使整形后的能量函数在目标平衡点处取得最小值。基于此,对能量函数(8)进行整形,如下:
(9)
其中, 为整形后的能量函数, 表示控制增益, 分别代表动能整形与势能整形。易知, 关于 是正定的。对式(9)关于时间求导,并利用式(1)、(2)进行化简,可求得如下结果:
(10)
其中, 是 关于时间的导数, 表示可测向量, 为未知参数向量,上标T代表向量转置, 的定义如下:
根据式(10)的形式,设计如下控制器:
(11)
其中, 是正的控制增益,第二项用以保证式(5)成立, 表示对 的在线估计,其更新律 的表达式如下:
(12)
其中, 为正定对角更新增益矩阵,满足 , 表示正定对角更新增益矩阵 中对角线上的第 个元素。定义估计误差向量 如下:
(13)
对于式(13)关于时间求导,可得
(14)
第3、稳定性分析
这部分将通过分析说明,本发明提出的控制器(11)以及参数更新律(12),可以使台车从其初始位置 运动到目标位置 ,同时充分抑制并消除负载的往复摆动,即
(15)
同时,台车位移 将一直保持在 的范围内。
为证明该结论,首先考虑如下标量函数 :
(16)
对式(16)关于时间求导,代入式(10)至(14)进行化简,可得如下结果:
(17)
由式(17)可知, 非增,即
(18)
注意到 ,因此,如果 要超出 范围,它必须首先通过 ,其中, , 代表无穷小量。那么不妨假设存在某一时刻, ,则此时 。这与式(18)所得结论矛盾。因此,由反证法可得结论
(19)
即 会始终在 范围内。则对 ,均有 成立。由式(16),可知 。同时,考虑到式(18)以及 有界,可得如下结论:
(20)
除此之外,根据式(16)和(20)可知,下列信号均有界,即
(21)
由于 中各元素均有界,根据式(13)与(21),可知 有界,即
(22)
为分析 的有界性,考虑如下两种情况:
情形1: 。由式(21)知 。因 ,则根据 以及 ,可得 。
情形2: 。由 的定义知 ,即 ,所以, 有界。
由上述分析可知, 有界,即
(23)
综合式(21)至(23)的结论,可知
(24)
由式(17)知 负半定。因此,为分析闭环信号的收敛性,定义如下集合 :
(25)
在此基础上,再定义集合 为 上的最大不变集,于是可知在集合 中,
(26)
将式(26)代入式(2),可得(与文献[1], [3]-[12], [14]中一样,在此假设 )
(27)
式(26)、(27)代入式(1)、(3)及(11),同时利用定义 ,可得如下关系:
(28)
由式(6)、(19),可知 恒为正。因此,可得:
(29)
综合式(26)、(27)和(29),可知最大不变集 中只包含闭环系统的平衡点。利用拉塞尔不变性原理(LaSalle’s invariance principle)[15],可知式(15)中所述的结论成立。结合式(19),可知控制器(11)能够实现期望的控制目标。
本发明的优点和有益效果
针对欠驱动吊车,本发明提出了一种自适应消摆定位控制方法。相比现有闭环控制方法,本方法能保证台车运动始终不会超出轨道长度限制的范围,可以通过在线更新律环节对系统参数未知、不确定性等不利因素加以补偿,实现良好的台车定位与负载消摆性能,并对外界干扰表现出很好的鲁棒性,具有良好的实际应用前景。
附图说明:
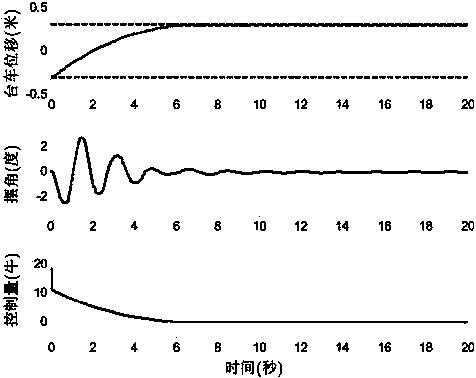
图1为实验1中本发明所提方法的实验结果,箭头指出的小图为局部放大图;
图2为实验1中文献[14]中滑模控制方法的实验结果,箭头指出的小图为局部放大图;
图3为实验1中线性二次型调节器方法的实验结果,箭头指出的小图为局部放大图;
图4为实验2中情形1的实验结果;
图5为实验2中情形2的实验结果;
图6为实验2中情形3的实验结果。
具体实施方式:
实施例1:
第1、实验步骤描述
第1.1、确定控制目标与约束
选择台车的初始位置为 ,目标位置为 ,运送距离为 ,满足
轨道长度约束为 ,即在控制过程中,保证 ,其中, 表示台车位移。
第1.2、定义误差信号、参数向量与可测向量
定义台车定位误差 与负载摆角误差 分别为
(7)
其中, 表示台车位移, 表示负载摆角, 表示目标位置;定义未知参数向量 和可测向量 , 定义分别为
其中, 表示正的控制增益, 分别表示台车位移与台车速度, 表示负载摆角与角速度, 表示双曲正切函数, 为摩擦力参数, 为阻力参数, 分别表示负载质量、吊绳长度以及重力加速度。
第1.3、控制律确定
设计自适应消摆定位控制律 如下:
(11)
其中, 为正控制增益, 表示 的在线估计,其更新律 为
(12)
其中, 表示正定对角更新增益矩阵,满足 , 表示正定对角更新增益矩阵 中对角线上的第 个元素。
第1.4、控制方法实现
利用吊车上安装的传感器,实时测量台车位移 ,台车速度 ,负载摆角 ,摆角速度 ,利用式(11)与(12),计算得到控制信号,控制电机输出相应的作用力,实现对欠驱动吊车系统的防摆定位控制。
第2、实验结果描述
为了验证本发明所提出方法的有效性,按照上述步骤,在桥式吊车实验平台[16]上进行实验。实验中,台车质量、负载质量、吊绳长度以及重力加速度具体选取如下:
通过辨识得到 ;台车运动距离、初始位置、目标位置和轨道长度约束具体如下:
即,台车需要在 的范围内运动。
实验分为两部分进行。第一部分(实验1)将本发明提出的方法和一些现有方法进行对比;第二部分(实验2)通过增加不确定性与外界干扰,验证本发明方法的鲁棒性。
第2.1、实验1:与已有方法对比。该实验将验证本发明提出的方法在台车定位与负载消摆方面的效果,并与线性二次型调节器(linear quadratic regulator,LQR)方法、文献[14]中的滑模控制(sliding mode control,SMC)方法进行比较。对于LQR方法,其对应的代价函数J的形式如下:
其中 , 为台车定位误差, 为台车速度, 为负载摆角, 为角速度, 为权值(矩阵),经调节, 。LQR方法的具体表达式如下:
文献[14]中SMC方法的具体表达式如下:
其中, 为符号函数, 为控制增益, 为滑模面,控制增益选取为 。为避免出现抖振,实验过程中用函数 代替 。
对于本发明所提出的方法,其增益取为 。同时选取 。
附图1至3中给出了实验结果。其中,图1中实线从上到下依次刻画了台车位移、负载摆角、控制量及 的在线估计 随时间变化的曲线,虚线表示 ,箭头指出的小图为局部放大图;图2与图3中实线从上到下依次刻画了台车位移、负载摆角与控制量,虚线代表 ,箭头指出的小图为局部放大图。分析可知,三种方法均能在6s的时间内将台车运送到目标位置,最终的定位误差均保持在3 mm之内。同时,本发明提出的方法在摆角抑制与消除方面的性能要优于两种对比方法。另一方面,观察图1至3中放大的部分并进行对比知,本发明的方法可保证x(t)始终在约束范围 内;相比之下,SMC方法和LQR方法则均导致x(t)超出约束范围。除此之外,与对比方法相比较,本发明提出的方法无需吊车系统参数的精确值,更具实用性。
第2.2、实验2:鲁棒性测试实验(仅测试本发明所提出方法的性能)。考虑如下的三种情形:
情形1、参数变化/不确定:将负载质量与吊绳长度分别变为 ,但其名义值仍为 ;
情形2、非零初始摆角干扰:初始摆角为3.4°左右;
情形3、外界干扰:在第5s与第8.5s左右分别加入幅值约2.5°的摆动干扰。
在实验2中,本发明提出方法的增益与第一组实验中相同。图4至6给出了相应的实验结果,图中,实线从上到下依次刻画了台车位移、负载摆角与控制量,虚线表示 。在图4至6中,为简洁起见,并未再次给出在线估计 随时间变化的曲线。通过比较图4与图1可知,本发明所提出方法的控制效果在这两种情况下保持基本一致,证明了其良好的适应能力。从图5与图6中可看出,所提方法能快速消除非零初始摆角干扰与外界干扰对吊车系统造成的不利影响,保持良好的消摆定位性能。此外,三种情形下的台车运动均保持在约束范围 内,与理论分析吻合。
这一系列实验结果均证明了本发明所提方法的有效性与可行性。
参考文献
[1] E. M. Abdel-Rahman, A. H. Nayfeh, Z. N. Masoud, Dynamics and control of cranes: A review. Journal of Vibration and Control, 9(7): 863-908, 2003.
[2] J.-X. Xu, Z.-Q. Guo, T. H. Lee, Design and implementation of integral sliding mode control on an underactuated two-wheeled mobile robot. IEEE Transactions on Industrial Electronics, 61(7): 3671-3681, 2014.
[3] K. Sorensen, W. Singhose, Command-induced vibration analysis using input shaping principles. Automatica, 44(9): 2392-2397, 2008.
[4] K. Sorensen, W. Singhose, S. Dickerson, A controller enabling precise positioning and sway reduction in bridge and gantry cranes. Control Engineering Practice, 15(7): 825-837, 2007.
[5] N. Uchiyama, H. Ouyang, S. Sano, Simple rotary crane dynamics modeling and open-loop control for residual load sway suppression by only horizontal boom motion. Mechatronics,
23(8): 1223-1236, 2013.
[6] N. Sun, Y. Fang, Y. Zhang, B. Ma, A novel kinematic coupling-based trajectory planning method for overhead cranes. IEEE/ASME Transactions on Mechatronics, 17(1): 166-173, 2012.
[7] N. Sun, Y. Fang, An efficient online trajectory generating method for underactuated crane systems. International Journal of Robust and Nonlinear Control, 24(11): 1653-1663, 2014.
[8] N. Sun, Y. Fang, X. Zhang, Y. Yuan, Transportation task-oriented trajectory planning for underactuated overhead cranes using geometric analysis. IET Control Theory and Applications, 6(10): 1410-1423, 2012.
[9] C.-Y. Chang, H. W. Lie, Real-time visual tracking and measurement to control fast dynamics of overhead cranes. IEEE Transactions on Industrial Electronics, 59(3): 1640-1649, 2012.
[10] N. Uchiyama, Robust control of rotary crane by partial state feedback with integrator. Mechatronics, 19(8): 1294-1302, 2009.
[11] Y. Zhao, H. Gao, Fuzzy-model-based control of an overhead crane with input delay and actuator saturation. IEEE Transactions on Fuzzy Systems, 20(1): 181-186, 2012.
[12] Z.N. Masoud, A.H. Nayfeh, Sway reduction on container cranes using delayed feedback controller. Nonlinear Dynamics, 34(3-4): 347-358, 2003.
[13] R. Ortega, A. J.van der Schaft, I. Mareels, B. Maschke, Putting energy back in control. IEEE Control Systems Magazine, 21(2): 18-33, 2001.
[14] N. B. Almutairi, M. Zribi, Sliding mode control of a three-dimensional overhead crane. Journal of Vibration and Control, 15(11): 1679-1730, 2009.
[15] 方勇纯, 卢桂章. 非线性系统理论. 北京: 清华大学出版社, 2009.
[16] 马博军, 方勇纯, 王鹏程, 苑英海. 三维桥式吊车自动控制实验系统. 控制工程, 18(2): 239-243, 2011。
欠驱动吊车自适应消摆定位控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0