











专利摘要
本发明公开了一种基于等比例坐标变换的应力控制器件与方法,应力控制器件包括基体,基体具有多个阵列分布且彼此连接形成为二维网格结构的结构单元,结构单元形成为具有多个连接体的正多边形,相邻两个连接体相连形成有连接节点且相邻两个结构单元的相邻两个连接体共用一个,位于基体的中部的结构单元发生变形以使基体分为:基础结构区域、中心孔洞区域和坐标变换区域。根据本发明实施例的应力控制器件,通过坐标变换改变连接节点位置、然后将连接体的长度和连接体的其他参数等比例地改变的方式,可以实现控制整体结构中的应力分布,从而减小中心孔洞区域存在而引起的应力集中问题,且结构简单,参数容易计算,便于进行结构设计。
权利要求
1.一种基于等比例坐标变换的应力控制器件,其特征在于,包括基体,所述基体具有多个阵列分布且彼此连接形成为二维网格结构的结构单元,所述结构单元形成为具有多个连接体的正多边形,相邻两个所述连接体相连形成有连接节点且相邻两个所述结构单元的相邻两个连接体共用一个,位于所述基体的中部的结构单元发生变形以使所述基体变化为:
位于外侧的基础结构区域,所述基础结构区域的所述结构单元未变形;
位于内侧的中心孔洞区域,所述中心孔洞区域由处于所述基体的中部的所述结构单元各边等比例向外扩展后限定出;
坐标变换区域,所述坐标变换区域位于所述基础结构区域和所述中心孔洞区域之间,所述坐标变换区域具有沿所述中心孔洞区域的径向分布的多个,所述坐标变换单元的每个所述结构单元沿所述中心孔洞区域的径向向外平移并压缩,且使沿所述中心孔洞区域的周向延伸的连接体拉伸,
其中,拉伸前后的每个所述连接节点与距离所述中心孔洞区域的中心的距离分别为r和r′,拉伸前后的每个所述连接体相对于所述中心孔洞区域的中心的圆心角分别为θ和θ′,拉伸前后的每个所述连接体的长度分别为L和L′,拉伸前后的每个所述连接体的最大宽度分别为W和W′,所述中心孔洞区域的半径为R1,所述坐标变换区域的半径为R2,
2.根据权利要求1所述的基于等比例坐标变换的应力控制器件,其特征在于,拉伸前后的所述连接节点的宽度不变。
3.根据权利要求1所述的基于等比例坐标变换的应力控制器件,其特征在于,所述正多边形为正六边形。
4.根据权利要求1所述的基于等比例坐标变换的应力控制器件,其特征在于,所述连接体的截面宽度从中部向两端逐渐递减。
5.根据权利要求4所述的基于等比例坐标变换的应力控制器件,其特征在于,所述连接体的截面形成为下底边对接相连的双梯形。
6.根据权利要求4所述的基于等比例坐标变换的应力控制器件,其特征在于,所述连接体形成为板状或柱状。
7.根据权利要求1所述的基于等比例坐标变换的应力控制器件,其特征在于,所述基体的由任意线弹性各向同性材料或处于线弹性各向同性阶段的材料制成。
8.根据权利要求7所述的基于等比例坐标变换的应力控制器件,其特征在于,所述基体为金属基体或聚合物基体。
9.根据权利要求1所述的基于等比例坐标变换的应力控制器件,其特征在于,所述基体为一体形成件。
10.一种制造根据权利要求1-9中任一项所述的基于等比例坐标变换的应力控制器件的应力控制方法,其特征在于,包括以下步骤:
获取所述基体;
在所述基体的中部选取一个所述结构单元进行各边等比例向外扩展,并使与其邻近的所述结构单元沿其径向向外平移并压缩,以形成所述中心孔洞区域和所述坐标变换区域。
11.根据权利要求10所述的应力控制方法,其特征在于,所述基体切割、铸造或增材制造形成。
说明书
技术领域
本发明涉及力学技术领域,更具体地,涉及一种基于等比例坐标变换的应力控制器件与方法。
背景技术
人工结构目前已经能够实现在力学、电磁学、热学、声学等领域的特殊性能材料,达到前所未有的奇特性质。其中,在力学方面,通过人工结构设计,可以制造特异泊松比结构、超轻结构、冲击吸收结构等具有传统材料所不能实现的性能的结构。然而,要控制结构的应力分布以方便工程设计,则必须面对复杂且难以设计的四阶弹性张量C,只能以各向各向同性或简单的各向异性材料为基础进行结构设计。近年来,一种包含双梯形或双圆台的二维或三维结构被提出,其具有极高的体积弹性模量与剪切模量的比,这一类似液体的结构参数具有较为重要的设计意义。
对于一种网格结构,当其包含远大于网格晶格常数的中心孔洞区域时,在受力情形下将产生较为严重的应力集中,将容易产生拉断或压溃,这对于结构承载非常不利。如能在一定程度削弱中心孔洞区域对结构整体受力的影响,则能够拓展此类网格结构的应用范围。
发明内容
本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种基于等比例坐标变换的应力控制器件,所述应力控制器件通过连接体结构参数的变换可以削减中心孔洞区域对于网格结构应力集中的影响。
本发明还提出了一种基于等比例坐标变换的应力控制方法。
根据本发明实施例的基于等比例坐标变换的应力控制器件,所述应力控制器件包括基体,所述基体具有多个阵列分布且彼此连接形成为二维网格结构的结构单元,所述结构单元形成为具有多个连接体的正多边形,相邻两个所述连接体相连形成有连接节点且相邻两个所述结构单元的相邻两个连接体共用一个,位于所述基体的中部的结构单元发生变形以使所述基体变化为:位于外侧的基础结构区域,所述基础结构区域的所述结构单元未变形;位于内侧的中心孔洞区域,所述中心孔洞区域由处于所述基体的中部的所述结构单元各边等比例向外扩展后限定出;坐标变换区域,所述坐标变换区域位于所述基础结构区域和所述中心孔洞区域之间,所述坐标变换区域具有沿所述中心孔洞区域的径向分布的多个,所述坐标变换单元的每个所述结构单元沿所述中心孔洞区域的径向向外平移并压缩,且使沿所述中心孔洞区域的周向延伸的连接体拉伸,其中,拉伸前后的每个所述连接节点与距离所述中心孔洞区域的中心的距离分别为r和r′,拉伸前后的每个所述连接体相对于所述中心孔洞区域的中心的圆心角分别为θ和θ′,拉伸前后的每个所述连接体的长度分别为L和L′,拉伸前后的每个所述连接体的最大宽度分别为W和W′,所述中心孔洞区域的半径为R1,所述坐标变换区域的半径为R2,各参数拉伸前后的关系如公式所示,
根据本发明实施例的基于等比例坐标变换的应力控制器件,通过坐标变换改变连接节点位置、然后将连接体的长度和连接体的其他参数等比例地改变的方式,可以实现控制整体结构中的应力分布,从而减小中心孔洞区域存在而引起的应力集中问题。
另外,根据本发明上述实施例的基于等比例坐标变换的应力控制器件,还可以具有如下附加的技术特征:
根据本发明实施例的基于等比例坐标变换的应力控制器件,拉伸前后的所述连接节点的宽度不变。由此,通过控制一部分变量,可以简化参数的计算,利于进行结构设计。
可选地,所述正多边形为正六边形。相比于其他正多边形构成的网格结构,所述正六边形的网格结构可以在相同的网格结构面积下,具有较少的节点,方便计算。
根据本发明实施例的基于等比例坐标变换的应力控制器件,所述连接体的截面宽度从中部向两端逐渐递减。由此可以使经过拉伸后的连接件性能相对稳定。
可选地,所述连接体的截面形成为下底边对接相连的双梯形。由此,通过截面形状为双梯形的连接体,可以使连接体发生变化的参数更加直观。
进一步地,所述连接体形成为板状或柱状。由此可以使所述网格结构更加稳定。
根据本发明进一步的实施例,所述基体由任意线弹性各向同性材料或处于线弹性各向同性阶段的材料制成。由此,材料的弹性模量、密度对本发明的应力控制效果没有影响;材料的泊松比对本发明的应力控制效果影响非常微小,在实际应用中可以忽略。
进一步地,所述基体为金属基体或聚合物基体。由此,制造本发明实施例的应力控制器件的材料易于获得。
可选地,所述基体为一体形成件。由此,可以提高器件的整体结构稳定性和强度,并且变形时不易发生损坏,应力集中问题少。
根据本发明实施例的基于等比例坐标变换的应力控制器件,包括以下步骤:获取所述基体;在所述基体的中部选取一个所述结构单元进行各边等比例向外扩展,并使与其邻近的所述结构单元沿其径向向外平移并压缩,以形成所述中心孔洞区域和所述坐标变换区域。
进一步地,所述基体切割、铸造或增材制造形成。由此,可通过多种方式获取所述基体。
本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
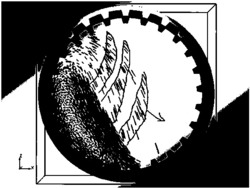
图1是相关技术中具有中心孔洞区域的基体的结构示意图;
图2是根据本发明实施例的应力控制器件的结构示意图;
图3是根据本发明实施例的应力控制器件的基体的结构示意图;
图4是根据本发明实施例的应力控制器件的结构单元的结构示意图;
图5是根据本发明实施例的应力控制器件的变化前后的连接体截面的结构示意图;
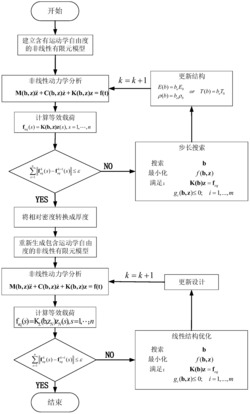
图6是根据本发明实施例的应力控制器件的制造方法流程图;
图7是基体、现有技术中具有中心孔洞区域的基体、应力控制器件在承受载荷时产生的应力和位移分布图。
附图标记:
应力控制器件100;基体101;
现有技术中具有中心孔洞区域的基体102’;
基础结构区域10;
中心孔洞区域20;
坐标变换区域30;
结构单元40;
连接节点50;连接体60。
具体实施方式
下面详细描述本发明的实施例,所述实施例的示例在附图中示出。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
在本发明的描述中,需要理解的是,术语“中心”、“长度”、“宽度”、“厚度”、“上”、“下”、“径向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
下面参考附图描述根据本发明实施例的基于等比例坐标变换的应力控制器件100。
如图1-图7所示,根据本发明实施例的应力控制器件100包括基体101,基体101具有多个阵列分布且彼此连接形成为二维网格结构的结构单元40。换言之,基体101包含多个结构单元40,多个结构单元40阵列分布,彼此连接形成二维网格结构。结构单元40形成为具有多个连接体60的正多边形,相邻两个连接体60相连形成有连接节点50且相邻两个结构单元40的相邻两个连接体60共用一个。换言之,相邻的两个连接体60之间由连接节点50连接,多个连接体60相连构成正多边形的结构单元40,相邻两个结构单元40通过共边的连接体60互相连接。位于基体101的中部的结构单元40发生变形以使基体101变化为:位于外侧的基础结构区域10、位于内侧的中心孔洞区域20和坐标变换区域30。
位于外侧的基础结构区域10的结构单元40未变形。位于内侧的中心孔洞区域20由处于基体101的中部的结构单元40各边等比例向外扩展后限定出。坐标变换区域30位于基础结构区域10和中心孔洞区域20之间,坐标变换区域具有沿中心孔洞区域20的径向分布的多个,坐标变换单元的每个结构单元40沿中心孔洞区域20的径向向外平移并压缩,且使沿中心孔洞区域20的周向延伸的连接体60拉伸。其中,拉伸前后的每个连接节点50与距离中心孔洞区域20的中心的距离分别为r和r′,拉伸前后的每个连接体60相对于中心孔洞区域20的中心的圆心角分别为θ和θ′,拉伸前后的每个连接体60的长度分别为L和L′,拉伸前后的每个连接体60的最大宽度分别为W和W′,中心孔洞区域20的半径为R1,坐标变换区域30的半径为R2,各参数拉伸前后的关系如公式所示,
对于一种包含远大于网格结构单元40常数的中心孔洞区域20的网格结构,现有技术中,通过在基体101上去除部分结构获得具有中心孔洞区域20的网格结构的方式,使得此种网格结构在受力情形下将产生较为严重的应力集中,将容易产生拉断或压溃,这对于结构承载非常不利。
根据本发明实施例的应力控制器件100,获得中心孔洞区域20的方式为,在基体101的中部的结构单元40,各边等比例向外扩展后限定出,从而得到具有基础结构区域10、中心孔洞区域20和坐标变换区域30的网格结构,通过改变网格格点位置,在基体101的中部留出中心孔洞区域20,相比于在基体101上直接制造中心孔洞区域20的方式,本发明实施例可以有效地减少应力集中效应。进一步地,通过合理地设计坐标变换区域30内的结构参数,则能够使基础结构区域10在承受载荷时,产生的应力和应变更加接近没有中心孔洞区域20的基体101在承受载荷时的情形。
根据本发明实施例的基于等比例坐标变换的应力控制器件100,通过坐标变换改变连接节点50的位置、然后将连接体60的长度和连接体60的其他参数等比例地改变的方式,可以实现控制整体结构中的应力分布,从而减小中心孔洞区域20存在而引起的应力集中问题。
根据本发明实施例的应力控制器件100,拉伸前后的连接节点50的宽度不变。也就是说,连接体60上与连接节点50相对应的部分的的宽度不随拉伸后连接体60长度的变化而变化。由此,通过控制一部分变量,可以简化参数的计算,利于进行结构设计。
根据本发明的一个实施例,拉伸前后的连接节点50的宽度可设为w=0.4mm。值得注意的是,本发明实施例给出的连接节点50的宽度仅为更好的理解本发明,不能理解为对本发明的限制。
如图4所示,结构单元40可形成为具有多个连接体60的正多边形,该正多边形可为正六边形。相比于其他正多边形构成的网格,正六边形的网格结构可以在相同的网格结构面积下,具有较少的连接节点50,方便计算并且变形性好。
如图5所示的连接体60的截面图,即连接体60沿基体101的平面方向在连接体60中心的剖视图,连接体60的截面宽度从中部向两端逐渐递减。连接体60的截面为的大致形状为,中间的部分较宽,上下两端的部分窄的形状。由此可以使经过拉伸后的连接体60的性能相对稳定。
可选地,连接体60的截面形成为下底边对接相连的双梯形,连接体60的最大宽度即为连接体60的截面中单个梯形的下底,连接节点50的宽度即为连接体60的截面中单个梯形的上底,可选地,上底w=0.4mm,下底W=1mm。由此,通过截面形状为双梯形的连接体60,可以使连接体60发生变化的参数更加直观,并且连接体60在变形时不易发生损坏。
进一步地,在坐标变换区域30中,双梯形中单个梯形的下底宽度W随连接节点50间的距离变化而等比例变化,而双梯形中单个梯形的上底宽度w不随连接节点50间距离的变化发生变化。
可选地,连接体60形成为板状或柱状。换言之,连接体60可为双梯形体对接的连接体或者双圆台组成的连接体。由此,可以使网格结构更加稳定。
根据本发明的一个实施例,基体101由任意线弹性各向同性材料或处于线弹性各向同性阶段的材料制成。可选地,基体101可以为金属基体或聚合物基体。由此,材料的弹性模量、密度对本发明实施例的应力控制器件100的应力控制效果没有影响;材料的泊松比对本发明实施例的应力控制器件100的应力控制效果影响非常微小,在实际应用中可以忽略。
在如图3所示的具体示例中示出了一种基础网格模型,水平方向结构单元40数可为22个,竖直方向结构单元40数可为23个,相邻连接节点50间的距离为L=4mm,连接节点50间的连接体60厚度为z=4mm。上下边界上的格点采用固定约束,左右边界上受均匀拉应力,大小为p=40Pa。需要指出的是,对于各向同性线弹性材料,应变随应力的变化是线性的,故此处的厚度、力的大小在不产生材料失效且不改变材料宏观性质的范围内是任意的。
进一步地,本发明实施例的应力控制器件100的结构单元40的形状、数量或格点数量不能理解为对本发明的限制。不同的结构单元40数量或格点数量不会在趋势上改变本发明的应力控制结果。
本发明实施例的应力控制器件100上承受的载荷方向可以为任意平面方向,本发明实施例的应力控制器件100不但适用于载荷沿着或垂直某些特定的晶向,还适用于施加任意角度的载荷情形。
边缘约束条件可以在边界上是自由、固定、单方向滑动或上述的组合。本发明实施例的应力控制器件100的材料参数,包括基础连接节点50间距L,基础梯形上底和下底宽度w和W,中心孔洞区域20的半径R1,坐标变换区域30的半径R2,平面结构厚度z可以在不影响结构基本的网格结构下进行调整,且不会在趋势上改变本发明器件的应力控制结果。结构参数基础L,W,w,R1,R2和z的数值及结构的连接节点50的数量可以随需求改变。
图1为现有技术中具有中心孔洞区域的基体102’的结构,该结构是由基体101在中心部位直接去掉与中心孔洞区域20相对应的圆形网格结构得到的,可选地,中心孔洞区域20半径可以为R1=30mm。
如图2所示,根据本发明实施例的应力控制器件100,为了削减中心孔洞区域20对外围结构在整体承受载荷时的影响,可选取R2=60mm的范围作为坐标变换区域30,在此区域内改变基体101的参数来生成中心孔洞区域20而非直接去除结构。将基体101中处于此坐标变换区域30内的连接节点50做如下变换:
其中,r,r′分别为变换前和变换后连接节点50与中心孔洞区域20的中心的距离,θ,θ′分别为变换前后的连接节点50相对中心孔洞区域20的中心的角度。然后,对于原本相邻的连接节点50,其距离随此坐标变换发生了改变,需要等比例地调整连接体60的截面的双梯形的参数:
其中,L′,W′分别为变换后的连接节点50间的距离和连接体60的截面的双梯形下底宽度。作为示例,对于在基础模型中位于极坐标 及 的两点,距离为L=4mm,在变换后,其坐标变为 及 距离变为L′=34mm,下底宽度W变为W′=8.5mm。
进一步地,变换后的连接节点50间连接体60的下底宽度W′可以在保证网格结构基准不变的情形下适当按比例增减以调整本方法的应力控制效果,坐标变换区域30的内侧可以适当去除以留出更多空间。
可选地,基体101为一体形成件。由此,可以提高器件的整体结构稳定性和强度,并且变形时不易发生损坏,应力集中问题少。
如图6所示,根据本发明实施例的基于等比例坐标变换的应力控制方法,应力控制方法包括:
S1:获取基体101;
S2:在基体101的中部选取一个结构单元40进行各边等比例向外扩展,并使与其邻近的结构单元40沿其径向向外平移并压缩,以形成基础结构区域10、中心孔洞区域20和坐标变换区域30。
在本发明中,对于基体101的获取方式不做特殊要求,可选地,基体101切割、铸造或增材制造形成。具体地,基体101可由切割机或机床等工具切割获得;金属基体101可以铸造成型;增材制造是采用材料逐渐累加的方法进行制造,从而得到基体101。由此,可通过多种方法获取基体101。
如图7所示,由基体101、现有技术中具有中心孔洞区域20的基体102’以及本发明实施例的应力控制器件100在承受载荷时的各点的应力、位移分布的对比,对于变换后的模型,在坐标变换区域30外的基础结构区域10内,其应力、位移更加接近基础模型,可以证明本发明实施例的应力控制器件100在减少应力集中方面具有明显的效果。
对于不同的实际需求,可以采用不同的参数,如不同的网格形状、连接节点50的数量、晶格常数、基础连接体60的形状参数、载荷形式、约束形式等,在趋势上不影响本器件的实际应用效果。
根据本发明实施例的基于等比例坐标变换的应力控制器件100的其他构成以及操作对于本领域的普通技术人员来说是可知的,在此不再详细描述。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
基于等比例坐标变换的应力控制器件与方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。








动态评分
0.0