








专利摘要
本发明公开了一种实现显微镜系统超分辨成像的方法。该方法基于一包括光源、聚焦镜、物镜和图像探测器的显微镜系统,包括:搭建显微镜系统;改变显微镜系统中聚焦镜的数值孔径,采集样品的分别对应不同聚焦镜数值孔径的至少两张暗场像;在至少两张暗场像中分别提取对应像素的散射强度值,构造以聚焦镜数值孔径为自变量,以所提取的散射强度值为因变量的实验散射强度曲线;由实验散射强度曲线获得样品上瑞利分辨单元内部亚分辨尺度的微观结构信息,实现显微镜的超分辨成像。本发明具有突破显微镜系统的固有分辨率极限、并提升成像衬度的优点。
权利要求
1.一种实现显微镜系统超分辨成像的方法,该方法基于一包括光源、聚焦镜、物镜和图像探测器的显微镜系统,包括:
搭建所述显微镜系统;
改变所述显微镜系统中聚焦镜的数值孔径,采集样品的分别对应不同聚焦镜数值孔径的至少两张暗场像;
在所述至少两张暗场像中分别提取对应像素的散射强度值,构造以聚焦镜数值孔径为自变量,以所提取的散射强度值为因变量的实验散射强度曲线;
由所述实验散射强度曲线获得样品上瑞利分辨单元内部亚分辨尺度的微观结构信息,实现显微镜的超分辨成像。
2.根据权利要求1所述的实现显微镜系统超分辨成像的方法,其中,
所述搭建显微镜系统的步骤包括:使聚焦镜的数值孔径等于物镜的数值孔径,样品在图像探测器的探测平面成明场像;
所述改变显微镜系统中聚焦镜的数值孔径,采集样品的分别对应不同聚焦镜数值孔径的至少两张暗场像的步骤包括:保持所述显微镜系统中光源、物镜和图像探测器的位置和光学参数不变,样品和聚焦镜的位置不变,分次逐步增加聚焦镜的数值孔径;采集每次聚焦镜数值孔径增加后,样品在图像探测器的探测平面所成的暗场像。
3.根据权利要求2所述的实现显微镜系统超分辨成像的方法,其中,所述分次逐步增加聚焦镜的数值孔径的步骤中,通过以下方式来增加聚焦镜的数值孔径:
将第一聚焦镜更换为第二聚焦镜,第二聚焦镜的数值孔径大于第一聚焦镜的数值孔径。
4.根据权利要求3所述的实现显微镜系统超分辨成像的方法,其中,所述搭建显微镜系统的步骤还包括:在聚焦镜和样品之间设置光束遮挡器;
所述将第一聚焦镜更换为第二聚焦镜之后,该方法还包括:增大光束遮挡器的直径以保持聚焦镜的出射光瞳环宽度不变。
5.根据权利要求2所述的实现显微镜系统超分辨成像的方法,其中,所述搭建显微镜系统的步骤中,采用数值孔径大于3倍物镜数值孔径的聚焦镜,并在聚焦镜和样品之间设置环形光阑;
所述分次逐步增加聚焦镜的数值孔径的步骤中,通过以下方式来增加聚焦镜的数值孔径:增加所述环形光阑的半径。
6.根据权利要求2所述的实现显微镜系统超分辨成像的方法,其中,所述分次逐步增加聚焦镜的数值孔径的步骤包括:以等间距分次逐步增大聚焦镜的数值孔径。
7.根据权利要求1所述的实现显微镜系统超分辨成像的方法,
所述采集样品的分别对应不同聚焦镜数值孔径的至少两张暗场像的步骤中:采集样品的分别对应3-5个聚焦镜数值孔径的暗场像;
所述构造实验散射强度曲线的步骤中,所述实验散射强度曲线上的取样点数为所述的3-5个。
8.根据权利要求1所述的实现显微镜系统超分辨成像的方法,其中,所述由实验散射强度曲线获得样品上瑞利分辨单元内部亚分辨尺度的微观结构信息的步骤包括:
获取不同粒径的微观孔洞/微粒各自对应的参照散射强度曲线;
采用所述多条参照散射强度曲线分别对所述实验散射强度曲线进行拟合;
确定与所述实验散射强度曲线拟合最优的参照散射强度曲线,该参照散射强度曲线对应的粒径即为样品上微观孔洞/微粒的粒径。
9.根据权利要求8所述的实现显微镜系统超分辨成像的方法,其中,所述获取不同粒径的微观孔洞/微粒各自对应的参照散射强度曲线的步骤中,通过以下公式来理论模拟特定粒径的微观孔洞/微粒对应的参照散射强度值:
其中, 为以图像探测器中心为原点的二维坐标向量,θc为聚焦镜的数值孔径,Rc代表聚焦镜的出瞳函数,d0代表样品至波带片物镜的距离,Azp表示物镜的振幅传递函数,ts表示样品的透射率函数,M表示显微镜放大率,FT表示二维傅立叶变换操作。
10.根据权利要求8所述的实现显微镜系统超分辨成像的方法,其中,
所述在至少两张暗场像中分别提取对应像素的散射强度值,构造实验散射强度曲线的步骤包括:在至少两张暗场像中分别提取感兴趣区域内全部像素的散射强度值,对每一像素构造一条实验散射强度曲线;
所述采用多条参照散射强度曲线分别对所述实验散射强度曲线进行拟合的步骤包括:采用多条参照散射强度曲线分别对所述多条实验散射强度曲线进行拟合;
所述确定与该实验散射强度曲线拟合最优的参照散射强度曲线,该参照散射强度曲线对应的粒径即为样品上微观孔洞/微粒的粒径的步骤包括:分别确定与该多条实验散射强度曲线拟合最优的参照散射强度曲线;获得对应该多条实验散射强度曲线的多个微观孔洞/微粒粒径;通过对该多个微观孔洞/微粒粒径进行平均或采用最大概率法确定样品上微观孔洞/微粒的最终粒径。
11.根据权利要求1所述的实现显微镜系统超分辨成像的方法,其中,所述由所述散射强度曲线获得样品上瑞利分辨单元内部亚分辨尺度的微观结构信息的步骤包括:
步骤D2a,在实空间对未知区域的样品函数赋任意初值;
步骤D2b,选择样品上已知区域的一个已知瑞利分辨单元,选择与所述已知瑞利分辨单元相邻的未知区域的一个瑞利分辨单元作为待求瑞利分辨单元;
步骤D2c,计算样品在图像探测器上由待求瑞利分辨单元产生的衍射振幅分布;
步骤D2d,使用实测的图像探测器上待求瑞利分辨单元的实验散射强度曲线修正所述衍射振幅分布;
步骤D2e,将修正后的衍射振幅分布进行逆傅里叶变换,将其变换回实空间,得到样品上实空间内待求瑞利分辨单元的样品函数估计值;
步骤D2f,在实空间内,使用相邻的已知瑞利分辨单元的样品函数对所述待求瑞利分辨单元的样品函数估计值进行修正;
步骤D2g,判断该样品函数估计值是否收敛,如果是,则将该样品函数估计值作为所述待求瑞利分辨单元的样品函数,否则,执行步骤D2c。
12.根据权利要求11所述的实现显微镜系统超分辨成像的方法,其中,所述步骤D2g之后还包括:
将待求瑞利分辨单元作为已知的瑞利分辨单元,重复执行所述步骤D2b至D2g,至感兴趣区域内所有瑞利分辨单元的样品函数已知。
13.根据权利要求12所述的实现显微镜系统超分辨成像的方法,其中,当第一次执行步骤D2b时:已知区域为样品四周的空白区域。
14.根据权利要求11所述的实现显微镜系统超分辨成像的方法,其中,所述步骤D2b中:相邻的已知瑞利分辨单元和待求瑞利分辨单元的相互重叠的覆盖范围大于一个所述显微镜系统瑞利分辨单元宽度的1/4。
15.根据权利要求1至14中任一项所述的实现显微镜系统超分辨成像的方法,其中,所述显微镜为以下显微镜的一种:X射线显微镜、光学显微镜、电子显微镜或中子/伽马射线显微镜。
16.根据权利要求15所述的实现显微镜系统超分辨成像的方法,其中,所述显微镜为X射线全场显微镜;
所述光源为X射线光源;所述聚焦镜为管状聚焦镜;所述物镜为波带片物镜;所述图像探测器为X射线图像探测器。
说明书
技术领域
本发明涉及超分辨显微术(super-resolution microscopy)技术领域,尤其涉及一种实现X射线显微镜系统超分辨成像的方法。
背景技术
相对于传统光学显微镜、电子显微镜等技术,X射线显微镜具有独特的优势。X射线波长短,受衍射效应影响小,可以达到很高的分辨率,目前三维成像可以达到26nm的分辨率,二维成像可以达到12nm的分辨率。此外,X射线穿透能力强,具有对厚样品的内部结构进行无损成像的能力,可以有效地减少了样品的准备时间,而且成像机制多样,如吸收、相位、散射等,衬度来源丰富。因而X射线显微镜可以观察、分析多种微观物理、化学变化和微纳米结构的形貌。近年来,纳米分辨尺度的X射线显微镜在世界各个同步辐射光源(synchrotron radiation light source)上得到了快速的发展,成为纳米结构表征的一种重要工具。
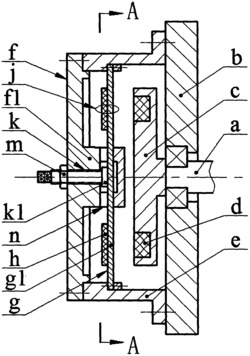
X射线显微镜中主要分为两类:X射线探针扫描显微镜(X-ray probe scanning microscopy)和X射线全场显微镜(X-ray full-field microscope),两类显微镜各有优劣。X射线探针扫描显微镜是将X射线聚焦成微米或纳米量级的微探针,不但可以对样品各点进行逐点扫描,而且可以对样品中任意一个点单独进行能量扫描,形成空间分辨谱学。因为是逐点获取样品数据,数据获取速度必须足够快,通过X射线微探针的光通量必须足够大,所以这类显微镜比较适合建在亮度高的第三代同步辐射光源上。X射线全场显微镜的结构如图1所示。它的原理与传统的光学显微镜相同,主要包括X光源、管状聚焦镜(condenser)、波带片(zone plate)物镜,以及X射线图像探测器。实验中可一次性地将样品的整体二维图像摄入图像探测器,无需扫描,故数据获取速度较快。当在此系统中加入相移环(phase ring)的时候,更可以对弱吸收样品进行高衬度的泽尼克(Zernike)相位衬度成像。X射线全场显微镜还可以与计算机断层重建技术(Computed Tomography,简称CT)相结合,形成X射线纳米分辨三维成像。同时X射线全场显微镜的优势还在于它不仅可以建立在第一、二代同步辐射光源上,还可以使用常规X射线光源。上述特性的存在使得X射线全场显微镜相对于X射线探针扫描显微镜在三维无损成像方面具有巨大的优势和广阔的应用前景。
现有的纳米分辨尺度的X射线全场显微镜均使用波带片作为成像元件。根据光学衍射原理,X射线全场显微镜的空间分辨率主要取决于波带片。由简单计算可知,波带片数值孔径(Numerical Aperture,简称NA)所决定的分辨率约等于波带片的最外环宽度。由于受限于当前的微纳米加工技术,现有X射线全场显微镜的分辨率在一般在几十nm左右,仍然不能满足几个nm大小的微小结构的研究需求,例如纳米科学中的纳米结构三维形貌研究以及生命科学中的亚细胞体系(sub-cellular structures)的无损三维成像。另一方面,X射线全场显微镜主要依靠X射线穿过样品时候的吸收或相位变化进行成像。泽尼克(Zernike)相位衬度成像虽然对于弱吸收物质的图像衬度有一定程度的改善,但是仍然不是十分理想,且相位衬度成像依然是一种非定量的成像方法,这些问题的存在使得X射线全场显微镜依然不适用于细胞、材料等领域的研究。因此如何在现有X射线全场显微镜装置中,实现更高分辨率和高衬度的X射线成像方法成为人们研究的课题。
为了超越光学元件的限制,获得更高的分辨率,需要使用超分辨技术。现有的超分辨技术根据实现原理上可以分为两类:近场超分辨显微技术(near-field super-resolution microscopy),以及使用荧光(fluorescence)的远场超分辨显微技术。其中,近场显微术绕过了光波的空间传播过程,不受到衍射的限制,能够实现小于波长量级的探测。但是由于依赖光波的近场特性,近场显微镜的工作距离被限制在一个波长之内,无法实现样品的3D体成像,而且一般需要通过二维的扫描过程来获得整幅图像。另一方面,基于荧光技术的远场超分辨显微术依靠荧光染料的光吸收/发射特性(photon absorption/emission),通过探测由荧光染料分子激发后产生的光信息,也能够实现超越波长极限的分辨率。
然而,上述两种方法均不适用于X射线全场显微镜:对于近场超分辨技术,X射线的极短波长使得其近场范围在若干个纳米量级,不能用于显微结构表征;对于荧光超分辨技术,由于需要对样品进行荧光染色,且荧光染料需要特定的波长激发,无法应用于X射线波段,也不能体现X射线全场显微镜的原位成像(in-situ imaging)和免扫描(全场)成像的优势。所以现阶段的纳米分辨尺度的X射线显微镜仍然没有实现超分辨成像的方法,不能有效地满足纳米科学、生命科学等领域的需求。
发明内容
(一)要解决的技术问题
针对上述问题,本发明提供了一种实现显微镜系统超分辨成像的方法,以在现有的显微镜系统硬件基础上尽可能提高分辨率,获取更多的微观结构信息。
(二)技术方案
根据本发明的一个方面,本发明公开了一种实现显微镜系统超分辨成像的方法。该方法包括:该方法基于一包括光源、聚焦镜、物镜和图像探测器的显微镜系统,包括:搭建显微镜系统;改变显微镜系统中聚焦镜的数值孔径,采集样品的分别对应不同聚焦镜数值孔径的至少两张暗场像;在至少两张暗场像中分别提取对应像素的散射强度值,构造以聚焦镜数值孔径为自变量,以所提取的散射强度值为因变量的实验散射强度曲线;由实验散射强度曲线获得样品上瑞利分辨单元内部亚分辨尺度的微观结构信息,实现显微镜的超分辨成像。
(三)有益效果
本发明实现显微镜系统超分辨成像方法具有以下有益效果:
1、本发明中,由若干幅暗场像取得散射强度曲线,通过与已知尺寸的微观孔洞/微粒的散射强度曲线进行拟合,可以获得样品上瑞利分辨单元内的微观孔洞/微粒的粒径;
2、本发明中,采用迭代方法,由若干幅暗场像通过散射强度图像重构,可以获得样品上瑞利分辨单元内的样品函数。
附图说明
图1为现有技术X射线显微镜的结构示意图;
图2为本发明实施例实现显微镜系统超分辨成像方法的流程图;
图3为本发明实施例实现显微镜系统超分辨成像方法中改变聚焦镜数值孔径方式的示意图,其中,在图3a和图3b中,分别采取更换聚焦镜和改变环形光阑半径的方式改变聚焦镜数值孔径;
图4为本发明实施例实现显微镜系统超分辨成像方法中通过图3a所示的方式获得样品暗场像的示意图,其中:图4(a)为样品的示意图;图4(b)-图4(e)为聚焦镜数值孔径由小变大时得到样品的多张暗场像;
图5为本发明实施例实现显微镜系统超分辨成像方法中采用理论模拟的方法获取的三种粒径的微观孔洞/微粒的参照散射强度曲线;
图6为本发明实施例实现显微镜系统超分辨成像方法中样品上单个瑞利分辨单元内部样品函数重构步骤的流程图。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚明白,以下结合具体实施例,并参照附图,对本发明进一步详细说明。需要说明的是,虽然本文可提供包含特定值的参数的示范,但应了解,参数无需确切等于相应的值,而是可在可接受的误差容限或设计约束内近似于所述值。
本发明在现有显微镜的基础上,通过改变聚焦镜的数值孔径,获取样品的一系列暗场像。这些暗场像反映了样品中每一点处的精细结构在不同入射角下的轴向散射强度,利用这些散射信息获得显微镜的每个瑞利分辨单元(Rayleigh Resolution Element,简称RRE)内部的样品形貌特征信息。
在本发明的一个示例性实施例中,提供了一种实现显微镜系统超分辨成像的方法。图2为本发明实施例实现显微镜系统超分辨成像方法的流程图。如图2所示,本实施例包括:
步骤A,搭建显微镜光路;
本步骤包括:设置显微镜中光源、聚焦镜、样品、物镜和图像探测器的位置,使光源发出的光经过聚焦镜的会聚作用后形成聚焦光束照射在样品上,经过样品的聚焦光束经过物镜后投影至图像探测器。在初始状态下,聚焦镜的数值孔径(NAc)可以等于物镜的数值孔径(NAo),样品在探测平面形成明场像。此时,显微镜系统的瑞利分辨率决定于波带片的最外环直径dr和系统的几何放大率M=像距/物距。
在初始状态下,设置聚焦镜的数值孔径等于物镜的数值孔径只是为了便于调整显微镜系统中除聚焦镜之外的其他光学元件的位置。当然,如果显微镜系统中除聚焦镜之外的其他光学元件的位置和光学参数已知,就可以直接采用数值孔径大于物镜数值孔径的聚焦镜来设置光路,执行步骤B来获取样品对应不同数值孔径的暗场像。
本实施例对显微镜的类型没有特殊要求。除X射线全场显微镜外,其原理也可应用于其他波长的小数值孔径显微镜系统,如可见光显微镜、电子显微镜、中子/伽马射线显微镜等。以图1所示的X射线显微镜为例,各种类型的显微镜均包括以下部分:
1、光源,用于对整个成像装置提供照明。
在X射线全场显微镜中,X光源可以使用同步辐射光源、实验室X光源或者其他的准单色商用X光源。传统的纳米分辨尺度的X射线显微镜的X射线能量典型值在0.2-20keV。
在除X射线显微镜之外的其他类型的显微镜中,如在可见光显微镜中,光源为可见光;在电子显微镜中,光源为电子枪;在中子/伽马射线显微镜中,光源为中子/伽马射线发射装置。
2、聚焦镜,用于将光源产生的光线会聚为环状照明光以照明样品。
在X射线全场显微镜中,聚焦镜一般采用管状聚焦镜,利用X射线的全反射原理形成会聚的二级照明光。样品放置在聚焦镜的焦点处。
如图1所示,在传统的X射线显微镜中,聚焦镜的中央还包括一个圆形的光束遮挡器(beam stop),其直径稍小于聚焦镜的出口数值孔径(exit NA),从而可以使聚焦镜的出瞳(exit pupil)呈环形,会聚产生的光束呈空心锥形。另外,由于X射线的强穿透性,一般还需要在聚焦镜的焦平面前放置一个小孔(pinhole)以滤除直通光的影响,此处的小孔是另外的独立元件,与聚焦镜或环形光阑无关。
在除X射线显微镜之外的其他类型的显微镜中,聚焦镜应当是与光源相对应的具有成像作用的透镜元件。在可见光显微镜中,聚焦镜应当为凸透镜;在电子显微镜的情况下,聚焦镜可以为静电场或电磁透镜。在中子/伽马射线显微镜的情况下,聚焦镜可以为中子/伽马射线衍射聚焦元件,如波带片。
3、物镜,用于利用经过样品后的X射线对样品进行成像。
在X射线全场显微镜中,最为常用的物镜即为菲涅耳(Fresnel)波带片透镜。在纳米分辨X射线显微镜中,物镜与样品的距离,即物距,比1倍焦距稍长,从而可以在物镜后方形成放大的倒立实像,进而被图像探测器获取。
同样的,在除X射线显微镜之外的其他类型的显微镜中,物镜应当是与光源相对应的具有成像作用的透镜元件。在可见光显微镜的情况下,物镜可以为一般的凸透镜。在电子显微镜的情况下,物镜为静电场或电磁透镜。在中子/伽马射线显微镜的情况下,物镜可以为中子/伽马射线衍射聚焦元件,如波带片。
4、图像探测器,用以采集由上述物镜所成的样品图像。
在X射线全场显微镜中,图像探测器放置在物镜波带片的像平面上。本实施例中,由于一般样品的高角度散射强度较小,需要曝光较长时间才能形成有效的暗场像,故需要本底噪声尽量低的图像探测器。
在除X射线显微镜之外的其他类型的显微镜中,图像探测器应当是能够工作在光源波长下的图像获取装置。在可见光显微镜的情况下,图像探测器可以为一般的CCD或CMOS阵列探测器。在电子显微镜的情况下,图像探测器可以为半导体探测器或闪烁体探测器(scintillation detector)。在中子/伽马射线显微镜的情况下,图像探测器可以为闪烁体探测器。
步骤B,改变聚焦镜的数值孔径,采集样品的对应不同聚焦镜数值孔径NAc的至少两张暗场像;
如在步骤A中所述,在初始状态下,聚焦镜的数值孔径NAc等于物镜的数值孔径NAo,样品在探测平面形成明场像。而在本步骤中,保持显微镜系统中光源、物镜和图像探测器的位置和光学参数不变,样品和聚焦镜的位置不变,分次逐步增加聚焦镜的数值孔径NAc。采集对应不同聚焦镜数值孔径NAc(NAc>NAo)时的样品暗场像。以下给出两种改变聚焦镜数值孔径NAc的方法:
(1)将原聚焦镜更换为数值孔径更大的聚焦镜,如图3a所示;
在更换更大数值孔径NAc的聚焦镜的同时,还可以增大光束遮挡器的直径以保持聚焦镜的出射光瞳不变,从而形成半径更大而宽度不变的环形照明光。本领域技术人员应当清楚:如果不增大光束遮挡器直径的话,则可能引起光强度的测量精度变差。本领域技术人员应当很容易理解并实现此种技术方案,此处不再详细说明。
(2)在初始聚焦镜的数值孔径NAc′范围较宽时,可以不更换聚焦镜,只在聚焦镜后方更换不同半径的环形光阑(annular aperture),以滤出不同数值孔径的环形出射光,如图3b所示;
以初始聚焦镜的数值孔径NAc′>3NAo为例,通过使用不同半径的环形光阑,就可以滤出数值孔径NAc介于NAo和3NAo之间的环形出射光。为了扩大聚焦镜数值孔径的调整范围,优选地,初始聚焦镜的数值孔径NAc′>5NAo。同时,为了方便调节,采用可快速更换环形光阑的装置。
通常情况下,聚焦镜数值孔径NAc很小,为毫弧度量级,因此可直接使用照明光锥的半顶角θc代替。由于聚焦镜的数值孔径大于物镜的数值孔径,穿过样品后的光线偏离了物镜的边缘,物镜只能收集到一部分散射光,从而在图像探测器上形成了样品暗场像。随着聚焦镜的数值孔径NAc不断变大,图像探测器上可以获得多张样品暗场像。
本步骤中,为了达到N倍的超分辨效果,聚焦镜数值孔径NAc的变化范围需要覆盖N倍的物镜数值孔径NAo。优选地,以等间距逐步增大聚焦镜的数值孔径,获取对应3-5个聚焦镜数值孔径的样品暗场像。
图4为本发明实施例实现显微镜系统超分辨成像方法中通过图3a所示的方式获得样品暗场像的示意图。其中图4(a)为样品的示意图,图4(b)-图4(e)为聚焦镜数值孔径由小变大时得到的图像暗场像。如图4(b)-图4(e)所示,图像探测器内的每个像素的光强会随着聚焦镜数值孔径NAc的增加,接收到从低频到高频的样品的散射信息。
步骤C,在至少两张暗场像中分别提取对应像素的散射强度值,构造以聚焦镜数值孔径为自变量,以所提取的散射强度值为因变量的实验散射强度曲线;
当样品暗场像为一张时,每个像素所对应的散射强度信息为一单点数值。当样品暗场像为大于或等于两张时,每个像素所对应的散射强度信息可以组成一条以聚焦镜数值孔径为自变量,以所提取的散射强度值为因变量的曲线(直线可以看作是曲线的一种特殊形式),称为散射强度曲线,又称SDFI曲线,如图5所示。每个像素所对应的SDFI曲线是超分辨成像的原始数据。
根据光学理论,图像探测器上位于 处的像素 是以图像探测器中心为原点的二维坐标向量),其光强I随着照明半顶角θc的变化规律为:
其中,Rc代表管状聚焦镜的出瞳函数(一般为环形),d0代表样品至波带片物镜的距离,Azp表示物镜的振幅传递函数,ts表示样品的透射率函数,M表示系统放大率,FT表示二维傅立叶变换操作,θc为照明半顶角,可以将其作为聚焦镜的数值孔径NAc。
步骤D,由实验散射强度曲线获得样品上瑞利分辨单元内部亚分辨尺度的微观结构信息,实现显微镜的超分辨成像。下文中以两种典型的应用为例,对样品上瑞利分辨单元内部亚分辨尺度的微观结构信息的获取过程进行具体描述。
在第一种应用中,为了确定单个瑞利分辨单元内部的样品微观尺寸信息,步骤D可以包括以下子步骤:
步骤D1a,经过实验测试或理论模拟,获取不同粒径的微观孔洞/微粒对应的参照散射强度曲线,以建立参照散射强度曲线数据库;
需要说明的,如果仅需要少数散射强度点的话,采用步骤A-步骤C来获取参照散射强度曲线的散射强度值是可行的,在这种情况下,主要以标准孔径的测试结果为基准绘制散射强度曲线。
如果要绘制如图6所示的一整条曲线,即非常多的数据点,则优选地采用理论模拟的方法。该理论模拟曲线可以使用上述公式1直接求得。此外,本步骤的实施需要预先对亚分辨结构的粒度大小有预先估计,然后在参照散射光强曲线上选择3-5个散射强度峰值对应的数值孔径位置获取暗场像。
步骤D1b,采用样品散射强度曲线数据库中不同粒径的微观孔洞/微粒的多条参照散射强度曲线分别对实验散射强度曲线进行拟合;
步骤D1c,确定与实验散射强度曲线拟合最优的参照散射强度曲线,该参照散射强度曲线对应的粒径即为样品上微观孔洞/微粒的粒径。
图5为本发明实施例实现显微镜系统超分辨成像方法中三种粒径微观孔洞/微粒的散射强度曲线。图中三条曲线分别为直径5nm,10nm,15nm的三种微观孔洞/微粒的散射强度曲线。因此,可在离散的情况下,在有限的范围内变化聚焦镜的数值孔径,例如在θ1,θ2,θ3三个不同的聚焦镜数值孔径条件下,分别获得这些区域的散射强度信息。这些数据各自的光强相对变化规律即是散射强度曲线上的θ1,θ2,θ3三个点的相对强度值。如果事先能够得知样品中仅含有这三种颗粒(如小角散射技术),即可区分5nm、10nm、15nm球状颗粒。
为了提高测量的精度,在步骤D1b中可以尽量多地拍摄照片,以提高散射强度曲线的精度。此外,还可以采取多个粒径进行平均的方法,具体为:
步骤C中,在至少两张暗场像中分别提取多个对应像素,优选为全部对应像素,的散射强度值,构造多条实验散射强度曲线;
步骤D中,采用多条参照散射强度曲线分别对所述多条实验散射强度曲线进行拟合;分别确定与该多条实验散射强度曲线拟合最优的参照散射强度曲线;获得对应多条实验散射强度曲线的多个微观孔洞/微粒粒径;通过对该多个微观孔洞/微粒粒径进行平均或采用最大概率法获得样品上微观孔洞/微粒的最终粒径。
由于X射线全场显微镜中的样品被部分相干光照明,最终获得的数字图像中的相邻瑞利分辨单元之间存在有一定的关联性。通过使用迭代方法,可以进一步由相邻瑞利分辨单元内的像素光强变化曲线定位每个瑞利分辨率单元内的微结构。本步骤中的采样要求与第一种应用不同,需要使聚焦镜NA的覆盖范围尽量连续。这可以通过使用更大Δθc的聚焦镜实现,也可以通过增加拍摄张数来实现。
在第二种应用中,是实现样品上单个瑞利分辨单元内部的样品微观形貌信息的重构,需要注意的是:这种方法针对的是视场内的每一个瑞利分辨单元,所以完整的超分辨定位需要首先在样品中具有已知区域,例如样品四周的空白部分,从而可以将已知区域逐步扩散至整个视场。图6为本发明实施例实现显微镜系统超分辨成像方法中实现样品上单个瑞利分辨单元内部的样品微观形貌信息重构的流程图。如图6所示,该步骤包括以下子步骤:
步骤D2a,在实空间对未知区域的样品函数赋任意初值;
步骤D2b,选择样品上已知区域的一个已知瑞利分辨单元,选择与所述已知瑞利分辨单元相邻的未知区域的瑞利分辨单元作为待求瑞利分辨单元
步骤D2c,通过夫琅和费衍射原理以及公式(1)计算样品在图像探测器上由待求瑞利分辨单元产生的衍射振幅分布;
步骤D2d,使用实测的图像探测器上待求瑞利分辨单元的散射强度曲线修正上述衍射振幅分布;
步骤D2e,将修正后的衍射振幅分布逆傅里叶变换回实空间,得到样品上实空间内待求瑞利分辨单元的样品函数估计值;
步骤D2f,在实空间内,使用相邻的已知瑞利分辨单元内的样品函数对待求瑞利分辨单元的样品函数进行修正,即将已知瑞利分辨单元的样品函数赋值给它与本瑞利分辨单元共同覆盖到的区域。本步骤要求相邻的已知瑞利分辨单元与该待求瑞利分辨单元的覆盖范围有至少1/4个瑞利分辨单元宽度的重叠;
步骤D2g,判断该样品函数估计值是否收敛,如果是,则将该样品函数估计值作为所述待求瑞利分辨单元的样品函数,否则,执行步骤D2c,即重复进行步骤D2c-步骤D2f,直至待求瑞利分辨单元的样品函数估计值收敛,即待求瑞利分辨单元成为已知区域的一部分;
步骤D2h,将待求瑞利分辨单元作为已知的瑞利分辨单元,重复执行所述步骤D2b至D2g,至感兴趣区域内所有瑞利分辨单元的样品函数已知。
综上所述,本发明将样品的散射强度分布与散射体的几何结构和电子密度相关,利用全场显微成像技术在获得样品暗场成像,进而收集样品的散射强度信息。利用散射强度信息将不同形状、不同尺寸的样品与不同的散射强度曲线相对应,从而进行超过显微镜系统极限分辨率的样品信息的获取。因此本方法对于在现有波带片加工工艺受限,无法进一步提高X射线全场显微镜成像分辨率的条件下,突破了成像设备的瑞利分辨率极限,降低人们对于波带片加工工艺的依赖性。
本发明对于X射线全场显微镜在生物医学、材料学上的应用具有重要的价值。此外,本发明中的方法不依赖于X射线本身的特性,因此也可以应用至其他小数值孔径的成像系统以进一步提升分辨率,如可见光显微镜、全场电子显微镜、以及中子/伽马射线显微镜等,并提升其分辨率至若干个波长量级。
以上所述的具体实施例,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
实现显微镜系统超分辨成像的方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。





动态评分
0.0