









专利摘要
一种电气元件技术领域的摇摆式电磁型微继电器,包括:转子永磁片、轴、转子软磁片、定子绕组、悬臂梁、外壳、触头、封盖、开口、定位销、引线接点、馈电触点,转子软磁片作为转子永磁片的衬底,转子永磁片和转子软磁片相叠合,两者构成转子,转子和定子绕组通过轴相连接,在外壳内设有叠层结构电磁微马达,在悬臂梁顶端设有触头,在封盖的中心部位设有开口,在开口的两端分别设有两个定位销,引线接点和馈电触点分别位于两个定位销的外侧。本发明能借助磁性转子在定子平面内作往复扭摆转动,操纵机械触点接通或断开电路,使悬臂梁的运动阻尼由压膜阻尼变成滑膜阻尼,有效改善大气环境下微机械继电器的响应特性。
权利要求
1、一种摇摆式电磁型微继电器,包括:悬臂梁(5)、外壳(6)、触头(7)、封盖(8)、开口(9)、定位销(10)、引线接点(11)、馈电触点(12),其特征在于,还包括:转子永磁片(1)、轴(2)、转子软磁片(3)、定子绕组(4),转子永磁片(1)、轴(2)、转子软磁片(3)、定子绕组(4)、悬臂梁(5)组成叠层结构电磁微马达,转子软磁片(3)作为转子永磁片(1)的衬底,转子永磁片(1)和转子软磁片(3)相叠合,两者构成转子,转子和定子绕组(4)通过轴(2)相连接,在转子软磁片(3)的边缘上设有悬臂梁(5),在外壳(6)内设有叠层结构电磁微马达,在悬臂梁(5)顶端设有触头(7),在封盖(8)的中心部位设有开口(9),在开口(9)的两端分别设有两个定位销(10),引线接点(11)和馈电触点(12)分别位于两个定位销(10)的外侧。
2、根据权利要求1所述的摇摆式电磁型微继电器,其特征是,所述的转子永磁片(1)是均分成若干大于零的偶数的微型扇区,磁片按照垂直于圆形表面方向磁化,使相邻两个微型扇区之间磁场方向相反,或者是分别加工的扇形磁片,按照同样极性排列方式拼接形成转子永磁片。
3、根据权利要求1或者2所述的摇摆式电磁型微继电器,其特征是,所述的转子永磁片(1)的结构与转子软磁片(3)相同。
4、根据权利要求1所述的摇摆式电磁型微继电器,其特征是,所述的定子绕组(4)是在一个环形衬底上的平面线圈组合,其分区个数与转子的分区数相关,每一个绕组是单层多线圈绕组,这种单层多线圈的绕阻构成定子,其径向尺寸比转子的大0.1~0.2mm,定子内设有接通驱动电源的接线点,该接线点为方形。
5、根据权利要求1所述的摇摆式电磁型微继电器,其特征是,所述的轴(2)上设有定子的台阶。
6、根据权利要求1所述的摇摆式电磁型微继电器,其特征是,所述的触头(6)或者是平直的双股叉形状,或者是弯曲的双股叉形状。
说明书
技术领域技术领域
本发明涉及的是一种电气元件技术领域的继电器,具体地说,是一种摇摆式电磁型微机电系统继电器。
技术背景背景技术
与传统机电继电器比较,MEMS(即微机电系统)继电器具有体积小、功耗低、响应快、隔离度高、负载能力强的特点,并且最终可以实现类似半导体技术的集成制造,因此受到重视,基于不同驱动原理的多种MEMS继电器相继在实验室研制成功,并展示出预期的良好特性和诱人的实用化前景,其中静电和电磁驱动MEMS继电器最具代表性。
经对现有技术的文献检索发现,在《传感器和执行器》,A91(2001)346-350中的《闭锁式微电磁继电器》文中,M.Ruan等人指出:该MEMS微电磁继电器设计采用软磁合金材料(铁镍)悬臂梁的结构形式,利用嵌入衬底内的电磁线圈在通电后产生的电磁力使悬臂梁向衬底运动;断电后,通过悬臂梁本身的弹性来使悬臂梁恢复平衡状态来实现悬臂梁向面外运动的状态,从而实现对外电路通断的控制。但是,当悬臂梁与基底(对电极)之间距离小到一定程度之后,压膜阻尼将会使其运动特性受到显著制约,大气环境下的响应速度会受到极大限制,而真空封装是众所周知的技术难题,所以,简单悬臂梁结构的MEMS继电器面临挑战,各种新颖结构形式的微机械继电器设计不断被提出。
发明内容发明内容
本发明的目的在于克服现有技术中的不足,提供一种摇摆式电磁型微继电器,使其能借助磁性转子在定子平面内作往复扭摆转动,操纵机械触点接通或断开电路,使悬臂梁的运动阻尼由压膜阻尼变成滑膜阻尼,有效改善大气环境下微机械继电器的响应特性。
本发明是通过以下的技术方案来实现的,本发明包括:转子永磁片、轴、转子软磁片、定子绕组、悬臂梁、外壳、触头、封盖、开口、定位销、引线接点、馈电触点。其中,转子永磁片、轴、转子软磁片、定子绕组、悬臂梁组成叠层结构电磁微马达。在叠层结构电磁微马达中,转子软磁片作为转子永磁片的衬底,转子永磁片和转子软磁片相叠合,两者构成转子,转子和定子绕组通过轴相连接,在转子软磁片的边缘上设有悬臂梁。在外壳内设有叠层结构电磁微马达,在悬臂梁顶端设有触头,在封盖的中心部位设有开口,以供悬臂梁伸出,在开口的两端分别设有两个定位销,用于悬臂梁往复运动的定位和磁性锁定,引线接点和馈电触点分别位于两个定位销的外侧,引线接点与触头同时实现通断控制触点。
所述的转子永磁片是中间有孔的圆片永磁体,均分成若干大于零的偶数的微形扇区,磁片按照垂直于圆形表面方向磁化,使相邻两个微形扇区之间磁场方向相反,或者是分别加工的扇形磁片,按照同样极性排列方式拼接形成转子永磁片。
所述的转子永磁片的结构与转子软磁片相同。
所述的定子绕组是在一个环形衬底上的平面线圈组合,其分区个数与转子的分区数相关,每一个绕组是单层多线圈绕组,这种单层多线圈的绕阻构成定子,其径向尺寸比转子的大0.1~0.2mm,定子内设有接通驱动电源的接线点,该接线点为方形。
所述的轴上设有定子的台阶,以提供定位功能。
所述的转子软磁片是中间有孔的圆片,其形状与转子永磁片相同。
所述的悬臂梁,其材料是软磁材料,悬臂梁可以将转子的运动延伸到圆片的外部,悬臂梁用于操纵触头,接通或者断开外接电路。
所述的触头或者是双股叉形状的平直薄膜,为了接触稳定性,触头或者是移动弯曲的双股叉形状,形成刚度与弹性之间的平衡。触头的前端在悬臂梁落下时,与引线接点接触而形成导通,抬起触头则断开外接电路。
所述的定位销,其材料是永磁体,对悬臂梁具有一定吸力,可以实现悬臂梁的断电姿态保持。
给叠层结构电磁微马达施加一定的直流电,转子就会向一个方向旋转,带动悬臂梁向同一个方向转动,如果颠倒电流的方向,转动方向也将改变,当叠层结构的电磁微马达被封入单体外壳之后,由于开口尺寸的限制,悬臂梁只能够运动一定步长,就会被定位销固定,反方向亦然,这样,反复切换电流方向就会形成悬臂梁的往复摆动,并且能够在定位销处靠永磁吸力实现断电姿态保持。通过操纵触头去接通或者断开外接电路就构成了一个继电器。
本发明的有益效果是:采用电磁型马达的转动的方式来控制悬臂梁上的触头运动;并将触头制作成具有可移动弯曲的薄膜形状,构成刚度与弹性之间的平衡,增大了触点间接触的稳定性,使悬臂梁的运动阻尼由压膜阻尼变成滑膜阻尼,有效改善了大气环境下微机械继电器的响应特性。另外,悬臂梁用软磁材料制作,单步转动后被定位销固定,并在断电后靠永磁力吸住,从而实现悬臂梁的无功耗姿态保持。
附图说明附图说明
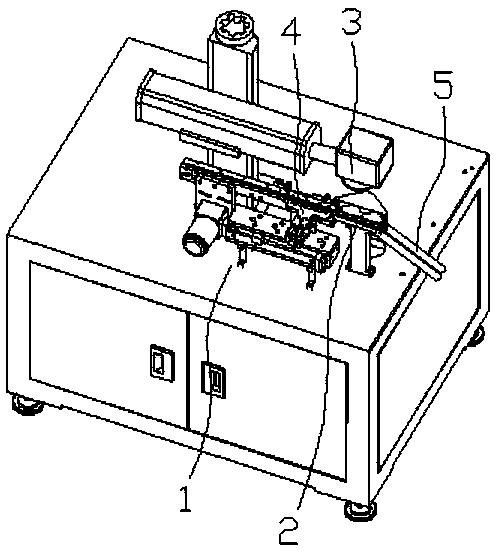
图1是叠层结构微马达的结构示意图
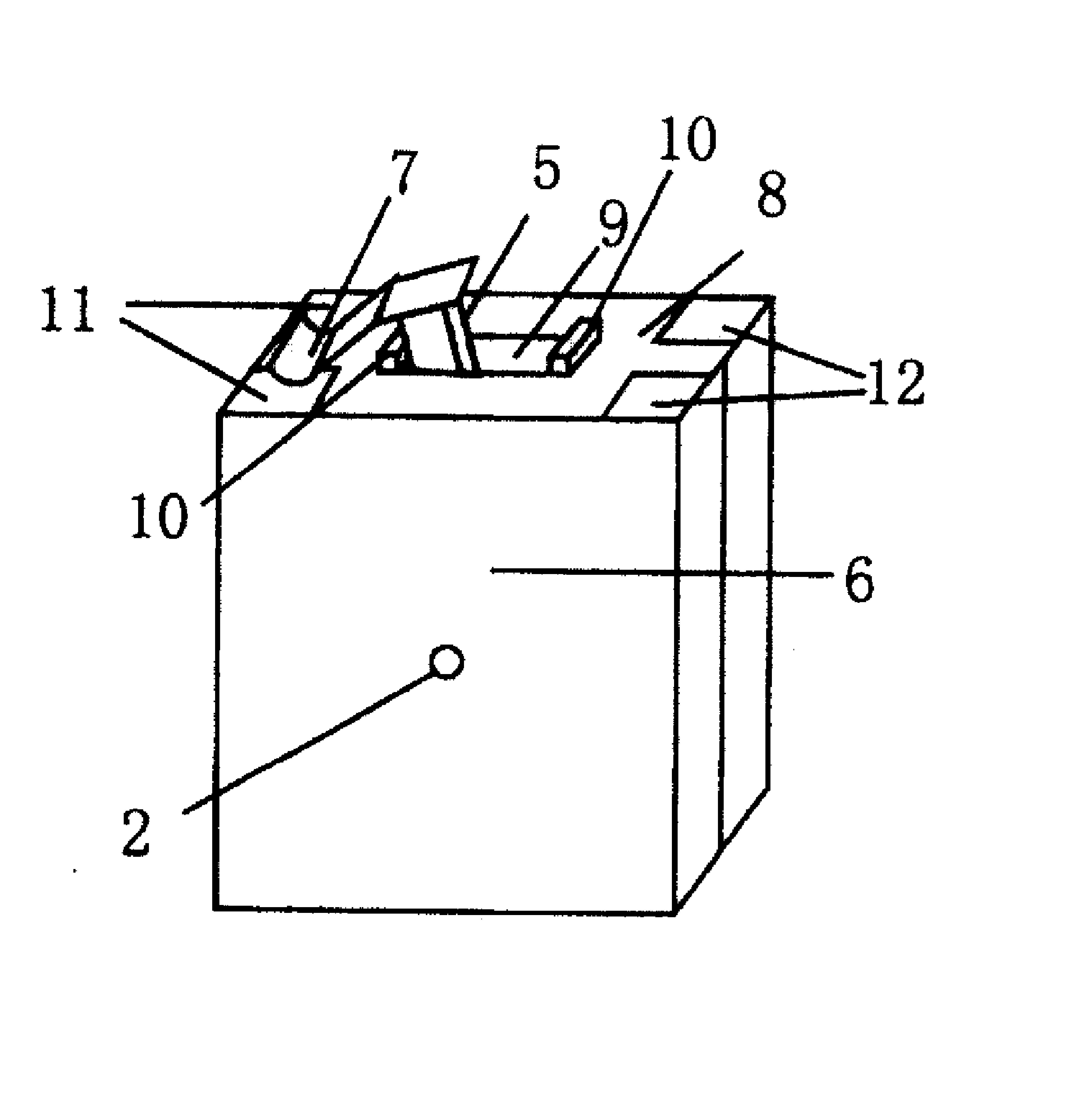
图2是本发明结构示意图
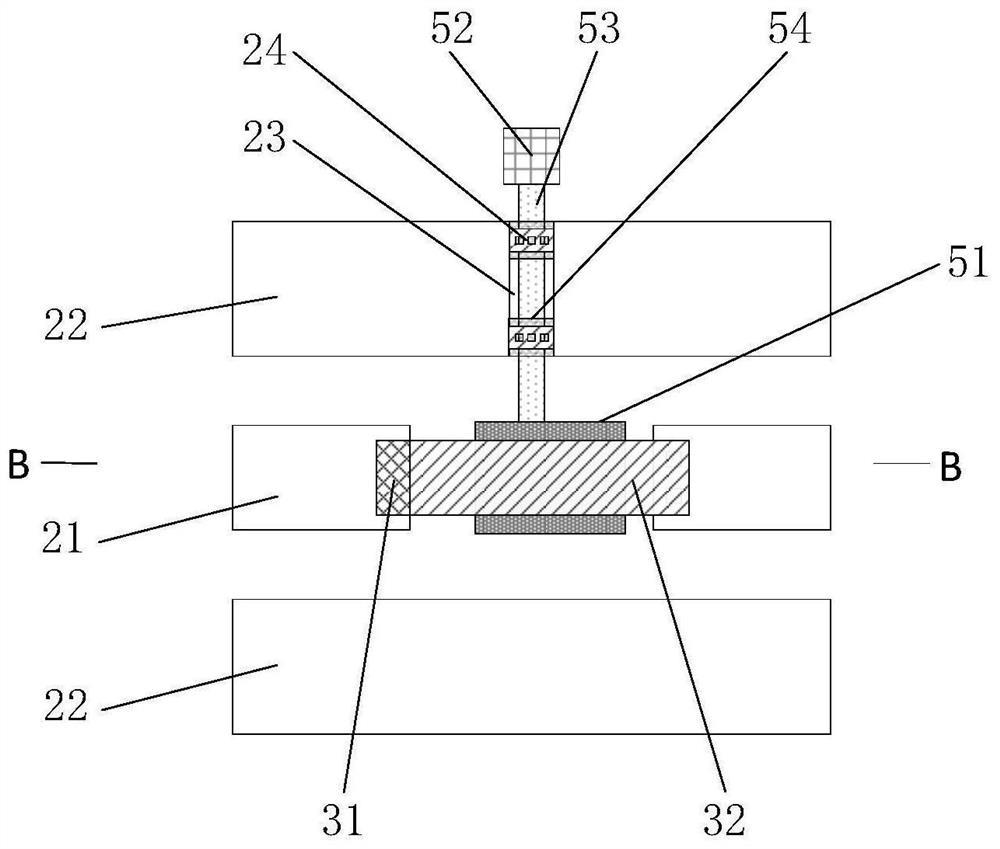
图3是本发明的剖面图
具体实施方式具体实施方式
如图1、2、3所示,本发明包括:转子永磁片1、轴2、转子软磁片3、定子绕组4、悬臂梁5、外壳6、触头7、封盖8、开口9、定位销10、引线接点11、馈电触点12。其中,转子永磁片1、轴2、转子软磁片3、定子绕组4、悬臂梁5组成叠层结构电磁微马达。转子软磁片3作为转子永磁片1的衬底,转子永磁片1和转子软磁片3相叠合,两者构成转子,转子和定子绕组4通过轴2相连接,在转子软磁片3的边缘上设有悬臂梁5。在外壳6内设有叠层结构电磁微马达,在悬臂梁5顶端设有触头7,在封盖8的中心部位设有开口9,在开口9的两端分别设有两个定位销10,引线接点11和馈电触点12分别位于两个定位销10的外侧。
所述的转子永磁片1是中间有孔的圆片永磁体,均分成若干大于零的偶数的微型扇区,磁片按照垂直于圆形表面方向磁化,使相邻两个微型扇区之间磁场方向相反,或者是分别加工的扇形磁片,按照同样极性排列方式拼接形成转子永磁片。
所述的转子永磁片1的结构与转子软磁片3相同。
所述的定子绕组4是在一个环形衬底上的平面线圈组合,其分区个数与转子的分区数相关,每一个绕组是单层多线圈绕组,这种单层多线圈的绕阻构成定子,其径向尺寸比转子的大0.1~0.2mm,定子内设有接通驱动电源的接线点,该接线点为方形。
所述的轴2上设有定子的台阶。
所述的触头6或者是平直的双股叉形状,或者是弯曲的双股叉形状。
摇摆式电磁型微机电系统继电器专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。




动态评分
0.0