








专利摘要
本公开提供了一种驱动轮组件及消防机器人,驱动轮组件包括:由轮体和轮轴组成的弹性轮,轮体上设置有轮轴孔;连接轴组件,包括连接轴、第一销轴和过渡轴套,连接轴的一端上设置有第一安装孔,连接轴的另一端插入并固定到轮轴孔内,过渡轴套的第一端侧壁上设有第一通孔,过渡轴套的第一端间隙安装在第一安装孔内,过渡轴套的第一端和连接轴通过第一销轴进行铰接;电机组件,包括电机,电机的电机轴插入到过渡轴套的第二端内,并与过渡轴套的第二端驱动连接。该技术方案的连接轴组件相对电机轴来说就构成了一个既能够用来传递扭矩又具有柔性的十字连接轴系统,这样便实现了抗冲击和传递扭矩力两种功能,从而使得机器人的结构更紧凑,节省了空间。
权利要求
1.一种驱动轮组件,用于消防机器人,其特征在于,包括:
弹性轮,所述弹性轮由轮体和轮轴组成,所述轮轴设置在所述轮体的内轮侧面上,并凸出所述轮体的内轮侧面,所述轮体上设置有贯穿所述轮体和所述轮轴的轮轴孔,所述轮体与所述轮轴之间通过弧形过渡部进行过渡连接,所述轮体的轮毂、轮辐和轮圈为一体式结构;
连接轴组件,包括连接轴、第一销轴和过渡轴套,所述连接轴的一端上设置有第一安装孔,所述连接轴的另一端插入并固定到所述轮轴孔内,所述过渡轴套的第一端侧壁上设置有第一通孔,所述过渡轴套的第一端间隙安装在所述第一安装孔内,所述连接轴上设置有与所述第一通孔同轴且大小形状相同的第二通孔,所述第一销轴的一端穿过所述第二通孔并从所述第一通孔伸出,以使所述过渡轴套的第一端和所述连接轴通过所述第一销轴进行铰接;
电机组件,包括电机,所述电机的一端上设置有电机轴,所述电机轴的一端插入到所述过渡轴套的第二端内,并与所述过渡轴套的第二端驱动连接。
2.根据权利要求1所述的驱动轮组件,其特征在于,
所述轮轴孔包括设置在所述轮体内的第一轴孔和设置在所述轮轴内的第二轴孔,所述电机轴和所述过渡轴套的第二端在所述第二轴孔内驱动连接。
3.根据权利要求2所述的驱动轮组件,其特征在于,
所述第一安装孔的内壁面由第一弧形面和第一传动平面组成,所述过渡轴套的外壁面包括对称设置的两个第二传动平面,两个所述第二传动平面之间通过第二弧形面连接,且所述第一传动平面的宽度小于所述第二传动平面的宽度,所述第一弧形面的宽度大于所述第二弧形面的宽度,和/或
所述过渡轴套与所述电机轴配合的一端内设置有传动孔,所述传动孔的内壁面包括对称设置的两个第三传动平面,两个所述第三传动平面之间通过第三弧形面连接,所述电机轴与所述过渡轴套配合的一端上对称设置有两个第四传动平面,两个所述第四传动平面之间通过第四弧形面连接,且第三传动平面的宽度小于第四传动平面的宽度,第三弧形面的宽度大于第四弧形面的宽度。
4.根据权利要求1所述的驱动轮组件,其特征在于,所述电机组件还包括电机安装座,所述电机安装座套设安装在所述电机设置有电机轴的一端,所示驱动轮组件还包括:
轮端固定座,位于所述弹性轮设置有所述轮轴的一侧,安装至所述电机安装座,所述轮端固定座上设置有沿所述轮体的轴向方向分布的轴承安装孔;
外轴承套,所述外轴承套包括第一端板和第一轴套,所述第一端板安装在所述轮端固定座靠近所述轮体的面上,所述第一轴套设置在第一端板上并能够转动地安装在所述轴承安装孔内;
内轴承套,所述内轴承套包括第二端板和设置在所述第二端板一侧的第二轴套,所述第二轴套插入安装到所述第一轴套内,所述第二轴套与所述第一轴套之间为过盈配合,且所述第二端板固定安装至所述第一轴套远离所述第一端板的一端的端面上;
其中,所述第二轴套上设有多个沿轴向方向设置的条形缺口,多个条形缺口沿所述第二轴套的周向方向等间隔设置,所述轮轴插入安装到所述第二轴套内,与所述第二轴套驱动连接。
5.根据权利要求4所述的驱动轮组件,其特征在于,
所述第二端板通过多个螺钉固定安装至所述第一轴套远离所述第一端板的一端的端面上;和/或
所述第二端板与所述第一轴套接触的面与所述轮端固定座之间沿所述驱动轮的轴向方向设置有间隙,所述内轴承套在所述外轴承套内具有沿所述外轴承套的轴向方向运动的余量;和/或
所述内轴承套和所述外轴承套均由超钢材料制成。
6.根据权利要求5所述的驱动轮组件,其特征在于,
所述第二轴套的外壁面包括与所述第二端板连接的第一圆柱面和与所述第一圆柱面呈阶梯连接的第一锥形面,所述第一锥形面从靠近所述第二端板的方向至远离所述第二端板的方向逐渐向内收缩,所述第一轴套的内壁面包括与所述第一轴套的外壁面相适配的第二圆柱面和第二锥形面,
所述第一轴套的内壁面还包括与所述弧形过渡部的外表面密封配合的倒角面,所述倒角面与所述第二锥形面连接,
所述第二轴套的外壁面与所述第二端板的连接处设置有一圈凹槽。
7.根据权利要求1至6中任一所述的驱动轮组件,其特征在于,
所述轮体的内轮侧面上设置有一圈环形凸起。
8.根据权利要求7所述的驱动轮组件,其特征在于,
所述环形凸起上设置有第一缺口。
9.根据权利要求1至6中任一项所述的驱动轮组件,其特征在于,
所述轮体包括轮毂和轮圈,所述轮毂和所述轮圈之间通过多个轮辐条进行连接,所述轮圈外设置有轮胎,所述轮胎的轮胎面上间隔设置有多个凸条,每一所述凸条均沿所述轮体的轴向方向设置,所述轮体上还对称设置有多个长圆弧条,每一所述长圆弧条均沿着所述轮体的外表面从所述轮胎的胎面延伸到所述轮毂;和/或
所述轮体与所述轮轴为一体式结构;和/或
所述弹性轮为橡胶轮。
10.一种消防机器人,其特征在于,包括一个或多个如权利要求1至9中任一项所述的驱动轮组件。
说明书
技术领域
本实用新型涉及消防机器人领域,更具体地,涉及一种驱动轮组件及消防机器人。
背景技术
消防机器人作为特种机器人的一种,能够代替消防救援人员进入易燃易爆、有毒、缺氧、浓烟等危险灾害事故现场进行数据采集、处理、反馈,它的应用将提高消防部门消防救灾的实战能力,对减少国家财产损失和灭火救援人员的伤亡将产生重要的作用。但随着现在的科技发展,居民住宅,企业办公楼以及企业工厂的建筑规模和外观美化都使得建筑群体变得日益复杂,而这也增大了在发生火灾的时候消防救火的难度,而且消防现场里,建筑结构的高度落差以及结构形态都是比较复杂的,这种情况消防员是无法进去采集消防现场内的信息的,所以就需要一些微型的抛投机器人进入里边采集火场信息,本着这种建筑结构高度落差比较大,建筑结构比较复杂的情况,就对微型抛投机器人自身的抗冲击力性能提出了更高的要求。
实用新型内容
为解决上述背景技术中提出的技术问题,根据本实用新型的实施例,提供了一种驱动轮组件和包括该驱动轮组件的消防机器人。
本实用新型的第一方面提出了一种驱动轮组件,用于消防机器人,包括:
弹性轮,弹性轮由轮体和轮轴组成,轮轴设置在轮体的内轮侧面上,并凸出轮体的内轮侧面,轮体上设置有贯穿轮体和轮轴的轮轴孔,所述轮体与所述轮轴之间通过弧形过渡部进行过渡连接,所述轮体为一体式结构;
连接轴组件,包括连接轴、第一销轴和过渡轴套,连接轴的一端上设置有第一安装孔,连接轴的另一端插入并固定到轮轴孔内,过渡轴套的第一端侧壁上设置有第一通孔,过渡轴套的第一端间隙安装在第一安装孔内,连接轴上设置有与第一通孔同轴且大小形状相同的第二通孔,第一销轴的一端穿过第二通孔并从第一通孔伸出,以使过渡轴套的第一端和连接轴通过第一销轴进行铰接;
电机组件,包括电机,电机的一端上设置有电机轴,电机轴的一端插入到过渡轴套的第二端内,并与过渡轴套的第二端驱动连接。
根据本实用新型提出的驱动轮组件,包括弹性轮、连接轴组件和电机组件,其中,弹性轮由轮体和轮轴组成,轮体主要用于实现行走,而由于弹性轮的轮体又具有较好的弹性,因此,消防机器人在被抛投到火灾等现场时,通过轮体便能够抗住地面大部分的冲击力,有效的保护机器人内部结构件和电气元器件。而轮轴凸出设置,使得弹性轮还能够基于凸出的轮轴实现其在其他物体上的固定安装。而轮轴孔用于安装连接轴,以实现弹性轮与电机轴等的驱动连接。而连接轴组件用于实现电机轴和弹性轮之间的驱动连接,连接轴组件包括连接轴、第一销轴和过渡轴套,电机轴插入安装到过渡轴套内,而过渡轴套通过第一销轴铰接安装在连接轴的一端内,从而使得过渡轴套能够在连接轴内绕第一销轴转动,即过渡轴套能够在连接轴内上下摆动。同时,第一通孔和第二通孔与第一销轴之间是间隙配合,即第一通孔和第二通孔要大于第一销轴的尺寸,而且过渡轴套内扁圆面是比电机轴圆面宽的,电机轴是可以沿着扁平面在过渡轴套内移动的,其中,这里的过渡轴套的扁平面是用来和电机轴的扁平面配合传递扭矩力的,这样就使得过渡轴套的摆动方向和电机轴在过渡轴套内的移动方向正好构成了一个十字,相对电机轴来说就构成了一个既能够用来传递扭矩又具有柔性的十字连接轴系统,这样就使得电机和弹性轮之间能够通过具有柔性的十字连接轴系统进行连接。该种结构,弹性轮跌落到地面,弹性轮因受地面的跌落冲击影响,轮轴发生扭曲弯折时,电机轴就可以在十字柔性连接轴结构里沿着两个方向进行移动扭转,从而既保护了电机轴不会被冲击力掰断,即保护了电机轴在跌落过程中受冲击力后垂直于轴线四个方向避免折断,又在实现抗冲击下传递了扭矩力,这样便实现了抗冲击和传递扭矩力两种功能,从而使得机器人的结构更紧凑,节省了空间,进而实现了机器人的小型化和微型化。
其中,轮体与轮轴之间通过弧形过渡部进行过渡连接,能够使弹性轮的整体结构更加合理,而轮体的轮毂、轮辐和轮圈为一体式结构,能够使轮体的结构更加优化,更便于加工。轮体的轮毂、轮辐和轮圈优选一体制成。
进一步优选地,轮轴孔包括设置在轮体内的第一轴孔和设置在轮轴内的第二轴孔,电机轴和过渡轴套的第二端在第二轴孔内驱动连接。
进一步优选地,第一安装孔的内壁面由第一弧形面和第一传动平面组成,过渡轴套的外壁面包括对称设置的两个第二传动平面,两个第二传动平面之间通过第二弧形面连接,且第一传动平面的宽度小于第二传动平面的宽度,第一弧形面的宽度大于第二弧形面的宽度。
进一步优选地,过渡轴套与电机轴配合的一端内设置有传动孔,传动孔的内壁面包括对称设置的两个第三传动平面,两个第三传动平面之间通过第三弧形面连接,电机轴与过渡轴套配合的一端上对称设置有两个第四传动平面,两个第四传动平面之间通过第四弧形面连接,且第三传动平面的宽度小于第四传动平面的宽度,第三弧形面的宽度大于第四弧形面的宽度。
在上述任一方案中,优选地,电机组件还包括电机安装座,电机安装座套设安装在电机设置有电机轴的一端,所示驱动轮组件还包括:
轮端固定座,位于弹性轮设置有轮轴的一侧,安装至电机安装座,轮端固定座上设置有沿轮体的轴向方向分布的轴承安装孔;外轴承套,外轴承套包括第一端板和第一轴套,第一端板安装在轮端固定座靠近轮体的面上,第一轴套设置在第一端板上并能够转动地安装在轴承安装孔内;内轴承套,内轴承套包括第二端板和设置在第二端板一侧的第二轴套,第二轴套插入安装到第一轴套内,第二轴套与第一轴套之间为过盈配合,且第二端板固定安装至第一轴套远离第一端板的一端的端面上;其中,第二轴套上设有多个沿轴向方向设置的条形缺口,多个条形缺口沿第二轴套的周向方向等间隔设置,轮轴插入安装到第二轴套内,与第二轴套驱动连接。
进一步优选地,第二端板通过多个螺钉固定安装至第一轴套远离第一端板的一端的端面上。优选地,第二端板与第一轴套接触的面与轮端固定座之间沿驱动轮的轴向方向设置有间隙,内轴承套在外轴承套内具有沿外轴承套的轴向方向运动的余量。优选地,内轴承套和外轴承套均由超钢材料制成。
进一步优选地,第二轴套的外壁面包括与第二端板连接的第一圆柱面和与第一圆柱面呈阶梯连接的第一锥形面,第一锥形面从靠近第二端板的方向至远离第二端板的方向逐渐向内收缩,第一轴套的内壁面包括与第一轴套的外壁面相适配的第二圆柱面和第二锥形面,轮体与轮轴之间通过弧形过渡部进行过渡连接,第一轴套的内壁面还包括与弧形过渡部的外表面密封配合的倒角面,倒角面与第二锥形面连接,第二轴套的外壁面与第二端板的连接处设置有一圈凹槽。
进一步优选地,轮体的内轮侧面上设置有一圈环形凸起。
优选地,环形凸起上设置有第一缺口。
在上述任一方案中,优选地,轮体包括轮毂和轮圈,轮毂和轮圈之间通过多个轮辐条进行连接,轮圈外设置有轮胎,轮胎的轮胎面上间隔设置有多个凸条,每一凸条均沿轮体的轴向方向设置,轮体上还对称设置有多个长圆弧条,每一长圆弧条均沿着轮体的外表面从轮胎的胎面延伸到轮毂。
进一步优选地,轮体与轮轴为一体式结构。优选地,弹性轮为橡胶轮。
本实用新型的第二方面提出了一种消防机器人,包括:第一方面任一项技术方案提供的驱动轮组件。
应当理解,实用新型内容部分中所描述的内容并非旨在限定本实用新型的实施例的关键或重要特征,亦非用于限制本实用新型的范围。本实用新型的其它特征将通过以下的描述变得容易理解。
附图说明
结合附图并参考以下详细说明,本实用新型各实施例的上述和其他特征、优点及方面将变得更加明显。在附图中,相同或相似的附图标记表示相同或相似的元素,其中:
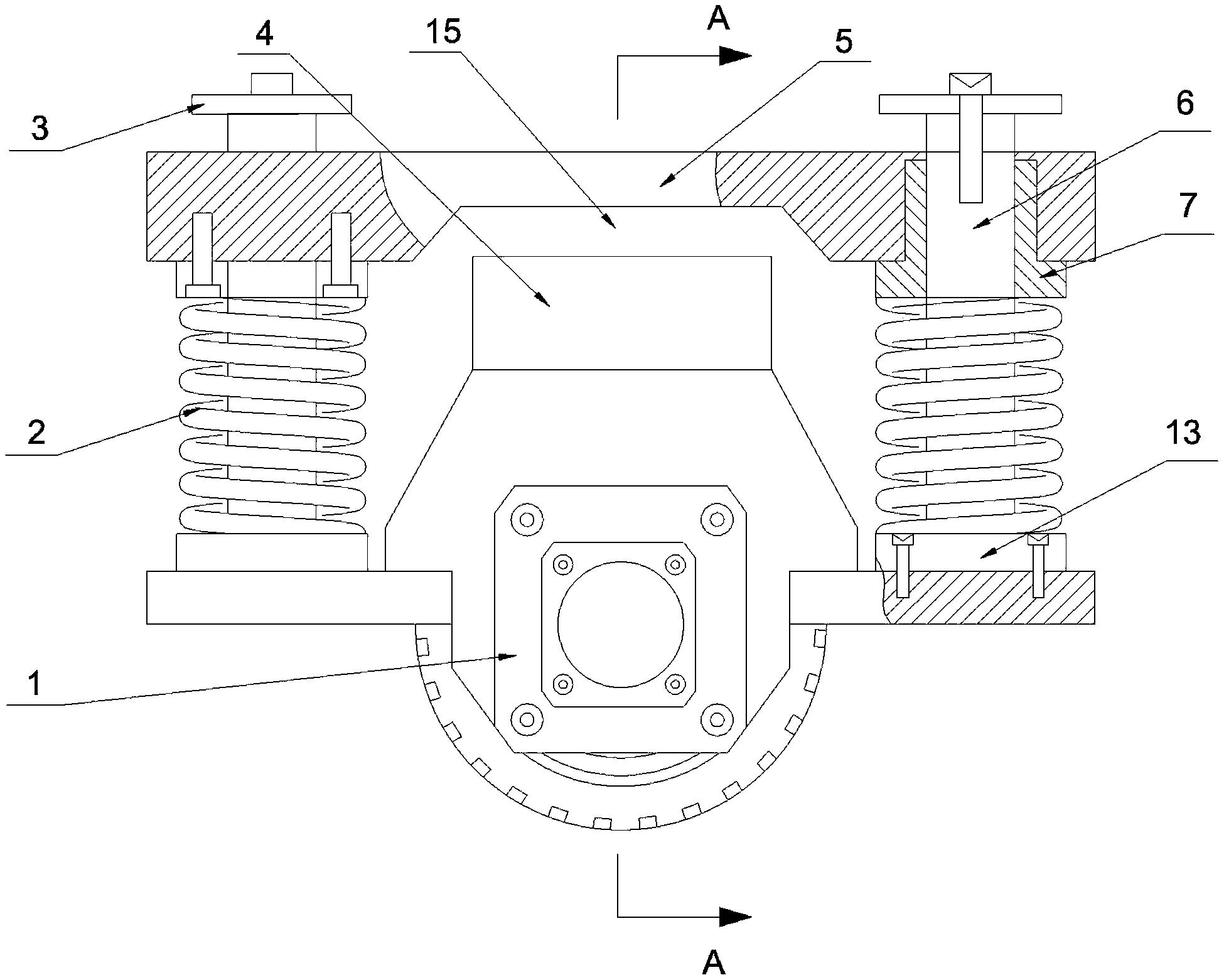
图1示出了本实用新型提供的驱动轮组件的结构示意图;
图2示出了本实用新型提供的驱动轮组件的分解结构示意图;
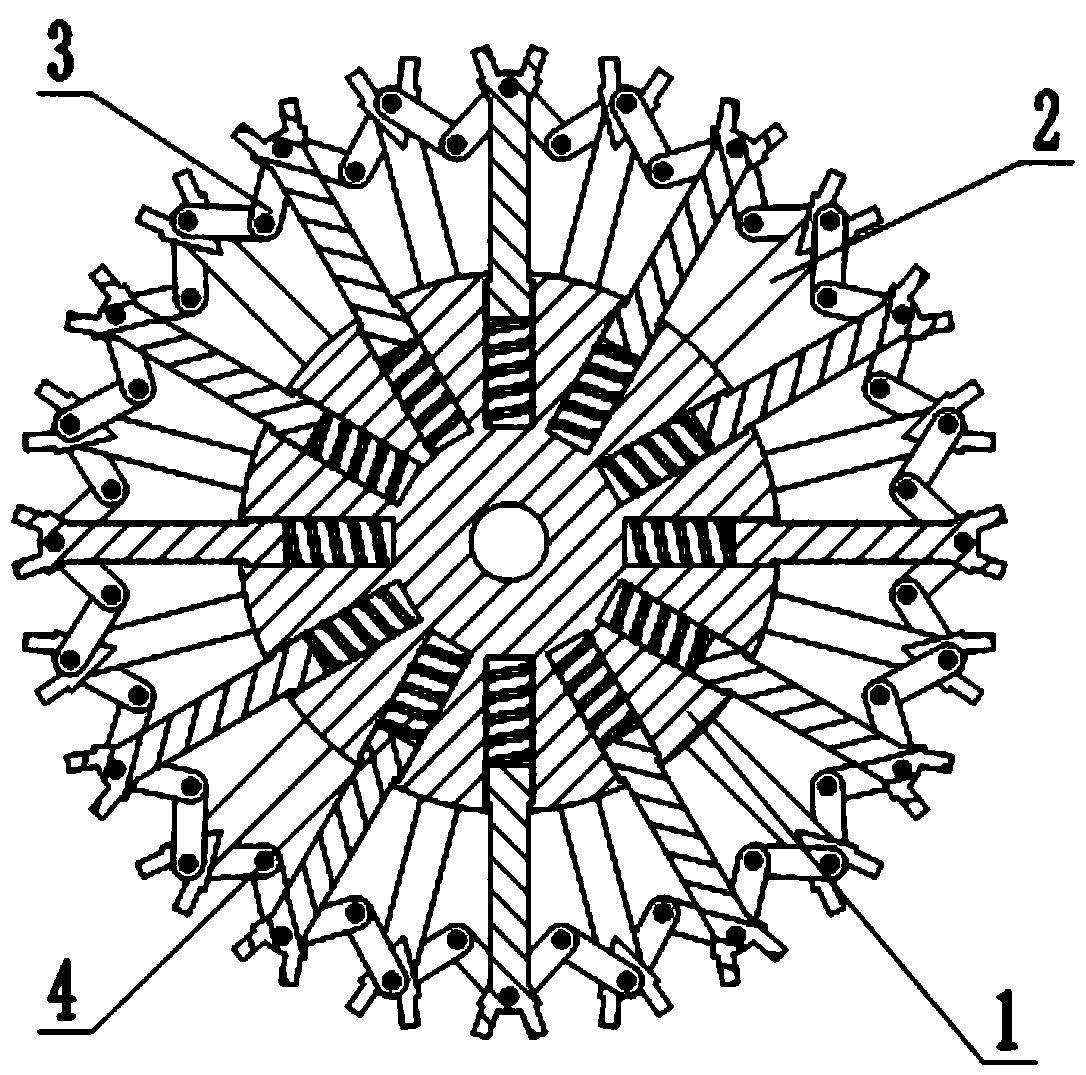
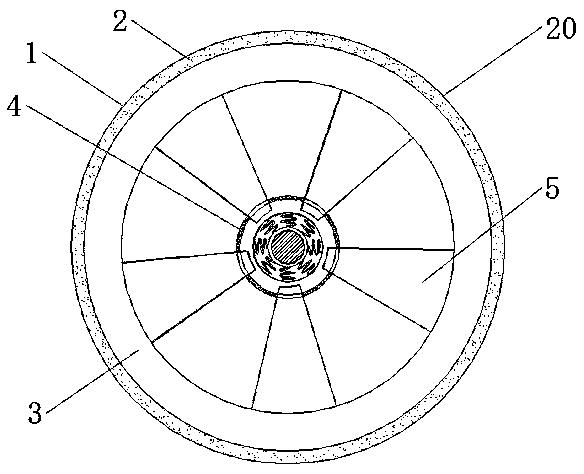
图3示出了本实用新型提供的驱动轮组件的弹性轮的结构示意图;
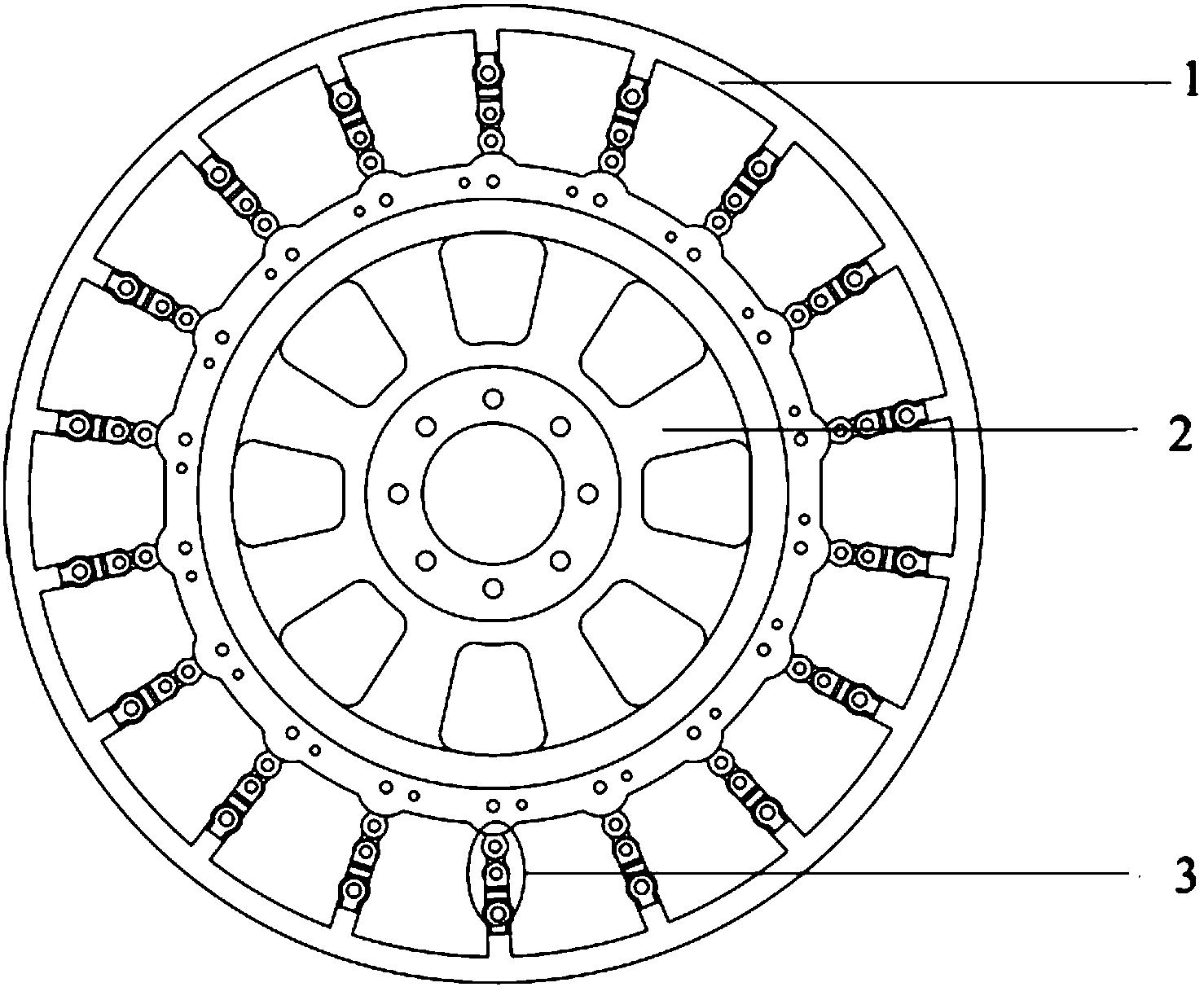
图4示出了本实用新型提供的驱动轮组件的弹性轮的另一结构示意图;
图5示出了本实用新型提供的驱动轮组件的连接轴组件的结构示意图;
图6示出了连接轴组件的分解结构示意图;
图7示出了驱动轮组件的电机组件的结构示意图;
图8示出了驱动轮组件的部分结构示意图;
图9示出了内轴承套、外轴承套和轮端固定座的组装结构示意图;
图10示出了驱动轮组件的外轴承套的结构示意图;
图11示出了驱动轮组件的外轴承套的另一结构示意图;
图12示出了驱动轮组件的内轴承套的结构示意图;
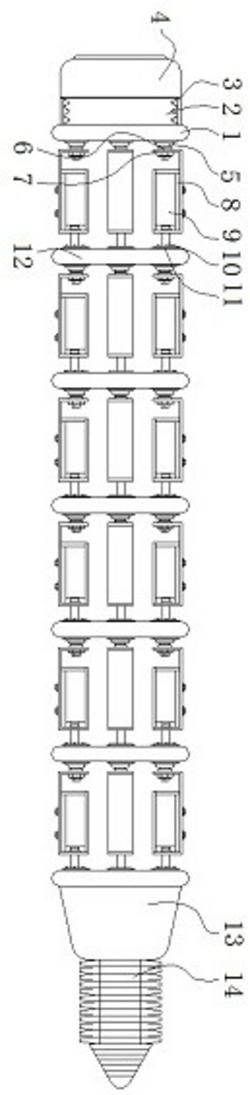
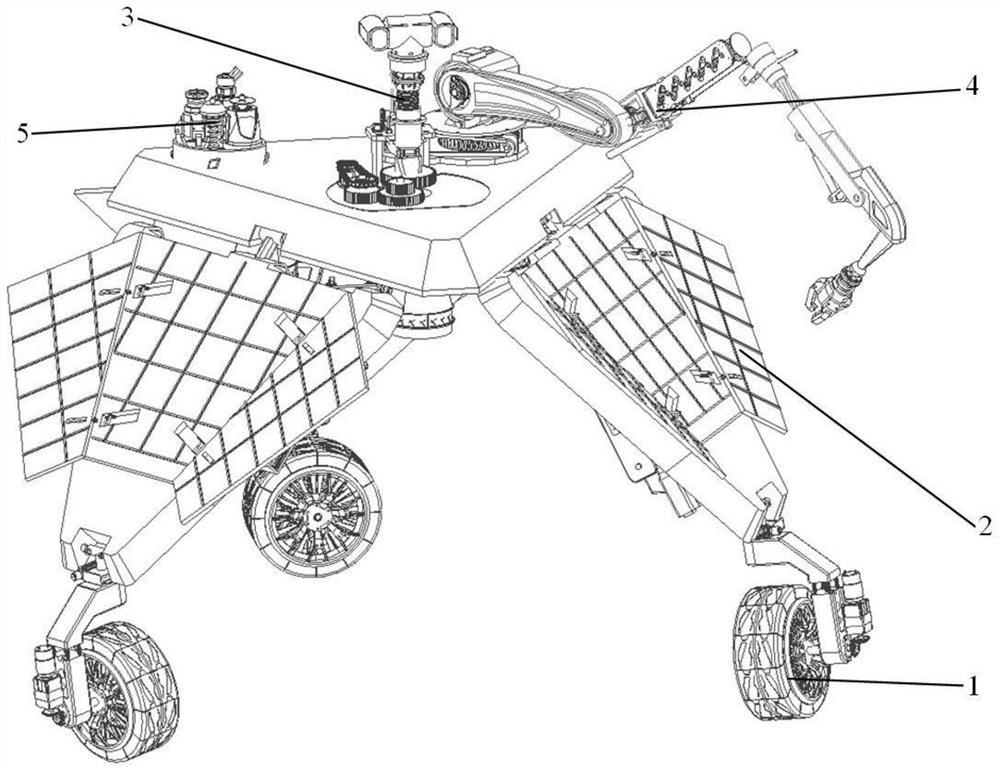
图13示出了本实用新型的实施例提供的消防机器人的结构示意图;
图14示出了本实用新型的实施例提供的消防机器人的另一结构示意图;
图15示出了消防机器人的不包括驱动组件结构示意图;
图16示出了消防机器人的面板组件的结构示意图;
图17示出了消防机器人的电控箱及其内部的结构示意图;
图18示出了消防机器人的电控箱及其内部的另一结构示意图;
图19示出了消防机器人的电控箱的箱座的结构示意图;
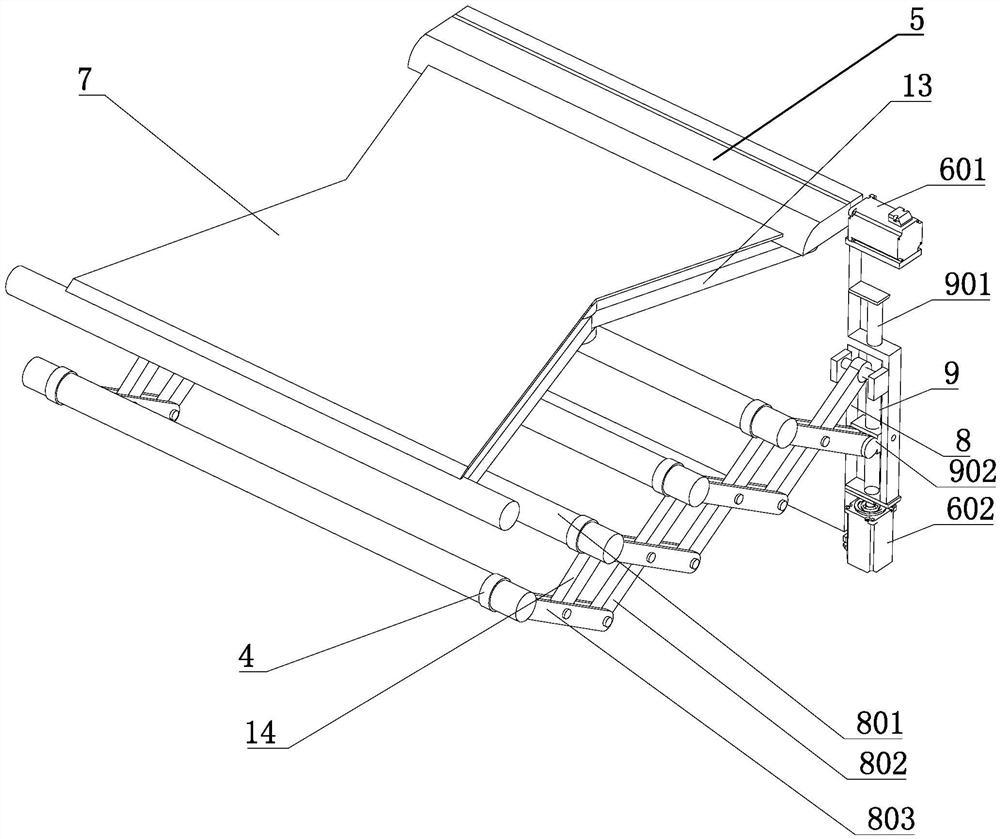
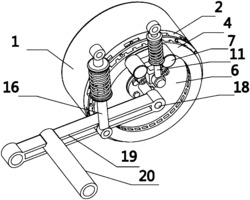
图20示出了后尾杆组件相对后面板打开的状态结构示意图;
图21示出了后尾杆组件相对后面板折叠的状态结构示意图。
其中,图1至图21中的附图标记与部件名称之间的对应关系为:
1弹性轮,10弧形过渡部,12轮体,122轮毂,124轮圈,126轮辐条, 128轮胎,14轮轴,16环形凸起,162第一缺口,18轮轴孔,182第一轴孔, 184第二轴孔,2连接轴组件,22连接轴,222第一安装孔,224第二通孔, 226第一固定孔,24过渡轴套,242第一通孔,244传动孔,26第一销轴,3 电机组件,32电机,322电机轴,34电机安装座,342第二固定孔,4轮端固定座,42轴承安装孔,44第三固定孔,5外轴承套,52第一端板,54第一轴套,540第三通孔,542第二圆柱面,544第二锥形面,546倒角面,6 内轴承套,62第二端板,622第四通孔,64第二轴套,640条形缺口,642 爪瓣,644第一圆柱面,646第一锥形面,66凹槽,7机体组件,72电控箱, 722箱座,7220安装槽,7222供电装置仓,7224音视频仓,7226主控仓, 7227骨架梁,7228隔板,7242供电装置盖,7244主控盖,7246音视频盖, 726卡槽,74电控元件,742音视频设备,744主控板,76供电装置,78面板组件,782面板,782’后面板,784密封条,8缓冲块,8’缓冲块,80沉孔, 82第二缺口,92通讯组件,922通信盒,924信号线,94后尾杆组件。
具体实施方式
为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的全部其他实施例,都属于本实用新型保护的范围。
下面参照图1至图21来描述本实用新型的实施例提供的驱动轮组件和消防机器人。
如图1和图2所示,本实用新型的第一方面提出了一种驱动轮组件,用于消防机器人,包括:弹性轮1、连接轴组件2和电机组件3,其中:
如图3和图4所示,弹性轮1由轮体12和轮轴14组成,轮轴14设置在轮体12的内轮侧面上,并凸出轮体12的内轮侧面,轮体12上设置有贯穿轮体12 和轮轴14的轮轴孔18,轮体12与轮轴14之间通过弧形过渡部10进行过渡连接,轮体12的轮毂122、轮辐126和轮圈124为一体式结构。
如图5和图6所示,连接轴组件2包括连接轴22、第一销轴26和过渡轴套 24,连接轴22的一端上设置有第一安装孔222,连接轴22的另一端插入并固定到轮轴孔18内,过渡轴套24的第一端侧壁上设置有第一通孔242,过渡轴套24的第一端间隙安装在第一安装孔222内,连接轴22上设置有与第一通孔242 同轴且大小形状相同的第二通孔224,第一销轴26的一端穿过第二通孔224并从第一通孔242伸出,以使过渡轴套24的第一端和连接轴22通过第一销轴26 进行铰接;
如图7所示,电机组件3包括电机32,电机32的一端上设置有电机轴322,电机轴322的一端插入到过渡轴套24的第二端内,并与过渡轴套24的第二端驱动连接。
根据本实用新型提出的驱动轮组件,包括弹性轮1、连接轴组件2和电机组件3,其中,弹性轮1由轮体12和轮轴14组成,轮体12主要用于实现行走,而由于弹性轮1的轮体12又具有较好的弹性,因此,消防机器人在被抛投到火灾等现场时,通过轮体12便能够抗住地面大部分的冲击力,有效的保护机器人内部结构件和电气元器件。而轮轴14凸出设置,使得弹性轮1还能够基于凸出的轮轴14实现其在其他物体上的固定安装。而轮轴孔18用于安装连接轴22,以实现弹性轮1与电机轴322等的驱动连接。而连接轴组件2用于实现电机轴 322和弹性轮1之间的驱动连接,包括连接轴22、第一销轴26和过渡轴套24,电机轴322插入安装到过渡轴套24内,而过渡轴套24通过第一销轴26铰接安装在连接轴22的一端内,从而使得过渡轴套24能够在连接轴22内绕第一销轴 26转动,即过渡轴套24能够在连接轴22内上下摆动。同时,第一通孔242和第二通孔224与第一销轴26之间是间隙配合,即第一通孔242和第二通孔224 要大于第一销轴26的尺寸,而且过渡轴套24内扁圆面是比电机轴322圆面宽的,电机轴322是可以沿着扁平面在过渡轴套24内移动的,其中,这里的过渡轴套24的扁平面是用来和电机轴322的扁平面配合传递扭矩力的,这样就使得过渡轴套24的摆动方向和电机轴322在过渡轴套24内的移动方向正好构成了一个十字,相对电机轴322来说就构成了一个既能够用来传递扭矩又具有柔性的十字连接轴系统。这样就使得电机32和弹性轮1之间能够通过具有柔性的十字连接轴系统进行连接。该种结构当弹性轮1跌落到地面,弹性轮1因受地面的跌落冲击影响,轮轴14发生扭曲弯折时,电机轴322就可以在十字柔性连接轴22结构里沿着两个方向进行移动扭转,从而既保护了电机轴322不会被冲击力掰断,即保护了电机轴322在跌落过程中受冲击力后垂直于轴线四个方向避免折断,又在实现抗冲击下传递了扭矩力,这样便实现了抗冲击和传递扭矩力两种功能,从而使得机器人的结构更紧凑,节省了空间,进而实现了机器人的小型化和微型化。
其中,轮体12与轮轴14之间通过弧形过渡部10进行过渡连接,能够使弹性轮1的整体结构更加合理,而轮体12的轮毂122、轮辐126和轮圈124 为一体式结构,能够使轮体12的结构更加优化,更便于加工。优选地,轮体 12的轮毂122、轮辐126和轮圈124一体制成。
其中,轮体12的内轮侧面为轮体12竖直放置时,与地垂直的内侧侧面。
其中,如图1和图5所示,连接轴22的另一端上,即没有安装过渡轴套24 的一端上设置有带有螺纹的第一固定孔226,同时,在轮体12的远离轮轴14的面上设置带有孔的固定板,然后可通过一螺钉穿过固定板,然后插入到第一固定孔226内,以实现固定板、轮体12和连接轴22之间的连接。优选地,可在轮体12远离轮轴14的面上设置沉槽,然后将带有孔的固定板限位安装在该沉槽内,这样可将固定板和固定连接轴22的螺钉隐藏安装在轮体12内,避免固定板或者固定连接轴22的螺钉裸露在轮体12外。
进一步优选地,如图1、图3和图4所示,轮轴孔18包括设置在轮体12内的第一轴孔182和设置在轮轴14内的第二轴孔184,电机轴322和过渡轴套24 的第二端在第二轴孔184内驱动连接。这样可防止电机轴322插入轮轴孔18过深,而电机轴322插入过深,会使得电机轴322更易受弹性轮1的冲击影响,因而不利于保护电机轴322的安全。
进一步优选地,如图6所示,第一安装孔222的内壁面由第一弧形面和第一传动平面组成,过渡轴套24的外壁面包括对称设置的两个第二传动平面,两个第二传动平面之间通过第二弧形面连接,且第一传动平面的宽度小于第二传动平面的宽度,第一弧形面的宽度大于第二弧形面的宽度,这样就使得过渡轴套24能够在连接轴22内相对连接轴22转动,从而使得过渡轴套24与连接轴22之间既能够通过第一传动平面和第二传动平面的配合进行扭矩传递,又使得过渡轴套24能够在连接轴22内进行轻微转动,从而实现过渡轴套24与连接轴 22之间的柔性连接,这样便可卸载掉大部分连接轴组件2和电机轴322之间的冲击力,实现对电机轴322的保护。优选地,可将传动孔244设置为D形槽或 D形孔。
进一步优选地,如图6所示,过渡轴套24与电机轴322配合的一端内设置有传动孔244,传动孔244的内壁面包括对称设置的两个第三传动平面,两个第三传动平面之间通过第三弧形面连接,如图7所示,电机轴322与过渡轴套24 配合的一端上对称设置有两个第四传动平面,两个第四传动平面之间通过第四弧形面连接,且第三传动平面的宽度小于第四传动平面的宽度,第三弧形面的宽度大于第四弧形面的宽度。这样就使得电机轴322能够在过渡轴套24内相对过渡轴套24轻微转动,从而使得电机轴322既能够与过渡轴套24进行驱动连接,以传递扭矩,又使得使得电机轴322能够在过渡轴套24内进行轻微的转动,从而实现电机轴322和过渡轴套24之间的柔性连接,这样便可进一步卸载掉一些过渡轴套24和电机轴322之间的冲击力,实现对电机轴322的保护。同时,过渡轴套24与电机轴322可以通过传动平面进行扭矩传递,而这种传递方式能够简化电机轴322和过渡轴套24的结构。此外,电机轴322设置成扁平状能够增大电机轴322的传动面,进而增大扭矩的传递效力。
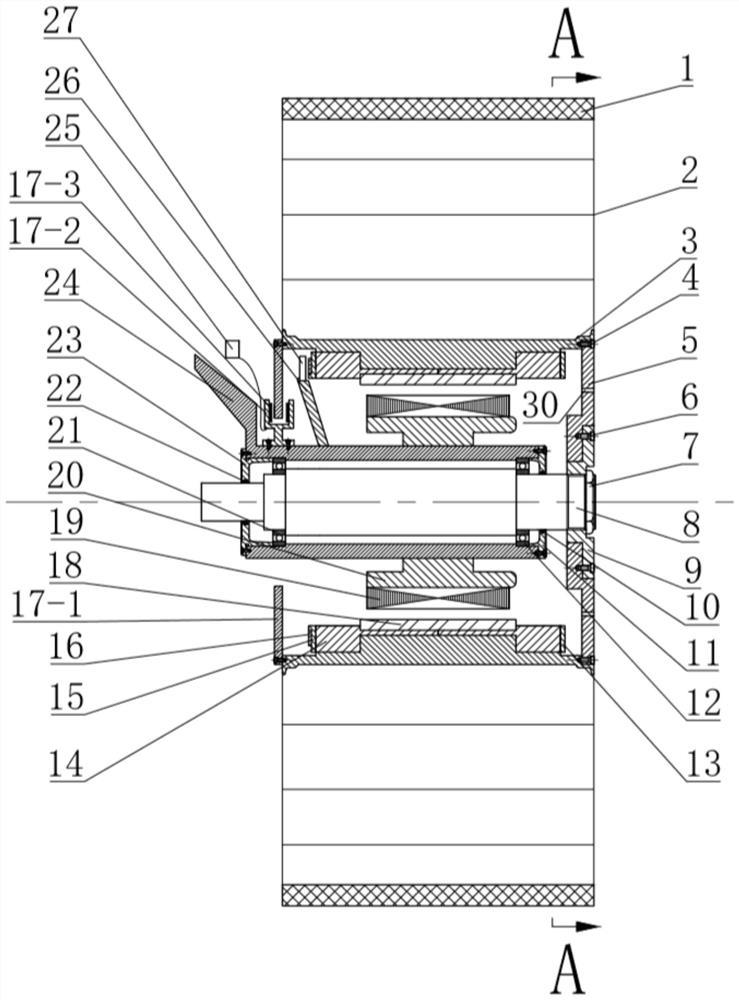
在上述任一方案中,优选地,如图1、图2和图7所示,所述电机组件还包括电机安装座34,电机安装座34套设安装在电机32设置有电机轴322的一端,其中,如图1、图2和图8所示,驱动轮组件还包括:轮端固定座4,位于弹性轮1设置有轮轴14的一侧,安装至电机安装座34,轮端固定座4上设置有沿轮体12的轴向方向分布的轴承安装孔42;外轴承套5,外轴承套5包括第一端板 52和第一轴套54,第一端板52安装在轮端固定座4靠近轮体12的面上,第一轴套54设置在第一端板52上并能够转动地安装在轴承安装孔42内;内轴承套 6,内轴承套6包括第二端板62和设置在第二端板62一侧的第二轴套64,第二轴套64插入安装到第一轴套54内,第二轴套64与第一轴套54之间为过盈配合,且第二端板62固定安装至第一轴套54远离第一端板52的一端的端面上;其中,第二轴套64上设有多个沿轴向方向设置的条形缺口640,多个条形缺口 640沿第二轴套64的周向方向等间隔设置,轮轴14插入安装到第二轴套64内,与第二轴套64驱动连接。
在该实施例中,电机安装座34用于实现电机安装,而驱动轮组件还包括轮端固定座4、内轴承套6、外轴承套5,其中,电机32上设置有电机轴322,电机32没有设置电机轴322的一端安装到机体组件7内。而电机安装座34安装在电机32设置有电机轴322的一端上,用于实现弹性轮1、轮端固定座4等与电机32之间的安装连接。轮端固定座4上设置有第三固定孔44,而电机安装座 34上设置有第二固定孔342,轮端固定座4通过第三固定孔44、第二固定孔342 和螺钉安装在电机安装座34上,轮端固定座4内安装有内轴承套6和外轴承套 5组成的类轴承组件,该类轴承组件能够在轮端固定座4的轴承安装孔内转动。而弹性轮1的轮轴14可直接通过内轴承套6和外轴承套5安装在轮端固定座4 上。而连接轴组件2主要用于实现电机轴322和弹性轮1之间的连接,从而实现扭矩传递。该种结构,在安装好后,电机轴322能够通过连接轴组件2带动弹性轮1转动,从而能够带动整个机器人行走,以实现机器人的移动。而内轴承套6和外轴承套5组成的类轴承组件能够转动地安装在轴承安装孔42内,能够在轮轴14的作用下在轴承安装孔42内转动。
具体地,如图8至图11所示,外轴承套5包括第一端板52和与内轴承套6 配合的第一轴套54,第一端板52用于卡在轮端固定座4的外侧,以实现外轴承套5的轴向限位,而第一轴套54用于与第二轴套64进行配合。如图12所示,内轴承套6包括第二端板62和设置在第二端板62一侧的第二轴套64,如图9 所示,第二轴套64过盈插入安装到第一轴套54内,而第二端板62用于与第一轴套54的端面进行固定,这样便能够实现内轴承套6与外轴承套5之间的固定。而弹性轮1的轮轴14固定安装到第二轴套64内,这样便能够将弹性轮1的轮轴14通过内轴承套6和外轴承套5构成的类轴承组件安装到轮端固定座4上。而第二轴套64由多个相互间隔设置并安装到第二端板62上的爪瓣642组成,即这里第二轴套64的整个圆周上设置有多个等宽的条形缺口640(或者说是条形槽),多个条形缺口640(或者说是条形槽)将第二轴套64分成了多个相互间隔设置的爪瓣642。同时,由于第一轴套54与第二轴套64之间为过盈配合,即第二锥形面544比第一锥形面646大,这样在第一轴套54和第二轴套64安装好后,第二轴套64的爪瓣642便会受到第一轴套54的挤压而产生弹力,而该弹力能够使第一轴套54和第二轴套64能够相互挤压紧贴配合,从而能够增加第一轴套54和第二轴套64之间的摩擦力,这样第一轴套54和第二轴套64 之间便可通过彼此之间的挤压摩擦力而实现扭矩的传递。而该设置通过内外轴承套之间的摩擦力起到了传递驱动扭矩力的作用,节省了不必要的结构,提高了产品可靠性,节省了空间。在安装时,可先将内轴承套6隔着轮端固定座4插入到外轴承套5的内圆孔里边,而将弹性轮1的轮轴14插入内轴承套6的内孔里,然后用螺钉将内轴承套6、弹性轮1和连接轴22固定连接在一起,以使内外轴承套的圆锥端面相互紧贴合,挤压在一起。该种结构在安装好后,由于内轴承套6的爪瓣642受到外轴承套5的约束挤压,会向内变形,这样内轴承套6的爪瓣642便会对驱动轮的轮轴14形成爪力,同时由于驱动轮的轮轴14 的轮轴孔18内有连接轴22作为支撑,这样通过连接轴22的支撑和外轴承套5的挤压,便能够使内轴承套6牢牢地抱住轮轴14,从而实现轮轴14与内轴承套 6之间的扭矩传递。
同时该种结构,在弹性轮1跌落受到地面的冲击时,弹性轮1变形扭转,然后把这一个变形扭转传递给外轴承套5,外轴承套5随着弹性轮1的轮轴14 做弯折运动,这时内轴承套6的爪瓣642由于受到外轴承套5内圆面的约束挤压,因而内外轴承套相互接触的面之间就会相互产生一定的弹力,这样外轴承套5传递给内轴承套6的冲击力就会被这些弹力所抵消掉一部分,即该种设置,通过内轴承套6和外轴承套5的特殊结构配合使得内外轴承套自身之间产生了弹力,从而卸载掉了相互之间的部分冲击力和扭转力,从而一方面可保护内轴承套6和外轴承套5自身不受损坏,同时基于内轴承套6和外轴承套5卸载掉的部分冲击力,还能够减少弹性轮1传递到连接轴22的力矩,这样通过内轴承套6和外轴承套5的配合不仅起到了传递驱动扭矩力的作用,还保护了连接轴 22和电机32。同时,弹性轮1的轮轴孔18是用来插连接轴22的,而当机器人跌落受到冲击时,弹性轮1是柔性带弹性的,因而能够以插入连接轴22为中心做360°的扭曲旋转,因而可进一步避免连接轴22的扭曲折断。此外,上述设置,通过采用高强度韧性好自润滑性好的材料,做成类轴承的结构,从本身解决了轴承不抗冲击的问题,同时,由于连接轴22和内轴承套6之间有一层轮轴 14作为垫层,这样在冲击振动时就可以保护连接轴22和内轴承套6免受磕碰损伤,从而进一步保护连接轴22和轴承部分的结构件。
进一步优选地,如图12所示,第二端板62上设置有第四通孔622,如图 10和图11所示,第一轴套54上设置有第三通孔540,第二端板62通过多个螺钉与第三通孔540和第四通孔622的配合固定安装至第一轴套54远离第一端板 52的一端的端面上,即第二端板62通过多个螺钉固定至第一轴套54的端面。
进一步优选地,如图7所示,第二端板62与第一轴套54接触的面与轮端固定座4之间沿弹性轮1的轴向方向设置有间隙,即内外轴承套和轮端固定座4 相邻的面之间设置有适量的间隙d,内轴承套6在外轴承套5内具有沿外轴承套 5的轴向方向运动的余量。该种设置使得机器人在受到跌落冲击时,内轴承套6 能够相对外轴承套5沿轴向方向轻微移动,并沿周向方向轻微转动,这样便可卸载掉一些外轴承套5和内轴承套6之间的冲击力,以对电机32和连接轴22 形成保护。
优选地,内轴承套6和外轴承套5均由超钢材料制成,即内外轴承套都优选采用强度高韧性好自润滑性好的超钢材料制成,这样方便内轴承套6和外轴承套5相对滑动顺畅摩擦力小,而且耐磨,提高自身耐疲劳性。其中,超钢材料是peek材料的别名,是一种具有耐高温、自润滑、易加工和高机械强度等优异性能的特种工程塑料,可制造加工成各种机械零部件,如汽车齿轮、油筛、换挡启动盘;飞机发动机零部件、自动洗衣机转轮、医疗器械零部件等。
进一步优选地,如图12所示,第二轴套64的外壁面包括与第二端板62连接的第一圆柱面644和与第一圆柱面644呈阶梯连接的第一锥形面646,第一锥形面646从靠近第二端板62的方向至远离第二端板62的方向逐渐向内收缩,如10和图11示,第一轴套54的内壁面包括与第一圆柱面644相适配的第二圆柱面542和与第一锥形面646适配的第二锥形面544。
在该实施例中,第一轴套54的内孔包括两个阶梯面,第一个阶梯面是和外圆端面同心的第二圆柱面542,第二个端面是呈一定角度的第二锥形面544,第二轴套64的外壁面呈多阶梯设置,具体地,第二轴套64的外壁面包括与第一轴套54的第二锥形面544配合的第一锥形面646和与第二圆柱面542配合的第一圆柱面644。这样第二轴套64和第一轴套54便能够通过两个圆柱面和两个圆锥面进行配合。而这种结构能够使第二轴套64和第一轴套54之间相互滑动配合的更紧密。同时,由于第二轴套64和第一轴套54之间还通过两者的内外圆锥面相互配合,形态就像万向连接轴22那样,可以做360°的扭曲旋转,这样便可进一步卸掉一些外轴承套5传递过来的扭转力。
进一步优选地,如图1和图3所示,轮体12与轮轴14之间通过弧形过渡部10进行过渡连接,如图9和图11所示,第一轴套54的内壁面包括与弧形过渡部10的外表面密封配合的倒角面546,倒角面546与第二锥形面544连接。而第一轴套54的倒角面546用于和弧形过渡部10紧密配合,以起到密封防水的效果。
进一步优选地,如图12所示,第二轴套64的外壁面与第二端板62的连接处设置有一圈凹槽66。这就使得内轴承套6的外壁面除了包括与外轴承套5的第一锥形面646配合的第二锥形面544和与自身同心的圆端面之外,还包括一个因凹槽66而形成的内凹圆弧面,而凹槽66能够防止内轴承套6受挤压冲击时内轴承套6的四个爪瓣642受挤压从爪根部断裂。
进一步优选地,如图3和图8所示,轮体12的内轮侧面上设置有一圈环形凸起16。
在该实施例中,弹性轮1靠近机体组件7的一端上设置有一圈凸出轮体12 的内轮侧面的环形凸起16,该环形凸起16能够与轮体12的内轮侧面围成一个凹坑,这样在安装弹性轮1时,便能够通过环形凸起16将弹性轮1套设安装在消防机器人的机体组件7上,这样便能够通过弹性轮1对机体组件7的两端形成包裹安装,从而一方面可防止机器在跌落时,机体组件7直接着地,这样便可通过弹性轮1实现冲击力的缓冲,避免机体组件7的两端受冲击磕碰损坏。另一方面环形凸起16的设置还能够使驱动轮组件与机体组件7安装的更紧凑,因而可减小机器人的体积,实现机器人的小型化。
优选地,如图3所示,环形凸起16上设置有第一缺口162。该种设置,在将弹性轮1应用在具有能够折叠和打开的后尾杆组件94的消防机器人上时,可将后尾杆组件94从第一缺口162处插入到环形凸起16的内部,这样便可通过环形凸起16实现后尾杆组件94在折叠位置的固定。同时,该种设置在弹性轮1 转动,并使后尾杆组件94转动至第一缺口162时,能够自动解除弹性轮1对后尾杆组件94的限定,这样后尾杆组件94便能够在复位件或者其他结构的作用下自动与弹性轮1脱离配合,从而能够实现后尾杆组件94的自动智能打开。
优选地,如图3和图4所示,轮体12包括轮毂122和轮圈124,轮毂122 和轮圈124之间通过多个轮辐条126进行连接,轮圈124外设置有轮胎128。其中,轮胎128的轮胎128面上间隔设置有多个凸条,每一凸条均沿轮体12的轴向方向设置,轮体12上还对称设置有多个长圆弧条,长圆弧条沿轮体12的表面从轮胎128的胎面延伸到轮毂122。该种结构利用类似于鸡蛋壳结构原理,当长圆弧条受到冲击力时,冲击力会在大弧面上被有效的分散开,在加上弹性轮1 有很好的弹性,便可以有效的把冲击力消化分解掉。
进一步优选地,如图3和图4所示,轮体12与轮轴14为一体式结构。
进一步优选地,弹性轮1为橡胶轮。这样便使得弹性轮1可以抗住地面大部分的冲击力,有效的保护机器人内部结构件和电气元器件。
如图13至图21所示,本实用新型的第二方面提出了一种消防机器人,包括:第一方面任一项实施例提供的驱动轮组件。
根据本实用新型的第二方面提出的消防机器人,由于其包括第一方面任一项实施例提供的驱动轮组件,因此,其具有第一方面任一项实施例提供的驱动轮组件的有益效果,在此不再赘述。
进一步地,如图13至图15所示,消防机器人还包括机体组件7,机体组件 7的左右两端上均设置有至少一个安装槽7220,且在沿弹性轮1的整个周向方向上,机体组件7均位于弹性轮1的内侧所对应的空间内;多个缓冲块8,如图 15所示,对称安装在机体组件7的左右两端,并位于机体组件7的左右两端沿周向方向设置的多个外表面上,且位于机体组件7的同一端的多个缓冲块8相互间隔设置;其中,如图13和图14所示,多个驱动组件对称地安装在机体组件7的左右两侧,并通过电机组件3固定到机体组件7左右两端的安装槽7220处,且轮子组件的环形凸起16套设安装在位于机体组件7的同一端的多个缓冲块8外,并与位于机体组件7的同一端的多个缓冲块8之间设置有间隙。
在该实施例中,消防机器人包括机体组件7、多个缓冲块8和多个驱动轮组件,机体组件7主要由主控板744、供电装置76和音视频设备742等元件组成,其主要用于实现消防机器人在现场的信息采集等工作。而机体组件7的左右两端的边缘处各安装有一圈缓冲块8,左右两端的缓冲块8绕机体组件7的整体周向相互间隔并呈环形设置。同时,弹性轮1靠近机体组件7的一端上设置有一圈凸出轮体12的内轮侧面的环形凸起16,该环形凸起16能够与轮体12的内轮侧面围成一个凹坑,这样在安装弹性轮1时,便能够通过环形凸起16将弹性轮1靠近机体组件7的一端套设安装在机体组件7的左右两端的缓冲块8上,即该实施例中,环形凸起16用于在弹性轮1上形成容纳和固定缓冲块8的凹坑,同时用于包裹保护机体组件7的两端,避免机体组件7的两端受冲击磕碰损坏。该种结构,由于在沿弹性轮1的整个周向方向上,即弹性轮1的所有径向方向上,机体组件7位于弹性轮1的内侧所对应的空间内,因此,该机器人在被抛投到火灾等现场时,始终能够确保弹性轮1先着地,而由于弹性轮1又具有较好的弹性,因此,消防机器人在被抛投到火灾等现场时,能够通过弹性轮1抗住地面大部分的冲击力,有效的保护机器人内部结构件和电气元器件。进一步地,缓冲块8的设置使得弹性轮1上的冲击力需要通过缓冲块8才能够传递到机体组件7,从而能够通过缓冲块8形成进一步缓冲,这样便能够基于多个缓冲块8实现对机体组件7内的零部件的第二重抗冲击保护,从而进一步降低机器人在跌落过程中对机体组件7的冲击力。
在本申请中,弹性轮1的内侧是指以弹性轮1的中心为中心,弹性轮1的最大半径为半径的圆围成的区域,即弹性轮1的内外侧是以弹性轮1与地接触的外侧壁面(即轮胎面)为界,位于圆心的一侧为内侧,而远离圆心的一侧为外侧。而弹性轮1的内侧所对应的空间,指的是以弹性轮1的整个内侧区域为截面并沿弹性轮1的轴向方向延伸的区域,这里弹性轮1的内侧所对应的空间主要指的是位于两个弹性轮1之间的且沿弹性轮1的径向方向没有超过弹性轮1 的外侧壁面的区域,也即主要指的是沿弹性轮1的轴向方向均投影在弹性轮1的外轮廓线内的区域。
进一步优选地,如图13至图15所示,消防机器人还包括:通讯组件92,通讯组件92包括安装在机体组件7的上端面上的通信盒922和安装在机体组件 7的上端面上的信号线924,信号线924位于通信盒922的外部,且信号线924 具有弹性,能够在外力作用下弯曲,并能够自动复位,且在沿弹性轮1的整个周向方向上,通信盒922位于弹性轮1的内侧所对应的空间内。
在该实施例中,通讯组件92主要用于将电控元件74采集的信息回传到控制终端,而通讯组件92主要通过信号线924进行收发信号。而信号线924具有弹性,使得信号线924在消防机器人落地时能够发生弯曲,从而避免被折断,而信号线924在消防机器人行走后能够自动复位,使得信号线924在消防机器人能够正常行走后,可进行信号的正常收发,以实现消防机器人与外界的通信。
进一步优选地,如图20和图21所示,如图13、图15、图20和图21所示,消防机器人还包括:后尾杆组件94,安装在机体组件7的后侧面,具体而言,如图13所示,后尾杆组件94安装在后面板782’上,具有内收于弹性轮1的内侧所对应的空间内的折叠状态(如图21所示)和从机体组件7的后侧面向后方延伸的打开状态(如图20所示),后尾杆组件94能够在折叠状态与打开状态之间转动。
在该实施例中,消防机器人上设置能够在折叠状态和打开状态之间任意转动的后尾杆组件94,进一步地设置能够从折叠状态自动打开到打开状态的后尾杆组件94,比如,可将后尾杆组件94由弹性轮1固定在折叠状态,并使后尾杆组件94在弹性轮1行走后能够自动打开或者通过程序控制,使后尾杆组件94 在消防机器人被抛投预设分钟后,能够自动打开,这样在机器人被抛投到现场后,可通过自动打开的后尾杆组件94确保消防机器人的平衡。同时,后尾杆组件94的折叠和打开主要通过后尾杆组件94的尾端沿着弹性轮1的轴向方向的转动来实现,这样在后尾杆组件94转动至与机体组件7的后端面平行,即后尾杆组件94转动至折叠状态时,便能够将后尾杆组件94收纳安装在弹性轮1的内侧区域,这样在需要抛投或运输机器人或运输时,便能够将后尾杆组件94保护在弹性轮1内侧,避免后尾杆组件94与地面等发生碰撞,从而能够确保后尾杆组件94的安全。
进一步优选地,如图13所示,弹性轮1的环形凸起16上设置有第一缺口 162,折叠后尾杆组件94时,后尾杆组件94能够由第一缺口162进入并固定到环形凸起16与缓冲块8之间的间隙内,且后尾杆组件94能够在弹性轮1转动过程中,由第一缺口162从折叠状态自动转动到打开状态。
在该实施例中,在后尾杆组件94处于折叠状态时可将弹性轮1的第一缺口 162对准后尾杆组件94,然后转动弹性轮1,使后尾杆组件94的一端固定到弹性轮1的环形凸起16与缓冲块8之间。同时,可合理设置后尾杆组件94的结构,以使后尾杆组件94在对准弹性轮1的第一缺口162时能够自动从第一缺口 162处弹出来,比如,可将后尾杆组件94设置成包括后尾杆和复位件的结构,而复位件可具体为弹簧等结构,以使后尾杆组件94在对准环形凸起16上的第一缺口162时,能够在弹簧等复位件的作用下自动复位。进一步优选地,复位件为扭簧。当然,在其他方案中,后尾杆组件94也可为电动结构,此时,可通过电动控制来实现后尾杆组件94的复位回弹。同时,第一缺口162还用来安装固定缓冲块8,方便穿螺钉和使用其他工具。
进一步优选地,如图15所示,对应后尾杆组件94的折叠状态设置的缓冲块8’上设置有第二缺口82,第二缺口82能够在后尾杆组件94固定到环形凸起16与缓冲块8之间的间隙内时避让开后尾杆组件94。该种设置使得后尾杆组件94处于折叠状态时,能够通过缓冲块8’上的第二缺口82而更接近后面板 782’设置,这样便能够将后尾杆组件94隐藏安装在弹性轮1的更内侧,防止后尾杆被缓冲块8阻挡在外。
优选地,如图15所示,多个缓冲块8均通过螺栓或螺钉安装在面板组件78 上。具体地,如图3所示,每个缓冲块8上设置有两个沉孔80,螺钉可通过该沉孔80而与面板组件78连接。
进一步优选地,如图14至图18所示,机体组件7包括:电控箱72,如图 17额和图18所示,电控箱72的左右两端上均设置有至少一个安装槽7220;多个电控元件74,设置在电控箱72内;供电装置76,设置在电控箱72内;面板组件78,如图15和图16所示,包括多个面板782和密封条784,多个面板782 一一对应且能够拆卸地安装在电控箱72沿周向方向设置的多个外表面上,且任意相邻两个面板782之间均安装有一密封条784;其中,如图14所示,面板组件78的左右两端均从电控箱72左右两端伸出预设长度,多个缓冲块8对称地安装在面板组件78的左右两端。
在上述方案的基础上,优选地,如图17至图19所示,电控箱72包括:箱座722,箱座722包括多个骨架梁7227和多个隔板7228,箱座722被多个隔板 7228分隔成多个相互分隔开且一端开口的仓体;多个盖板,一一对应安装在多个仓体的开口处;多个仓体包括音视频仓7224、主控仓7226和用于安装供电装置76的供电装置76仓7222,多个电控元件74包括安装在音视频仓7224内的音视频设备742和安装在主控仓7226内的主控板744。
在该实施例中,电控箱72包括电控箱72和安装在电控箱72内的电控元件 74和供电装置76,进一步地,电控箱72包括箱座722和多个盖板,箱座722 上设置有多个相互分隔开的多个仓体,盖板对应盖装在多个仓体处,并与对应的多个仓体形成容纳电控元件74或供电装置76的安装腔。电控板等电控元件 74和供电装置76等零件可依次安装在电控箱72内的不同仓体内。而如图17和图18所示,电控元件74的主要零件包括音视频设备742和主控板744等。在安装时,可打开盖板,把需要放入的主控板744、音视频设备742或供电装置76等放入到对应的多个仓体内,然后盖装好盖板即可。进一步地,箱座722由多个骨架梁7227和多个隔板7228构成,该种结构多个骨架梁7227为整个箱座722的骨架,而隔板7228主要用于形成多个独立的仓体。而多个仓体之间的相邻边都是一个比较粗的骨架梁7227,就像笼子的骨架一样,支撑了整个结构的强度,而且各个仓体都是相对比较封闭的,就起到了一定的隔绝电磁干扰的效果,同时该种结构能够把电控箱72内部大部分的核心电子器件都集成到一块,形成了一个模块,充分利用了空间,有效压缩了机器人内部,从而使机器人更小型化,节省了材料,减少了加工工时成本。此外,将箱座722设置成类似笼子一样的结构提高了中间核心结构的抗冲击性,保护了核心的电子器件免受冲击影响。而且箱座722内的各个电子器件都分仓放置,起到一定的隔绝电磁干扰作用。
进一步优选地,如图17至图19所示,多个盖板包括供电装置盖7242,主控盖7244和音视频盖7246,箱座722的底部设有下端开口的供电装置仓7222,供电装置盖7242盖装在供电装置仓7222下端的开口处,箱座722的前侧或后侧设置有开口的主控仓7226,主控盖7244盖装在主控仓7226的开口处,主控仓7226的左右两端均开口,主控板744安装在主控仓7226内,且主控板744 的左右两端均从主控仓7226的左右两端伸出,箱座722的顶部设置有上端开口的音视频仓7224,音视频盖7246盖装在音视频仓7224的开口处,安装槽7220 设置在电控箱72的左右两端,安装槽7220为与电机安装端相适配的盲孔。
进一步优选地,电控箱72沿周向方向设置的任意相邻两个外表面的连接处均设置有卡槽726,密封条784固定安装在卡槽726处,密封条784的形状与卡槽726的形状相适配。卡槽726用于对密封条784进行初步定位安装,以便能够在安装密封条784和弹性面板22之初快速确定好密封条784的位置,并在安装过程中对密封条784进行限位,防止密封条784滑落,提高面板组件78的安装便利性。
优选地,骨架梁7227和隔板7228采用强度高重量轻的镁铝合金材料加工而成,多个仓体之间的壁厚大约0.6mm-1.6mm厚,优选地为0.8mm-1mm左右。
在本说明书的描述中,术语“连接”、“安装”、“固定”等均应做广义理解,例如,“连接”可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连。
在本说明书的描述中,术语“一个实施例”、“一些实施例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或特点包含于本申请的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或实例。而且,描述的具体特征、结构、材料或特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
以上仅为本申请的优选实施例而已,并不用于限制本申请,对于本领域的技术人员来说,本申请可以有各种更改和变化。凡在本申请的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本申请的保护范围之内。
一种驱动轮组件及消防机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0