





专利摘要
本实用新型公开了一种无转向系可全向移动的电动运载平台,包括:承载平台;多个行进轮,其分别对称设置在所述承载平台的两侧,所述行进轮内安装有轮毂电机;多个行进轮轴,其与所述多个行进轮一一对应设置;其中,所述行进轮轴的一端与所述轮毂电机的定子固定连接,另一端与所述承载平台连接;多个轮胎,其一一对应安装在所述行进轮上;所述轮胎的胎面上平行间隔排布有多条带状凸起,所述带状凸起的母线方向与所述轮胎的滚动方向之间具有夹角;其中,位于所述承载平台两侧对称位置上的两个轮胎胎面的带状凸起的排布方向对称,位于承载平台对角线方向上的两个轮胎胎面的带状凸起的排布方向相同。
权利要求
1.一种无转向系可全向移动的电动运载平台,其特征在于,包括:
承载平台;
多个行进轮,其分别对称设置在所述承载平台的两侧,所述行进轮内安装有轮毂电机;
多个行进轮轴,其与所述多个行进轮一一对应设置;
其中,所述行进轮轴的一端与所述轮毂电机的定子固定连接,另一端与所述承载平台连接;
多个轮胎,其一一对应安装在所述行进轮上;所述轮胎的胎面上平行间隔排布有多条带状凸起,所述带状凸起的母线方向与所述轮胎的滚动方向之间具有夹角;
其中,位于所述承载平台两侧对称位置上的两个轮胎胎面的带状凸起的排布方向对称,位于承载平台对角线方向上的两个轮胎胎面的带状凸起的排布方向相同。
2.根据权利要求1所述的无转向系可全向移动的电动运载平台,其特征在于,所述承载平台下侧具有连接部;所述行进轮轴的一端与所述连接部铰接。
3.根据权利要求2所述的无转向系可全向移动的电动运载平台,其特征在于,还包括:
弹性支撑件,其设置在所述行进轮轴与所述承载平台的下表面之间。
4.根据权利要求2或3所述的无转向系可全向移动的电动运载平台,其特征在于,所述连接部与所述行进轮轴之间安装有衬套。
5.根据权利要求4所述的无转向系可全向移动的电动运载平台,其特征在于,所述带状凸起的母线方向与所述轮胎的滚动方向之间的夹角为45度。
说明书
技术领域
本实用新型属于运载工具技术领域,特别涉及一种无转向系可全向移动的电动运载平台。
背景技术
随着经济的高速发展,在国民经济建设中运载设备起到了举足轻重的作用,有效的保证了物资搬运的速度,从而大大提升生产效率,促进了工业的发展。运载设备无论在大型的港口、码头、工厂或是小型车间都是货物搬运必备的运输工具,目前常规的运载设备还是采用普通的运输车辆或者内燃机驱动的移动平台,这一方面造成了空气污染,有害于工作人员的健康,尤其在密闭的厂房内,另一方面由于其采用的硬件架构仍然是基于传统车辆平台,这使得某些车间内或行驶区域不宽阔的工况下进行物品转运极为困难,对驾驶员或操控者的技术要求很高。
受限于工厂等实际工作环境,一般运输的区域较为狭小,这要求了承载平台应具有很强的灵活性,常见的叉车通过采用紧凑的结构并利用后轮转向从而提高了灵活性,但其掉头行驶或转向行驶仍需要一定的空旷区域,更无法做到原地转向或斜向、横向等特殊行驶。而叉车的类似结构又不易于在其他平台上使用,因为采用机械机构的后轮转向意味着需要在底盘上加装贯穿整个底盘的连杆机械臂,同时采用这种传统的转向系统仍然无法完全解决在狭小空间内灵活行驶的问题。而通过采用新型线控转向技术,的确能够有效解决上述问题,避免转向系统的复杂机械结构,同时通过对行进轮悬架的合理设计能够使承载平台实现原地转向、斜向或横向行驶,较大程度上提升灵活性。但线控转向技术的安全性目前还得不到完全的保证,其次采用线控转向技术以及特殊的悬架,使得移动平台的成本大幅提升,对于货物运输的经济价值大打折扣,并不是一个最优的解决方案。
实用新型内容
本实用新型的目的之一是提供一种无转向系可全向移动的电动运载平台,其相对于现有的移动运载平台减少了转向系统的复杂机械结构,独立驱动的轮毂电机和轮胎带状凸起的配合能够实现原地转向、横向及斜向行驶状态,克服了现有运载移动平台灵活性差,难以在狭小空间内灵活性行驶的问题。
本实用新型提供的技术方案为:
一种无转向系可全向移动的电动运载平台,包括:
承载平台;
多个行进轮,其分别对称设置在所述承载平台的两侧,所述行进轮内安装有轮毂电机;
多个行进轮轴,其与所述多个行进轮一一对应设置;
其中,所述行进轮轴的一端与所述轮毂电机的定子固定连接,另一端与所述承载平台连接;
多个轮胎,其一一对应安装在所述行进轮上;所述轮胎的胎面上平行间隔排布有多条带状凸起,所述带状凸起的母线方向与所述轮胎的滚动方向之间具有夹角;
其中,位于所述承载平台两侧对称位置上的两个轮胎胎面的带状凸起的排布方向对称,位于承载平台对角线方向上的两个轮胎胎面的带状凸起的排布方向相同。
优选的是,所述承载平台下侧具有连接部;所述行进轮轴的一端与所述连接部铰接。
优选的是,所述的无转向系可全向移动的电动运载平台,还包括:
弹性支撑件,其设置在所述行进轮轴与所述承载平台的下表面之间。
优选的是,所述连接部与所述行进轮轴之间安装有衬套。
优选的是,所述带状凸起的母线方向与所述轮胎的滚动方向之间的夹角为45度。
本实用新型的有益效果是:
本实用新型提供的无转向系可全向移动的电动运载平台,其相对于现有的移动运载平台减少了转向系统的复杂机械结构,并且通过独立驱动的轮毂电机和轮胎带状凸起的配合能够实现原地转向、横向及斜向行驶状态,克服了现有运载移动平台机械结构复杂,灵活性差,转弯半径大,难以在狭小空间内灵活性行驶的问题。
附图说明
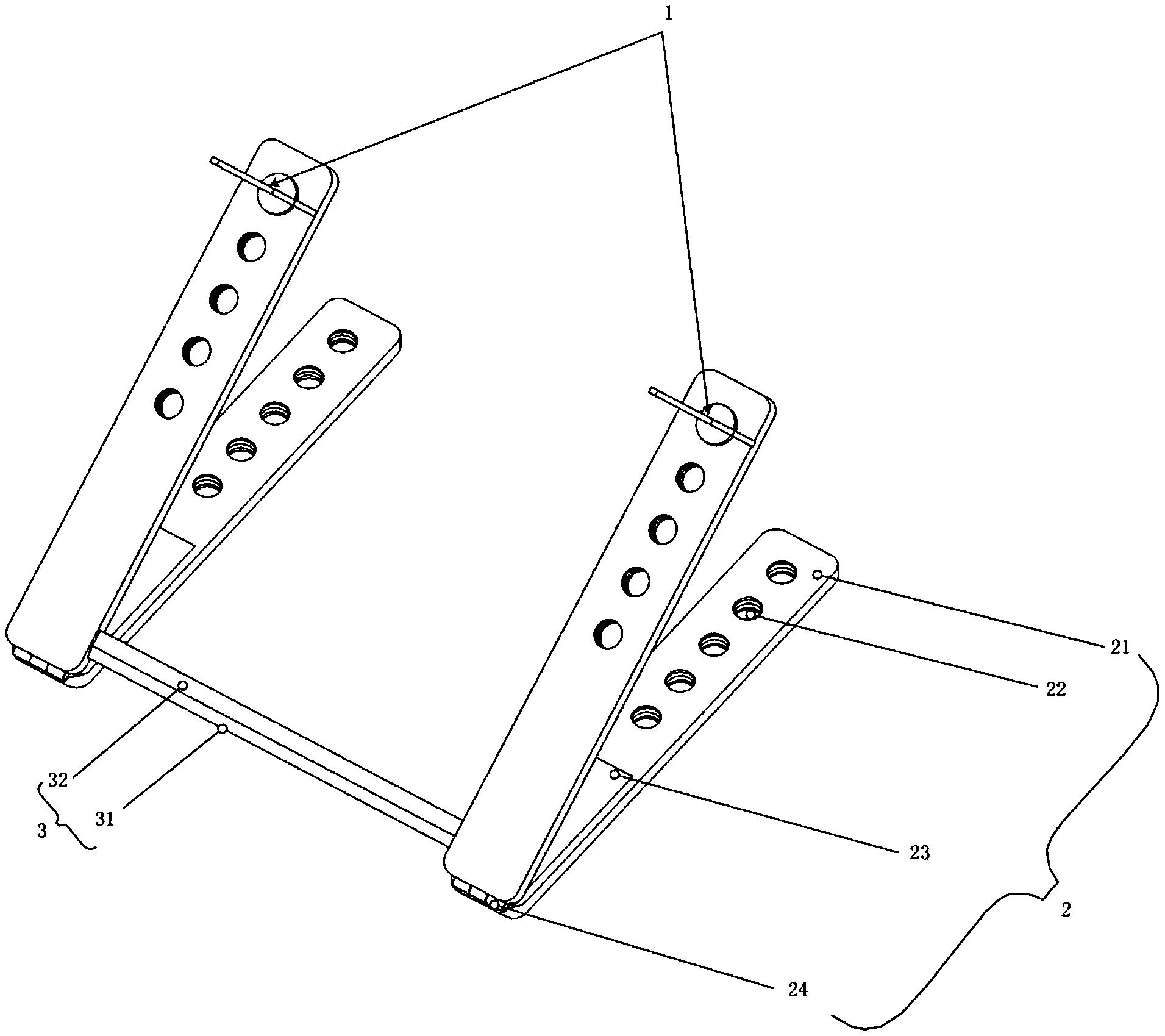
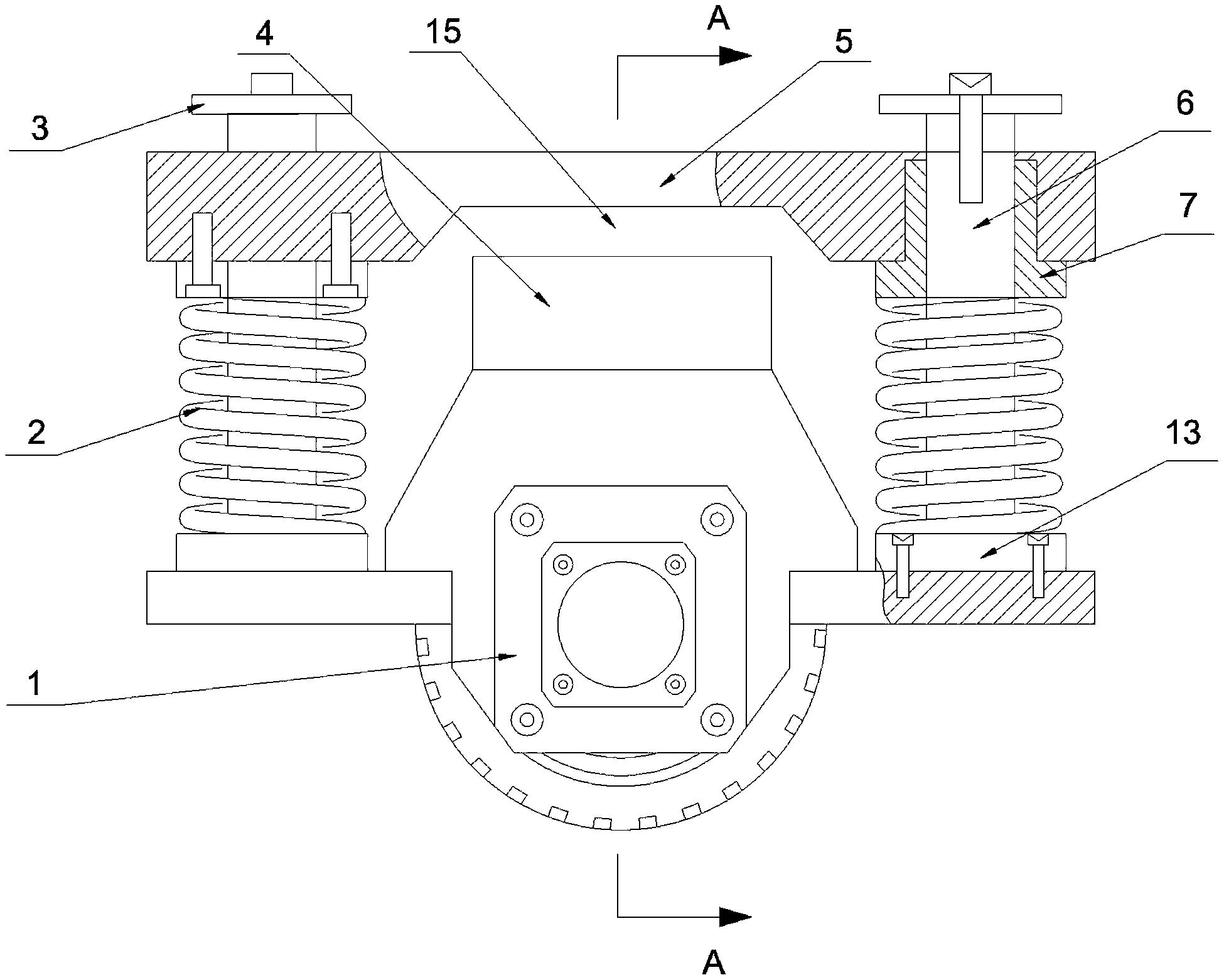
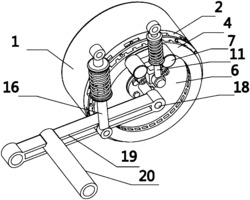
图1为本实用新型所述的无转向系可全向移动的电动运载平台侧视图。
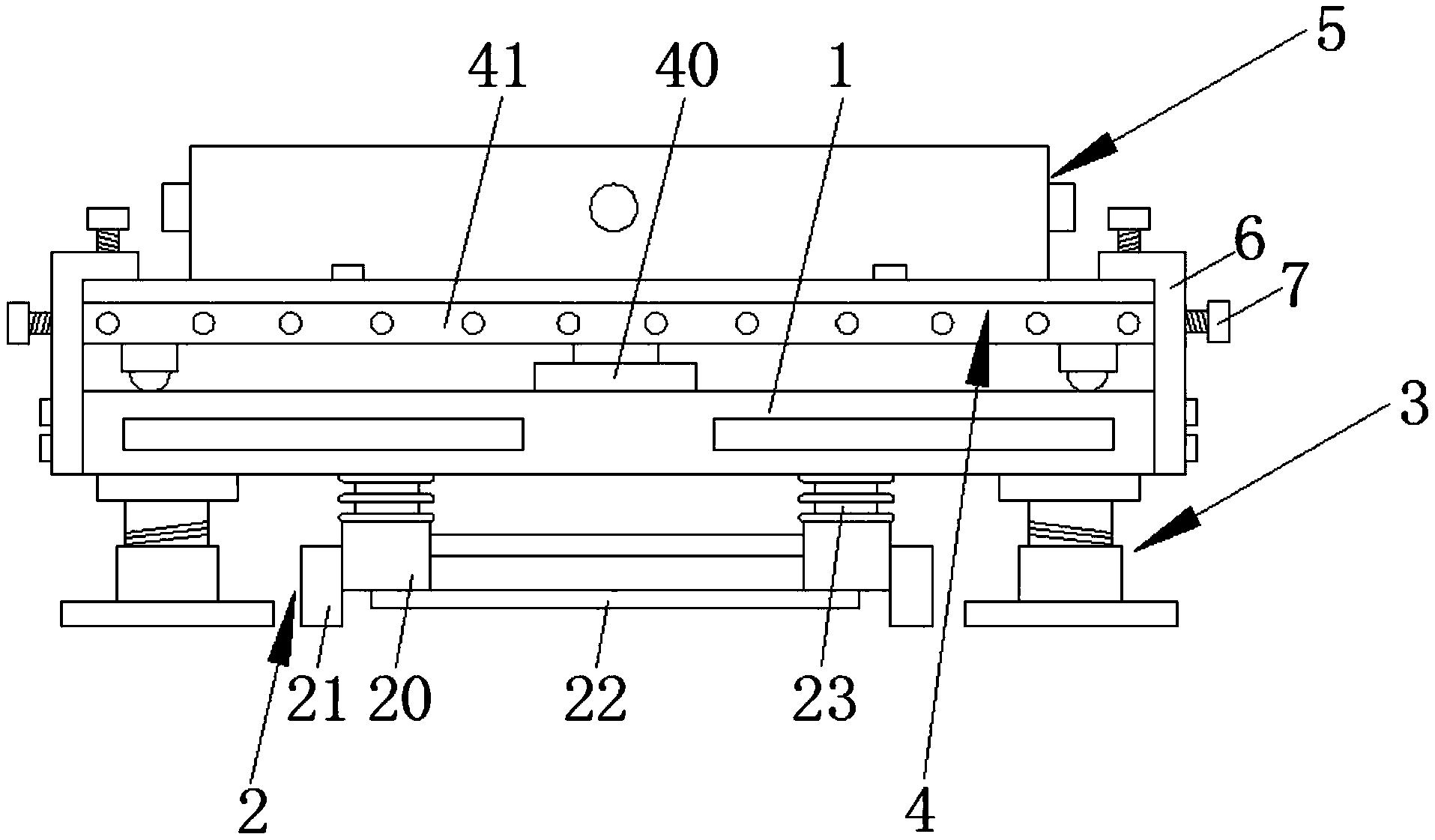
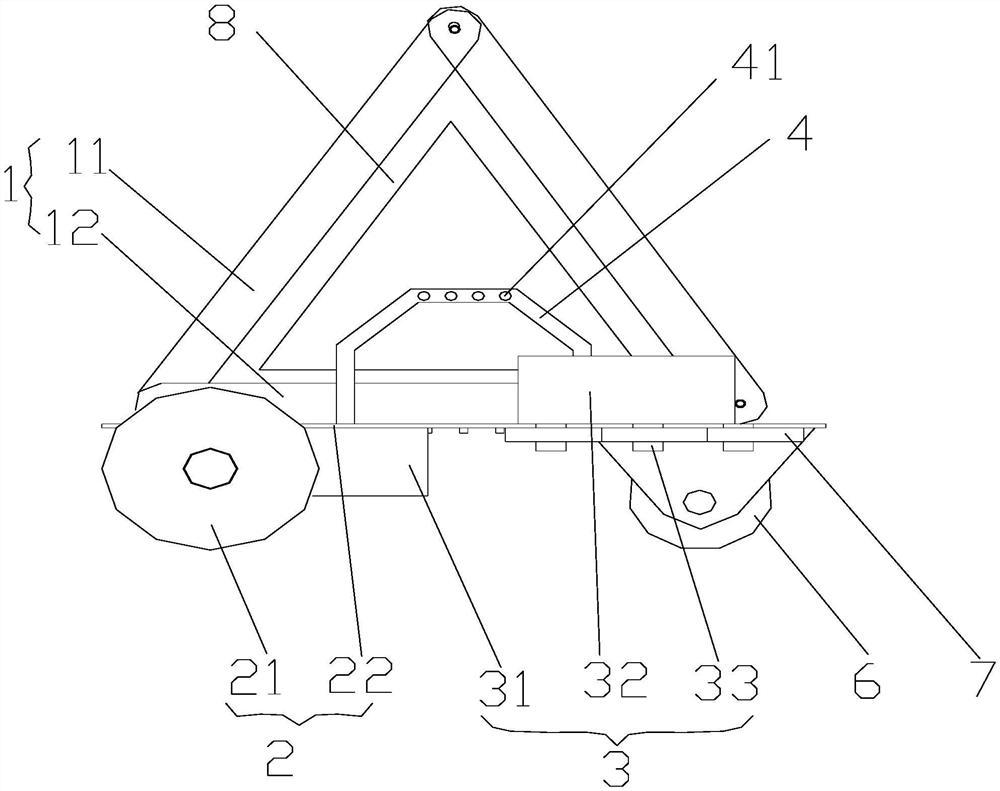
图2为本实用新型所述的无转向系可全向移动的电动运载平台正视图。
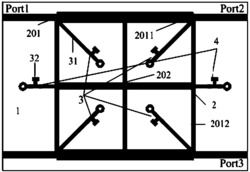
图3为本实用新型所述的无转向系可全向移动的电动运载平台俯视图。
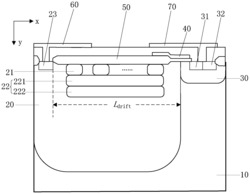
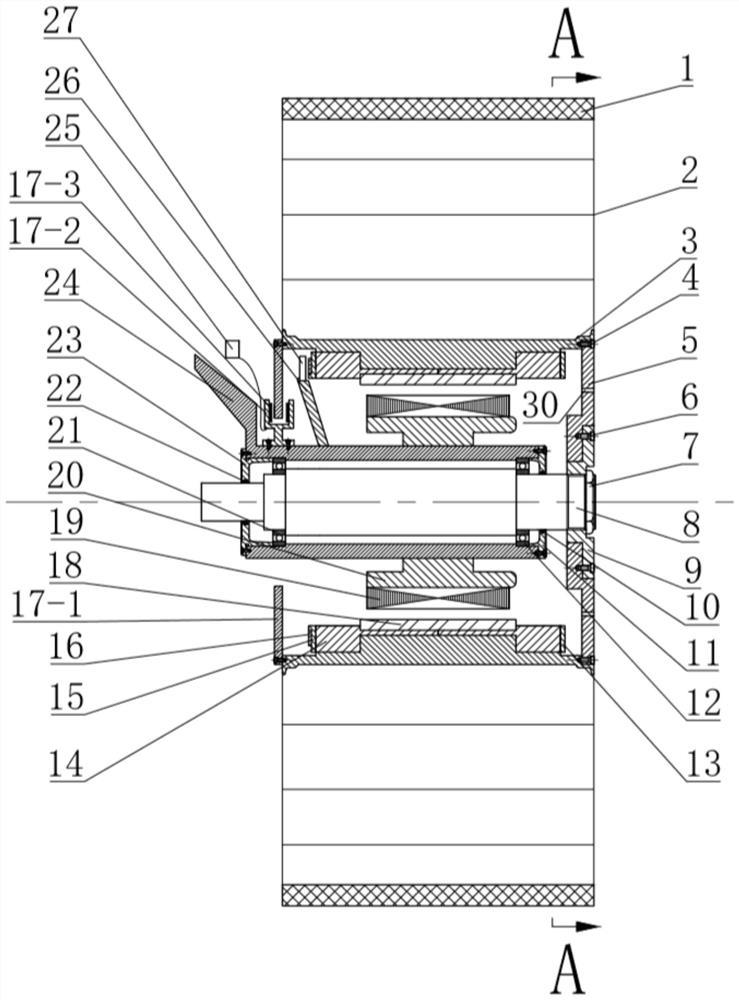
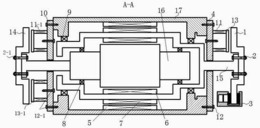
图4为本实用新型所述的模块化集成行进轮结构示意图。
图5为电动运载平台直行(前进)模式行进轮驱动旋向示意图。
图6为电动运载平台直行(后退)模式行进轮驱动旋向示意图。
图7为电动运载平台横行(左向)模式行进轮驱动旋向示意图。
图8为电动运载平台横行(右向)模式行进轮驱动旋向示意图。
图9为电动运载平台斜行(向右前方形式)模式行进轮驱动旋向示意图。
图10为电动运载平台斜行(向左前方形式)模式行进轮驱动旋向示意图。
图11为电动运载平台原地转向(顺时针)行进轮驱动旋向示意图。
图12为电动运载平台原地转向(逆时针)行进轮驱动旋向示意图。
具体实施方式
下面结合附图对本实用新型做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
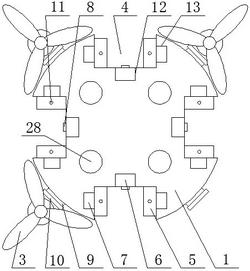
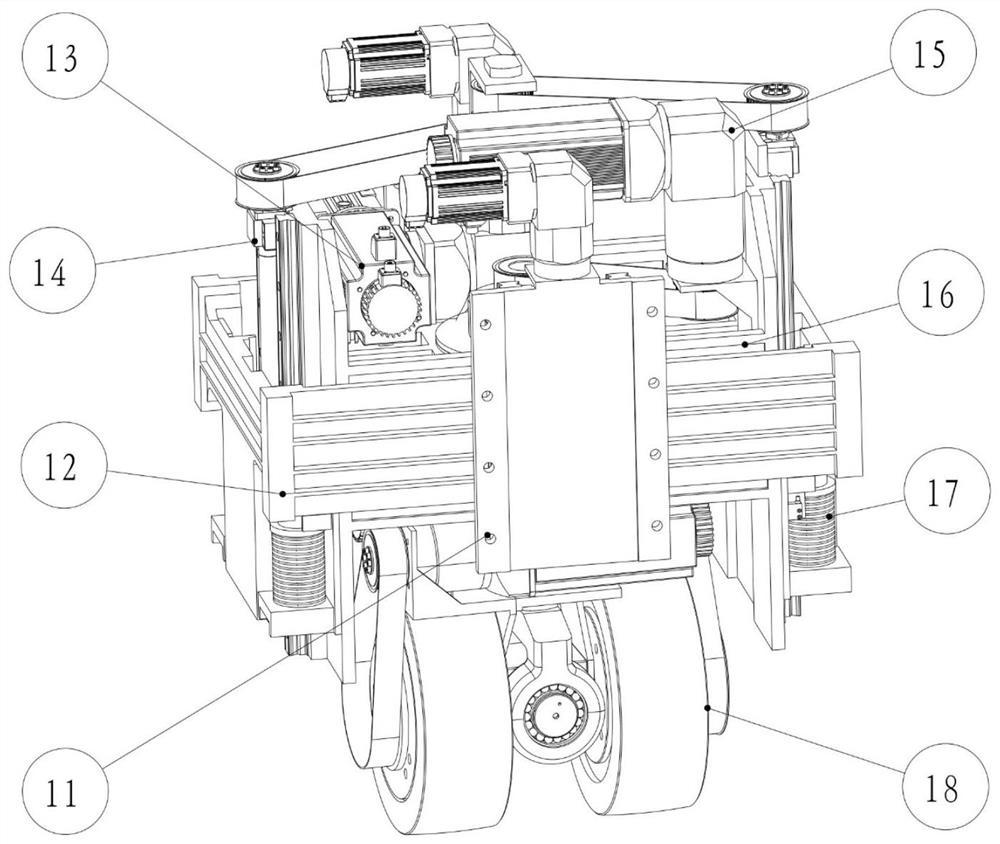
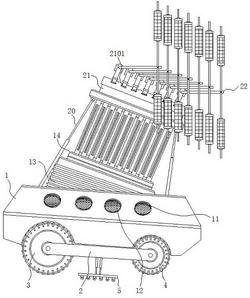
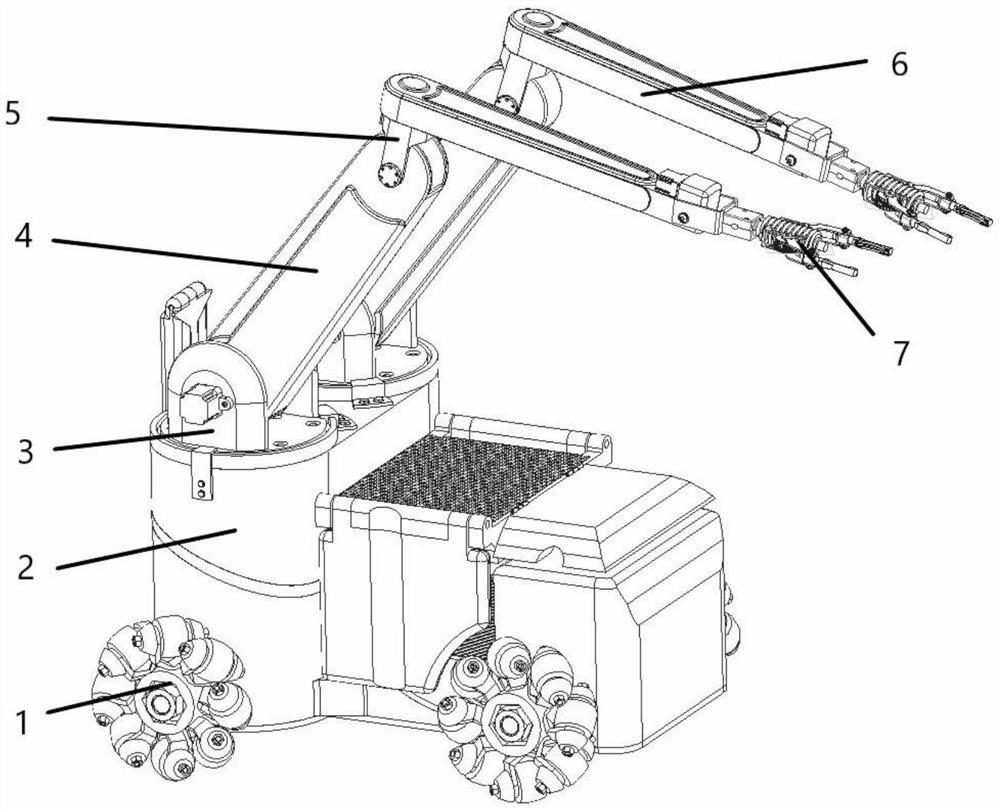
如图1-4所示,本实用新型提供了一种无转向系可全向移动的电动运载平台,主要包括:承载平台110、多个行进轮120、轮胎130、多根行进轮轴140多组弹簧悬架150及电池组160。其中,每个行进轮120内分别安装有集成式轮毂电机。
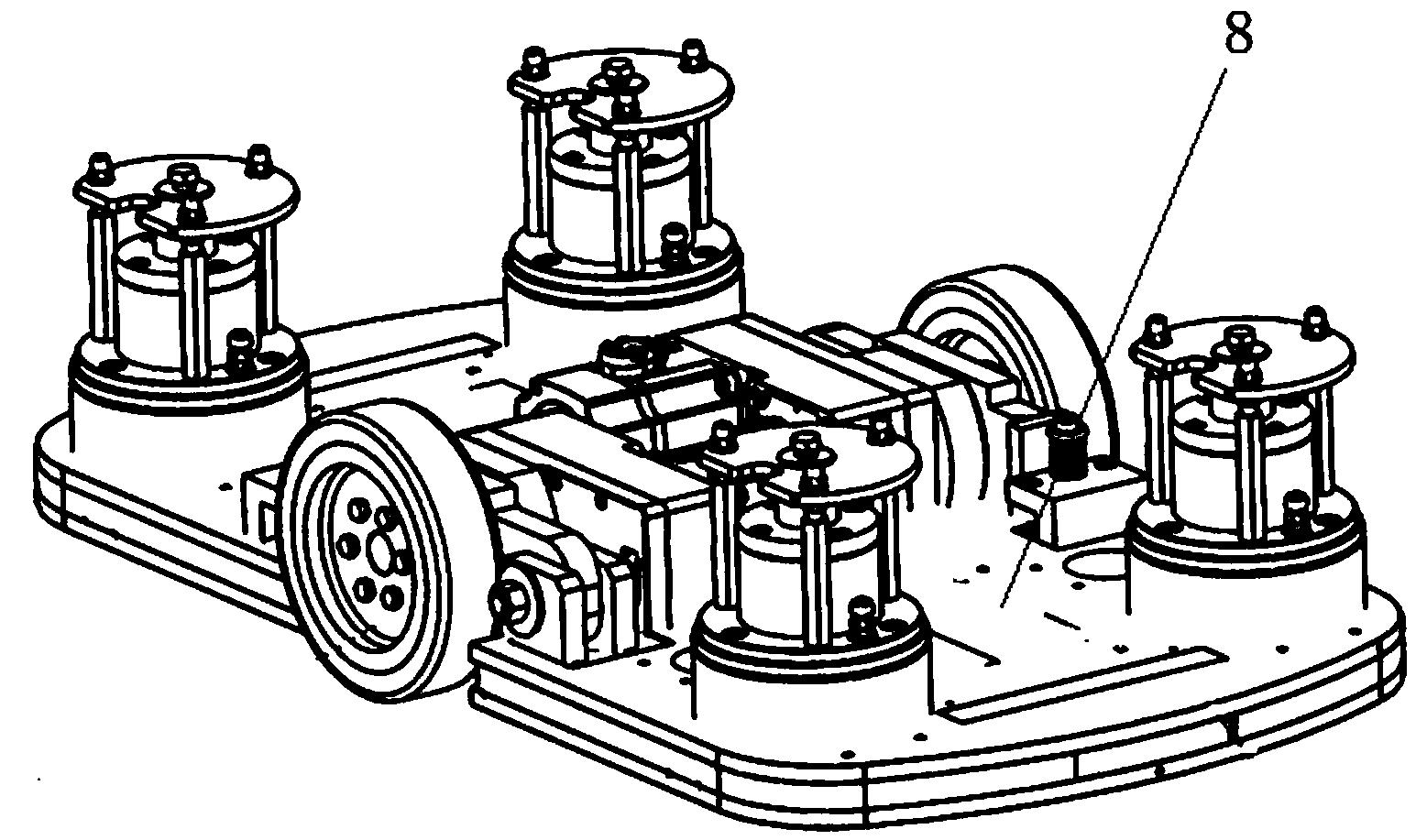
如图1-3所示,在本实施例中,行进轮120的个数为四个,四个行进轮120分别在承载平台110的左右两侧对称设置,并且两个相对称的行进轮120靠近承载平台110的前端设置,另外两个相对称的行进轮120靠近承载平台110的后端设置。轮毂电机集成于行进轮120内部,直接驱动行进轮120旋转。各行进轮120通过行进轮轴140与承载平台110对应位置的弹簧悬架150连接。其中,在承载平台110内具有放置电池组的两个空腔,所述两个空腔分别设置在承载平台110前后两端,并且分别位于靠近行进轮120的位置。两组电池组160分别固定安装在所述两个空腔内,电池组160负责整个电动运载平台的能源供应。承载平台110中部固定安装有平台控制器170以及四个轮毂电机控制器180,四个轮毂电机控制器180分别用于控制四个行进轮120轮毂电机,轮毂电机控制器180与轮毂电机为一一对应控制关系。承载平台110的上方设置有连接装置,用于固定安装所需的配套设备。其中,可以根据电动平台的实际用途,在其上方安装不同的设备,使其成为一个通用性极强的多功能电动移动平台。
如图2所示,承载平台110的下侧具有连接部111,行进轮轴140一端与行进轮120相连,另一端与连接部111铰接;行进轮轴140的与连接部111连接的一端可以绕铰接点111a上下转动,从而使行进轮120具有一定的上下跳动自由度,铰接点111a处安装有橡胶衬套,起到阻尼的作用以防止系统震荡。悬架弹簧150与承载平台110垂直设置,悬架弹簧150下端与行进轮轴140中部固定连接,上端与承载平台110下部的对应位置相连接;悬架弹簧150起到减缓冲击的作用,四组悬架弹簧结构相同。考虑到电动运载平台主要工作在工况较好的平整路面,且运行速度较低,图示所设计的悬架系统能够保证平台平稳行驶,但悬架弹簧的结构不局限于此。
由于本实用新型提供的无转向系可全向移动的电动运载平台,各部件之间并无复杂的机械连接部分,且各部件通用性较强,实现模块化构型,电动运载平台的结构并不局限于图示,可根据实际工作需要,对相应的系统进行替换。
如图4所示,行进轮120的轮辋121内安装有集成式轮毂电机,在本实施例中,所述轮毂电机采用低速外转子电机,无减速装置。其中,电机定子210与行进轮轴140通过法兰220固定连接,行进轮120可绕行进轮轴140自由转动;电机外转子与轮辋121相连接,永磁体230固定在电机外转子上,电机驱动器240通过CAN线200接收对应轮毂电机控制器180的控制信号,对电磁绕组250进行通电,驱动轮毂电机转动,动力会直接输出给行进轮120,进而使行进轮120完成旋转。行进轮120的轮辋121外侧安装轮胎130,轮胎130的胎面具有多条带状凸起131,多条带状凸起131平行间隔排布;带状凸起131的沿行进轮120径向的截面为近似半圆形,带状凸起131的母线方向与行进轮120滚动方向之间成45°角。
其中,如图3所示,在承载平台110两侧相对称的两个行进轮120上安装的轮胎的带状凸起131方向对称,而在承载平台110对角线上的两个轮胎的带状凸起131方向相同;即左前轮120a与右前轮120b轮胎带状凸起131方向对称,左后轮120c与右后轮120d轮胎带状凸起131方向对称;而左前轮120a与右后轮120d轮胎带状凸起131方向一致,右前轮120b与左后轮120c轮胎带状凸起131方向一致。利用轮胎130上的带状凸起131与地面接触部分产生作用力,驱动平台移动。轮毂电机外侧备份的机械式刹车盘260与电机外转子相连接,负责解决当电制动不足或失效时电动平台的制动问题。机械式刹车盘260与电机定子210间安装有轮动轴承270,起到径向支撑的作用。
如图1-2所示,在本实施例中,在承载平台110前端不被遮挡的位置,固定安装有用于接收远程遥控信号(包括平台操控信号和平台移动模式信号)的接收装置190及信号解码装置191,通过信号解码器191将平台操控信号及平台移动模式信号转换为CAN信号,通过CAN线200与平台控制器170电联,可实现电动移动平台的远程操控。
在另一种实施例中,在电动移动平台前端固定加装驾驶室,完成平台的直接操纵驾驶。采用上装驾驶室直接操控时,平台操控信号(油门、制动踏板开度信号)和平台移动模式信号,通过CAN线200发送到平台控制器170。
无论电动运载平台采用远程遥控控制方式还是驾驶室直接操控方式,平台控制器170需要接收到的操控信号包括:油门(前进)踏板开度信号、制动(后退)踏板开度信号;平台移动模式信号包括:直线行驶、横向行驶、斜向行驶及原地转向模式开关信号。
此外,平台控制器170还与各轮毂电机控制器180通过CAN线200通讯,平台控制器170向轮毂电机控制器180发送各轮毂电机的转矩控制信号,以及接收各行进轮120的转速反馈信号。而轮毂电机控制器180直接控制各行进轮120内的轮毂电机进行转矩输出。
在本实施例中,左前轮120a轮胎凸起的母线与滚动方向成-45°(逆时针偏转),相反,右前轮120b轮胎凸起的母线与滚动方向成45°(顺时针偏转)。轮胎与地面的实际接触部分始终为各带状凸起131相对行进轮120的中心最外侧的母线,由于带状凸起131的母线与行进轮120滚动方向成45°,轮胎130实际受到的地面反力应与带状凸起131的母线垂直,每种移动模式下每个轮胎的实际受力方向和每个行进轮的驱动旋转方向如图5-12所示,图中Ffl表示左前轮受到的地面作用力方向,Ffr表示右前轮受到的地面作用力方向,Frl表示左后轮受到的地面作用力方向,Frr表示右后轮受到的地面作用力方向;当车轮转动方向相同时,由于对角行进轮120安装具有相同方向带状凸起131方的轮胎,所以其受到的地面力方向相同。以各行进轮120向前滚动为例,左前轮120a与右后轮120d受到与行驶方向成45°(顺时针偏转)的地面反力,同理右前轮120b与左后轮则受到与行驶方向成-45°(逆时针偏转)的地面反力。结合附图对各行驶模式行进轮120滚动方向与受力方向进行说明。
如图5、图6所示,直行模式下各行进轮120滚动方向始终与平台期望行驶方向相同,通过平均分配各行进轮120驱动转矩以抵消轮胎带状凸起131导致的地面侧向力。图7、图8所示为横向模式,此模式下需保证同侧前后车轮的滚动方向相反,以抵消轮胎滚动的纵向力。当向左行驶时,左前轮120a与右后轮120d滚当方向向后,以提供相同的向左后方的轮胎力,而右前轮120b与左后轮120c则向前滚动,以提供向左前方的轮胎力,各轮胎力合成后最终只具有使平台左移的地面力,向右行驶时则各轮滚动方向均相反。图9、图10所示为斜行模式,此模式下驱动转矩只分配给对角两个行进轮120,且保持对角轮滚动方向相同,当平台向与正前方顺时针偏转45°方向行驶时,只驱动左前轮120a与右后轮120d,其余两个车轮作为从动轮;反之,向逆时针偏转45°方向行驶时,则只实用新型右前轮120b与左后轮120c。图11、图12为原地转向模式,为使各行进轮120产生绕平台中心相同方向的驱动力,需保证同侧轮滚动方向形同且与对侧轮滚动方向相反。当平台顺时针转向时,左前轮120a与左后轮120c向前滚动,对侧的右前轮120b与右后轮120d则向后滚动,从而产生绕平台中心的回转力矩驱动平台顺时针转向;反之,则右侧两行进轮120向前滚动,左侧轮向后滚动。
尽管本实用新型的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本实用新型的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本实用新型并不限于特定的细节和这里示出与描述的图例。
一种无转向系可全向移动的电动运载平台专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0