







专利摘要
涵道式低潜飞行器属于飞行器技术领域,目的在于解决现有技术存在的涵道式飞行器只能在空中进行飞行的问题。本发明包括:开有两个下舱门的中层安装板;固定设置在中层安装板上上机壳,上机壳和下舱门对应位置开有两个上舱门,固定设置在上机壳上的尾翼;固定设置在中层安装板上的尾部推进器;对称设置在中层安装板两侧的四个方向调节器;设置在上机壳和中层安装板形成的腔体内部的两个涵道机构和动力调节机构,动力调节机构输入端和一个电机连接,输出端分别和两个涵道机构输入端连接;本发明的电池组通过电源线与电源调节器连接,电源调节器与电调组连接,电调组分别与每个电机连接;主控制器通过通讯线和每个电机、电源调节器以及电调组连接。
权利要求
1.涵道式低潜飞行器,其特征在于,包括:
中层安装板(14),所述中层安装板(14)在长度方向上开有两个下舱门(16);
固定设置在所述中层安装板(14)上部的上机壳(4),所述上机壳(4)和所述中层安装板(14)之间形成腔体,所述上机壳(4)和所述下舱门(16)对应位置开有两个上舱门(2),
固定设置在所述上机壳(4)尾部的尾翼(1);
固定设置在所述中层安装板(14)尾部的尾部推进器(6);
固定设置在所述中层安装板(14)侧壁的储水器(3),所述储水器(3)上设置有储水器阀门(15);
对称设置在中层安装板(14)两侧的四个方向调节器(5),每一个方向调节器(5)输入端分别和一个电机(7)连接,共有四个电机(7);
设置在上机壳(4)和中层安装板(14)形成的腔体内部的两个涵道机构(8),两个涵道机构(8)分别和所述上舱门(2)位置对应;
固定设置在中层安装板(14)上的动力调节机构(13),所述动力调节机构(13)输入端和一个电机(7)连接,与动力调节机构(13)连接的电机(7)和与方向调节器(5)连接的电机(7)不是同一电机(7),输出端分别和两个涵道机构(8)输入端连接;
以及固定设置在所述中层安装板(14)上的电池组(9)、电源调节器(10)、电调组(11)和主控制器(12),电池组(9)通过电源线与电源调节器(10)连接,电源调节器(10)与电调组(11)连接,电调组(11)分别与每个电机(7)通过电线连接;主控制器(12)分别通过通讯线和每个电机(7)、电源调节器(10)以及电调组(11)连接;
所述方向调节器(5)包括输入轴(522)、主动轮(521)、棘轮离合器(501)、行星架Ⅰ(502)、行星架Ⅱ(518)、轴Ⅰ(503)、行星轮Ⅰ(504)、行星轮Ⅱ(520)、离合器Ⅰ(505)、外齿圈(506)、轴Ⅱ(514)、超越离合器、轴Ⅲ(517)、轴Ⅳ(519)、锥齿轮Ⅰ(507)、锥齿轮Ⅱ(509)、桨叶Ⅰ(510)、桨毂(511)、输出轴(512)和导流壳(513);
棘轮离合器(501)和行星架Ⅰ(502)固定连接,输入轴(522)穿过行星架Ⅰ(502)通过键和主动轮(521)过盈连接,输入轴(522)另一端和一个电机(7)连接,与所述输入轴(522)另一端连接的电机(7)和与动力调节机构(13)及方向调节器(5)连接的电机(7)不是同一电机(7);所述行星轮Ⅰ(504)和行星轮Ⅱ(520)分别和主动轮(521)啮合,所述轴Ⅰ(503)与轴Ⅳ(519)分别和行星轮Ⅰ(504)与行星轮Ⅱ(520)过盈连接,所述轴Ⅰ(503)与轴Ⅳ(519)的一端分别和所述行星架Ⅰ(502)连接,另一端分别和行星架Ⅱ(518)连接;所述行星轮Ⅰ(504)和行星轮Ⅱ(520)分别和外齿圈(506)啮合,离合器Ⅰ(505)与所述外齿圈(506)连接,所述外齿圈(506)和所述导流壳(513)固定连接;所述外齿圈(506)伸入导流壳(513)内部一端通过轴承和所述轴Ⅲ(517)连接,所述轴Ⅲ(517)一端和所述行星架Ⅱ(518)中心固定连接,另一端通过超越离合器和所述轴Ⅱ(514)一端连接,所述轴Ⅱ(514)和所述导流壳(513)内壁之间设置有轴承,所述轴Ⅱ(514)的另一端通过键和所述锥齿轮Ⅰ(507)固定连接,所述锥齿轮Ⅰ(507)和锥齿轮Ⅱ(509)啮合,所述锥齿轮Ⅱ(509)和所述输出轴(512)一端通过键固定连接,所述输出轴(512)的另一端伸出所述导流壳(513)和所述桨毂(511)固定连接,所述桨毂(511)和桨叶Ⅰ(510)连接,所述输出轴(512)和所述导流壳(513)之间设置有轴承,所述方向调节器(5)的输出轴(512)和所述中层安装板(14)的侧壁平行。
2.根据权利要求1所述的涵道式低潜飞行器,其特征在于,轴Ⅲ(517)另一端通过超越离合器和所述轴Ⅱ(514)一端连接具体为:外齿圈(506)和超越离合器外圈(515)连接,轴Ⅲ(517)通过键和超越离合器内圈(516)连接,超越离合器外圈(515)和超越离合器内圈(516)连接,超越离合器外圈(515)通过键和轴Ⅱ(514)连接。
3.根据权利要求1或2所述的涵道式低潜飞行器,其特征在于,所述轴Ⅱ(514)和所述锥齿轮Ⅰ(507)连接的一端的端部设置有卡圈(508),所述输出轴(512)和所述锥齿轮Ⅱ(509)连接的一端的端部设置有卡圈(508)。
4.根据权利要求1或2所述的涵道式低潜飞行器,其特征在于,所述行星轮Ⅰ(504)和行星轮Ⅱ(520)关于主动轮(521)对称设置。
5.根据权利要求1所述的涵道式低潜飞行器,其特征在于,所述动力调节机构(13)包括轴Ⅷ(1309)、离合器Ⅱ(1308)、轴Ⅶ(1307)、固定外壳(1305)、锥齿轮Ⅴ(1306)、锥齿轮Ⅲ(1302)、锥齿轮Ⅳ(1303)、轴Ⅴ(1301)和轴Ⅵ(1304);所述轴Ⅷ(1309)一端和一个电机(7)输出轴(512)连接,与所述轴Ⅷ(1309)连接的电机(7)和与输入轴(522)、动力调节机构(13)及方向调节器(5)连接的电机(7)不是同一电机(7),另一端通过离合器Ⅱ(1308)和轴Ⅶ(1307)一端连接,所述轴Ⅷ(1309)通过轴承和所述中层安装板(14)连接,所述轴Ⅶ(1307)伸入固定外壳(1305)和所述锥齿轮Ⅴ(1306)固定连接,所述锥齿轮Ⅴ(1306)分别和所述锥齿轮Ⅲ(1302)、锥齿轮Ⅳ(1303)啮合,所述锥齿轮Ⅲ(1302)和锥齿轮Ⅳ(1303)分别与所述轴Ⅴ(1301)和轴Ⅵ(1304)的一端固定连接,所述轴Ⅴ(1301)和轴Ⅵ(1304)的另一端伸出所述固定外壳(1305)分别和一组涵道机构(8)连接带动涵道机构(8)转动,所述轴Ⅶ(1307)和所述固定外壳(1305)接触处设置有轴承。
6.根据权利要求1所述的涵道式低潜飞行器,其特征在于,所述涵道机构(8)包括涵道外壳(801)、支撑架(802)、桨叶Ⅱ(803)、导流罩(804)、旋转体(805)、连接体(806)、上传动轴(807)、桨盘Ⅰ(808)、下传动轴(811)、桨盘Ⅱ(812)以及设置在旋转体(805)内部的锥齿轮Ⅵ(809)、锥齿轮Ⅶ(810)和锥齿轮Ⅷ(813);
所述涵道外壳(801)呈圆柱状,圆筒状旋转体(805)上下设置有连接体(806),所述连接体(806)经支撑架(802)与所述涵道外壳(801)内壁固定连接;所述桨盘Ⅰ(808)和桨盘Ⅱ(812)的外圆周都均布三片桨叶Ⅱ(803);
所述锥齿轮Ⅶ(810)分别与锥齿轮Ⅵ(809)和锥齿轮Ⅷ(813)啮合,锥齿轮Ⅵ(809)与上传动轴(807)固定连接,锥齿轮Ⅷ(813)与下传动轴(811)固定连接;所述上传动轴(807)的一端和所述下传动轴(811)的一端通过填入式滚动轴承连接,所述上传动轴(807)的另一端穿过所述旋转体(805)上部的连接体(806)与所述桨盘Ⅰ(808)固定连接,所述下传动轴(811)的另一端穿过所述旋转体(805)下部的连接体(806)与所述桨盘Ⅱ(812)固定连接,所述上传动轴(807)和下传动轴(811)通过双列角接触球轴承和所述连接体(806)连接,所述上传动轴(807)上端和所述导流罩(804)通过螺纹连接;
两组涵道机构(8)的锥齿轮Ⅶ(810)分别与轴Ⅴ(1301)和轴Ⅵ(1304)固定连接,轴Ⅴ(1301)和轴Ⅵ(1304)分别与一个双列角接触球轴承过盈配合。
7.根据权利要求1所述的涵道式低潜飞行器,其特征在于,所述尾部推进器(6)包括推进电机(601)、联轴器(602)、轴承(603)、推进桨输出轴(604)、推进桨毂(605)和推进桨(606);
所述推进电机(601)固结在中层安装板(14),通过联轴器(602)和推进桨输出轴(604)连接,推进桨输出轴(604)和轴承(603)连接,轴承(603)外壳固结在中层安装板(14)上,推进桨输出轴(604)通过推进桨毂(605)和推进桨(606)连接。
说明书
技术领域
本发明属于飞行器技术领域,具体涉及一种涵道式低潜飞行器。
背景技术
目前水陆两栖船由于其具备卓越的水陆通行性能,可从行进中渡越江河湖海而不受桥或船的限制,因而在交通运输上,具有其特殊的历史意义,多用于军事,救灾救难,探测等专业领域,后经开发改造用于旅游。目前很多飞行器用来在海面上进行侦查,飞行器在空中执行任务时有时会碰到无法摆脱的危险,在海洋上空飞行器只需要进入水中就可以摆脱危险,近年来水空两用的飞行器虽然还不多见,但是水空两用的飞行器的开发已经引起人们的关注。
发明内容
本发明的目的在于提出一种涵道式低潜飞行器,解决现有技术存在的涵道式飞行器只能在空中进行飞行的问题。
为实现上述目的,本发明的涵道式低潜飞行器包括:
中层安装板,所述中层安装板在长度方向上开有两个下舱门;
固定设置在所述中层安装板上部的上机壳,所述上机壳和所述中层安装板之间形成腔体,所述上机壳和所述下舱门对应位置开有两个上舱门,
固定设置在所述上机壳尾部的尾翼;
固定设置在所述中层安装板尾部的尾部推进器;
固定设置在所述中层安装板侧壁的储水器,所述储水器上设置有储水器阀门;
对称设置在中层安装板两侧的四个方向调节器,每一个方向调节器输入端分别和一个电机连接,共有四个电机;
设置在上机壳和中层安装板形成的腔体内部的两个涵道机构,两个涵道机构分别和所述上舱门位置对应;
固定设置在中层安装板上的动力调节机构,所述动力调节机构输入端和一个电机连接,与动力调节机构连接的电机和与方向调节器连接的电机不是同一电机,输出端分别和两个涵道机构输入端连接;
以及固定设置在所述中层安装板上的电池组、电源调节器、电调组和主控制器,电池组通过电源线与电源调节器连接,电源调节器与电调组连接,电调组分别与每个电机通过电线连接;主控制器分别通过通讯线和每个电机、电源调节器以及电调组连接。
所述方向调节器包括输入轴、主动轮、棘轮离合器、行星架Ⅰ、行星架Ⅱ、轴Ⅰ、行星轮Ⅰ、行星轮Ⅱ、离合器Ⅰ、外齿圈、轴Ⅱ、超越离合器、轴Ⅲ、轴Ⅳ、锥齿轮Ⅰ、锥齿轮Ⅱ、桨叶Ⅰ、桨毂、输出轴和导流壳;
棘轮离合器和行星架Ⅰ固定连接,输入轴穿过行星架Ⅰ通过键和主动轮过盈连接,输入轴另一端和一个电机连接,与所述输入轴另一端连接的电机和与动力调节机构及方向调节器连接的电机不是同一电机;所述行星轮Ⅰ和行星轮Ⅱ分别和主动轮啮合,所述轴Ⅰ与轴Ⅳ分别和行星轮Ⅰ与行星轮Ⅱ过盈连接,所述轴Ⅰ与轴Ⅳ的一端分别和所述行星架Ⅰ连接,另一端分别和行星架Ⅱ连接;所述行星轮Ⅰ和行星轮Ⅱ分别和外齿圈啮合,离合器Ⅰ与所述外齿圈连接,所述外齿圈和所述导流壳固定连接;所述外齿圈伸入导流壳内部一端通过轴承和所述轴Ⅲ连接,所述轴Ⅲ一端和所述行星架Ⅱ中心固定连接,另一端通过超越离合器和所述轴Ⅱ一端连接,所述轴Ⅱ和所述导流壳内壁之间设置有轴承,所述轴Ⅱ的另一端通过键和所述锥齿轮Ⅰ固定连接,所述锥齿轮Ⅰ和锥齿轮Ⅱ啮合,所述锥齿轮Ⅱ和所述输出轴一端通过键固定连接,所述输出轴的另一端伸出所述导流壳和所述桨毂固定连接,所述桨毂和桨叶Ⅰ连接,所述输出轴和所述导流壳之间设置有轴承,所述方向调节器的输出轴和所述中层安装板的侧壁平行。
轴Ⅲ另一端通过超越离合器和所述轴Ⅱ一端连接具体为:外齿圈和超越离合器外圈连接,轴Ⅲ通过键和超越离合器内圈连接,超越离合器外圈和超越离合器内圈连接,超越离合器外圈通过键和轴Ⅱ连接。
所述轴Ⅱ和所述锥齿轮Ⅰ连接的一端的端部设置有卡圈,所述输出轴和所述锥齿轮Ⅱ连接的一端的端部设置有卡圈。
所述行星轮Ⅰ和行星轮Ⅱ关于主动轮对称设置。
所述动力调节机构包括轴Ⅷ、离合器Ⅱ、轴Ⅶ、固定外壳、锥齿轮Ⅴ、锥齿轮Ⅲ、锥齿轮Ⅳ、轴Ⅴ和轴Ⅵ;所述轴Ⅷ一端和一个电机输出轴连接,与所述轴Ⅷ连接的电机和与输入轴、动力调节机构及方向调节器连接的电机不是同一电机,另一端通过离合器Ⅱ和轴Ⅶ一端连接,所述轴Ⅷ通过轴承和所述中层安装板连接,所述轴Ⅶ伸入固定外壳和所述锥齿轮Ⅴ固定连接,所述锥齿轮Ⅴ分别和所述锥齿轮Ⅲ、锥齿轮Ⅳ啮合,所述锥齿轮Ⅲ和锥齿轮Ⅳ分别与所述轴Ⅴ和轴Ⅵ的一端固定连接,所述轴Ⅴ和轴Ⅵ的另一端伸出所述固定外壳分别和一组涵道机构连接带动涵道机构转动,所述轴Ⅶ和所述固定外壳接触处设置有轴承。
所述涵道机构包括涵道外壳、支撑架、桨叶Ⅱ、导流罩、旋转体、连接体、上传动轴、桨盘Ⅰ、下传动轴、桨盘Ⅱ以及设置在旋转体内部的锥齿轮Ⅵ、锥齿轮Ⅶ和锥齿轮Ⅷ;
所述涵道外壳呈圆柱状,圆筒状旋转体上下设置有连接体,所述连接体经支撑架与所述涵道外壳内壁固定连接;所述桨盘Ⅰ和桨盘Ⅱ的外圆周都均布三片桨叶Ⅱ;
所述锥齿轮Ⅶ分别与锥齿轮Ⅵ和锥齿轮Ⅷ啮合,锥齿轮Ⅵ与上传动轴固定连接,锥齿轮Ⅷ与下传动轴固定连接;所述上传动轴的一端和所述下传动轴的一端通过填入式滚动轴承连接,所述上传动轴的另一端穿过所述旋转体上部的连接体与所述桨盘Ⅰ固定连接,所述下传动轴的另一端穿过所述旋转体下部的连接体与所述桨盘Ⅱ固定连接,所述上传动轴和下传动轴通过双列角接触球轴承和所述连接体连接,所述上传动轴上端和所述导流罩通过螺纹连接;
两组涵道机构的锥齿轮Ⅶ分别与轴Ⅴ和轴Ⅵ固定连接,轴Ⅴ和轴Ⅵ分别与一个双列角接触球轴承过盈配合。
所述尾部推进器包括推进电机、联轴器、轴承、推进桨输出轴、推进桨毂和推进桨;所述推进电机固结在中层安装板,通过联轴器和推进桨输出轴连接,推进桨输出轴和轴承连接,轴承外壳固结在中层安装板上,推进桨输出轴通过推进桨毂和推进桨连接。
本发明的有益效果为:本发明的涵道式低潜飞行器在水下行驶时:上舱门和下舱门完全封闭,涵道机构不工作,飞行器行驶依靠尾部推进器来提供前进动力,方向调节器来进行行驶方向调整。在飞行器运行过程中由电源调节器调节电池组的使用情况,由主控制器控制整机运行状况。
在空中行驶时:上舱门和下舱门打开,涵道机构提供飞行动力,方向调节器可进行方向的微调。在飞行器运行过程中由电源调节器调节电池组的使用情况,由主控制器控制整机运行状况。
本发明通过上舱门和下舱门的开启与关闭实现工作状态的切换,实现水下和空中两种工作模式。
附图说明
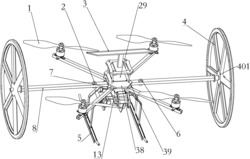
图1为本发明的涵道式低潜飞行器轴测图;
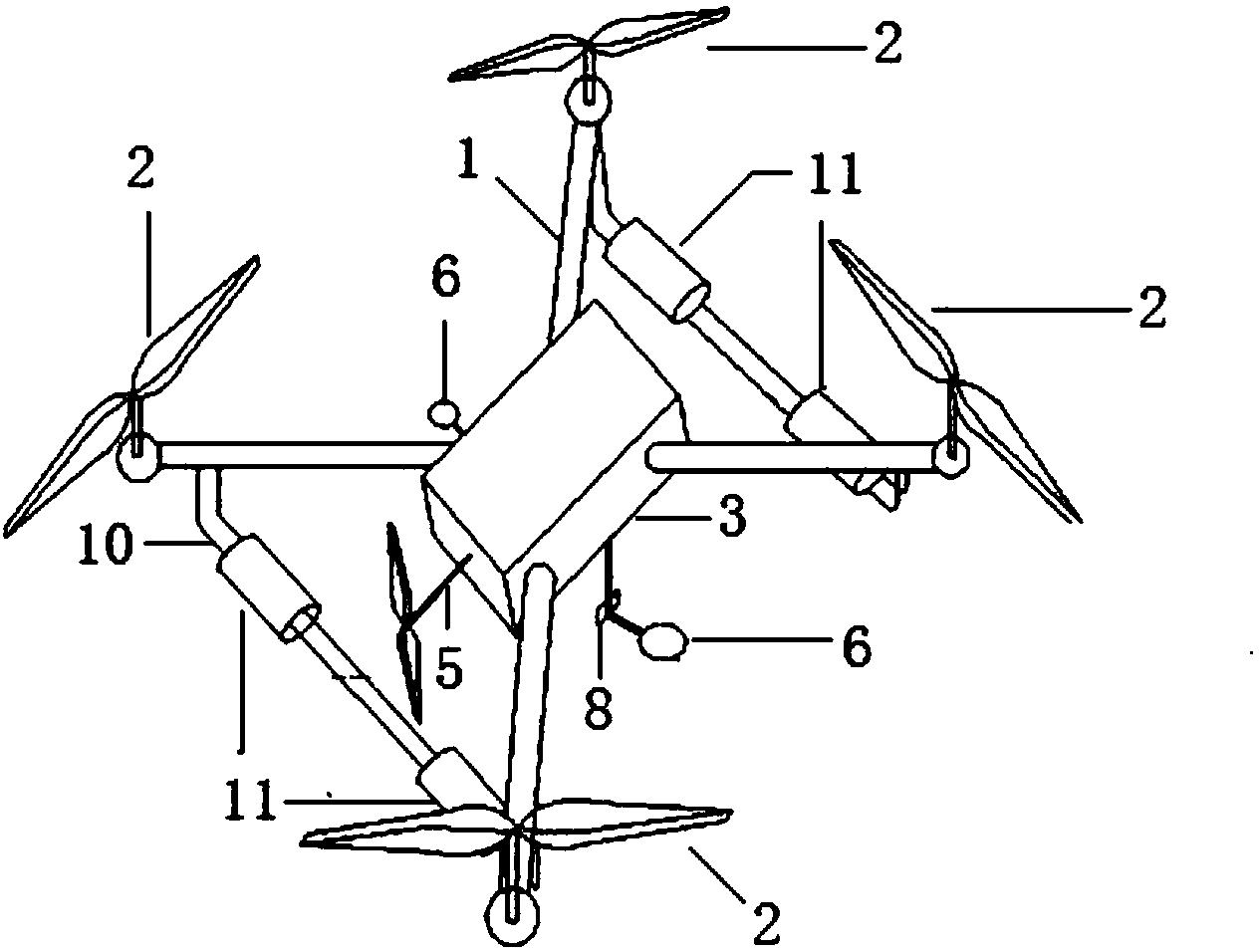
图2为本发明的涵道式低潜飞行器机体去掉上机壳的轴测图;
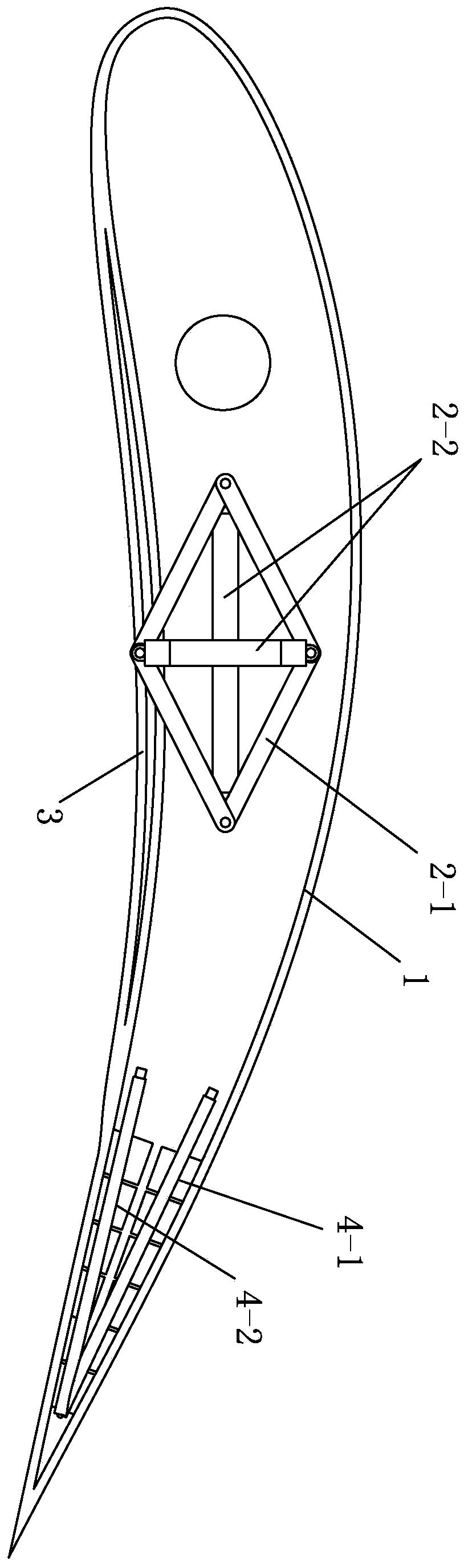
图3为本发明的涵道式低潜飞行器仰视图;
图4为本发明的涵道式低潜飞行器后视图;
图5为本发明的涵道式低潜飞行器中的方向调节器剖视图;
图6为本发明的涵道式低潜飞行器中动力调节机构简图;
图7为本发明的涵道式低潜飞行器中涵道机构轴测图;
图8为本发明的涵道式低潜飞行器中涵道机构局部剖视图;
图9为本发明的涵道式低潜飞行器中尾部推进器机构示意图;
其中:1、尾翼,2、上舱门,3、储水器,4、上机壳,5、方向调节器,501、棘轮离合器,502、行星架Ⅰ,503、轴Ⅰ,504、行星轮Ⅰ,505、离合器Ⅰ,506、外齿圈,507、锥齿轮Ⅰ,508、卡圈,509、锥齿轮Ⅱ,510、桨叶Ⅰ,511、桨毂,512、输出轴,513、导流壳,514、轴Ⅱ,515、超越离合器外圈,516、超越离合器内圈,517、轴Ⅲ,518、行星架Ⅱ,519、轴Ⅳ,520、行星轮Ⅱ,521、主动轮,522、输入轴,6、尾部推进器,601、推进电机,602、联轴器,603、轴承,60、推进桨输出轴,605、推进桨毂,606、推进桨,7、电机,8、涵道机构,801、涵道外壳,802、支撑架,803、桨叶Ⅱ,804、导流罩,805、旋转体,806、连接体,807、上传动轴,808、桨盘Ⅰ,809、锥齿轮Ⅵ,810、锥齿轮Ⅶ,811、下传动轴,812、桨盘Ⅱ,813、锥齿轮Ⅷ,9、电池组,10、电源调节器,11、电调组,12、主控制器,13、动力调节机构,1301、轴Ⅴ,1302、锥齿轮Ⅲ,1303、锥齿轮Ⅳ,1304、轴Ⅵ,1305、固定外壳,1306、锥齿轮Ⅴ,1307、轴Ⅶ,1308、离合器Ⅱ,1309、轴Ⅷ,14、中层安装板,15、储水器阀门,16、下舱门。
具体实施方式
下面结合附图对本发明的实施方式作进一步说明。
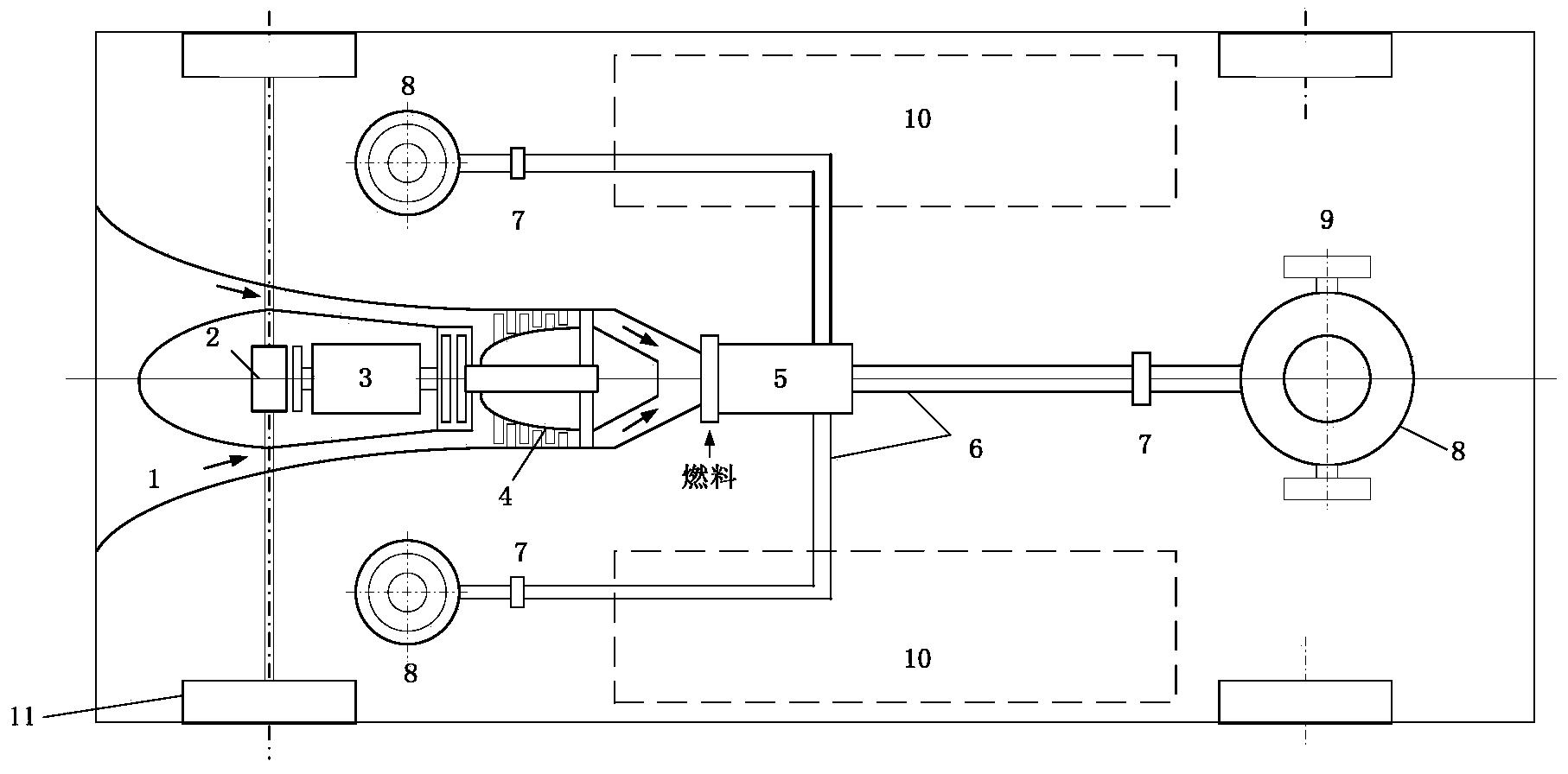
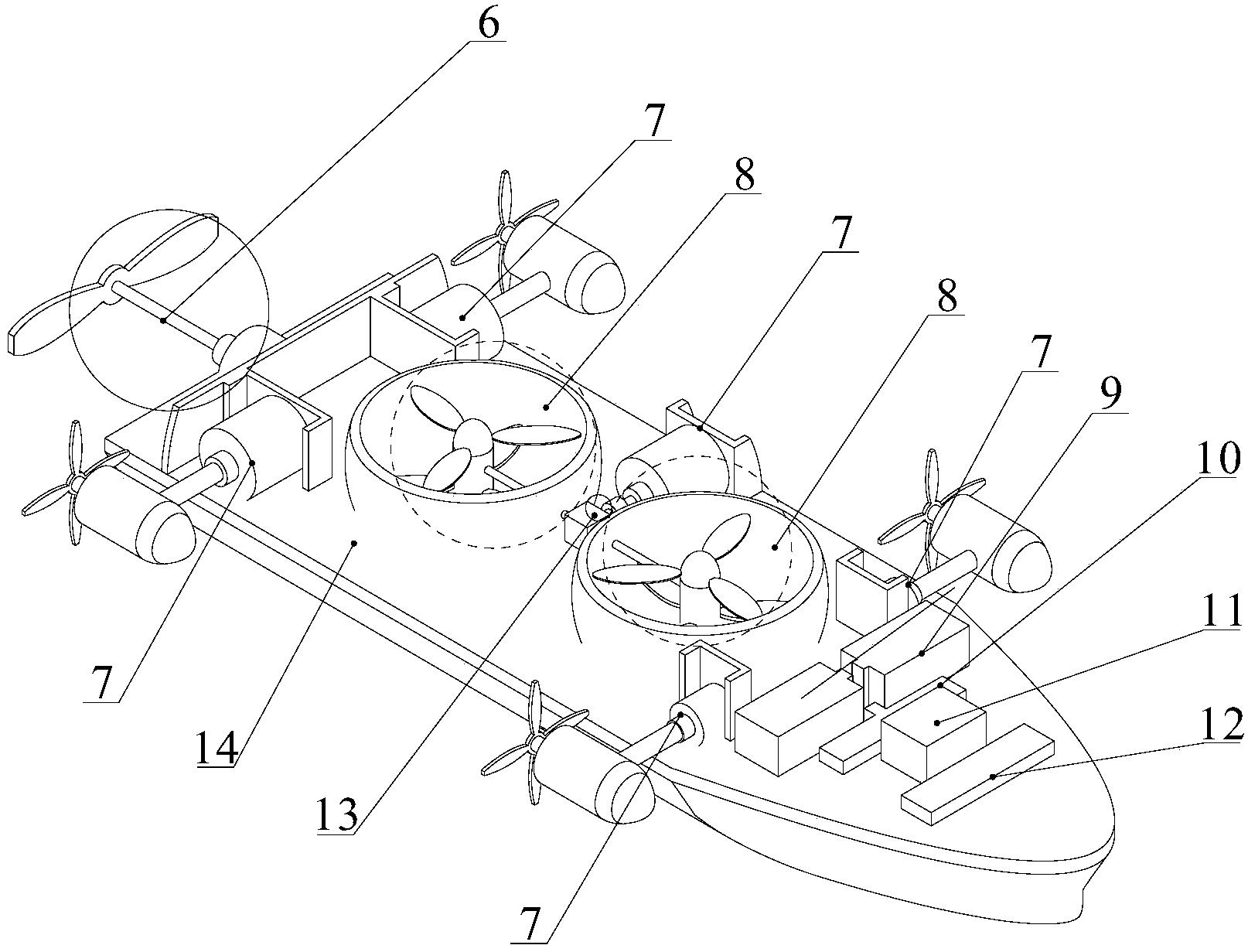
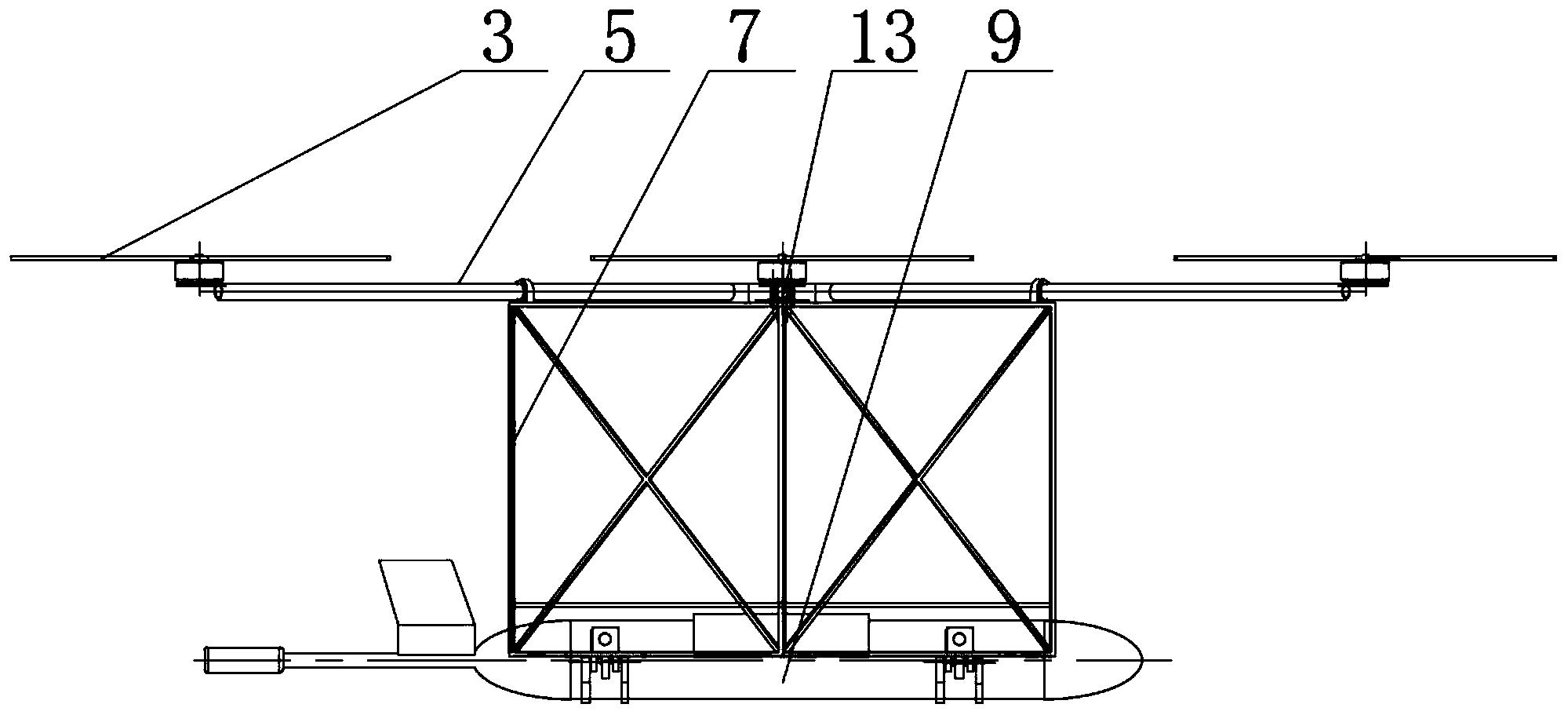
参见附图1、附图2、附图3和附图4,本发明的涵道式低潜飞行器包括:
中层安装板14,所述中层安装板14在长度方向上开有两个下舱门16;
固定设置在所述中层安装板14上部的上机壳4,所述上机壳4和所述中层安装板14之间形成腔体,所述上机壳4和所述下舱门16对应位置开有两个上舱门2,
固定设置在所述上机壳4尾部的尾翼1;
固定设置在所述中层安装板14尾部的尾部推进器6;
固定设置在所述中层安装板14侧壁的储水器3,所述储水器3上设置有储水器阀门15;储水器3是涵道式低潜飞行器在不同工况下用来调节飞行器自身重量的,储水器阀门15的开关可连接主控制器,通过主控制器进行开关控制,当飞行器降落在水面时,储水器阀门15打开,水流进入储水器3,当储水器3蓄满水时关闭,飞行器进入水下行驶阶段,当飞行器需要飞行时,方向调节器5改为向下,飞行器行驶至水面,储水器阀门15打开,水流缓慢流出,涵道机构8开始工作,飞行至空中,在靠近水面的空中停留至水完全流出后储水器阀门15关闭,储水器阀门15关闭后开始飞行;
对称设置在中层安装板14两侧的四个方向调节器5,每一个方向调节器5输入端和一个电机7连接;
设置在上机壳4和中层安装板14形成的腔体内部的两个涵道机构8,两个涵道机构8分别和所述上舱门2位置对应;
固定设置在中层安装板14上的动力调节机构13,所述动力调节机构13输入端和一个电机7连接,输出端分别和两个涵道机构8输入端连接;
以及固定设置在所述中层安装板14上的电池组9、电源调节器10、电调组11和主控制器12,电池组9通过电源线与电源调节器10连接,电源调节器10与电调组11连接,电调组11分别与每个电机7通过电线连接;主控制器12分别通过通讯线和每个电机7、电源调节器10以及电调组11连接。
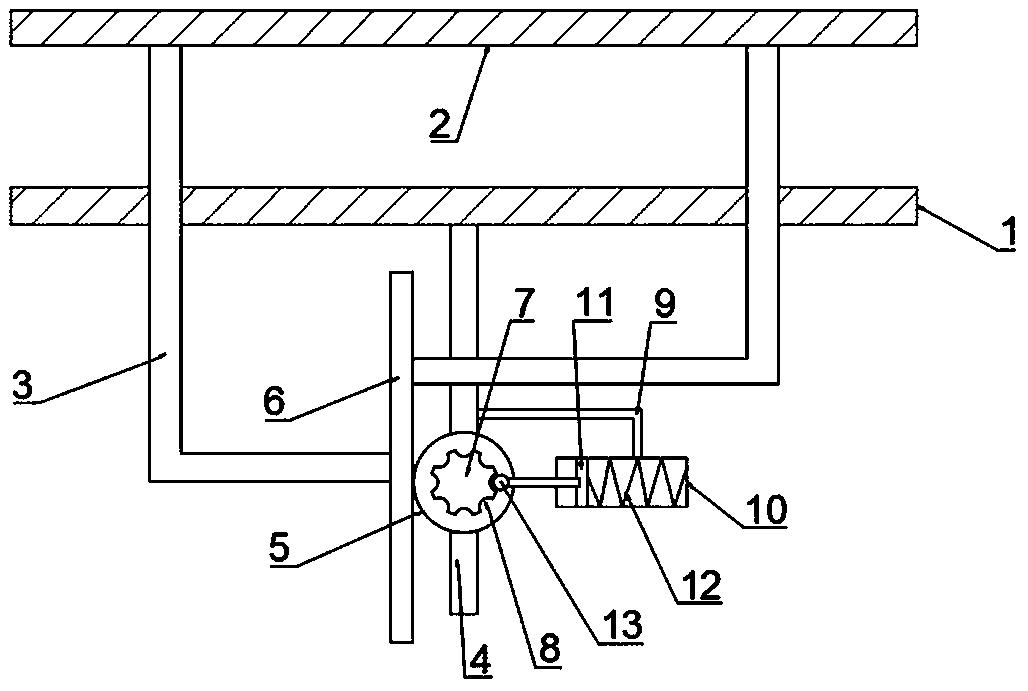
参见附图5,所述方向调节器5包括输入轴522、主动轮521、棘轮离合器501、行星架Ⅰ502、行星架Ⅱ518、轴Ⅰ503、行星轮Ⅰ504、行星轮Ⅱ520、离合器Ⅰ505、外齿圈506、轴Ⅱ514、超越离合器、轴Ⅲ517、轴Ⅳ519、锥齿轮Ⅰ507、锥齿轮Ⅱ509、桨叶Ⅰ510、桨毂511、输出轴512和导流壳513;
棘轮离合器501和行星架Ⅰ502固定连接,输入轴522穿过行星架Ⅰ502通过键和主动轮521过盈连接,输入轴522另一端和一个电机7连接;所述行星轮Ⅰ504和行星轮Ⅱ520分别和主动轮521啮合,所述轴Ⅰ503与轴Ⅳ519分别和行星轮Ⅰ504与行星轮Ⅱ520过盈连接,所述轴Ⅰ503与轴Ⅳ519的一端分别和所述行星架Ⅰ502连接,另一端分别和行星架Ⅱ518连接;所述行星轮Ⅰ504和行星轮Ⅱ520分别和外齿圈506啮合,离合器Ⅰ505与所述外齿圈506连接,所述外齿圈506和所述导流壳513固定连接;所述外齿圈506伸入导流壳513内部一端通过轴承和所述轴Ⅲ517连接,所述轴Ⅲ517一端和所述行星架Ⅱ518中心固定连接,另一端通过超越离合器和所述轴Ⅱ514一端连接,所述轴Ⅱ514和所述导流壳513内壁之间设置有轴承,所述轴Ⅱ514的另一端通过键和所述锥齿轮Ⅰ507固定连接,所述锥齿轮Ⅰ507和锥齿轮Ⅱ509啮合,所述锥齿轮Ⅱ509和所述输出轴512一端通过键固定连接,所述输出轴512的另一端伸出所述导流壳513和所述桨毂511固定连接,所述桨毂511和桨叶Ⅰ510连接,所述输出轴512和所述导流壳513之间设置有轴承,所述方向调节器5的输出轴512和所述中层安装板14的侧壁平行。所述方向调节器5可以整体绕输入轴522转动90°,方向调节器5的输出轴512在一位置时和所述中层安装板上端面平行,另一位置时和所述中层安装板14上端面垂直且指向下方。
轴Ⅲ517另一端通过超越离合器和所述轴Ⅱ514一端连接具体为:外齿圈506和超越离合器外圈515连接,轴Ⅲ517通过键和超越离合器内圈516连接,超越离合器外圈515和超越离合器内圈516连接,超越离合器外圈515通过键和轴Ⅱ514连接。
所述轴Ⅱ514和所述锥齿轮Ⅰ507连接的一端的端部设置有卡圈508,所述输出轴512和所述锥齿轮Ⅱ509连接的一端的端部设置有卡圈508。
所述行星轮Ⅰ504和行星轮Ⅱ520关于主动轮521对称设置。
参见附图6,所述动力调节机构13包括轴Ⅷ1309、离合器Ⅱ1308、轴Ⅶ1307、固定外壳1305、锥齿轮Ⅴ1306、锥齿轮Ⅲ1302、锥齿轮Ⅳ1303、轴Ⅴ1301和轴Ⅵ1304;所述轴Ⅷ1309一端和一个电机7输出轴512连接,另一端通过离合器Ⅱ1308和轴Ⅶ1307一端连接,所述轴Ⅷ1309通过轴承和所述中层安装板14连接,所述轴Ⅶ1307伸入固定外壳1305和所述锥齿轮Ⅴ1306固定连接,所述锥齿轮Ⅴ1306分别和所述锥齿轮Ⅲ1302、锥齿轮Ⅳ1303啮合,所述锥齿轮Ⅲ1302和锥齿轮Ⅳ1303分别与所述轴Ⅴ1301和轴Ⅵ1304的一端固定连接,所述轴Ⅴ1301和轴Ⅵ1304的另一端伸出所述固定外壳1305分别和一组涵道机构8连接带动涵道机构8转动,所述轴Ⅶ1307和所述固定外壳1305接触处设置有轴承。
参见附图7和附图8,所述涵道机构8包括涵道外壳801、支撑架802、桨叶Ⅱ803、导流罩804、旋转体805、连接体806、上传动轴807、桨盘Ⅰ808、下传动轴811、桨盘Ⅱ812以及设置在旋转体805内部的锥齿轮Ⅵ809、锥齿轮Ⅶ810和锥齿轮Ⅷ813;
所述涵道外壳801呈圆柱状,圆筒状旋转体805上下设置有连接体806,所述连接体806经支撑架802与所述涵道外壳801内壁固定连接;所述桨盘Ⅰ808和桨盘Ⅱ812的外圆周都均布三片桨叶Ⅱ803;
所述锥齿轮Ⅶ810分别与锥齿轮Ⅵ809和锥齿轮Ⅷ813啮合,锥齿轮Ⅵ809与上传动轴807固定连接,锥齿轮Ⅷ813与下传动轴811固定连接;所述上传动轴807的一端和所述下传动轴811的一端通过填入式滚动轴承连接,所述上传动轴807的另一端穿过所述旋转体805上部的连接体806与所述桨盘Ⅰ808固定连接,所述下传动轴811的另一端穿过所述旋转体805下部的连接体806与所述桨盘Ⅱ812固定连接,所述上传动轴807和下传动轴811通过双列角接触球轴承和所述连接体806连接,所述上传动轴807上端和所述导流罩804通过螺纹连接;
两组涵道机构8的锥齿轮Ⅶ810分别与轴Ⅴ1301和轴Ⅵ1304固定连接,轴Ⅴ1301和轴Ⅵ1304分别与一个双列角接触球轴承过盈配合,涵道机构8的涵道外壳801固结在中层安装板上。
参见附图9,所述尾部推进器6包括推进电机601、联轴器602、轴承603、推进桨输出轴604、推进桨毂605和推进桨606;所述推进电机601固结在中层安装板14,通过联轴器602和推进桨输出轴604连接,推进桨输出轴604和轴承603连接,轴承603外壳固结在中层安装板14上,推进桨输出轴604通过推进桨毂605和推进桨606连接。
本发明的方向调节器5的工作原理为:
1、正常提供动力时:电机7正常运转,离合器Ⅰ505加紧外齿圈506使其不能转动,棘轮离合器501能够转动,输入轴522带动行星轮Ⅰ504和行星轮Ⅱ520围绕主动轮521(49)旋转,带动轴Ⅲ517旋转,此时超越离合器外圈515和超越离合器内圈516接触,带动轴Ⅱ514旋转,通过锥齿轮Ⅰ507和锥齿轮Ⅱ509相互啮合,最终带动桨叶Ⅰ510旋转提供动力。
2、改变运行方向时:使电机7反转,离合器Ⅰ505松开外齿圈506使其可以旋转,此时棘轮离合器501不能旋转,行星轮Ⅰ504和行星轮Ⅱ520固定,输入轴522带动主动轮521旋转,行星轮Ⅰ504和行星轮Ⅱ520分别绕轴Ⅰ503和轴Ⅳ519旋转,带动外齿圈506旋转,超越离合器外圈515和超越离合器内圈516不接触,从而使导流壳513在二维平面内进行旋转,实现方向调节的目的。
涵道式低潜飞行器专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
















动态评分
0.0