











专利摘要
本发明公开了一种机器人车体均匀着地装置,其左右对称的驱动轮单元分别包括驱动轮、驱动轮支架、安装在电机上的编码器、安装在一起的减速器和电机;自平衡随动轮单元包括减震器上、下支架、均左右对称的减震器和随动轮、平衡梁、两个平衡梁支架、轴承组件;减速器固定安装在驱动轮支架上,驱动轮固定在减速器输出轴上,驱动轮支架固定于底板上;两个随动轮安装于平衡梁的两端,减震器的两端与减震器上、下支架活动联接,减震器上、下支架对应固定于底板和平衡梁的端部,轴承组件置于平衡梁中部,两个平衡梁支架分别与固定于底板上的轴承组件和平衡梁联接。本发明解决了传统机器人车体载重能力差和易倾覆的问题,保证轮子均匀着地。
说明书
技术领域技术领域
本发明属于机器人领域,涉及一种机器人车体的均匀着地装置。
技术背景背景技术
采用两轮差速驱动机构的轮式移动机器人一般有两个驱动轮和一个随动轮组成,这种三轮着地方式结构简单,由于“三点共面”原理,三个轮子都能够均匀的着地;但采用这种机构的机器人车体有载重能力差和容易倾覆的缺点。如果将随动轮数增加为两个,机器人前部两侧安装两个驱动轮,后部两侧安装两个随动轮,则载重能力和稳定性会得到显著改善;但必须解决四个轮子无法均匀着地的问题,否则由于安装偏差和路面不平等因素发生轮子悬空的现象,会影响车体的稳定性和控制的准确性。中国专利CN101117086公开了一种采用分层、二级减震机构来的机器人车体悬挂系统,但它没考虑弹簧引起的振动,车体载重能力有限。
发明内容发明内容
本发明的目的是提供一种机器人车体均匀着地装置,解决了传统三轮着地布置的机器人车体载重能力差和容易倾覆的问题,同时保证轮子均匀着地,改善了机器人车体的载重能力和稳定性。
为实现本发明目的,本发明所采取的技术方案是:该机器人车体均匀着地装置主要包括底板、两个左右对称的驱动轮单元和自平衡随动轮单元;所述驱动轮单元包括驱动轮、驱动轮支架、减速器、电机、编码器;自平衡随动轮单元包括减震器上支架、两个左右对称的减震器、减震器下支架、两个左右对称的随动轮、平衡梁、第一平衡梁支架、第二平衡梁支架、轴承组件;所述电机与减速器安装在一起,电机上安装有编码器,减速器固定安装在驱动轮支架上,驱动轮固定在减速器输出轴上,驱动轮支架固定于底板上;所述两个随动轮分别安装于平衡梁的两端,所述减震器的一端与减震器上支架活动联接,减震器的另一端与减震器下支架活动联接,减震器上支架固定于底板上,减震器下支架固定于平衡梁的端部,所述轴承组件置于平衡梁的中部,第一平衡梁支架和第二平衡梁支架与轴承组件联接,第一平衡梁支架和第二平衡梁支架与平衡梁固定联接,轴承组件固定于底板上。
进一步地,本发明所述减速器输出轴上安装有圆锥滚子轴承。
进一步地,本发明所述减速器输出轴通过胀紧联接套与驱动轮的轮毂联接。
与现有技术相比,本发明的有益效果:
(1)车体安装有四个轮子,与传统的三轮机器人车体相比,改善了机器人车体的载重能力和稳定性。
(2)驱动轮单元中减速器输出轴通过胀紧联接套与轮毂联接,传动方式简单,结构紧凑,装拆方便。
(3)驱动轮单元中减速器输出轴部分安装有一对圆锥滚子轴承,能够承受很大的径向力和轴向力,提高了机器人车体的载重能力。
(4)随动轮单元中两个随动轮对称的安装在平衡梁上,平衡梁机构利用自平衡原理保证四个轮子均匀着地,保证了控制的准确性,减震器能够吸收地面对车体造成的振动,整个机构结构简单、实施成本低。
附图说明附图说明
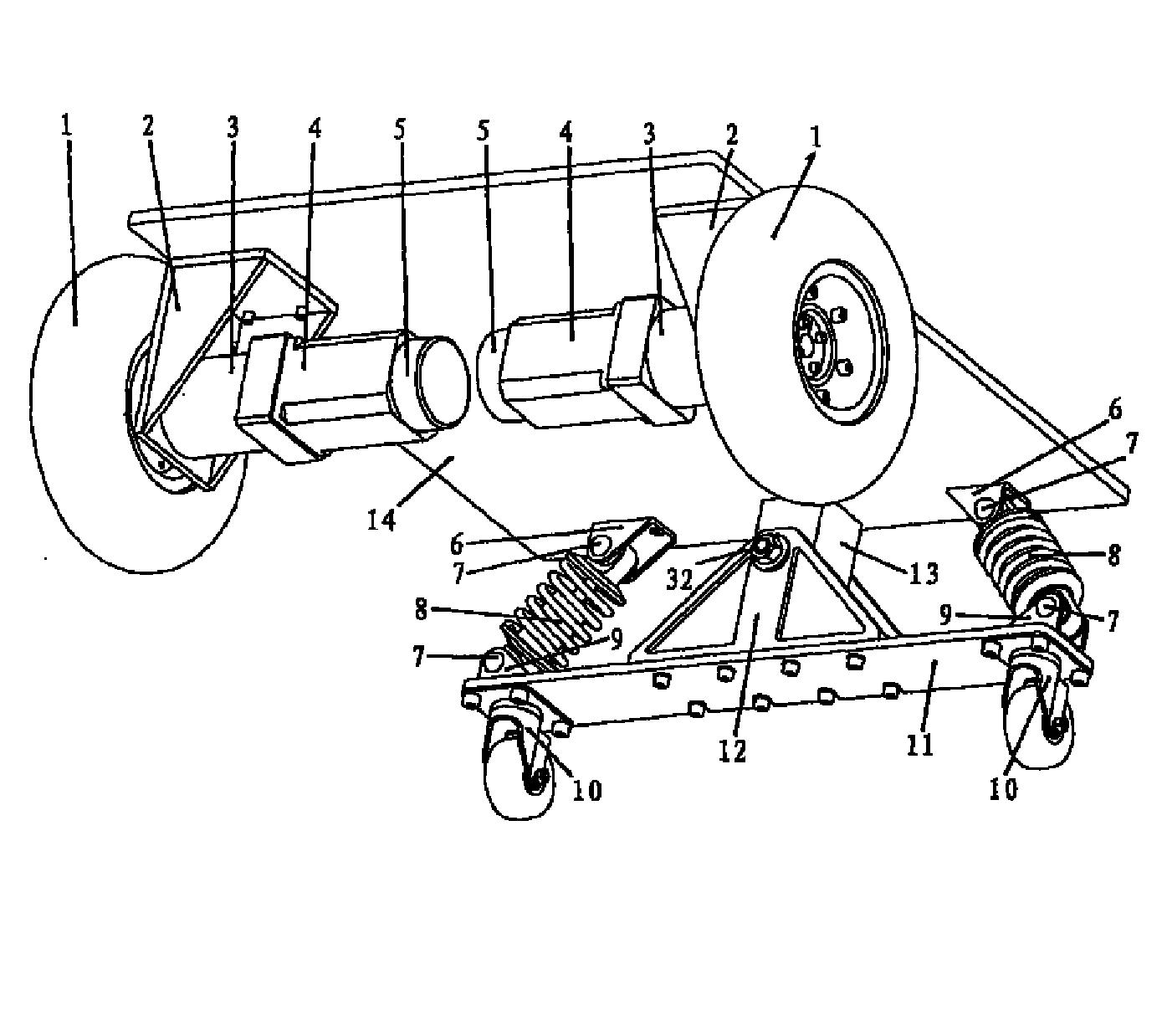
图1是机器人车体均匀着地装置结构示意图;
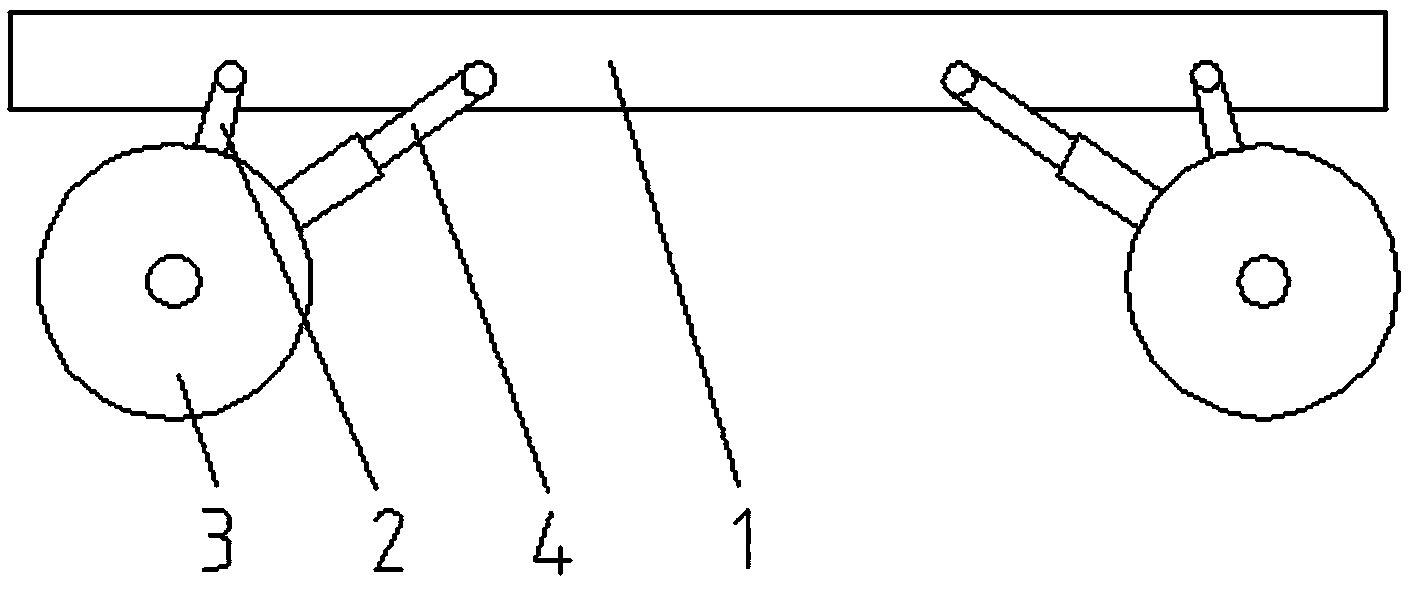
图2是驱动轮单元结构示意图;
图3是自平衡随动轮单元结构示意图;
图4是平衡梁支架联接示意图;
图中,1.驱动轮,2.驱动轮支架,3.减速器,4.电机,5.编码器,6.减震器上支架,7.销轴,8.减震器,9.减震器下支架,10.随动轮,11.平衡梁,12.第一平衡梁支架,13.轴承组件,14.底板,15.第二平衡梁支架,16.外轮辋,17.轮胎,18.内轮辋,19.轮毂,20.胀紧联接套,21.减速器输出轴,22.轴承,23.阻尼器,24.弹簧,25.铰链销,26.轴承座,27.第二角接触球轴承,28.调整环,29.弹簧垫片,30.平垫片,31.预紧环,32.螺母,33.第一角接触球轴承。
具体实施方式具体实施方式
以下结合附图进一步说明本发明。
参照图1-4,本发明的机器人车体均匀着地装置主要包括驱动轮单元和自平衡随动轮单元。驱动轮单元中电机4与减速器3联接,电机4上安装有编码器5,用于反馈电机的转速,实现闭环控制,减速器3通过螺钉固定在驱动轮支架2上。驱动轮1中的轮胎17由外轮辋16、内轮辋18、通过螺钉夹紧并固定于轮毂19;驱动轮1的轮毂19通过胀紧联接套20与减速器输出轴21联接,拧紧或拧松胀紧联接套20上的安装螺钉即可装拆驱动轮1,便于装配和维修;减速器输出轴21上装有一对圆锥滚子轴承22,使得减速器输出轴21能够承受很大的径向力和轴向力,提高了机器人车体的载重能力;两个左右对称的驱动轮单元通过驱动轮支架2固定在底板14上,实现两轮差动驱动,具有转向灵活、定位准确的优点。自平衡随动轮单元中两个左右对称的随动轮10是一种万向轮,通过螺钉安装于平衡梁11的两端,两个左右对称的减震器8的一端通过销轴7与减震器上支架6联接,减震器8的另一端通过销轴7与减震器下支架9联接,减震器8两端可绕销轴7转动,减震器上支架6通过螺钉固定于底板14,减震器下支架9焊接于平衡梁11两端,减震器8由阻尼器23和弹簧24组成,两者共同作用能够吸收地面对车体造成的振动;第一平衡梁支架12、第二平衡梁支架15通过螺钉与平衡梁11固定在一起,第一平衡梁支架12、第二平衡梁支架15通过铰链销25与轴承组件13联接,铰链销25的头部与第二平衡梁支架15之间装有弹簧垫片29、平垫片30,第二平衡梁支架15通过一个调整环28与第二角接触球轴承27的内圈接触,第一平衡梁支架12通过一个调整环28与第一角接触球轴承33的内圈接触,螺母32与第一平衡梁支架12之间装有一个平垫片30,第一角接触球轴承33、第二角接触球轴承27的外圈与轴承座26采用间隙配合,预紧环31两端分别与第一角接触球轴承33、第二角接触球轴承27的内圈接触,预紧环31的外圈与轴承座26间隙配合,内孔与铰链销25不接触,使用预紧环31的目的是使两个角接触球轴承共同承受轴向力,拧紧螺母32后,第一平衡梁支架12、第二平衡梁支架15与铰链销25固定,第一平衡梁支架12、第二平衡梁支架15可绕轴承组件13的轴线转动,轴承组件13置于平衡梁11的中部,使得平衡梁11的两端可根据地面高低自动进行位置调整。轴承组件13通过螺钉固定在底板14上;底板14由两个的驱动轮1和两个随动轮10共同支撑,改善了机器人车体的稳定性。
一种机器人车体均匀着地装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。



动态评分
0.0