







专利摘要
本实用新型的一种高地隙植保机远程遥控辅助驾驶系统,属于植保机技术领域,包括底盘、转向闭环控制系统和速度闭环控制系统,转向闭环控制系统和速度闭环控制系统安装于底盘上,转向闭环控制系统控制底盘的转向角度,速度闭环控制系统控制底盘的行走速度,底盘前方安装的工业相机实时获取前方环境信息,通过对转角的数学模型计算出底盘行走的预测轨迹,并将预测轨迹实时加载到工业相机获取的环境视频内形成辅助视频信息,底盘上设有网桥B,网桥B与外界网桥A无线连接,网桥A通过交换机与PC主板连接形成远距离辅助视频信息及反馈指令高速传播,本实用新型的一种高地隙植保机远程遥控辅助驾驶系统能够实时获取环境信息并预加载行走轨迹,具有远程精确操作,作业安全高,植保效率高效果好的优点。
权利要求
1.一种高地隙植保机远程遥控辅助驾驶系统,其特征在于:包括底盘(100)、转向闭环控制系统(200)和速度闭环控制系统(300),所述转向闭环控制系统(200)和速度闭环控制系统(300)安装于底盘(100)上,所述转向闭环控制系统(200)包括控制器(210)、伺服电机一(220)、全液压转向器(230)、转向油缸(240)和位移传感器(250),所述伺服电机驱动全液压转向器(230),所述全液压转向器(230)与转向油缸(240)连接,所述全液压转向器(230)控制转向油缸(240)的位移量,所述位移传感器(250)与转向油缸(240)连接并检测转向油缸(240)的位移量,所述位移传感器(250)与控制请电性连接;所述速度闭环控制系统(300)包括软轴(310)、变量泵(320)、扇形齿轮(330)、伺服电机二(340)和转速传感器(350),所述变量泵(320)和扇形齿轮(330)之间采用软轴(310)连接,所述伺服电机二(340)与变量泵(320)转动连接,所述转速传感器(350)与控制器(210)电性连接,所述底盘(100)上设有网桥B(410),所述网桥B(410)与控制器(210)电性连接,所述网桥B(410)与外界网桥A(400)无线连接,所述网桥A(400)通过交换机与PC主板连接。
2.根据权利要求1所述的一种高地隙植保机远程遥控辅助驾驶系统,其特征在于:所述转向闭环控制系统(200)控制前轮转向,所述前轮前方安装工业相机(260),所述速度闭环控制系统(300)控制后轮(510)转速。
说明书
技术领域
本实用新型属于植保机领域,更具体来说,涉及一种高地隙植保机远程遥控辅助驾驶系统。
背景技术
高地隙底盘主要用于田间植保,驾驶员操纵高地隙植保机田间农药喷雾作业,由于农药雾滴飘移,驾驶员身体易受到农药化学物质损伤,甚至发生中毒事故。此外,驾驶员长时间暴露在田间恶劣环境中,也容易过早疲劳,严重影响驾驶员的身心健康。远程控制技术可以实现远距离的机器作业控制,已在军事、工业、医疗等领域广泛应用。将远程控制技术与农业生产结合,实现人-机-环分离生产作业,有效降低操作者劳动强度,提高作业安全性。目前遥控操作技术在农业领域已有一些应用,但是针对高地隙底盘田间对行行走的遥控驾驶研究较少,且缺乏遥控驾驶辅助方面的研究。由于高地隙底盘离地间隙普遍超过1m,田间作业存在极大的侧翻隐患,同时驾驶员体重也增加了底盘的负载,因此有必要开展高地隙底盘的遥控驾驶技术研究。
经检索,发明创造的名称为:一种植保无人机系统(申请号:201810430134.5,申请公布日:2018.10.09)。该申请案公开了一种植保机用无人驾驶系统,可以在不需要驾驶员的条件下进行植保机作业,一定程度上解决了当前植保机需要额外配置驾驶员带来的危害,但是该系统的反馈与控制不够完善,同时该系统无法实时加载行走轨迹,不利于植保机田间对行行走操纵,导致远程操作不够准确,操纵效率较低,进而产生压苗现象。
实用新型内容
1.实用新型要解决的技术问题
本实用新型的目的在于解决现有技术中对于田间作业时,驾驶员容易发生农药中毒或者疲劳操作的现象,损害驾驶员身心健康,提供一种高地隙植保机远程遥控辅助驾驶系统,能够实时获取环境信息并预加载行走轨迹,具有远程精确操作,作业安全高,植保效率高效果好的优点。
2.技术方案
为达到上述目的,本实用新型提供的技术方案为:
本实用新型的一种高地隙植保机远程遥控辅助驾驶系统,包括底盘、转向闭环控制系统和速度闭环控制系统,转向闭环控制系统和速度闭环控制系统安装于底盘上,转向闭环控制系统包括控制器、伺服电机一、全液压转向器、转向油缸和位移传感器,伺服电机驱动全液压转向器,全液压转向器与转向油缸连接,全液压转向器控制转向油缸的位移量,位移传感器与转向油缸连接并检测转向油缸的位移量,位移传感器与控制请电性连接;速度闭环控制系统包括软轴、变量泵、扇形齿轮、伺服电机二和转速传感器,变量泵和扇形齿轮之间采用软轴连接,伺服电机二与变量泵转动连接,所述转速传感器与控制器电性连接,底盘上设有网桥B,网桥B与控制器电性连接,网桥B与外界网桥A无线连接,网桥A通过交换机与 PC主板连接。
优选的,转向闭环控制系统控制前轮转向,前轮前方安装工业相机,速度闭环控制系统控制后轮转速。
3.有益效果
采用本实用新型提供的技术方案,与现有技术相比,具有如下有益效果:
(1)本实用新型的一种高地隙植保机远程遥控辅助驾驶系统,包括底盘、转向闭环控制系统和速度闭环控制系统,转向闭环控制系统和速度闭环控制系统安装于底盘上,转向闭环控制系统包括控制器、伺服电机一、全液压转向器、转向油缸和位移传感器,伺服电机驱动全液压转向器,全液压转向器与转向油缸连接,全液压转向器控制转向油缸的位移量,位移传感器与转向油缸连接并检测转向油缸的位移量,位移传感器与控制请电性连接;速度闭环控制系统包括软轴、变量泵、扇形齿轮、伺服电机二和转速传感器,变量泵和扇形齿轮之间采用软轴连接,伺服电机二与变量泵转动连接,所述转速传感器与控制器电性连接,底盘上设有网桥B,网桥B与控制器电性连接,网桥B与外界网桥A无线连接,网桥A通过交换机与PC主板连接,本实用新型的辅助驾驶系统,实现了对于植保机的远距离控制,解决了传统植保机需要操作人员的缺陷,提高了作业的安全性,同时进一步降低了底盘的负载,提高效率。
(2)本实用新型的一种高地隙植保机远程遥控辅助驾驶系统,转向闭环控制系统控制前轮转向,前轮前方安装工业相机,速度闭环控制系统控制后轮转速,此设计,通过工业相机实时获取底盘前方信息,使得远程操控能够及时变更与调整。
附图说明
图1为本实用新型的一种高地隙植保机远程遥控辅助驾驶系统的结构示意图;
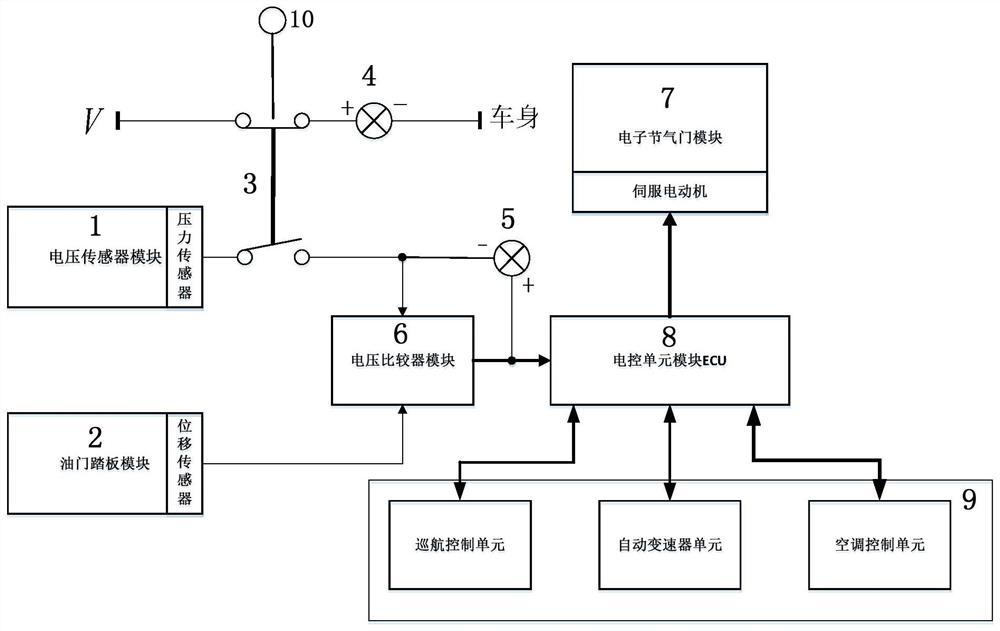
图2为本实用新型的一种高地隙植保机远程遥控辅助驾驶系统的总体设计框架图
图3为本实用新型的一种高地隙植保机远程遥控辅助驾驶系统的转向闭环控制系统框图;
图4为本实用新型的一种高地隙植保机远程遥控辅助驾驶系统的转向闭环控制系统结构示意图;
图5为本实用新型的一种高地隙植保机远程遥控辅助驾驶系统的速度闭环控制系统框图;
图6为本实用新型的一种高地隙植保机远程遥控辅助驾驶系统的速度闭环控制系统结构示意图;
图7为本实用新型的一种高地隙植保机远程遥控辅助驾驶系统的底盘运动学模型图;
图8为本实用新型的一种高地隙植保机远程遥控辅助驾驶系统的指令信号传流程图。
示意图中的标号说明:
100、底盘;
200、转向闭环控制系统;210、控制器;220、伺服电机一;230、全液压转向器;240、转向油缸;250、位移传感器;260、工业相机;
300、速度闭环控制系统;310、软轴;320、变量泵;330、扇形齿轮;340、伺服电机二;350、转速传感器;
400、网桥A;410、网桥B;
500、前轮;510、后轮。
具体实施方式
为了便于理解本实用新型,下面将参照相关附图对本实用新型进行更全面的描述,附图中给出了本实用新型的若干实施例,但是,本实用新型可以以许多不同的形式来实现,并不限于本文所描述的实施例,相反地,提供这些实施例的目的是使对本实用新型的公开内容更加透彻全面。
需要说明的是,当元件被称为“固设于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件;当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件;本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同;本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本实用新型;本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
实施例1
参照附图1、图2、图3、图4、图5和图6所示,本实施例的一种高地隙植保机远程遥控辅助驾驶系统,包括底盘100、转向闭环控制系统200和速度闭环控制系统300,转向闭环控制系统200和速度闭环控制系统300安装于底盘100上,转向闭环控制系统200包括控制器210、伺服电机一220、全液压转向器230、转向油缸240和位移传感器250,伺服电机驱动全液压转向器230,全液压转向器230与转向油缸240连接,全液压转向器230控制转向油缸240的位移量,位移传感器250与转向油缸240连接并检测转向油缸240的位移量,位移传感器250与控制请电性连接;速度闭环控制系统300包括软轴310、变量泵320、扇形齿轮330、伺服电机二340和转速传感器350,变量泵320和扇形齿轮330之间采用软轴310连接,伺服电机二340与变量泵320转动连接,所述转速传感器350与控制器210电性连接,底盘100上设有网桥B410,网桥B410与控制器210电性连接,网桥B410与外界网桥A400 无线连接,网桥A400通过交换机与PC主板连接,如果不采用本设计的植保机而采用传统植保机进行作业,需要在植保机上配备驾驶员,长期作用使得驾驶员劳累,导致工作效率不高,同时在喷洒农药时会引发驾驶员中毒,有生命危险,而采用了本设计的植保机,远程遥控驾驶,安全可靠,不需要驾驶员,避免上述危险。
本实施例的转向闭环控制系统200控制前轮500转向,前轮500前方安装工业相机260,速度闭环控制系统300控制后轮510转速,如果不安装工业相机260,在遇到特殊情况时,远程操作人员无法及时更改植保机的工作线路,危险性高,而安装了工业相机260,远程操作人员通过工业相机260及时获取植保机的工作环境与工作线路,遇到需要调整时,可及时发现并调整,方便操作。
本实用新型利用高地隙远程操控辅助驾驶系统总体设计框架,对于通信模块,遥控操作端通过一对网桥实现指令和视频传输,并在用户界面上显示,操作者根据视频信息和预测轨迹感知高地隙底盘100田间工作环境,进而给出转向和行走速度控制指令;对于自动转向系统,主要是在原有转向系统基础上并联全液压转向器230,通过伺服电机控制全液压转向器 230工作,实现底盘100根据操控者发出指令自动转向;对于自动行走系统,柴机油通过皮带与静液压驱动器(HST)连接,通过电机控制柱塞泵倾斜角度实现底盘100前进/后退以及车速控制。
为实现上述意图,本实用新型提供的转向控制系统实施例结构如图二所示,该实例包括由伺服电机驱动装置、全液压转向器230、转向油缸240、控制器210构成的控制单元;以及直线位移传感器250构成的转向测量单元;各器件的连接关系为:直线位移传感器250的输出端经过滤波和轮胎转角变换与控制器210的输入端相连,经过控制器210的带死区的变速积分PID控制算法判断控制伺服电机,伺服电机与全液压转向装置相连,全液压转向阀与转向油缸240相连,转向油缸240与直线位移传感器250相连构成闭环系统。底盘100自动转向系统采用上述算法设计控制器210,控制参数:kp=100、ki=0.1、kd=0.01;A=0.4、B=0.6;ξ0=0.05,给定车轮目标转角10°的阶跃信号,控制效果如图4所示,平均超调量小于14%,峰值响应时间小于1s。
本实用新型采用的带死区的变速积分PID控制算法说明:当转向系统长时间维持转向轮中位时,由于测试噪声、轮胎阻力、液压等众多影响因素干扰,伺服电机一220会始终保持频繁工作,严重情况下甚至导致电机堵转,自动转向系统丧失转向功能。自动转向系统既需要有效减小超调量、缩短系统稳定时间,又要避免控制过于频繁,消除由于频繁动作引起的振荡,因此提出采用带死区的变速积分PID控制算法。采用带死区的变速积分PID控制算法的数学描述如式所示:
式中,e(k)和e(k-1)分别为第k-1次和第k次时刻所得的偏差信号;k为采样序号(k=1,2,3,…);T为采样时间;kp、ki、kd分别为比例系数、积分系数和微分系数;f[e(k)] 为变速积分系数,根据公式(2)确定;β为死区调节系数,根据公式(3)确定。
变积分PID算法的基本思想是通过改变积分项的累加速度,系统偏差大时积分作用应减小,降低超调量;系统偏差小时,增大积分作用,消除静差。
基于此设定变速积分系数f[e(k)],数学描述:
式中,f[e(k)]在[0,1]区间范围内变化,由A和B值确定分离区间。当|e(k)|大于分离点A+B 时,f[e(k)]=0,不再对当前值e(k)进行累加;当|e(k)|小于所给分离点B时,此时f[e(k)]=1,完全加入积分作用,此时积分项变为 积分动作速度最快;当|e(k)|介于分离点B 和A+B时,积分速度在 和 该算法对A、B参数要求不精确,参数整定较容易。
在控制器210中添加死区控制可以避免伺服电机频繁动作,控制算法数学描述:
式中,e(k)为第k次时刻所得的偏差信号;ξ0为可调参数,具体值由实验确定。
本实用新型提供的转向控制系统各器件的传递关系为:伺服电机一220通过联轴器与全液压转向器230连接,伺服电机一220驱动全液压转向器230,全液压转向器230控制转向油缸240,进而转向油缸240驱动车轮实现高地隙植保机的转向。
本实用新型提供的行驶速度控制系统实施例结构如图5所示,各器件的传递关系为:遥控信号控制油门,油门控制发动机输出功率,发动机控制静液压驱动器将机械能转化为液压能再转化为机械能,进而通过变速箱和分动器以及车桥传递到车轮,通过车轮上的转速传感器350将实际车速与遥控信号指定的目标车速由行走伺服控制器210比较,最后通过行走伺服控制执行机构控制变量泵320流量进而控制车速。通过在高地隙底盘100车轮安装的转速传感器350,获取底盘100行走速度,作为速度行走伺服控制器210的反馈输入,采用PD控制方法实现车速的闭环控制。采用本文设计的底盘100行驶速度控制方案,平均控制误差为 0.022m/s,能够满足高地隙底盘100田间行走速度控制精度要求。
上述的行走伺服控制执行机构设计方案如图6所示说明:通过软轴310连接变量泵320 倾斜角调节杆和扇形齿轮330,伺服电机二340控制扇形齿轮330,进而带动软轴310改变变量泵320的柱塞倾斜角实现伺服电机二340控制变量泵320流量。
本实用新型提供的基于机器视觉的底盘100行走轨迹预测获取算法如图6所示,由于高地隙底盘100田间作业速度较小,运动学模型能够满足高地隙底盘100行走轨迹预测精度要求,OL和OR分别为前轮500和后轮510的轴线交点,称为转向瞬心,根据阿克曼原理确定底盘100瞬心位置及其转弯半径为:
式中:L为高地隙底盘100的轴距,γ为车轮转向角度,车轮转角由转向油缸240拉线传感器间接测量得到,Ll和Lr分别为底盘100左后轮510、右后轮510与旋转瞬心的距离。
根据高地隙底盘100转弯半径和转向瞬心位置,建立底盘100行驶轨迹预测模型如下式。高地隙底盘100行走轨迹只与轴距L、转向角γ有关,当轴距确定后,高地隙底盘100行走轨迹只与前轮500转向角有关。
式中:xL和yL分别为左前轮500行走轨迹坐标点;xR和yR分别为左前轮500行走轨迹坐标点;L≤yL≤2L和L≤yR≤2L表示预测轨迹在图像中显示范围。
本实用新型的一种高地隙植保机远程遥控辅助驾驶系统,由于高地隙底盘100田间作业速度较小,运动学模型能够满足高地隙底盘100行走轨迹预测精度要求。在车轮正前方安装工业相机260,采用机器视觉实时采集与处理模块获取田间作业视频,提取视频对象所有帧,对每一帧图片添加高地隙底盘100行走轨迹预测线,最后逐帧保存并生成视频。
本实用新型的一种高地隙植保机远程遥控辅助驾驶系统的通信模块的实施例结构如图8 所示,高地隙底盘100遥控操纵信号数据传输采用奥维通无线网桥作为传输工具,信号波段为2.4GHZ,由于频段较低,信号在传输的过程中能够绕开障碍物,数据不易丢失,数据速率为11Mbs,信号理论传输距离为50Km。高地隙底盘100通过一对网桥构成的局域网实现信号传输,其中网桥A400为遥控操作端网桥,与遥控控制箱网口连接,用于接受高地隙底盘 100状态信息,并发出操纵者指令信号。网桥B410安装在高地隙底盘100上,与工控机上的网口连接,接收网桥A400发出的动作指令,并发出高地隙底盘100作业环境视频信息,以及底盘100行走状态信号。遥控操作端,网桥A400接收通信信息,通过交换机(将视频信息回传到PC主板上,根据转向轮转向角度生成行走轨迹预测线,最终显示在显示屏上。操纵者根据显示屏中的信息,发出高地隙底盘100运动指令,通过交换机发送到网桥A400,通过无线网络传输到安装在高地隙底盘100上的网桥B410。网桥B410接受到网桥A400信号后,通过交换机将底盘100运动指令发送到微控制器210网口,微控制器210接收指令后,控制高地隙底盘100转向、车速以及发动机启动和停止。同时,安装在高地隙底盘100上的摄像机通过交换机和网桥将图像信息传输到操作端。
本实用新型的遥控操作系统人机交互设计实施例结构具有良好的人机交互设计有利于提高高地隙底盘100田间工作效率和减少轮胎压苗。遥操系统人机交互界面如图所示,主要包括底盘100前方视频信息、底盘100行走预测轨迹、底盘100转向系统状态参数、底盘100 行走速度状态参数、底盘100位置姿态参数等;本实用新型专利设计遥操系统人机交互界面,如图所示,主要有底盘100运动状态信息区、视频区与操作区组成。操纵者通过安装在底盘 100正前方的工业相机260获取底盘100前方视频信息,可以对底盘100在田间的大致位置及其运动状态进行评价,在车轮正前方安装工业相机260获取车轮前方视频信息,可以保证车轮在苗带行间行走少压苗。通过底盘100车轮转向实时采集,建立车轮行走轨迹预测轨迹,有利于提高操作者遥控驾驶效率和减少压苗。驾驶员通过底盘100速度、车轮转角和发动机转速信息综合评价底盘100的运动状态,然后对底盘100速度进行控制
以上所述实施例仅表达了本实用新型的某种实施方式,其描述较为具体和详细,但并不能因此而理解为对本实用新型专利范围的限制;应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围;因此,本实用新型专利的保护范围应以所附权利要求为准。
一种高地隙植保机远程遥控辅助驾驶系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
















动态评分
0.0