







专利摘要
本实用新型公开了一种主动防倒车碰撞的辅助制动装置,包含毫米级雷达探测器、轮速传感器、车载ECU、GPS定位模块、显示屏、语音提示模块、制动电机和辅助制动器;辅助制动器对车辆进行辅助制动;制动电机驱动所述辅助制动器工作。毫米级雷达探测器能够有效地解决传统探 测器的盲区过大的弊端,显示屏与语音提示模块可以通过图像和声音提醒驾驶员注意后方障碍物。本实用新型能够防止驾驶员进行倒车时由于不能很好地观测行车后方的障碍物状况及其运动状态不能及时的做出相应反应而发生的碰撞问题。
权利要求
1.一种主动防倒车碰撞的辅助制动装置,其特征在于,包含毫米级雷达探测器、轮速传感器、车载ECU、GPS定位模块、显示屏、语音提示模块、制动电机和辅助制动器;
其特征在于:所述车载ECU分别与车辆传感器和GPS定位系统的信号输出端相连、与中控显示屏及辅助制动装置的输入端相连;所述语音提示系统与中控显示屏电性相连;
所述车辆传感器所述毫米级雷达探测器设置在车辆尾部,用于感应车辆后方障碍相对于车辆的距离和速度,并将其传递给所述车载ECU;
所述轮速传感器设置在车辆的一个后轮上,用于测量车辆的速度和车辆的方向,并将其传递给所述车载ECU;
所述GPS定位模块用于检测车辆的GPS坐标,并将其传递给所述车载ECU;
所述辅助制动器用于对车辆进行辅助制动;所述制动电机的输出端和所述辅助制动器相连,用于驱动所述辅助制动器工作;
所述车载ECU分别和所述毫米级雷达探测器、轮速传感器、GPS定位模块、显示屏、语音提示模块、制动电机电气相连,用于车辆在倒车时根据毫米级雷达探测器、轮速传感器、GPS定位模块的感应数据控制显示屏、语音提示模块、制动电机工作。
说明书
技术领域
本实用新型涉及汽车安全领域,尤其涉及一种主动防倒车碰撞的辅助制动装置。
背景技术
随着社会经济的发展和科学技术的进步,越来越多的普通家庭开始拥有自家的小汽车,不可避免的交通事故发生率也在随之上升,而现有的汽车安全技术,主要是集中在安全预警方面,主动安全上应用较少,并且大部分车辆在进行倒车只能进行简单的预警提示,主要依靠驾驶员凭借视觉观测来避免碰撞,而往往这种时候都容易发生碰撞现象,严重影响人们的安全,为此,提出一种主动防倒车碰撞的辅助制动装置。
实用新型内容
本实用新型所要解决的技术问题是针对背景技术中所涉及到的缺陷,提供一种主动防倒车碰撞的辅助制动装置。
本实用新型为解决上述技术问题采用以下技术方案:
一种主动防倒车碰撞的辅助制动装置,包含毫米级雷达探测器、轮速传感器、车载ECU、GPS定位模块、显示屏、语音提示模块、制动电机和辅助制动器;
所述毫米级雷达探测器设置在车辆尾部,用于感应车辆后方障碍相对于车辆的距离和速度,并将其传递给所述车载ECU;
所述轮速传感器设置在车辆的一个后轮上,用于测量车辆的速度和车辆的方向,并将其传递给所述车载ECU;
所述GPS定位模块用于检测车辆的GPS坐标,并将其传递给所述车载ECU;
所述辅助制动器用于对车辆进行辅助制动;所述制动电机的输出端和所述辅助制动器相连,用于驱动所述辅助制动器工作;
所述车载ECU分别和所述毫米级雷达探测器、轮速传感器、GPS定位模块、显示屏、语音提示模块、制动电机电气相连,用于车辆在倒车时根据毫米级雷达探测器、轮速传感器、GPS定位模块的感应数据控制显示屏、语音提示模块、制动电机工作。
本实用新型还公开了一种该主动防倒车碰撞的辅助制动装置的控制方法,包含以下步骤:
步骤1),车辆启动,毫米级雷达探测器、轮速传感器、GPS定位模块分别测得车辆后方障碍相对于车辆的距离L和速度V、车辆的速度V1和车辆的方向、车辆的GPS坐标,并将其传递给所述车载ECU;
步骤2),车载ECU判断车辆的方向是朝前还是朝后;
步骤2.1),如果车辆的方向是朝后:
步骤2.1.1),车载ECU控制显示屏显示当前车辆的GPS坐标、以及车辆后方障碍相对于车辆的距离L和速度V;
步骤2.1.2),车载ECU将车辆的速度V1和预设的速度阈值进行比较;
步骤2.1.2.1),如果车辆的速度V1大于预设的速度阈值,车载ECU控制制动电机工作,驱动辅助制动器进行制动,直至车辆的速度V1小于等于预设的速度阈值;
步骤2.1.3),车载ECU判断车辆后方是否存在障碍物,如果存在:
步骤2.1.3.1),车载ECU根据车辆后方障碍相对于车辆的速度V、车辆的速度V1计算出障碍物的运动速度V2;
步骤2.1.3.2),车载ECU比较L和预设的安全距离阈值Lm,如果L<Lm:
步骤2.1.3.2.1),车载ECU控制语音提示模块发出预警提示;
步骤2.1.3.2.2),车载ECU根据当前车辆的速度V1和障碍物速度V2计算出当前的安全车速;
步骤2.1.3.2.3),车载ECU控制制动电机工作,驱动辅助制动器进行制动,直至车辆的速度小于等于当前的安全车速。
作为本实用新型一种主动防倒车碰撞的辅助制动装置的控制方法进一步的优化方案,所述预设的车速阈值为1m/s。
本实用新型采用以上技术方案与现有技术相比,具有以下技术效果:
1. 该主动防倒车碰撞的辅助制动装置,利用毫米级雷达进行探测车辆后方的情况,能够有效地解决传统探测器的盲区过大的弊端。
2. 实时将行车后方障碍物的状况通过显示屏显示,驾驶员能够很好的了解倒车行驶时,车辆后方障碍物状态。
3. 当车辆倒车行驶时,智能电机驱动辅助制动器对车辆进行限速控制,防止驾驶员由于紧张或疲劳误将加速踏板视为制动踏板进行倒车带来的危险,在车载ECU判断存在碰撞危险时进行紧急制动,以避免驾驶员不能及时的做出相应反映而发生碰撞,能够极大的增加了倒车行驶的安全性。
附图说明
图1为本实用新型一种主动防倒车碰撞的辅助制动装置的结构示意图;
图2为本实用新型一种主动防倒车碰撞的辅助制动装置控制方法的流程示意图。
具体实施方式
下面结合附图对本实用新型的技术方案做进一步的详细说明:
本实用新型可以以许多不同的形式实现,而不应当认为限于这里所述的实施例。相反,提供这些实施例以便使本公开透彻且完整,并且将向本领域技术人员充分表达本实用新型的范围。在附图中,为了清楚起见放大了组件。
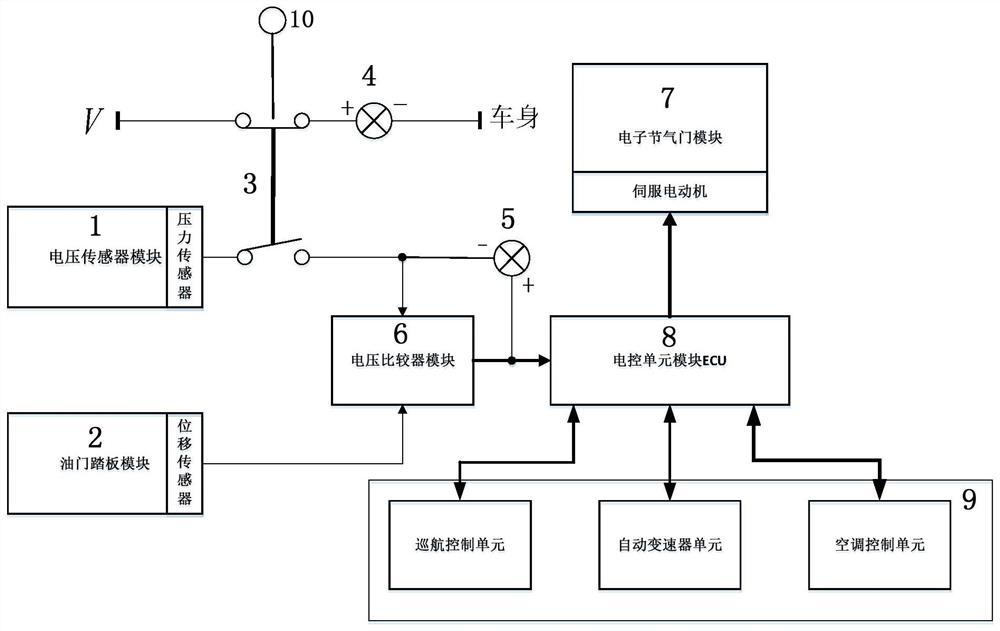
如图1所示,实用新型公开了一种主动防倒车碰撞的辅助制动装置,包含毫米级雷达探测器、轮速传感器、车载ECU、GPS定位模块、显示屏、语音提示模块、制动电机和辅助制动器;
所述毫米级雷达探测器设置在车辆尾部,用于感应车辆后方障碍相对于车辆的距离和速度,并将其传递给所述车载ECU;
所述轮速传感器设置在车辆的一个后轮上,用于测量车辆的速度和车辆的方向,并将其传递给所述车载ECU;
所述GPS定位模块用于检测车辆的GPS坐标,并将其传递给所述车载ECU;
所述辅助制动器用于对车辆进行辅助制动;所述制动电机的输出端和所述辅助制动器相连,用于驱动所述辅助制动器工作;
所述车载ECU分别和所述毫米级雷达探测器、轮速传感器、GPS定位模块、显示屏、语音提示模块、制动电机电气相连,用于车辆在倒车时根据毫米级雷达探测器、轮速传感器、GPS定位模块的感应数据控制显示屏、语音提示模块、制动电机工作。
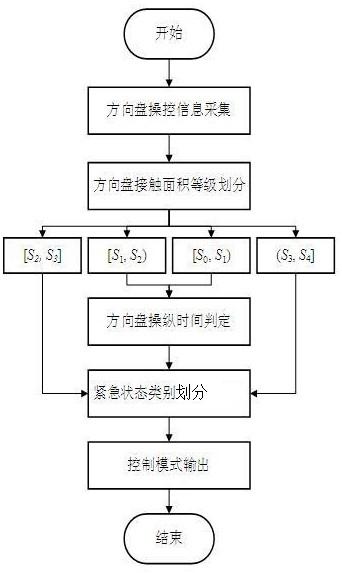
如图2所示,本实用新型还公开了一种该主动防倒车碰撞的辅助制动装置的控制方法,包含以下步骤:
步骤1),车辆启动,毫米级雷达探测器、轮速传感器、GPS定位模块分别测得车辆后方障碍相对于车辆的距离L和速度V、车辆的速度V1和车辆的方向、车辆的GPS坐标,并将其传递给所述车载ECU;
步骤2),车载ECU判断车辆的方向是朝前还是朝后;
步骤2.1),如果车辆的方向是朝后:
步骤2.1.1),车载ECU控制显示屏显示当前车辆的GPS坐标、以及车辆后方障碍相对于车辆的距离L和速度V;
步骤2.1.2),车载ECU将车辆的速度V1和预设的速度阈值进行比较;
步骤2.1.2.1),如果车辆的速度V1大于预设的速度阈值,车载ECU控制制动电机工作,驱动辅助制动器进行制动,直至车辆的速度V1小于等于预设的速度阈值;
步骤2.1.3),车载ECU判断车辆后方是否存在障碍物,如果存在:
步骤2.1.3.1),车载ECU根据车辆后方障碍相对于车辆的速度V、车辆的速度V1计算出障碍物的运动速度V2;
步骤2.1.3.2),车载ECU比较L和预设的安全距离阈值Lm,如果L<Lm:
步骤2.1.3.2.1),车载ECU控制语音提示模块发出预警提示;
步骤2.1.3.2.2),车载ECU根据当前车辆的速度V1和障碍物速度V2计算出当前的安全车速;
步骤2.1.3.2.3),车载ECU控制制动电机工作,驱动辅助制动器进行制动,直至车辆的速度小于等于当前的安全车速。
所述预设的车速阈值优先设置为1m/s。
本技术领域技术人员可以理解的是,除非另外定义,这里使用的所有术语(包括技术术语和科学术语)具有与本实用新型所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样定义,不会用理想化或过于正式的含义来解释。
以上所述的具体实施方式,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施方式而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
一种主动防倒车碰撞的辅助制动装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0