










专利摘要
本实用新型适用于避障小车技术领域,提供了一种可自动寻光充电的避障小车系统,包括安装模块,控制模块、避障模块和光源追踪模块,所述安装模块包括壳体,所述壳体一端转动安装轮带,所述控制模块包括控制主机,所述避障模块包括超声波测距仪,所述超声波测距仪电性连接控制主机,所述控制主机电性连接驱动装置,所述光源追踪模块包括光敏感应装置,所述控制主机电性连接舵机驱动组,所述舵机驱动组电性连接舵机组,所述舵机组一端固定安装太阳能电池,本实用新型解决了太阳能转化条件较为苛刻,现有的避障小车若太阳能板未能正对光源,则发电效率会大幅下降,当光源发生变化时,太阳能板无法及时调整自身姿势的问题。
权利要求
1.一种可自动寻光充电的避障小车系统,包括安装模块,控制模块、避障模块和光源追踪模块,所述安装模块包括壳体,所述壳体一端转动安装轮带(1),所述控制模块包括控制主机(11),所述控制主机(11)电性连接电池组(15),所述避障模块包括超声波测距仪(7),所述超声波测距仪(7)电性连接控制主机(11),所述控制主机(11)电性连接驱动装置,其特征在于:所述光源追踪模块包括光敏感应装置,所述光敏感应装置电性连接控制主机(11),所述控制主机(11)电性连接舵机驱动组,所述舵机驱动组电性连接舵机组,所述舵机组一端固定安装太阳能电池(18),所述太阳能电池(18)电性连接电池组(15)。
2.如权利要求1所述的一种可自动寻光充电的避障小车系统,其特征在于:所述控制主机(11)包括NIOS II软核处理器(111),所述NIOS II软核处理器(111)电性连接DRAM控制器(113)与EPCS控制器(114),所述NIOS II软核处理器(111)电性连接JTAG串口(112)。
3.如权利要求1所述的一种可自动寻光充电的避障小车系统,其特征在于:所述驱动装置包括第一直流电机(2),所述控制主机(11)电性连接第一直流电机(2),所述控制主机(11)电性连接第二直流电机(8),所述第一直流电机(2)与第二直流电机(8)均电性连接霍尔编码器(6),所述霍尔编码器(6)电性连接控制主机(11)。
4.如权利要求1所述的一种可自动寻光充电的避障小车系统,其特征在于:所述光敏感应装置包括光敏感应器(14),所述光敏感应器(14)设有四个,所述四个光敏感应器(14)分别对应上下左右四个方位。
5.如权利要求1所述的一种可自动寻光充电的避障小车系统,其特征在于:所述舵机组包括高低机(17),所述高低机(17)电性连接控制主机(11)。
6.如权利要求1所述的一种可自动寻光充电的避障小车系统,其特征在于:所述舵机组还包括方向机(16),所述方向机(16)电性连接控制主机(11)。
7.如权利要求1所述的一种可自动寻光充电的避障小车系统,其特征在于:所述壳体一端固定安装微型探头(5),所述微型探头(5)电性连接控制主机(11),所述控制主机(11)电性连接寄存器(4)。
8.如权利要求7所述的一种可自动寻光充电的避障小车系统,其特征在于:所述寄存器(4)一端电性连接无线传输器(3),所述无线传输器(3)电性连接控制主机(11),所述无线传输器(3)无线连接云端控制中心。
9.如权利要求1所述的一种可自动寻光充电的避障小车系统,其特征在于:所述壳体沿中心线对称开设两个安装孔,所述安装孔内设有缓冲弹簧,所述缓冲弹簧一端固定安装升降杆(12),所述升降杆(12)电性连接控制主机(11),所述升降杆(12)一端固定安装防撞板(13)。
10.如权利要求1所述的一种可自动寻光充电的避障小车系统,其特征在于:所述壳体一端固定安装鸣笛器(9),所述鸣笛器(9)电性连接控制主机(11),所述壳体一端固定安装警示灯(10),所述警示灯(10)电性连接控制主机(11)。
说明书
技术领域
本实用新型属于避障小车领域,尤其涉及一种可自动寻光充电的避障小车系统。
背景技术
自汽车发明以来,一直在人类生产生活当中扮演着极为重要的角色,从自动化向智能化方向转变是车辆发展的大趋势,而主动回避障碍是智能化载具的一个基本的安全要求,也是智能辅助驾驶的关键,另一方面,汽车的大范围应用也带来了严重的能源与环境污染问题,如今越来越多的汽车制造商正不断推出使用清洁能源的汽车方案,而太阳能汽车正是其中一种方案,但太阳能转化条件较为苛刻,现有的避障小车若太阳能板未能正对光源,则发电效率会大幅下降,当光源发生变化时,太阳能板无法及时调整自身姿势。
实用新型内容
本实用新型提供一种可自动寻光充电的避障小车系统,旨在解决太阳能转化条件较为苛刻,现有的避障小车若太阳能板未能正对光源,则发电效率会大幅下降,当光源发生变化时,太阳能板无法及时调整自身姿势的问题。
本实用新型是这样实现的,一种可自动寻光充电的避障小车系统,包括安装模块,控制模块、避障模块和光源追踪模块,所述安装模块包括壳体,所述壳体一端转动安装轮带,所述控制模块包括控制主机,所述控制主机电性连接电池组,所述避障模块包括超声波测距仪,所述超声波测距仪电性连接控制主机,所述控制主机电性连接驱动装置,所述光源追踪模块包括光敏感应装置,所述光敏感应装置电性连接控制主机,所述控制主机电性连接舵机驱动组,所述舵机驱动组电性连接舵机组,所述舵机组一端固定安装太阳能电池,所述太阳能电池电性连接电池组。
优选的,所述控制主机包括NIOSII软核处理器,所述NIOSII软核处理器电性连接DRAM控制器与EPCS控制器,所述NIOSII软核处理器电性连接JTAG串口。
优选的,所述驱动装置包括第一直流电机,所述控制主机电性连接第一直流电机,所述控制主机电性连接第二直流电机,所述第一直流电机与第二直流电机均电性连接霍尔编码器,所述霍尔编码器电性连接控制主机。
优选的,所述光敏感应装置包括光敏感应器,所述光敏感应器设有四个,所述四个光敏感应器分别对应上下左右四个方位。
优选的,所述舵机组包括高低机,所述高低机电性连接控制主机。
优选的,所述舵机组还包括方向机,所述方向机电性连接控制主机。
优选的,所述壳体一端固定安装微型探头,所述微型探头电性连接控制主机,所述控制主机电性连接寄存器。
优选的,所述寄存器一端电性连接无线传输器,所述无线传输器电性连接控制主机,所述无线传输器无线连接云端控制中心。
优选的,所述壳体沿中心线对称开设两个安装孔,所述安装孔内设有缓冲弹簧,所述缓冲弹簧一端固定安装升降杆,所述升降杆电性连接控制主机,所述升降杆一端固定安装防撞板。
优选的,所述壳体一端固定安装鸣笛器,所述鸣笛器电性连接控制主机,所述壳体一端固定安装警示灯,所述警示灯电性连接控制主机。
与现有技术相比,本实用新型的有益效果是:本实用新型的一种可自动寻光充电的避障小车系统,通过设置光源追踪模块,当光源出现移动时,光敏感应装置可以及时捕获光源的移动,并将光源移动信息转换为电信号传达至控制主机,控制主机根据计算,可以得到太阳能电池需要移动的角度,并通过舵机驱动组启动舵机组,舵机组根据光源的移动可以带动太阳能电池在水平和垂直方向移动,确保太阳能电池输入端时刻正对光源,保证太阳能电池对光源的充分利用,提高了资源的使用率,解决了太阳能转化条件较为苛刻,现有的避障小车若太阳能板未能正对光源,则发电效率会大幅下降,当光源发生变化时,太阳能板无法及时调整自身姿势的问题。
附图说明
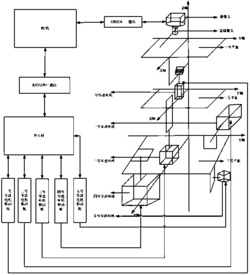
图1为本实用新型的系统流程图;
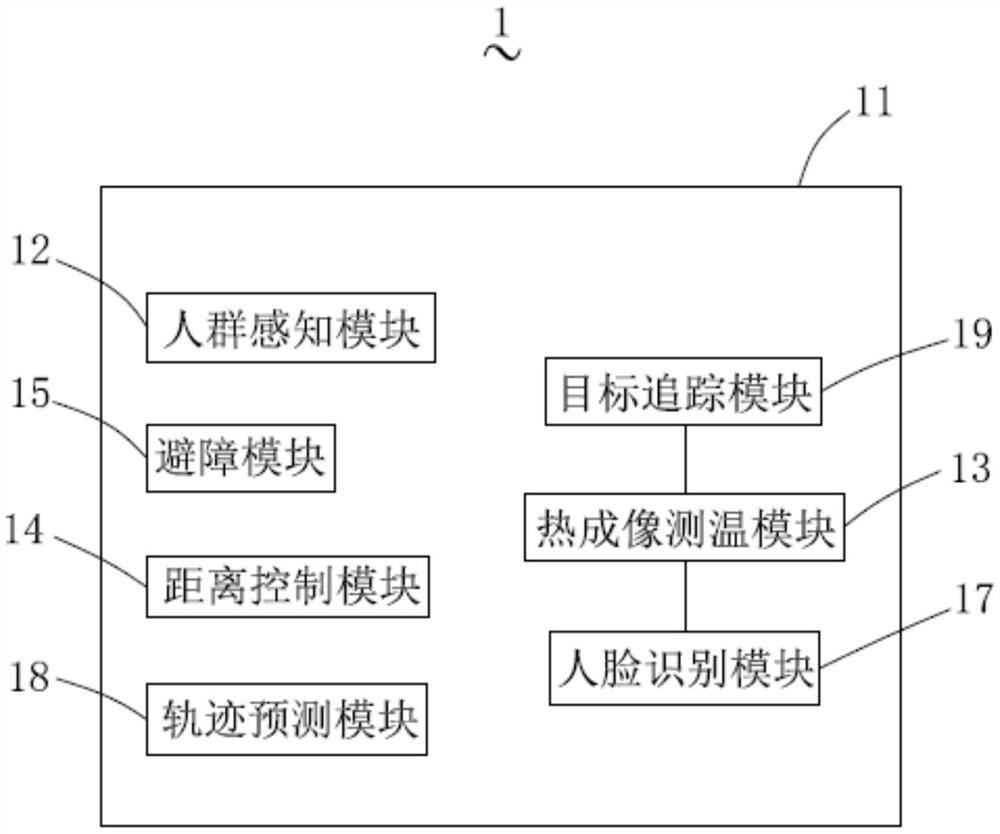
图2为本实用新型中控制主机的结构示意图;
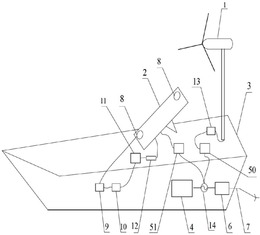
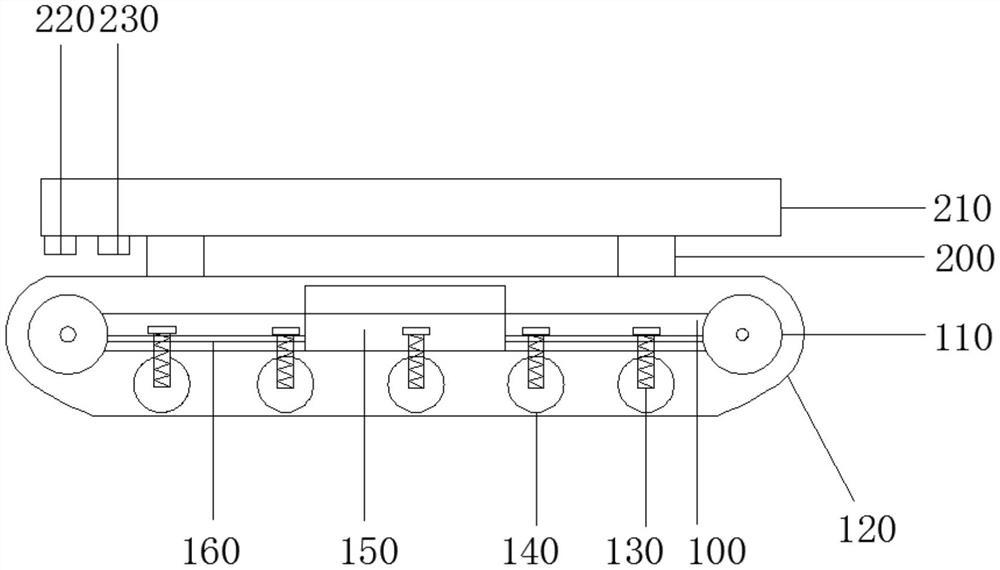
1、轮带,2、第一直流电机,3、无线传输器,4、寄存器,5、微型探头,6、霍尔编码器,7、超声波测距仪,8、第二直流电机,9、鸣笛器,10、警示灯,11、控制主机,12、升降杆,13、防撞板,14、光敏感应器,15、电池组,16、方向机,17、高低机,18、太阳能电池,111、NIOSII软核处理器,112、JTAG串口,113、DRAM控制器,114、EPCS控制器。
具体实施方式
为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
请参阅图1-2,本实用新型提供一种技术方案:一种可自动寻光充电的避障小车系统,包括安装模块,控制模块、避障模块和光源追踪模块,安装模块包括壳体,壳体一端转动安装轮带1,控制模块包括控制主机11,控制主机11电性连接电池组15,避障模块包括超声波测距仪7,超声波测距仪7电性连接控制主机11,控制主机11电性连接驱动装置,光源追踪模块包括光敏感应装置,光敏感应装置电性连接控制主机11,控制主机11电性连接舵机驱动组,舵机驱动组电性连接舵机组,舵机组一端固定安装太阳能电池18,太阳能电池18电性连接电池组15。
在本实施方式中,由于小车的控制系统为需要高精度的控制,NIOSII软核处理器111的计算精度高,响应速度快,满足了小车控制系统的需求,通过NIOSII软核处理器111电性连接DRAM控制器113与EPCS控制器114,可以确保NIOSII软核处理器111在执行过程中的高稳定性,通过NIOSII软核处理器111电性连接JTAG串口112,可以实现对控制主机11内原件进行分别测试,通过在控制主机11内设置两个设定值,当超声波测距仪7检测到前方有障碍物时,将信号传达至控制主机11,控制主机11经过计算确定与障碍物之间的距离处于那个设定区间,当与障碍物处于第一设定值时,控制主机11通过霍尔编码器6启动第一直流电机2和第二直流电机8,带动轮带1进行移动,使小车进行转向避让,当与障碍物处于第二设定值时,由于第二设定值处于与障碍物非常近的距离,进而控制主机11通过霍尔编码器6启动第一直流电机2和第二直流电机8,带动轮带1进行移动,使小车反向移动,并进行转向避让,实现了避障的功能,当光源出现移动时,光敏感应装置可以及时捕获光源的移动,光敏感应器14将所接收到的光源信息收集并传达至控制主机11,通过光敏感应器14设有四个,四个光敏感应器14分别对应上下左右四个方位,使得光敏感应器14可以多角度的收集光源信号,便于太阳能电池18及时跟随光源移动,确保太阳能电池18任意时刻都是正对光源,并将光源移动信息转换为电信号传达至控制主机11,控制主机11根据计算,可以得到太阳能电池18需要移动的角度,并通过舵机驱动组启动舵机组,当控制主机11接收到光源移动的信号后,通过启动高低机17,由于光源会随着时间在竖直方向进行周期性转变,高低机17可以在竖直方向进行180度旋转,进而确保太阳能电池18在竖直方向上可以任意时刻正对光源,当控制主机11接收到光源移动的信号后,通过启动方向机16,由于光源会随着时间在水平方向进行周期性转变,方向机16可以在水平方向进行360度旋转,进而确保太阳能电池18在水平方向上可以任意时刻正对光源,舵机组根据光源的移动可以带动太阳能电池18在水平和垂直方向移动,确保太阳能电池18输入端时刻正对光源,保证太阳能电池18对光源的充分利用,提高了资源的使用率,解决了太阳能转化条件较为苛刻,现有的避障小车若太阳能板未能正对光源,则发电效率会大幅下降,当光源发生变化时,太阳能板无法及时调整自身姿势的问题。
进一步的,控制主机11包括NIOSII软核处理器111,NIOSII软核处理器111电性连接DRAM控制器113与EPCS控制器114,NIOSII软核处理器111电性连接JTAG串口112。
在本实施方式中,由于小车的控制系统为需要高精度的控制,NIOSII软核处理器111的计算精度高,响应速度快,满足了小车控制系统的需求,通过NIOSII软核处理器111电性连接DRAM控制器113与EPCS控制器114,可以确保NIOSII软核处理器111在执行过程中的高稳定性,通过NIOSII软核处理器111电性连接JTAG串口112,可以实现对控制主机11内原件进行分别测试。
进一步的,驱动装置包括第一直流电机2,控制主机11电性连接第一直流电机2,控制主机11电性连接第二直流电机8,第一直流电机2与第二直流电机8均电性连接霍尔编码器6,霍尔编码器6电性连接控制主机11。
在本实施方式中,通过在控制主机11内设置两个设定值,当超声波测距仪7检测到前方有障碍物时,将信号传达至控制主机11,控制主机11经过计算确定与障碍物之间的距离处于那个设定区间,当与障碍物处于第一设定值时,控制主机11通过霍尔编码器6启动第一直流电机2和第二直流电机8,带动轮带1进行移动,使小车进行转向避让,当与障碍物处于第二设定值时,由于第二设定值处于与障碍物非常近的距离,进而控制主机11通过霍尔编码器6启动第一直流电机2和第二直流电机8,带动轮带1进行移动,使小车反向移动,并进行转向避让,实现了避障的功能。
进一步的,光敏感应装置包括光敏感应器14,光敏感应器14设有四个,四个光敏感应器14分别对应上下左右四个方位。
在本实施方式中,光敏感应器14将所接收到的光源信息收集并传达至控制主机11,通过光敏感应器14设有四个,四个光敏感应器14分别对应上下左右四个方位,使得光敏感应器14可以多角度的收集光源信号,便于太阳能电池18及时跟随光源移动,确保太阳能电池18任意时刻都是正对光源。
进一步的,舵机组包括高低机17,高低机17电性连接控制主机11。
在本实施方式中,当控制主机11接收到光源移动的信号后,通过启动高低机17,由于光源会随着时间在竖直方向进行周期性转变,高低机17可以在竖直方向进行180度旋转,进而确保太阳能电池18在竖直方向上可以任意时刻正对光源。
进一步的,舵机组还包括方向机16,方向机16电性连接控制主机11。
在本实施方式中,当控制主机11接收到光源移动的信号后,通过启动方向机16,由于光源会随着时间在水平方向进行周期性转变,方向机16可以在水平方向进行360度旋转,进而确保太阳能电池18在水平方向上可以任意时刻正对光源。
进一步的,壳体一端固定安装微型探头5,微型探头5电性连接控制主机11,控制主机11电性连接寄存器4。
在本实施方式中,通过在壳体一端固定安装微型探头5,可以时刻记录小车的行车情况,并通过寄存器4将视频信息储存起来,便于后期进行查阅。
进一步的,寄存器4一端电性连接无线传输器3,无线传输器3电性连接控制主机11,无线传输器3无线连接云端控制中心。
在本实施方式中,由于寄存器4容量有限,需要定时删除视频信息,通过在寄存器4一端电性连接无线传输器3,可将视频信息传送至云端控制中心,同时使用者可以通过手机或者移动电脑随时随地的调取视频信息。
进一步的,壳体沿中心线对称开设两个安装孔,安装孔内设有缓冲弹簧,缓冲弹簧一端固定安装升降杆12,升降杆12电性连接控制主机11,升降杆12一端固定安装防撞板13。
在本实施方式中,由于避障小车的避障工功能为同一水平线的避障,当侧方被撞击时,无论对车身还是车内人员都会造成较大的损害,小车启动时,升降杆12将推动防撞板13,使防撞板13位于小车两侧,当侧方被撞击时,撞击物体挤压防撞板13,通过在升降杆12一端设有缓冲弹簧,可以大幅度的减轻撞击力度,提高了小车的安全性能。
进一步的,壳体一端固定安装鸣笛器9,鸣笛器9电性连接控制主机11,壳体一端固定安装警示灯10,警示灯10电性连接控制主机11。
在本实施方式中,当控制主机11接收到障碍物信息后,启动警示灯10与鸣笛器9,警示灯10闪烁以及鸣笛器9发出鸣笛警报,用以提醒前方人为控制的障碍物,进一步提高了小车的安全性。
以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
一种可自动寻光充电的避障小车系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0