







专利摘要
本发明公开了一种列车车轮直径检测的方法及其系统,通过激光发射和接收装置接收到一组列车车轮经过时的时间序列,结合现场安装的安装参数,首先计算出车轮经过时的瞬时速度,在通过速度计算出激光在车轮上划过的弦长,最后通过相应算法计算出车轮直径。本发明只需采用两个激光发射接收装置,大量节省成本;不需要额外的车速检测装置即可得到列车的瞬时速度;两个激光发射接收装置独立计算出车轮直径,并对结果求平均,可以极大的减小误差。
权利要求
1.一种列车车轮直径检测的方法,其特征在于包括以下步骤:
步骤1,传感器布设:沿着列车前进方向,在轨道内侧安装两个激光发射装置,分别记为S1、S2,两个激光发射装置在同一条直线上且平行于轨道延伸方向,激光发射装置发射的激光沿轨道延伸的垂直方向由轨道内侧射向轨道外侧;在轨道外侧依次安装两个激光接收装置,记为R1、R2,两个激光接收装置处于同一竖直面上且该竖直面平行于轨道延伸方向,R1接收S1发出的激光,R2接收S2发出的激光;S1、S2发射的激光与垂直于轨道延伸方向所在面的水平线夹角分别为α
步骤2,安装参数的获取:在轨道上放置一个用于标定的轮对,获得S1发射的激光在车轮内侧面上留下的光斑到轨道上表面水平面垂直高度为H
步骤3,传感器数据获取:当车轮经过时,激光接收装置R1、R2会分别经历“导通——截止——导通”的状态,激光接收装置记录下各状态变化的时刻,每一个车轮会得到由四个时刻数据组成的一组时间序列;
步骤4,车辆速度获取:当列车经过步骤1中激光传感器安装的位置时,根据激光发射装置S1、S2的间距L以及状态变化时的时刻数据,得到车轮通过设备时的瞬时速度;
步骤5,车轮直径获取:根据步骤4得到的列车瞬时速度,结合车轮通过时的时刻,得到激光打在车轮上的弦长,从而计算得到车轮直径。
2.根据权利要求1所述的方法,其特征在于步骤1中,激光发射装置由调制编码器和激光发射器组成,激光接收装置由激光接收器、放大检波器和调制解调器组成,调制编码器调制出一定频率的激光由激光发射器发出;当激光接收器接收到激光时,会通过激光解调器对激光的频率进行解析,当激光频率符合时记录下开始照射和结束照射的时刻,若激光频率不符合接收条件,说明该光线是噪声或干扰,予以滤除;上述激光“接收——判断——记录”过程用时在30微秒以内以保证直径测量的精度。
3.根据权利要求1所述的方法,其特征在于步骤1中的激光发射装置S1、S2之间的距离L应满足:840mm<L<3140mm,即L应大于标准轮对的直径值,防止出现S1与S2发射的激光同时打在车轮上的情况,造成激光之间的干扰和时间序列的混乱,且L应小于转向架的前后轴距与标准轮对的直径值的和值,使一个车轮测量期间不会有另一个车轮进入S1的检测区域。
4.根据权利要求1所述的方法,其特征在于步骤2中的激光束与水平夹角α
5.根据权利要求1所述的方法,其特征在于步骤2中的车轮内侧面为:与轨道的中心线所在的铅锤面平行,向轨道内侧平移70mm所在面。
6.根据权利要求1所述的方法,其特征在于步骤3中的时间序列有以下四个时刻依次构成:①R1由“导通——截止”的时刻t
7.根据权利要求1所述的方法,其特征在于步骤4中的车轮通过时的瞬时速度由下列步骤计算得出:
第1步,根据步骤1获得激光发射装置S1、S2之间的距离L;
第2步,根据步骤3获取车轮开始遮挡S1的时刻t
第3步,对速度V
8.根据权利要求7所述的方法,其特征在于步骤5中的车轮直径的获取方法如下:
第1步,根据步骤4得到车轮通过时的平均速度
第2步,根据步骤3获取车轮开始遮挡S1的时刻t
第3步,设轮缘顶点圆半径为R,轮缘高已知为h,求得S1激光在车轮内侧面上划过的轨迹距离车轮圆心的垂直高度为R-H
求得车轮的一个轮缘顶点圆半径值为:
两倍的轮缘顶点圆半径再减去两倍的轮缘高h求得车轮直径r
同理,S2激光在车轮内侧面上划过的轨迹距离车轮圆心的垂直高度为R-H
求得车轮的另一个轮缘顶点圆半径为:
两倍的轮缘顶点圆半径再减去两倍的轮缘高h求得车轮直径r
第4步,将第3步中获取的两个车轮直径值求平均减小误差,其平均值作为车轮直径r:
9.一种列车车轮直径检测的系统,其特征在于包括与中央处理单元连接的两个激光发射装置和激光接收装置,沿着列车前进方向,在轨道内侧安装两个激光发射装置,分别记为S1、S2,两个激光发射装置在同一条直线上且平行于轨道延伸方向,激光发射装置发射的激光沿轨道延伸的垂直方向由轨道内侧射向轨道外侧;在轨道外侧依次安装两个激光接收装置,记为R1、R2,两个激光接收装置处于同一竖直面上且该竖直面平行于轨道延伸方向,R1接收S1发出的激光,R2接收S2发出的激光;S1、S2发射的激光与垂直于轨道延伸方向所在面的水平线夹角分别为α
在轨道上放置一个用于标定的轮对,获得S1发射的激光在车轮内侧面上留下的光斑到轨道上表面水平面垂直高度为H
当车轮经过时,激光接收装置R1、R2会分别经历“导通——截止——导通”的状态,激光接收装置记录下各状态变化的时刻,每一个车轮会得到由四个时刻数据组成的一组时间序列;
所述中央处理单元包括车辆速度获取模块和车轮直径获取模块,在车辆速度获取模块中,当列车经过激光传感器安装的位置时,根据激光发射装置S1、S2的间距L以及状态变化时的时刻数据,得到车轮通过设备时的瞬时速度;在车轮直径获取模块中,根据列车瞬时速度,结合车轮通过时的时刻,得到激光打在车轮上的弦长,从而计算得到车轮直径。
说明书
技术领域
本发明属于轨道车辆在线监测技术领域,特别是一种列车车轮直径检测的方法及其系统。
背景技术
在城市轨道交通中,车轮是走行部中的损耗最大的部件之一。车轮的状态与列车的安全运营密切相关,如列车运营对车轮的尺寸有着严格的要求,使用不合要求的车轮会使列车运行中发生颠簸甚至脱轨等安全事故。其中车轮直径作为车轮状态的重要指标之一,对列车安全运行有很大的影响。因此,对车轮直径的检测是十分必要的。
目前,在轮对尺寸检测方面,目前还广泛采用人工测量的方式。人工测量采用轮径尺,在测量过程中受人工的力度、工人测量的熟练度以及现场条件有密切关系,人工测量存在较大的误差。另一方面,由于列车车轮数目较多,采用人工测量方式耗时较大,检修效率极低。
近年来,随着激光及图像技术的发展,出现了一批非接触式的轮径测量装置和方法。如中国专利CN1899904A(列车轮对尺寸在线检测方法及装置)利用四个基于PSD的激光位移传感器,获取列车车轮端面到激光探测器的距离,然后计算出轮缘厚、轮缘高、轮径值。这种方法所需的激光传感器价格昂贵,对安装角度较为严格,不利于大规模推广使用。
发明内容
本发明的目的在于提供一种结构布设方便、计算速度快、测量结果准确的列车车轮直径的检测方法及其系统。
实现本发明目的的技术解决方案为:一种列车车轮直径检测的方法及其系统,包括以下步骤:
步骤1,传感器布设:沿着列车前进方向,在轨道内侧安装两个激光发射装置,分别记为S1、S2,两个激光发射装置在同一条直线上且平行于轨道延伸方向,激光发射装置发射的激光沿轨道延伸的垂直方向由轨道内侧射向轨道外侧;在轨道外侧依次安装两个激光接收装置,记为R1、R2,两个激光接收装置处于同一竖直面上且该竖直面平行于轨道延伸方向,R1接收S1发出的激光,R2接收S2发出的激光;S1、S2发射的激光与垂直于轨道延伸方向所在面的水平线夹角分别为α1、α2,激光发射装置S1、S2处于同一水平高度且激光束之间的间距为L,激光发射装置S1、S2所在的高度低于轨道平面以保证激光发射设备和列车的安全;
步骤2,安装参数的获取:在轨道上放置一个用于标定的轮对,获得S1发射的激光在车轮内侧面上留下的光斑到轨道上表面水平面垂直高度为H1,S2发射的激光在车轮内侧面上留下的光斑到轨道上表面水平面垂直高度为H2;
步骤3,传感器数据获取:当车轮经过时,激光接收装置R1、R2会分别经历“导通——截止——导通”的状态,激光接收装置记录下各状态变化的时刻,每一个车轮会得到由四个时刻数据组成的一组时间序列;
步骤4,车辆速度获取:当列车经过步骤1中激光传感器安装的位置时,根据激光发射装置S1、S2的间距L以及状态变化时的时刻数据,得到车轮通过设备时的瞬时速度;
步骤5,车轮直径获取:根据步骤4得到的列车瞬时速度,结合车轮通过时的时刻,得到激光打在车轮上的弦长,从而计算得到车轮直径。
本发明与现有技术相比,其显著优点:(1)只需采用两个激光发射接收装置,大量节省成本;(2)不需要额外的车速检测装置即可得到列车的瞬时速度;(3)两个激光发射接收装置独立计算出车轮直径,并对结果求平均,可以极大的减小误差;(4)具有在线非接触式测量等优点,为实现车轮直径在线测量提供了一种精确度更高的解决方案。
下面结合附图对本发明作进一步详细描述。
附图说明
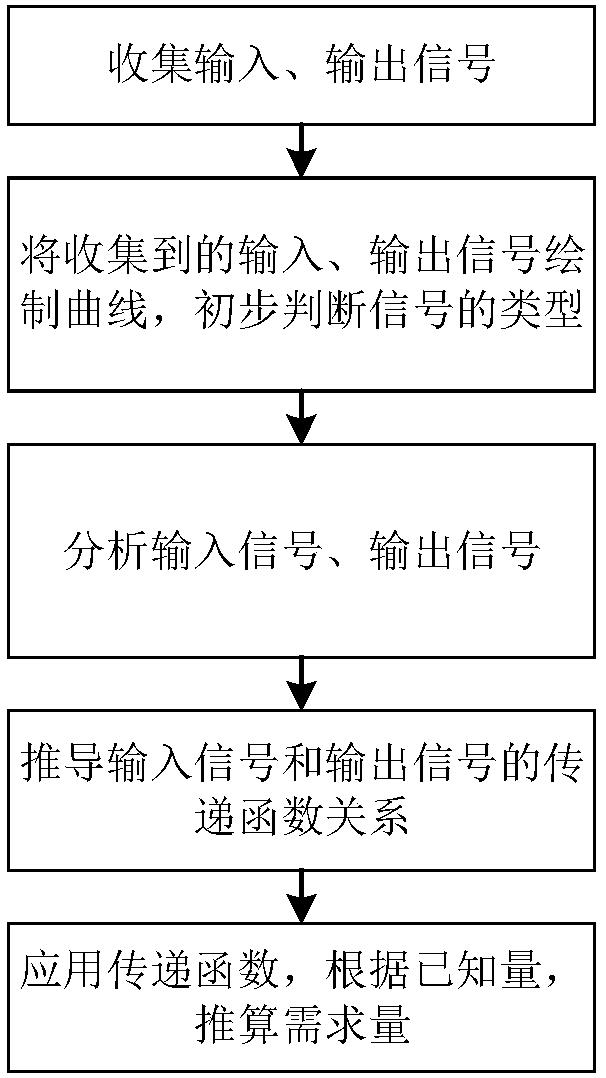
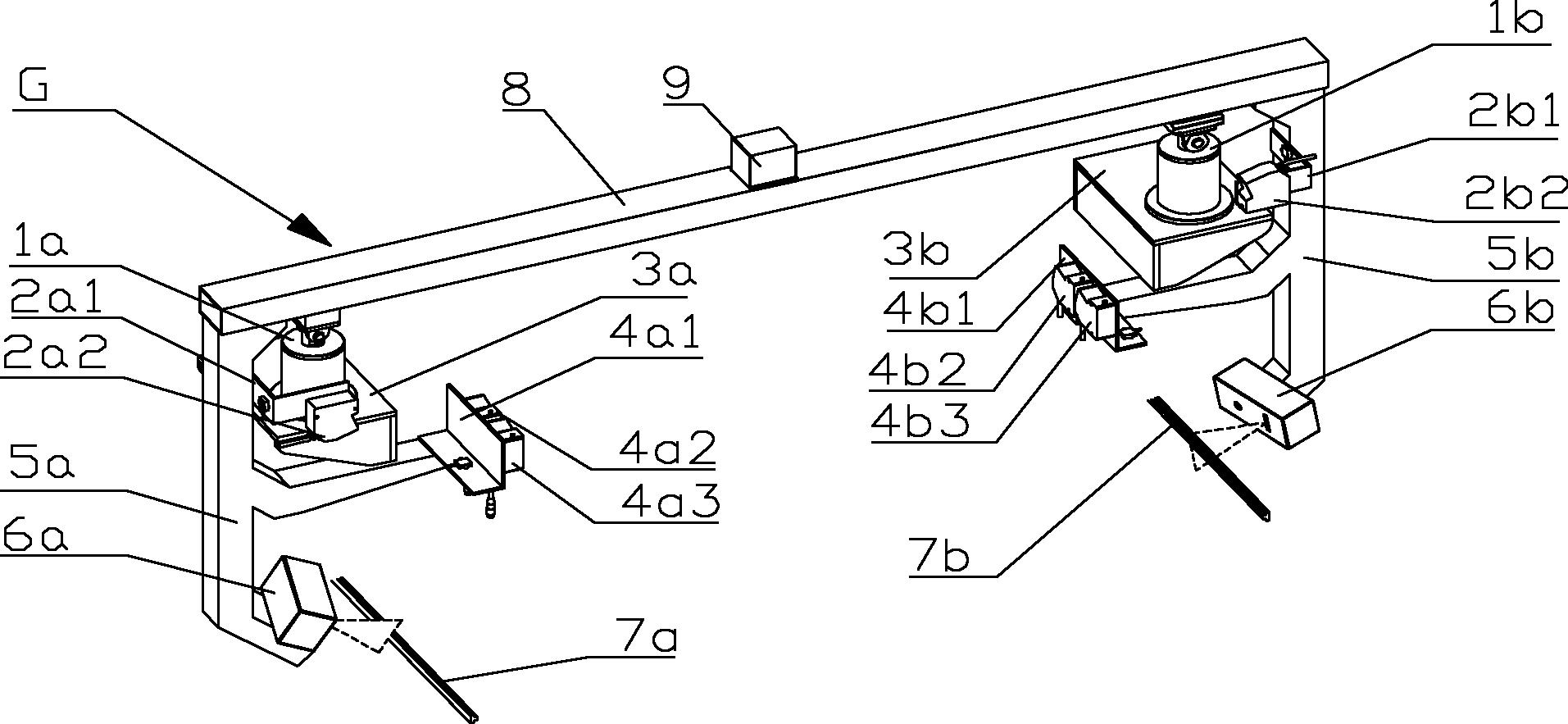
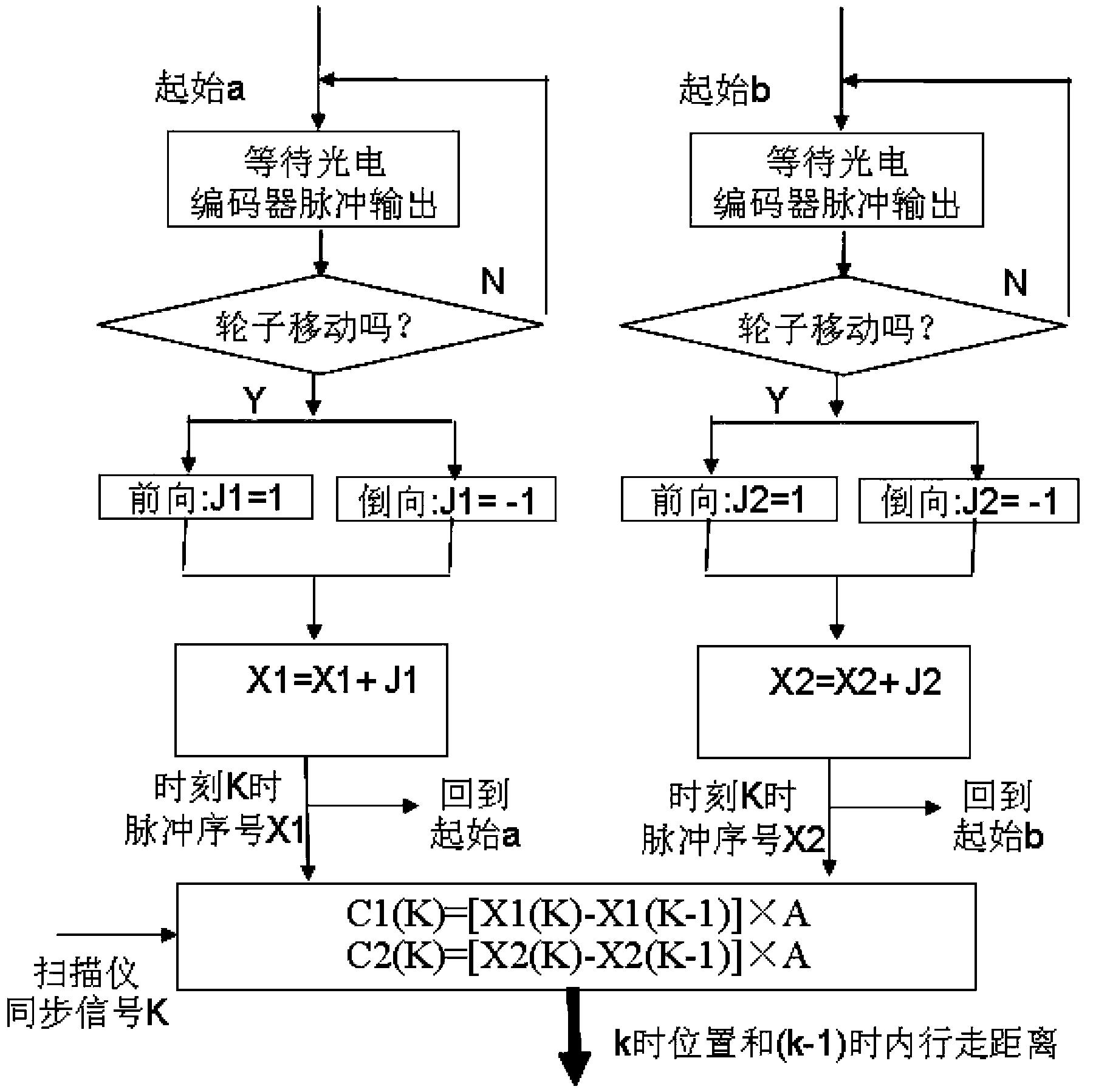
图1是本发明车轮直径检测方法的流程图。
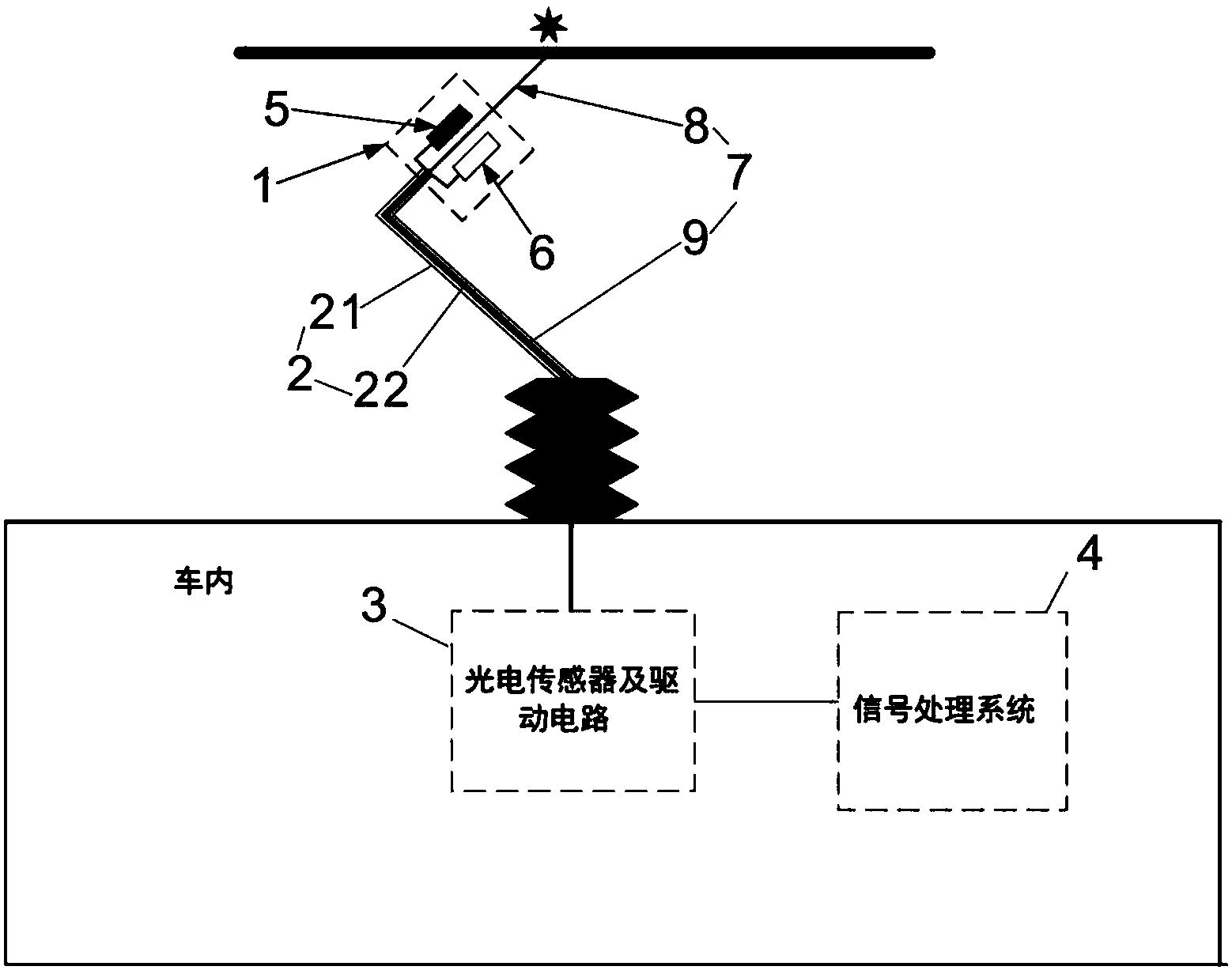
图2是本发明车轮直径检测的传感器安装示意图。
图3是本发明车轮直径检测的传感器布设图。
图4是本发明车轮直径检测的传感器安装截面图。
图5是本发明车轮时刻序列示意图。
图6是直径计算原理说明图。
具体实施方式
结合图1,本发明列车车轮直径检测的方法,包括以下步骤:
步骤1,传感器布设:如图2所示,沿着列车前进方向,在轨道内侧安装两个激光发射装置,分别记为S1、S2,两个激光发射装置在同一条直线上且平行于轨道延伸方向,激光发射装置发射的激光沿轨道延伸的垂直方向由轨道内侧射向轨道外侧;在轨道外侧依次安装两个激光接收装置,记为R1、R2,两个激光接收装置处于同一竖直面上且该竖直面平行于轨道延伸方向,R1接收S1发出的激光,R2接收S2发出的激光;S1、S2发射的激光与垂直于轨道延伸方向所在面的水平线夹角分别为α1、α2,如图3所示,激光发射装置S1、S2处于同一水平高度且激光束之间的间距为L,激光发射装置S1、S2所在的高度低于轨道平面以保证激光发射设备和列车的安全。
所述激光发射装置由调制编码和激光发射器组成,激光接收装置由激光接收器、放大检波器和调制解调器组成,调制编码器调制出一定频率的激光由激光发射器发出;当激光接收器接收到激光时,会通过激光解调器对激光的频率进行解析,当激光频率符合时记录下开始照射和结束照射的时刻,若激光频率不符合接收条件,说明该光线是噪声或干扰,予以滤除。上述激光“接收——判断——记录”过程用时在30微秒以内以保证直径测量的精度。
所述激光发射装置S1、S2之间的距离L应满足:840mm<L<3140mm,即L应大于标准轮对的直径值(840mm),防止出现S1与S2发射的激光同时打在车轮上的情况,造成激光之间的干扰和时间序列的混乱,且L应小于转向架的前后轴距(2300mm)与标准轮对的直径值(840mm)的和值,使一个车轮测量期间不会有另一个车轮进入S1的检测区域。
步骤2,安装参数的获取:如图4所示,在轨道上放置一个用于标定的轮对,获得S1发射的激光在车轮内侧面上留下的光斑到轨道上表面水平面垂直高度为H1,S2发射的激光在车轮内侧面上留下的光斑到轨道上表面水平面垂直高度为H2。激光束与水平夹角α1、α2应满足:S1、S2发射的激光照射在车轮内侧,光斑高度低于车轮圆心、高于轨面且不会照射到车轮的刹车片以及其他车底装置上。车轮内侧面为:与轨道的中心线所在的铅锤面平行,向轨道内侧平移70mm所在面。
步骤3,传感器数据获取:如图5所示,当车轮经过时,激光接收装置R1、R2会分别经历“导通——截止——导通”的状态,激光接收装置记录下各状态变化的时刻,每一个车轮会得到由四个时刻数据组成的一组时间序列。时间序列有以下四个时刻依次构成:①R1由“导通——截止”的时刻t1;②R1由“截止——导通”的时刻t2;③R2由“导通——截止”的时刻t3;④R2由“截止——导通”的时刻t4。
步骤4,车辆速度获取:当列车经过步骤1中激光传感器安装的位置时,根据激光发射装置S1、S2的间距L以及状态变化时的时刻数据,得到车轮通过设备时的瞬时速度。其中车轮通过时的瞬时速度由下列步骤计算得出:
第1步,根据步骤1获得激光发射装置S1、S2之间的距离L;
第2步,根据步骤3获取车轮开始遮挡S1的时刻t1和开始遮挡S2的时刻t3,以及S1、S2激光束之间距离L求得一个瞬时速度值V1;根据车轮离开S1的时刻t2和离开S2的时刻t4,以及S1、S2激光束之间距离L求得一个瞬时速度值V2,其中:
第3步,对速度V1、V2求均值获得该车轮从开始遮挡S1到最后走出S2射程期间的平均速度
步骤5,车轮直径获取:根据步骤4得到的列车瞬时速度,结合车轮通过时的时刻,得到激光打在车轮上的弦长,从而计算得到车轮直径。该车轮直径的获取方法如下:
第1步,根据步骤4得到车轮通过时的平均速度
第2步,根据步骤3获取车轮开始遮挡S1的时刻t1和离开S1的时刻t2,求得S1在车轮上划过的一条弦长l1;根据步骤3获取车轮开始遮挡S2的时刻t3和离开S2的时刻t4,求得S2在车轮上划过的一条弦长l2,其中:
第3步,设轮缘顶点圆半径为R,轮缘高已知为h,求得S1激光在车轮内侧面上划过的轨迹距离车轮圆心的垂直高度为R-H1-h,由弦长可以通过勾股定理求得轮缘顶点圆一个半径R1,两倍的轮缘顶点圆直径再减去两倍的轮缘高h求得车轮直径r1,即通过勾股定理
求得车轮的一个轮缘顶点圆半径值为:
两倍的轮缘顶点圆直径再减去两倍的轮缘高h求得车轮直径r1
同理,S2激光在车轮内侧面上划过的轨迹距离车轮圆心的垂直高度为R-H2-h,由弦长通过勾股定理求得轮缘顶点圆另一个半径R2,两倍的轮缘顶点圆直径再减去两倍的轮缘高h可以求得车轮直径r2,即通过勾股定理
求得车轮的另一个轮缘顶点圆半径为:
两倍的轮缘顶点圆直径再减去两倍的轮缘高h求得车轮直径r2:
第4步,由于两次误差权重相同,故取两次测量的平均值作为车轮直径最终测量结果。将第3步中获取的两个车轮直径值求平均减小误差,其平均值作为列车车轮直径r:
结合图2、图3和图4,本发明列车车轮直径检测的装置,包括与中央处理单元的两个激光发射装置和激光接收装置,沿着列车前进方向,在轨道内侧安装两个激光发射装置,分别记为S1、S2,两个激光发射装置在同一条直线上且平行于轨道延伸方向,激光发射装置发射的激光沿轨道延伸的垂直方向由轨道内侧射向轨道外侧;在轨道外侧依次安装两个激光接收装置,记为R1、R2,两个激光接收装置处于同一竖直面上且该竖直面平行于轨道延伸方向,R1接收S1发出的激光,R2接收S2发出的激光;S1、S2发射的激光与垂直于轨道延伸方向所在面的水平线夹角分别为α1、α2,激光发射装置S1、S2处于同一水平高度且激光束之间的间距为L,激光发射装置S1、S2所在的高度低于轨道平面以保证激光发射设备和列车的安全;
在轨道上放置一个用于标定的轮对,获得S1发射的激光在车轮内侧面上留下的光斑到轨道上表面水平面垂直高度为H1,S2发射的激光在车轮内侧面上留下的光斑到轨道上表面水平面垂直高度为H2;
当车轮经过时,激光接收装置R1、R2会分别经历“导通——截止——导通”的状态,激光接收装置记录下各状态变化的时刻,每一个车轮会得到由四个时刻数据组成的一组时间序列;
所述中央处理单元包括车辆速度获取模块和车轮直径获取模块,在车辆速度获取模块中,当列车经过激光传感器安装的位置时,根据激光发射装置S1、S2的间距L以及状态变化时的时刻数据,得到车轮通过设备时的瞬时速度;在车轮直径获取模块中,根据列车瞬时速度,结合车轮通过时的时刻,得到激光打在车轮上的弦长,从而计算得到车轮直径。
下面结合具体实施例对本发明做进一步详细说明
实施例
结合图3和图4,在轨道内侧依次安装四个激光发射装置,发射装置位置距离轨道内侧为0.45m,角度α为36°,实测激光发射装置S1、S2的激光束之间的距离L1为1.202m。S1的光斑在内侧面的高度H1=215mm,S2的光斑在内侧面的高度H2=213mm,车轮的轮缘高为已知,h=29.3mm。
根据步骤3的方法,规定车速为5km/h通过设备,通过设备可以得到列车的时间序列。取其中一个序列进行计算演示:t1=1.076s;t2=1.644s;t3=1.942s;t4=2.508s。
根据步骤4中方法,结合L的数值,计算得到列车的瞬时速度为:
根据步骤5中方法,将步骤3中测得的列车的速度带入半径计算公式,可以测得该车轮的轮缘顶点圆直径为881.1878mm,车轮直径为822.5878mm。本次计算的车轮直径的人工测量值为822.6mm,可见该方法能有效准确的测量车轮直径。
一种列车车轮直径检测的方法及其系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
















动态评分
0.0