






专利摘要
本发明公开了一种六自由度水下机器人,包括壳体,壳体上设置有主姿态调整推进组、主动力推进组和辅助姿态调整组,三者均包括姿态调整装置,所述姿态调整装置包括导流罩、电机座、电机和螺旋桨;主姿态调整推进组的三个导流罩呈等腰三角形布置且三者的中心线均平行于Z轴,并且其中的两个导流罩的中心线所形成的平面平行于Y轴,而另一个导流罩到这两个导流罩的距离相等;主动力推进组的两个导流罩的中心线均平行于X轴,且这两个导流罩的中心线所形成的平面平行于Y轴;辅助姿态调整组的导流罩的中心线平行于Y轴。本发明采用六个姿态调整装置进行推进,以实现水下机器人在运动空间内的六自由度运动。
权利要求
1.一种六自由度水下机器人,包括壳体,所述壳体上设置有主姿态调整推进组、主动力推进组和辅助姿态调整组,所述主姿态调整推进组包括三个姿态调整装置,所述主动力推进组包括两个姿态调整装置,所述辅助姿态调整组包括一个姿态调整装置,其特征在于:
每个姿态调整装置均包括导流罩、电机座、电机和螺旋桨,并且所述导流罩和所述电机座均固定安装在所述壳体上,所述导流罩呈圆筒状,所述电机安装在所述电机座上,所述电机的输出轴与所述螺旋桨固定连接以用于驱动所述螺旋桨转动,所述螺旋桨位于所述导流罩内,所述螺旋桨的转动能带动所述壳体移动;
其中,所述主姿态调整推进组的三个导流罩呈等腰三角形布置且三者的中心线均平行于Z轴,并且其中的两个导流罩的中心线所在的平面平行于Y轴,而另一个导流罩到这两个导流罩的距离相等;
所述主动力推进组的两个导流罩的中心线均平行于X轴,并且这两个导流罩的中心线所在的平面平行于Y轴;
所述辅助姿态调整组的导流罩的中心线平行于Y轴。
2.根据权利要求1所述的一种六自由度水下机器人,其特征在于:所述壳体上设置有仪器舱,所述仪器舱内设置有传感器、驱动器和控制器,所述传感器用于检测壳体的转动角度并传送给控制器,所述控制器用于控制电机的转动。
3.根据权利要求1所述的一种六自由度水下机器人,其特征在于:所述辅助姿态调整组安装在壳体的一侧壁上,在壳体的另一与此侧壁相对的侧壁上安装有电池仓,所述电池仓内安装有电池,所述辅助姿态调整组和电池沿Y轴设置,以用于平衡壳体在Y轴方向上的重量。
4.根据权利要求3所述的一种六自由度水下机器人,其特征在于:所述电机为无刷直流电机,所述无刷直流电机通过电池仓内的电池供电。
5.根据权利要求1所述的一种六自由度水下机器人,其特征在于:所述主姿态调整推进组的三个电机座通过一支撑杆固定连接在一起,所述支撑杆平行于Z轴设置,所述支撑杆远离电机座的一端固定连接在所述壳体上。
6.根据权利要求1所述的一种六自由度水下机器人,其特征在于:所述壳体为工程塑料或亚克力制成。
说明书
技术领域
本发明属于机器人领域,更具体地,涉及一种六自由度水下机器人。
背景技术
水下机器人作为人类探测和开发海洋的重要工具,已经被广泛应用于海岸警戒与防卫、海洋油气资源开发、海洋工程建设、海洋渔业管理、海洋旅游资源开发、海岛保护与开发、海洋突发事件应急处理等重要领域。
水下机器人的研究始于20世纪三十年代,得益于流体力学、机器人学、传感技术、新型材料科学、计算机以及智能控制技术的快速发展,水下机器人最终走出实验室,实现真正意义上的水下应用。水下机器人是一个完整的装备系统,涉及多个学科与技术。水下机器人的设计包括机器人机械结构、流体外形、推进器动力布置、能源、通信传输以及动力控制等诸多技术领域。
目前国内在深水大型载人潜水器技术领域处于国际领先水平,在浅水应用领域的水下机器人技术领域的研究则相对较少,技术落后。然而,全球大部分海洋资源蕴藏在水深不超过200m的大陆架,海岸防卫、水下娱乐、核设施检查等相关应用都集中在浅水水域。国内应用浅水水域的水下机器人大部分依赖进口,其价格昂贵,损坏后难以进行维修,缺乏具有自主知识产权的关键技术。因此,设计并开发一种适用于浅水水域的水下机器人具有重要应用价值。
发明内容
针对现有技术的以上缺陷或改进需求,本发明提供了一种六自由度水下机器人,通过调节选择的螺旋桨进行旋转以及调整螺旋桨的旋转方向,机器人能够沿X轴、Y轴或Z轴的移动,并能绕平行于X轴、Y轴或Z轴的轴旋转,以实现六个自由度运动,特别适合在浅水中工作。
为实现上述目的,按照本发明,提供了一种六自由度水下机器人,包括壳体,所述壳体上设置有主姿态调整推进组、主动力推进组和辅助姿态调整组,所述主姿态调整推进组包括三个姿态调整装置,所述主动力推进组包括两个姿态调整装置,所述辅助姿态调整组包括一个姿态调整装置,其特征在于:
每个姿态调整装置均包括导流罩、电机座、电机和螺旋桨,并且所述导流罩和所述电机座均固定安装在所述壳体上,所述导流罩呈圆筒状,所述电机安装在所述电机座上,所述电机的输出轴与所述螺旋桨固定连接以用于驱动所述螺旋桨转动,所述螺旋桨位于所述导流罩内,所述螺旋桨的转动能带动所述壳体移动;
其中,所述主姿态调整推进组的三个导流罩呈等腰三角形布置且三者的中心线均平行于Z轴,并且其中的两个导流罩的中心线所在的平面平行于Y轴,而另一个导流罩到这两个导流罩的距离相等;
所述主动力推进组的两个导流罩的中心线均平行于X轴,并且这两个导流罩的中心线所在的平面平行于Y轴;
所述辅助姿态调整组的导流罩的中心线平行于Y轴。
优选地,所述壳体上设置有仪器舱,所述仪器舱内设置有传感器、驱动器和控制器,所述传感器用于检测壳体的转动角度并传送给控制器,所述控制器用于控制电机的转动。
优选地,所述辅助姿态调整组安装在壳体的一侧壁上,在壳体的另一与此侧壁相对的侧壁上安装有电池仓,所述电池仓内安装有电池,所述辅助姿态调整组和电池沿Y轴设置,以用于平衡壳体在Y轴方向上的重量。
优选地,所述电机为无刷直流电机,所述无刷直流电机通过电池仓内的电池供电。
优选地,所述主姿态调整推进组的三个电机座通过一支撑杆固定连接在一起,所述支撑杆平行于Z轴设置,所述支撑杆远离电机座的一端固定连接在所述壳体上。
优选地,所述壳体为工程塑料或亚克力制成。
总体而言,通过本发明所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
(1)本发明采用六个姿态调整装置进行推进,以实现水下机器人在运动空间内的六自由度运动,其中六个姿态调整装置在水下机器人中的布置采用了独特的“3+2+1”布置形式,即主姿态调整推进组的三个姿态调整装置,主动力推进组的两个姿态调整装置,辅助姿态调整组的一个姿态调整装置,通过控制螺旋桨的转动,可以方便地实现水下机器人沿X轴、Y轴和Z轴的平移,以及绕平行于X轴、Y轴和Z轴的轴的转动;
(2)本发明采用无刷直流电机加螺旋桨以及导流罩的方式组成了开放式组合水下推进器,相对于市面上的专用水下推进器而言,本发明所采用的开放式组合推进器控制更为简单,只需采用与电机配套的电子调速器即可控制推进器转速,控制稳定,易于实现,不需要额外配置专用驱动电路,降低了水下机器人的控制复杂度;
(3)本发明采用工程塑料或亚克力等非金属材料制作水下机器人机械结构,在满足浅水水域耐压强度的基础上,能够有效降低水下机器人重量,增加水下机器人的运动灵活性和续航能力;
(4)本发明采用自带电池对进行供电,无需额外提供水面动力,增加了水下机器人的灵活性和自主性。
附图说明
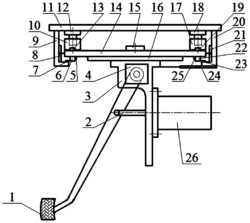
图1为本发明的结构示意图;
图2为本发明中壳体的结构示意图;
图3为本发明中仪器舱的结构示意图;
图4为本发明中主姿态调整推进组的结构示意图;
图5为本发明中左上推进装置的结构示意图;
图6为本发明的工作原理示意图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
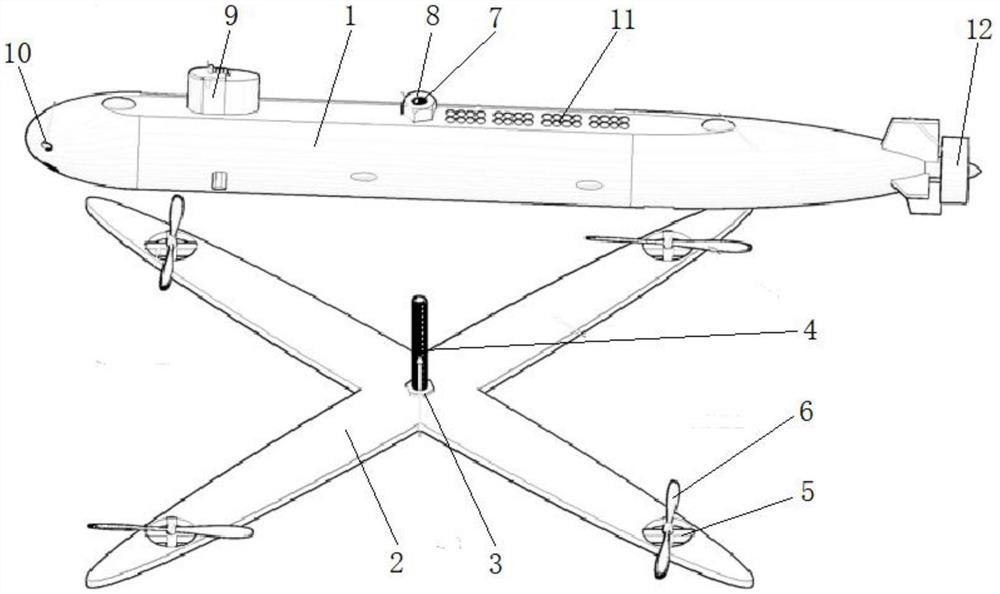
如图1~图6所示,一种六自由度水下机器人,包括壳体100;优选地,所述壳体100为工程塑料或亚克力制成,以降低整个机器人的重量;所述壳体100上设置有主姿态调整推进组400、主动力推进组和辅助姿态调整组500,所述主姿态调整推进组400包括三个姿态调整装置,所述主动力推进组包括两个姿态调整装置,所述辅助姿态调整组500包括一个姿态调整装置;
每个姿态调整装置包括导流罩、电机座、电机和螺旋桨,并且所述导流罩和所述电机座均固定安装在壳体100上,所述导流罩呈圆筒状,所述电机安装在所述电机座上,所述电机的输出轴与所述螺旋桨固定连接以用于驱动所述螺旋桨转动,所述螺旋桨位于所述导流罩内,所述螺旋桨的转动能带动所述壳体移动;其中,
所述主姿态调整推进组400的三个导流罩呈等腰三角形布置且三者的中心线均平行于Z轴,并且其中的两个导流罩的中心线所形成的平面平行于Y轴,而另一个导流罩到这两个导流罩的距离相等;
所述主动力推进组的两个导流罩的中心线均平行于X轴,并且这两个导流罩的中心线所形成的平面平行于Y轴;
所述辅助姿态调整组500的导流罩的中心线平行于Y轴;
上文所述的X轴、Y轴和Z轴是笛卡尔坐标系中的三个坐标轴,X轴和Y轴均水平设置且二者相互垂直,X轴沿前后方向设置,Y轴沿左右方向设置,Z轴沿上下方向设置。
优选地,所述壳体100上设置有仪器舱300,所述仪器舱300内设置有传感器、驱动器和控制器,所述传感器用于检测壳体的转动角度并传送给控制器,所述控制器用于控制电机的转动。
进一步,所述辅助姿态调整组500安装在壳体100的一侧壁上,在壳体100的另一与此侧壁相对的侧壁上安装有电池仓200,所述电池仓200内安装有电池,以用于平衡壳体沿Y轴方向的重量,使机器人在移动时不容易倾倒。
进一步,所述电机为无刷直流电机,所述无刷直流电机通过电池仓200内的电池供电。采用自带电池对进行供电,无需额外提供水面动力,增加了水下机器人的灵活性和自主性。
进一步,所述主姿态调整推进组400的三个电机座通过一支撑杆420固定连接在一起,所述支撑杆420平行于Z轴设置,所述支撑杆远离电机座的一端固定连接在壳体100上,这样可以保持这三个电机座的刚度,使三个电机座更加稳定。
如图2所示,所述壳体100包括上板110,左板120,右板130,下板140,左下支撑架150和右下支撑架160;
所述上板110前部、右后部、左后部、中部分别有通孔前上孔111,右后孔112,左后孔113和中孔114;
所述左板120的中部有左孔121,下后部有左下后孔122,固接于所述上板110的左部;
所述右板130的下后部有右下后孔131固接于所述上板110的右部;
所述下板140为窄长条形板状件,左端固接于左板120的前下部,右端固接于右板130的前下部;
所述左下支架150固接于所述左板120的前下部和所述下板140的左端部,中部有左下孔151;所述右下支架160固接于所述右板130的前下部和所述下板140的右端部,中部有右下孔161;
如图1所示,所述电池舱200为箱体零件,安装在壳体100的右板130的前上部,便于安放电池,电池和辅助姿态调整组500沿Y轴布置,以用于平衡机器人沿Y轴方向的稳定性;
如图3所示,所述仪器舱300包括舱体310,左舱盖321和右舱盖322;所述舱体310为筒状件,便于安放传感器、驱动器、控制器等,舱体310左右两端分别由左舱盖321和右舱盖322封闭;所述左舱盖321和所述右舱盖322分别穿过所述左板120的左下后孔122和所述右板130的右下后孔131;
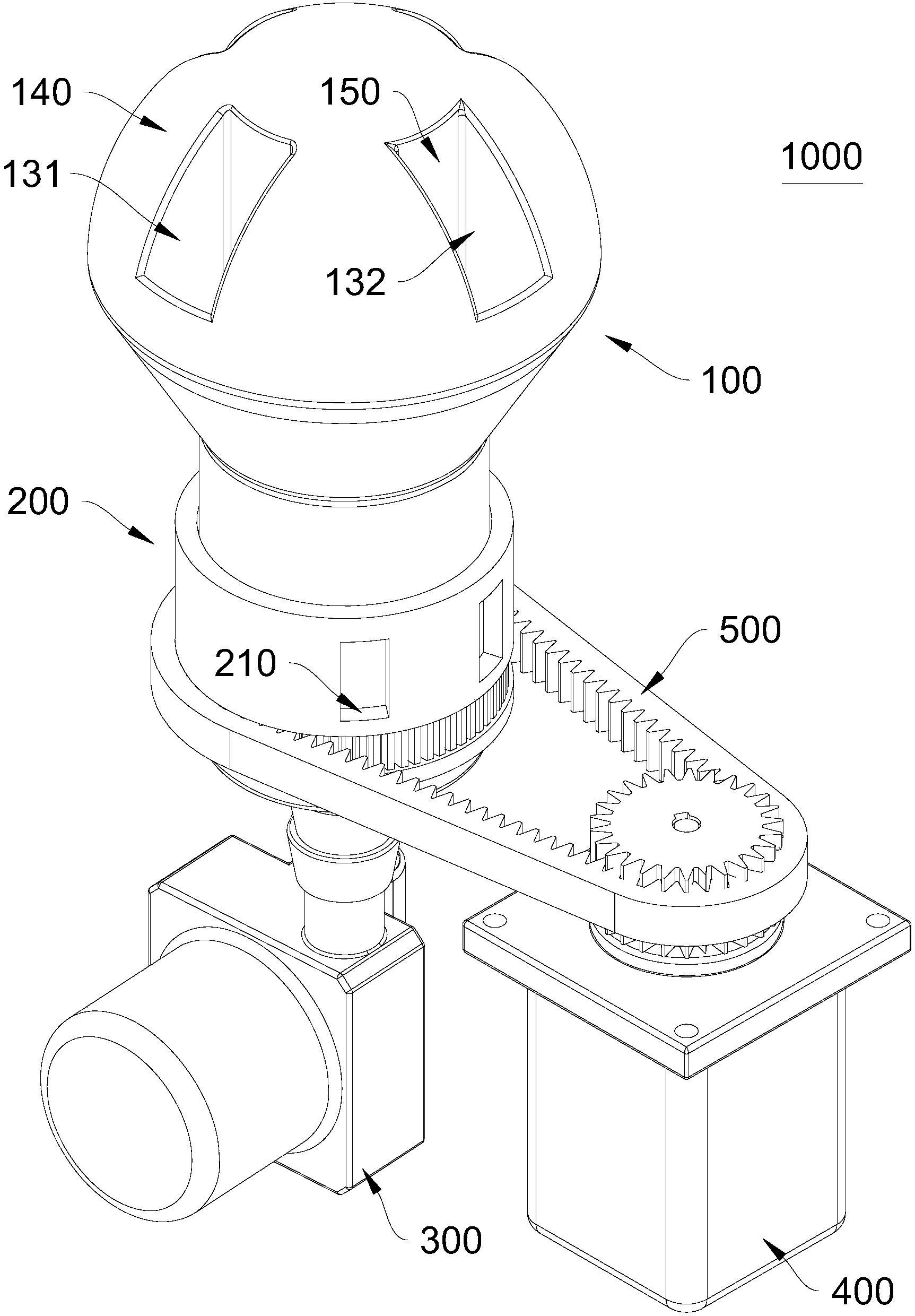
如图4所示,所述主姿态调整推进组400包括支撑盖410,支撑杆420,三个姿态调整装置,三个姿态调整装置分别为前上姿态调整装置440,右后上姿态调整装置450和左后上姿态调整装置460;支撑杆420通过支撑盖410安装在壳体100的内上表面。
所述前上姿态调整装置440包括前上电机441,前上螺旋桨442,前上导流罩443;所述前上电机441安装于所述上电机座430的前部;所述上电机座430安装于所述支撑杆420的下端部;所述支撑杆420的上端部通过所述支撑盖410与所述上板110固接,所述前上螺旋桨442安装于所述前上导游罩443内,并与所述前上电机441的输出端相连;
所述右后上姿态调整装置450、左后上姿态调整装置460均与所述前上姿态调整装置440具有相同结构;
所述上电机座430与所述支撑杆420固接;所述支撑杆420通过所述支撑盖410固接于所述上板110的中孔114内;
如图5所示,所述辅姿态调整推进组500包括左上电机座510,左上电机520,左上螺旋桨530,左上导流罩540;所述左上电机座510固接于所述上板110的左下部;所述左上导流罩540嵌于所述左板120的左孔121内;所述左上电机520安装于所述左上电机座510的端部;所述左上螺旋桨530安装于所述左上电机520的输出轴上;所述左上螺旋桨530安装于所述导流罩540内;
所述主动力推进组的两个姿态调整装置分别为左下姿态调整装置610和右下姿态调整装置620;
所述左下姿态调整装置610的左下电机座安装在壳体100左板的前下部,左下导流罩嵌在左下支撑架150内孔,所述右下姿态调整装置620的右下电机座安装在壳体100右板的前下部,右下导流罩嵌在右下支撑架160内孔;
图6所示为本发明的驱动原理。通过各推进装置的电机的正反转可使得各螺旋桨具有与图示方向相同或相反的排水速度。V1、V2和V3分别是左后上推进组460、右后上推进组450和前上推进组440的速度,V4是辅姿态调整推进组500的速度,V5和V6分别是每个主动力推进组的速度。
机器人六个自由度的具体实现方式如下:
主动力推进组的左下姿态调整装置610和右下姿态调整装置620相互配合实现机器人的前进、后退和绕平行于Z轴的轴线的转动;当V5和V6大小相等方向相同时,机器人沿X轴移动,即前进或后退;当V5和V6大小相等且方向相反时,机器人绕平行于Z轴的轴线转动;
主姿态调整推进组400的前上姿态调整装置440,右后上姿态调整装置450和左后上姿态调整装置460相互配合实现机器人的上升、下降、绕平行于X轴的轴线转动及绕平行于Y轴的轴线转动;当V1、V2、V3大小相等且方向相同时,机器人沿Z轴移动,即上升或下降;当V2和V3大小相等、方向相同、V1不等于0且与V2方向相反时,机器人绕平行于Y轴的轴线旋转;当V2和V3大小相等方向相反且V1等于0时,机器人绕平行于X轴的轴线旋转;
辅姿态调整推进组500负责提供机器人沿Y轴侧向移动的动力。
上述例子之外的螺旋桨排水速度组合,能使机器人产生其它复合运动。
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
一种六自由度水下机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0