








专利摘要
本发明涉及纳米材料加工技术领域,具体涉及一种超声振动刻蚀器及纳米加工系统。超声振动刻蚀器包括底座、柱体、致动机构和悬臂单元,所述柱体竖直设置在所述底座上,所述悬臂单元设置在所述柱体顶端的上方,所述悬臂单元用于对放置在所述柱体顶端的工件进行加工;所述致动机构与所述柱体相连,用于控制所述悬臂单元的移动并产生超声波振动。纳米加工系统包括:超声振动刻蚀器、AFM扫描模块、信号接入模块和数据采集处理器。有益效果:本发明具备高速度、可调节的特点,尺寸修正灵活性,在控制线宽的能力以及对于高效率制造复杂图案非常有效。在加工过程中,本发明有效地降低了对沟槽的影响、图案等加工特征的均匀性。
权利要求
1.一种超声振动刻蚀器,其特征在于,包括底座、柱体、致动机构和悬臂单元,所述柱体竖直设置在所述底座上,所述悬臂单元设置在所述柱体顶端的上方;所述致动机构与所述柱体相连,用于控制所述悬臂单元的移动,以及产生超声波振动;
所述悬臂单元包括AFM悬臂和热台夹具,所述热台夹具设置在所述柱体的上方,所述热台夹具的端部与所述AFM悬臂连接,AFM悬臂与所述柱体顶端相对。
2.根据权利要求1所述的超声振动刻蚀器,其特征在于,所述致动机构包括相互配合的X向压电致动器、Y向压电致动器和Z向压电致动器;X向压电致动器和Y向压电致动器相互垂直地设置于所述底座的表面,且所述X向压电致动器的一端和Y向压电致动器的一端均与所述柱体的底部连接;所述Z向压电致动器设置于所述柱体的顶部并与所述悬臂单元相对应。
3.根据权利要求1所述的超声振动刻蚀器,其特征在于,所述热台夹具包括两个夹片和一个固定架,所述AFM悬臂通过两个夹片进行固定。
4.根据权利要求3所述的超声振动刻蚀器,其特征在于,所述夹片包括冷臂和热臂,所述冷臂和热臂在加工过程中因温度变化产生偏转。
5.根据权利要求4所述的超声振动刻蚀器,其特征在于,所述热臂的长度为500um。
6.根据权利要求2所述的超声振动刻蚀器,其特征在于,还包括与所述Z向压电致动器连接的功能波形发生器,用于配合所述Z向压电致动器形成Z方向的超声振动,并产生激励信号来触发悬臂单元运动。
7.一种纳米加工系统,其特征在于,包括权利要求1-6任一项所述的超声振动刻蚀器、AFM扫描模块、信号接入模块和数据采集处理器;
所述AFM扫描模块与所述超声振动刻蚀器连接,用于采集超声振动刻蚀器加工过程中的实时数据;
所述信号接入模块与所述AFM扫描模块及所述数据采集处理器连接,用于将所述AFM扫描模块采集的实时数据传递至所述数据采集处理器;
所述数据采集处理器与所述超声振动刻蚀器连接,用于接收并处理所述信号接入模块发送的实时数据,并根据处理结果向所述超声振动刻蚀器发送相应的控制指令,所述超声振动刻蚀器根据所述控制指令调节加工参数。
8.根据权利要求7所述的纳米加工系统,其特征在于,所述信号接入模块用于获取悬臂单元垂直及横向的偏转信号。
9.根据权利要求7所述的纳米加工系统,其特征在于,所述数据采集处理器用于向所述超声振动刻蚀器发送X向及Y方向的振动驱动信号,并用于对加工过程中的输出信号控制、反馈信号采集和基本信号处理,以及信号发送和切割力数据的采集。
说明书
技术领域
本发明涉及纳米材料加工技术领域,具体涉及一种超声振动刻蚀器及纳米加工系统。
背景技术
纳米加工技术广泛应用于场效应晶体管、量子点、纳米线、光栅、纳机电系统以及半导体集成电路等制造领域。扫描探针纳米加工技术是一种利用扫描探针在纳米尺度上图案化材料的平版印刷方法,与其他纳米加工技术相比,扫描探针刻蚀无疑是一种低成本高质量的方法,它可绕过衍射极限,达到10nm以下的分辨率;可实现原子尺度上的控制与反馈。基于尖端的纳米加工(TBN)是扫描探针纳米加工技术中快速增长的方案之一,它以物理探针为基础,使用热场、机械场或电场来对样本表面进行刻蚀。目前,基于尖端的纳米加工主要方法有直接机械刮擦、原子去除法、浸笔纳米刻蚀法、热化学纳米平版印刷术、电化学方法以及场发射方法等。可以成功地制作精度小于50nm的图案。
然而,直接机械刮擦在制造速度和性能方面受到限制。一般来说,需要较大的法向力和非常坚硬的悬臂来将尖端推入样品表面。大的法向力导致大的摩擦力和潜在的尖端磨损,这会影响纳米制造中使用的悬臂尖端的寿命。在直接的机械刮擦中,锋利尖端和样品之间的接合难以控制。悬臂尖端和样品之间较大的相互作用力限制了这种方法的最大加工速度。
也有一些研究者采用基于尖端振动的方法,如动态犁削刻蚀。但在这种方法中,悬臂在其共振频率附近振动,这使得动态犁削刻蚀的操作和控制相当复杂。尖端-样品之间强大的相互作用力限制了对加工过程的调节。在悬臂的共振频率附近,悬臂振荡的行为对控制系统的尖端-样品间隙和设定力非常敏感,会影响沟槽、图案等加工特征的均匀性。
除了上述不足外,大多数其他基于AFM的纳米加工还存在另一个问题,就是缺乏对加工特征尺寸的灵活修改能力。与电子束刻蚀技术不同,机械刮擦和犁削的线宽主要取决于AFM尖端尺寸,按需求控制线宽的能力对于高效率制造复杂图案非常重要。
当前各种纳米加工方法面临着亟待解决的共性问题,即同时具备高速度、可调节与尺寸修正灵活性。因此,现有的加工技术需要改进和发展。
发明内容
本发明的目的是为了解决上述问题,提供了一种超声振动刻蚀器及纳米加工系统,其基于原子力显微镜的高速可调超声波。本发明的振动刻蚀器在高速工作过程中可通过调节加工深度与宽度,增加制造过程的可控性,提高材料去除速率,从而为降低了制造纳米结构的成本。
为了达到上述发明目的,本发明采用以下技术方案:
一种超声振动刻蚀器,包括底座、柱体、致动机构和悬臂单元,所述柱体竖直设置在所述底座上,所述悬臂单元设置在所述柱体顶端的上方,所述悬臂单元用于对放置在所述柱体顶端的工件进行加工;所述致动机构与所述柱体相连,用于控制所述悬臂单元的移动并产生超声波振动。
优选的,所述致动机构包括相互配合的X向压电致动器、Y向压电致动器和Z向压电致动器;X向压电致动器和Y向压电致动器相互垂直地设置于所述底座的表面,且所述X向压电致动器的一端和Y向压电致动器的一端均与所述柱体的底部连接;所述Z向压电致动器设置于所述柱体的顶部并与所述悬臂单元相对应。
优选的,所述悬臂单元包括AFM悬臂和热台夹具,所述热台夹具设置在所述柱体的上方,所述热台夹具的端部与所述AFM悬臂连接,AFM悬臂与所述柱体顶端相对。
优选的,所述热台夹具包括两个夹片和一个固定架,所述AFM悬臂通过两个夹片进行固定。
优选的,所述夹片包括冷臂和热臂,所述冷臂和热臂在加工过程中因温度变化产生偏转。在加工过程中因温度变化产生偏转的最大偏转距离为23μm,最大承受压力为1GPa。
优选的,所述热臂的长度为500um。
优选的,还包括与所述Z向压电致动器的连接的功能波形发生器,用于配合所述Z向压电致动器形成Z方向的超速波振动,并产生激励信号来触发悬臂单元运动。所述柱体顶端设有Z向压电致动器与所述功能波形发生器相连,在Z方向上提供兆赫级超声波振动
一种纳米加工系统,包括上述任一项所述的超声振动刻蚀器,还包括:AFM扫描模块、信号接入模块和数据采集处理器;所述AFM扫描模块与所述超声振动刻蚀器连接,用于采集超声振动刻蚀器加工过程中的实时数据;所述信号接入模块与所述AFM扫描模块及所述数据采集处理器连接,用于将所述AFM扫描模块采集的实时数据传递至所述数据采集处理器;所述数据采集处理器与所述超声振动刻蚀器连接,用于接收并处理所述信号接入模块发送的实时数据,并根据处理结果向所述超声振动刻蚀器发送相应的控制指令,所述超声振动刻蚀器根据所述控制指令调节加工参数。
优选的,所述信号接入模块用于获取悬臂单元垂直及横向的偏转信号。
优选的,所述数据采集处理器用于向所述超声振动刻蚀器发送X向及Y方向的振动驱动信号,用于对加工过程中的输出信号控制、反馈信号采集和基本信号处理,以及信号发送和切割力数据的采集。
本发明与现有技术相比,有益效果是:通过本发明的超声振动刻蚀器,解决了一般的加工设备通过直接的机械刮擦,使锋利的尖端和样品之间的接合难以控制,以及因存在较大的相互作用力限制了最大加工速度的问题。通过本发明的超声振动刻蚀器及纳米加工系统可以使产品加工同时具备高速度、可调节的特点,尺寸修正灵活性,在控制线宽的能力以及对于高效率制造复杂图案非常有效。在加工过程中,本发明有效地降低了对沟槽的影响、图案等加工特征的均匀性。
附图说明
图1是本发明的超声振动刻蚀器的结构示意图;
图2是本发明的悬臂单元结构示意图;
图3是本发明的夹片结构示意图;
图4(a)是本发明的刻蚀工作原理示意图;
图4(b)是本发明的AFM悬臂跟随样本振动的示意图;
图4(c)是本发明的AFM悬臂尖端呈周期性接触相和脱离相示意图;
图5是本发明的基于原子力显微镜的高速可调超声波纳米加工系统结构示意图;
图6是本发明的基于原子力显微镜的高速可调超声波纳米刻蚀加工流程图。
图中:
1 底座
2 柱体
3 致动机构
31 X向压电致动器
32 Y向压电致动器
33 Z向压电致动器
4 悬臂单元
41 AFM悬臂
42 热台夹具
421 夹片
4211 热臂
4212 冷臂
422 固定架
5 AFM扫描模块
6 信号接入模块
7 数据采集处理器
具体实施方式
下面通过具体实施例对本发明的技术方案作进一步描述说明。
如果无特殊说明,本发明的实施例中所采用的原料均为本领域常用的原料,实施例中所采用的方法,均为本领域的常规方法。
本实施例如图1所示:一种超声振动刻蚀器,包括底座1、柱体2、致动机构3和悬臂单元4,所述柱体2竖直设置在所述底座1的中间位置,所述悬臂单元4设置在所述柱体2顶端的上方,所述悬臂单元4用于对放置在所述柱体2顶端的工件进行加工;所述致动机构3与所述柱体2相连,用于控制所述悬臂单元4的移动,以及产生超声波振动。
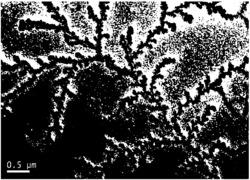
所述底座1由铝材制成,可承受高于10KHz的振动,柱体2位于台体中央,柱体2尺寸为6mm×6mm×15mm,以规范XY面上的圆周振动范围。所述超声振动刻蚀器在PMMA掩膜上进行振动辅助纳米加工,先将PMMA旋涂在硅衬底上并在电热板上烘烤,PMMA是热塑性合成聚合物,杨氏模量和剪切模量分别为1800-3100Mpa和1700Mpa。
所述致动机构3包括相互配合的X向压电致动器31、Y向压电致动器32和Z向压电致动器33;X向压电致动器31和Y向压电致动器32相互垂直地设置于所述底座1的表面,且所述X向压电致动器31的一端和Y向压电致动器32的一端均与所述柱体2的底部连接;所述Z向压电致动器33设置于所述柱体2的顶端并与所述悬臂单元4相对应。本实施例还包括与所述Z向压电致动器33连接的功能波形发生器(图上未示出),用于配合所述Z向压电致动器33形成Z方向的超速波振动,并产生激励信号来触发悬臂单元4运动。
三个压电致动器产生激励信号触发悬臂进入力-距离曲线的非线性区域,从而产生切割力;表面涂覆PMMA的硅晶片样本贴合放置在Z向压电致动器33的顶部,由悬臂单元4上的AFM悬臂41进行加工。
如图2、图3所示:所述悬臂单元4包括AFM悬臂41和热台夹具42,所述热台夹具42设置在所述柱体2的上方,所述热台夹具42的端部与所述AFM悬臂41连接,AFM悬臂41与所述柱体2顶端相对。使用的AFM悬臂41为DLC190,尖端半径约30nm。热台夹具42由多晶硅制成,固定在所述柱体2上方。热台夹具42的端部的夹片421与AFM悬臂41的尖端(刀尖)相连。热台夹具42还包括热执行器,在工作过程中,每个热执行器在夹紧过程中的执行器挠度为20um。
AFM悬臂41采用攻丝模式在工件表面成像。通过所述超声振动刻蚀器的Z向压电致动器33在样本与AFM悬臂41的尖端之间产生非线性力-距离作用而形成超声振动,进而产生超声波,以调节加工深度,并降低摩擦;同时,因X向压电致动器31和Y向压电致动器32在AFM悬臂41的尖端和样本之间产生高频圆形振动以控制加工宽度,并提高加工的速度。悬臂在工件表面以圆形振动模式进行加工。圆形路径的外缘为具有单个切削齿的虚拟刀具,通过它切除加工材料。其中虚拟刀具的直径由XY平面上的圆形振幅所控制,虚拟刀具的旋转通过尖端圆周运动实现,有效切割刃为虚拟刀具与样本间的虚拟切线。
所述热台夹具42包括上下两个夹片421和一个固定架422,夹片421由硅材料制成。所述AFM悬臂41通过两个夹片421进行固定。所述夹片421包括冷臂4212和热臂4211,所述冷臂4212和热臂4211在加工过程中因温度变化产生偏转。本实施例中,热臂4211的长度L=500um,夹片421所需的偏转x=30um。
本发明通过对AFM悬臂41的尖端下垂效果进行了测试。对于20微米扭力杆,在杨氏模量为300Gpa,屈服强度为7Gpa的条件下,若硅密度为2.02g/cm3,负荷为2.02e-5N/mm3,最大下垂位移为18nm;若桁架结构改变,硅密度为1.165g/cm3,负荷为1.165e-5N/mm3最大下垂位移为10nm。由此可反映出本发明采用的材料及系统设置适当。
如图4(a)所示,工作时,样本与悬臂尖端之间因非线性力-距离作用而形成超声振动,进而产生超声波,以调节加工深度,并降低摩擦;同时,在刀尖和样本之间引入高频圆形振动以控制加工宽度,并提高刻蚀的速度。
当悬臂尖端与振动样本表面接触时,AFM探针扫描器检测二者之间Z方向上的超声波力。如图4(b)所示,当样本与悬臂接触并以低于悬臂梁共振频率fr(f<fr)的频率f振动时,悬臂梁将跟随样本振动;当振动频率远高于悬臂梁共振频率(f>>fr)时,悬臂梁因惯性作用而无法继续跟随样本振动,端部随即压入样本表面。当振幅A>Zc时,其中Zc是悬臂的初始挠度,在一个振动圆周上,触头发生接触相和脱离相。如图4(c)所示,当振幅A>Zc时(Zc为悬臂初始挠度),触头呈周期性接触相和脱离相。
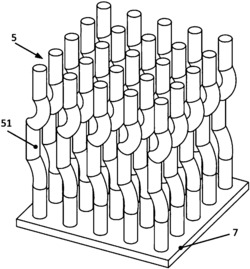
如图5所示,本发明还提供了一种基于原子力显微镜的高速可调超声波的纳米加工系统,包括所述的超声振动刻蚀器,还包括:AFM扫描模块5、信号接入模块6和数据采集处理器7。所述AFM扫描模块5与所述超声振动刻蚀器连接,用于采集超声振动刻蚀器加工过程中的实时数据,本实施例中所述AFM扫描模块5为AFM探针扫描器。所述信号接入模块6与所述AFM扫描模块5及所述数据采集处理器7连接,用于将所述AFM扫描模块5采集的实时数据传递至所述数据采集处理器7;所述数据采集处理器7与所述超声振动刻蚀器连接,数据采集处理器7用于接收并处理所述信号接入模块6发送的实时数据,并根据处理结果向所述超声振动刻蚀器发送相应的控制指令,所述超声振动刻蚀器根据所述控制指令调节加工参数。
所述数据采集处理器7用于在labVIEW环境下处理加工数据,并产生90°相位差的两个正弦波信号。所述超声振动刻蚀器用于根据所述数据采集处理器7的输出的控制指令控制三个压电致动器的电压调节振动幅度,进而控制AFM悬臂41偏转,调整刻蚀深度与宽度。
具体为,所述X向压电致动器31、Y向压电致动器32均与数据采集处理器7相连,由数据采集处理器7发出的指令信号通过功率放大器后到达X向压电致动器31、Y向压电致动器32,在柱体2顶端形成振动和位移。X向压电致动器31和Y向压电致动器32接收指令电压,通过产生的致动力提供XY平面中的旋转振动,在柱体2顶端形成振动和位移,位移范围在亚纳米到几微米之间。
Z向压电致动器33与功能波形发生器连接,通过接收数据采集处理器7发出的指令,形成Z方向的超声波振动,产生激励信号来触发AFM悬臂41进入力-距离曲线的非线性区域;超声振动刻蚀器底座1拧紧在AFM探针扫描器上,由AFM探针扫描器采集加工数据,并传导给数据采集处理器7,以对加工过程进行控制。超声振动刻蚀器对旋涂了PMMA掩膜的硅晶片进行纳米级加工,并通过接收数据采集处理器7发出的指令实时调整加工特征及速度。
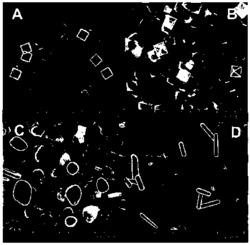
所述信号接入模块6还用于获取悬臂单元4垂直及横向的偏转信号。当AFM悬臂41在垂直方向上弯曲时,工件表面的形貌由光电探测器测量为A-B信号;反映AFM尖端和工件表面之间摩擦的AFM悬臂41的扭转运动被测量为C-D信号。所述超声振动刻蚀器工作时涉及AFM悬臂41的垂直和横向运动,因此所述信号接入模块6同时采集A-B和C-D电压信号。
所述数据采集处理器7用于向所述超声振动刻蚀器发送X向及Y方向的振动驱动信号,用于对加工过程中的输出信号控制、反馈信号采集和基本信号处理,以及信号发送和切割力数据的采集。
所述数据采集处理器7产生所述超声振动刻蚀器的XY方向振动驱动信号。它包括4个模拟输出和16个模拟输入通道,采样率可设定为1.25MS/s,并对加工过程中的输出信号控制、反馈信号采集和基本信号处理。在所述基于原子力显微镜的高速可调超声波纳米加工系统中,所述数据采集处理器7用于信号发生和切割力数据采集。模拟量输出通道1产生2kHz的指令信号驱动y轴,模拟量输出通道2产生2kHz的指令信号驱动X轴振动,二者相位差为90°。
本发明的刻蚀过程由悬臂尖端在旋涂了PMMA掩膜的硅晶片上做圆周振动而实现。XY方向的压电致动器控制加工的宽度,Z致动器控制尖端的压下与提起,控制加工的深度。
如图6所示,所述的基于原子力显微镜的高速可调超声波纳米加工设备对应的流程具体包括以下步骤:
步骤S1、对硅晶片进行处理,包括清洗、脱水、铝沉积、旋涂PMMA膜等;
步骤S2、由数据采集处理器7按设定点力、进给速度、加工深度与宽度向垂直方向上的两个压电致动器发送90°相位差的正弦信号;
步骤S3、垂直方向上的Z型致动器接收到数据采集处理器7发出的指令后,在样本与悬臂尖端之间产生非线性力-距离作用而形成超声振动,控制尖端压入或脱离硅晶片表面;
步骤S4、X向压电致动器31和Y向压电致动器32接收数据采集处理器7发出的指令后,产生XY平面内的圆形振动,并将此高频圆形振动加载到硅晶片上;在每个旋转周期中,只有虚拟刀具与样本相切部分的微薄材料被去除;
步骤S5、加工过程中的A-B和C-D数据通过AFM探针扫描器收集,由信号接入模块6传导到数据采集处理器7,并在LabVIEW环境下处理,并将反馈调整数据通过压电指令传递给XYZ三个压电致动器,控制悬臂的偏转,实现对宽度和深度的调整。
步骤S6、完成PMMA膜上成像后,将样本置于O2等离子体(PM-600)中进行PMMA刻蚀,再将样本浸入铝刻蚀剂中,令图案从PMMA膜转移至铝层上,然后用去离子水和氮气吹干,最后清洗成像。
应当理解的是,本发明的应用不限于上述的举例,对本领域技术人员来说,可以根据上述说明加以改进或变换,所有这些改进或变换都应属于本发明所述权利要求的保护范围。
一种超声振动刻蚀器及纳米加工系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。



















动态评分
0.0