







专利摘要
一种惯导系统传递对准中基准信息的优化处理方法,由变权量测预处理模块,异常基准信息检验模块,异常基准信息补偿模块和卡尔曼滤波模块组成,步骤包括:采用变权量测预处理方法对基准信息进行数据优化处理;采用基于残差x2检验和新息方差检验的联合检验法对基准信息进行实时检验;采用新息方差实测值替代新息方差理论值的方法对异常基准信息进行自适应补偿;应用卡尔曼滤波算法对子惯导的系统状态进行滤波估计。本发明的方法能够在不增加系统硬件成本的前提下,充分提高对基准信息的利用率,同时提高基准信息的精度和可靠性,极大地缩短了传递对准的时间,有效地提高了传递对准的精度。
说明书
技术领域
本发明涉及惯性导航系统的传递对准技术,尤其涉及动基座传递对准中基准信息的优化处理方法,属于惯性导航初始对准技术领域。
背景技术
传递对准是一种动基座条件下的初始对准,它主要用于机载、舰载、潜载和车载制导武器的初始对准。惯导系统传递对准是指,当载体运动时,载体上需要对准的惯导系统(称为子惯导系统)利用载体上已经对准好的惯导系统(称为主惯导系统)的基准信息进行对准的一种方法。惯导系统传递对准通过比较主惯导与子惯导的输出信息,采用卡尔曼滤波算法估计出子惯导系统的误差参数,并对子惯导系统进行补偿。在动基座条件下,采用传递对准技术可以有效地提高对准精度、极大地缩短对准时间,且可以在运动过程中迅速重建和恢复发生瞬时故障的惯导系统。
传递对准的理想状态是,将子惯导系统的各个参数指标调整到和基准信息一致。在实际工程应用中,由于环境干扰、信息传递过程中引入的各种误差等,使得子惯导系统接收到的基准信息品质下降,从而影响卡尔曼滤波的估计效果,导致传递对准的性能降低。随着主惯导系统数据率的提高,当基准信息更新周期小于子惯导系统的滤波周期时,若仅利用滤波更新时刻的单点信息进行滤波,未利用滤波周期内的其它量测值,不利于提高传递对准的精度;若直接以基准信息的更新周期作为滤波周期,将导致计算量大幅增加,影响传递对准的快速性。基准信息是惯导系统传递对准的初始输入,其品质问题直接影响子惯导系统的导航精度和快速响应能力。对基准信息进行优化处理,可以在不增加系统硬件成本的前提下,提高基准输入的精确程度及可利用程度,从而提高系统的导航精度和快速反应能力。
发明内容
本发明的目的在于:提供一套适用于惯导系统传递对准的基准信息优化处理方法,该方法可以提高对基准信息的利用率,同时提高基准信息的精度与可靠性,进而提升惯导系统传递对准的整体性能。
本发明采用如下技术方案:
一种惯导系统传递对准中基准信息的优化处理方法,其特征在于包括以下步骤:
步骤1:设传递对准的时间为TTA,设滤波周期为Tfilter,传递对准的滤波周期的总数为 设一个滤波周期内基准信息的更新次数为M次,设num为传递对准过程中的滤波周期序数,令num=1;
步骤2:采用变权量测预处理方法对主惯导系统提供的基准速度信息和基准姿态信息进行优化处理,计算过程包括:
步骤2.1:存储第num个滤波周期内的M次量测值,分别计算M次量测值对应的量测残差:
式中,M表示在一个滤波周期即k-1时刻到k时刻内基准信息的更新次数,M为正整数, 表示一个滤波周期内的第i次量测残差,i为正整数,1≤i≤M, 表示一个滤波周期内的第i次量测值, 为第 时刻的量测矩阵, 为从k-1时刻到 时刻的状态一步转移矩阵, 表示子惯导的系统状态X(k-1)的滤波估计值,所述子惯导的系统状态X(k-1)为子惯导系统的13维状态向量:
所述的一个滤波周期内的第i次量测值 为子惯导系统的5维量测向量:
所述的第 时刻的量测矩阵 以及从k-1时刻到 时刻的状态一步转移矩阵 分别为:
其中,δVe,δVn为主、子惯导系统东向和北向的速度之差, 分别为子惯导系统在东、北、天三个方向的失准角, 为子惯导系统水平方向的两个加速度计零偏,εx,εy,εz为子惯导系统的三个陀螺常值漂移,μx,μy,μz为子惯导系统到主惯导系统的安装误差角,δH,δP,δR分别为主、子惯导系统的航向角、纵摇角及横摇角之差,C11~C33表示子惯导系统的姿态矩阵 中的元素, 为子惯导系统导航坐标系到载体坐标系的转换矩阵,Tfilter为滤波周期,I表示单位矩阵,05×3表示5行3列的零矩阵,08×10为8行10列的零矩阵,08×3为8行3列的矩阵,Ve,Vn为子惯导系统的东向、北向速度,ωie表示地球自转角速率,Rn,Re分别表示沿子午圈、卯酉圈的曲率半径,L表示子惯导系统所处位置的纬度,fe,fn,fu分别为子惯导系统测量的东、北、天三个方向上的比力,
步骤2.2:对第num个滤波周期内的M次量测残差进行变权处理,即将第num个滤波周期内的第i次量测残差乘以相应的变权系数j:
j=i,1≤i≤M
式中,j表示第i次量测残差 对应的变权系数, 为经过变权处理的第i次量测残差,
步骤2.3:计算第num个滤波周期内M次量测值对应的变权量测残差rvm(k)和变权量测噪声方差阵Rvm(k):
式中,rvm(k)表示M次量测值对应的变权量测残差,Rvm(k)表示M次量测值对应的变权量测噪声方差阵,R(k)表示一次量测噪声方差阵。
步骤3:采用基于残差x2检验和新息方差比值检验的联合检验法对步骤2所述变权量测残差rvm(k)进行实时检验:
步骤3.1:计算残差x2检验函数值
Pr(k)=Rvm(k)+H(k)P(k,k-1)HT(k) (5)
其中,Pr(k)为新息方差的理论值,Rvm(k)为变权量测噪声方差阵,H(k)表示k时刻的量测矩阵,P(k,k-1)为k-1时刻到k时刻的一步预测误差方差阵,rvm(k)为变权量测残差,q(k)1为残差x2检验函数值,
步骤3.2:计算新息方差比值检验函数值
其中,Cr(k)为新息方差的实测值,rvm(l)为l时刻的变权量测残差,l=k-N+1,…,k,且N=20,q(k)2为新息方差比值检验函数值,Tr[Cr(k)]表示Cr(k)的迹,Tr[Pr(k)]表示Pr(k)的迹,
步骤3.3:根据公式(9)所述的联合检验判定准则,给出异常基准信息的判定结果
其中,TD1是残差x2检验函数对应的门限值,TD1服从自由度为5、虚警概率为α的x2分布,取α=0.1,TD1=15.086,TD2是新息方差比值检验函数对应的门限值,TD2=1.8,当且仅当q(k)1>TD1且q(k)2>TD2时,判定当前时刻的基准信息为异常。
步骤4:基于步骤3所述的异常基准信息联合检验结果,当基准信息出现异常时,用新息方差实测值Cr(k)替代新息方差理论值Pr(k),计算卡尔曼滤波的滤波增益矩阵K(k):
P(k,k-1)=Φ(k,k-1)P(k-1)ΦT(k,k-1)+Q(k-1) (10)
P(k)=[I-K(k)H(k)]P(k,k-1) (12)
其中,P(k,k-1)为从k-1时刻到k时刻的一步预测误差方差阵,Φ(k,k-1)为从k-1时刻到k时刻的状态一步转移矩阵,P(k-1)为k-1时刻的估计误差方差阵,Q(k-1)为系统噪声方差阵,K(k)为滤波增益矩阵,H(k)为k时刻的量测矩阵,Pr(k)为k时刻的新息方差理论值,Cr(k)为k时刻的新息方差实测值,I表示单位矩阵,公式(11)表示当基准信息出现异常时,用Cr(k)代替Pr(k)计算滤波增益矩阵K(k)。
步骤5:将步骤2所述的变权量测残差rvm(k)、步骤4所述的滤波增益矩阵K(k)引入卡尔曼滤波算法中,对子惯导的系统状态进行滤波估计,相应的计算公式为:
其中, 表示从k-1时刻到k时刻的状态一步预测值,Φ(k,k-1)为从k-1时刻到k时刻的状态一步转移矩阵, 表示k-1时刻子惯导系统状态X(k-1)的估计值,rvm(k)为子惯导系统k时刻的变权量测残差。
步骤6:判断是否到传递对准的结束时刻,若 则结束传递对准,否则令num=num+1,令k=k-1,重复步骤2~步骤5,对基准信息进行优化处理。
本发明的优点及有益效果:采用包含更多量测信息且量测噪声更小的变权量测残差代替一次量测残差,充分利用了滤波周期内的所有量测信息,将变权量测残差及变权量测噪声方差引入到经典卡尔曼滤波器中,大大缩短了滤波估计的收敛时间,提高了惯导系统传递对准的快速性;采用基于残差x2检验和新息方差比值检验的联合检验法对基准信息进行实时检验,克服了单一检验算法易出现的虚警和漏警问题,可以准确有效地检验出基准信息突跳、丢失、渐变等各种异常;采用新息方差实测值代替理论值的方法计算滤波增益矩阵,对异常时刻的基准信息进行自适应补偿,提高了滤波估计的精度和收敛速度,提升了惯导系统传递对准的精确性和快速性。
附图说明
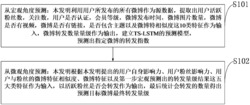
图1是本发明的方框图。
图2是本发明中基准信息优化处理方法的算法流程图
图3是本发明中异常基准信息检验与补偿模块的算法流程图
具体实施方式
本发明所述惯导系统传递对准中基准信息的优化处理方法,由变权量测预处理模块、异常基准信息检验模块、异常基准信息补偿模块以及卡尔曼滤波模块组成,如图1所示。
本发明的具体实施方法如下:
步骤1:设传递对准的时间为TTA,设滤波周期为Tfilter,传递对准的滤波周期的总数为 设一个滤波周期内基准信息的更新次数为M次,设num为传递对准过程中的滤波周期序数,令num=1,例如取传递对准的时间为TTA=600s,滤波周期为Tfilter=1s,传递对准的滤波周期的总数为600,一个滤波周期内基准信息的更新次数为M=100次;
步骤2:采用变权量测预处理方法对主惯导系统提供的基准速度信息和基准姿态信息进行优化处理,计算过程包括:
步骤2.1:存储第num个滤波周期内的M次量测值,分别计算M次量测值对应的量测残差:
式中,M表示在一个滤波周期即k-1时刻到k时刻内基准信息的更新次数,M为正整数, 表示一个滤波周期内的第i次量测残差,i为正整数,1≤i≤M, 表示一个滤波周期内的第i次量测值, 为第 时刻的量测矩阵, 为从k-1时刻到 时刻的状态一步转移矩阵, 表示子惯导的系统状态X(k-1)的滤波估计值,
所述子惯导的系统状态X(k-1)为子惯导系统的13维状态向量:
所述的一个滤波周期内的第i次量测值 为子惯导系统的5维量测向量:
所述的第 时刻的量测矩阵 以及从k-1时刻到 时刻的状态一步转移矩阵 分别为:
其中,δVe,δVn为主、子惯导系统东向和北向的速度之差, 分别为子惯导系统在东、北、天三个方向的失准角, 为子惯导系统水平方向的两个加速度计零偏,εx,εy,εz为子惯导系统的三个陀螺常值漂移,μx,μv,μz为子惯导系统到主惯导系统的安装误差角,δH,δP,δR分别为主、子惯导系统的航向角、纵摇角及横摇角之差,C11~C33表示子惯导系统的姿态矩阵 中的元素, 为子惯导系统导航坐标系到载体坐标系的转换矩阵,Tfilter为滤波周期,I表示单位矩阵,05×3表示5行3列的零矩阵,08×10为8行10列的零矩阵,08×3为8行3列的矩阵,Ve,Vn为子惯导系统的东向、北向速度,ωie表示地球自转角速率,Rn,Re分别表示沿子午圈、卯酉圈的曲率半径,L表示子惯导系统所处位置的纬度,fe,fn,fu分别为子惯导系统测量的东、北、天三个方向上的比力,
步骤2.2:对第num个滤波周期内的M次量测残差进行变权处理,即将第num个滤波周期内的第i次量测残差乘以相应的变权系数j:
j=i,1≤i≤M
式中,j表示第i次量测残差 对应的变权系数, 为经过变权处理的第i次量测残差,
步骤2.3:计算第num个滤波周期内M次量测值对应的变权量测残差rvm(k)和变权量测噪声方差阵Rvm(k):
式中,rvm(k)表示M次量测值对应的变权量测残差,Rvm(k)表示M次量测值对应的变权量测噪声方差阵,R(k)表示一次量测噪声方差阵,R(k)为5行5列的常数对角矩阵,R(k)具体取值根据子惯导系统的速度误差和姿态误差来设定,
例如设子惯导系统的速度误差为0.1m/s,子惯导系统的姿态误差为0.01°,则R(k)对角线元素的取值分别为{(0.1m/s)2,(0.1m/s)2,(0.01°)2,(0.01°)2,(0.01°)2},R(k)的其它元素均为0,且R(k)为常数矩阵。
步骤3:采用基于残差x2检验和新息方差比值检验的联合检验法对步骤2所述变权量测残差rvm(k)进行实时检验:
步骤3.1:计算残差x2检验函数值
Pr(k)=Rvm(k)+H(k)P(k,k-1)HT(k) (5)
其中,Pr(k)为新息方差的理论值,Rvm(k)为变权量测噪声方差阵,H(k)表示k时刻的量测矩阵,P(k,k-1)为k-1时刻到k时刻的一步预测误差方差阵,rvm(k)为变权量测残差,q(k)1为残差x2检验函数值,
步骤3.2:计算新息方差比值检验函数值
其中,Cr(k)为新息方差的实测值,rvm(l)为l时刻的变权量测残差,l=k-N+1,…,k,且N=20,q(k)2为新息方差比值检验函数值,Tr[Cr(k)]表示Cr(k)的迹,Tr[Pr(k)]表示Pr(k)的迹,
步骤3.3:根据公式(9)所述的联合检验判定准则,给出异常基准信息的判定结果
其中,TD1是残差x2检验函数对应的门限值,TD1服从自由度为5、虚警概率为α的x2分布,取α=0.1,TD1=15.086,TD2是新息方差比值检验函数对应的门限值,TD2=1.8,当且仅当q(k)1>TD1且q(k)2>TD2时,判定当前时刻的基准信息为异常。
步骤4:基于步骤3所述的异常基准信息联合检验结果,当基准信息出现异常时,用新息方差实测值Cr(k)替代新息方差理论值Pr(k),计算卡尔曼滤波的滤波增益矩阵K(k):
P(k,k-1)=Φ(k,k-1)P(k-1)ΦT(k,k-1)+Q(k-1) (10)
P(k)=[I-K(k)H(k)]P(k,k-1) (12)
其中,P(k,k-1)为从k-1时刻到k时刻的一步预测误差方差阵,Φ(k,k-1)为从k-1时刻到k时刻的状态一步转移矩阵,P(k1)为k-1时刻的估计误差方差阵,Q(k
惯导系统传递对准中基准信息的优化处理方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
















动态评分
0.0