








专利摘要
本发明公开了一种光偏振度测量装置,包括外壳、棱镜、旋转装置、入射光导光管、光传感器、水平传感器、温湿度传感器、反射光导光管、数码管显示器和处理器,其中,入射光导光管、反射光导光管、水平传感器和处理器安装在外壳内;温湿度传感器安装在顶盖上;棱镜安装在两导光管之间;光传感器安装在外壳内反射光导光管的出射光一端;水平调节装置安装在底座上;数码管显示器及各传感器的输出端连接处理器;外壳设置在旋转装置上表面。本发明测量精度高,结构简单,是一种易于实现的高精度的偏振度测量装置。
权利要求
1.一种光偏振度测量装置,包括外壳、棱镜、旋转装置、入射光导光管、支架、光传感器、水平传感器、温湿度传感器、反射光导光管、显示器、支撑装置和处理器,其特征在于:棱镜、入射光导光管、反射光导光管、处理器、显示器、支架安装在外壳内,棱镜、入射光导光管和反射光导光管安装在支架上,棱镜设置在入射光导光管的下部,入射光导光管的中心线垂直于底座;反射光导光管的前端紧贴棱镜而设置,光传感器安装在外壳内靠近反射光导光管的出射光的一端;光传感器的输出端连接处理器;外壳设置在旋转装置上表面;所述该支撑装置包括底座;
所述的光偏振度测量装置,其中:根据所用棱镜的折射率n
在旋转装置旋转后,入射光通过入射光导光管入射后经棱镜的反光平面反射,反射光经由反射光导光管传输给光传感器,光传感器接收反射光,并根据反发射光的光强,将接收到的反射光转换为表示光强的数字信号并传输给处理器;处理器接收到光强信号后,计算并记录旋转装置旋转n*180度范围内的所有光强信号,其中n为自然数,求取所有光强信号中的最大振幅的模平方I
部分偏振光的偏振度V=(I
2.根据权利要求1所述的光偏振度测量装置,其特征在于:外壳包括腔体、顶部和底部;支架安装在腔体内,设置在外壳底部上;水平传感器安装在外壳顶部上。
3.根据权利要求2所述的光偏振度测量装置,其特征在于:外壳顶部上设置有一个与入射光导光管直径相同的孔,所测光线经该孔进入入射光导光管。
4.根据权利要求1所述的光偏振度测量装置,其特征在于:所述显示器用于实时显示反射光光照强度、所测偏振度及温、湿度;处理器通过I/O接口与显示器连接。
说明书
技术领域
本发明涉及光测量领域,尤其是涉及一种光偏振度测量装置。
背景技术
光的偏振振动方向对于传播方向的不对称性叫做偏振,它是横波区别于纵波的一个最明显的标志,只有横波才能产生偏振现象,故光的偏振是光的波动性的又一例证,在垂直于传播方向的平面内,包含一切可能方向的横振动;横振动对称于传播方向的光称为自然光(非偏振光),凡其振动失去这种对称性的光统称偏振光。地球表面和大气中的任何目标,在反射、散射、透射、吸收和发射电磁波的过程中,会产生由其自身特性发生不同程度的偏振,某些物质的偏振特性差异明显。准确而便捷地测量光线的偏振度,提取、分析目标的偏振信息,在云与大气气溶胶的探测、地质勘探、环境监测、资源调查等领域有着重要的实际意义。因此对光的偏振度进行精确测量很有必要,现有的光偏振度测量装置结构比较复杂、实现难度大,为此,本发明提出了一种结构简单,测量精度高的光偏振度测量装置。
发明内容
本发明的目的是提供一种测量精度高、结构简单紧凑的光偏振度测量装置。
为实现本发明之目的,采用以下技术方案予以实现:
一种光偏振度测量装置,包括外壳、棱镜、旋转装置、入射光导光管、光传感器、水平传感器、温湿度传感器、反射光导光管、和处理器,其中:棱镜、入射光导光管、反射光导光管、温湿度传感器、处理器、显示器和水平传感器安装在外壳内;光传感器安装在外壳内靠近反射光导光管的出射光的一端;光传感器的输出端连接处理器;外壳设置在旋转装置上表面。
所述的光偏振度测量装置,其中:入射光导光管的中心线与棱镜光入射侧面的垂线之间的角度为布儒斯特角,导光管的入光口正对反射光的光路。
所述的光偏振度测量装置,其中:光偏振度测量装置还包括支架;外壳包括腔体、顶部和底部;支架安装在腔体内,设置在壳体底部上,棱镜、导光管安装在支架上,水平传感器安装在壳体顶部上。
所述的光偏振度测量装置,其中:壳体顶部上设置有一个与入射光导光管直径相同的孔,所测光线经该孔进入入射光导光管。
所述的光偏振度测量装置,其中:还包括显示器,设置在外壳内,用于实时显示反射光光照强度、所测偏振度及温、湿度;处理器通过I/O接口与显示器连接。
所述的光偏振度测量装置,其中:旋转装置的电机工作轴上设置有角度测量装置,该角度测量装置的输出端连接处理器。
所述的光偏振度测量装置,其中:该光偏振度测量装置还包括支撑装置,该支撑装置包括底座和水平调节装置,所述水平调节装置设置在底座的下部,用于调节底座的水平度,所述旋转装置安装在底座上。
所述的光偏振度测量装置,其中:该支撑装置还包括支杆和顶盖;支杆设置在底座上,顶盖设置在支杆上,并可调节竖直位置。
所述的光偏振度测量装置,其中:支杆上设有尺寸刻度。
所述的光偏振度测量装置,其中:顶盖上开有一个透射孔,供所测光线射入。
所述的光偏振度测量装置,其中:所述顶盖透射孔中安装有准直透镜。
所述的的光偏振度测量装置,其中:具体的,在旋转装置旋转后,入射光通过入射光导光管入射后经棱镜的反射面反射,反射光经由反射光导光管传输给光感器,光传感器接收反射光,并根据反发射光的光强,将接收到的反射光转换为表示光强的数字信号并传输给处理器;处理器接收到光强信号后,计算并记录转盘旋转n*180度范围内的所有光强信号,其中n为自然数,求取所有光强度信号中的最大振幅的模平方Imax和最小振幅的模平方Imin,代入公式2求得入射光的偏振度,将该偏振度通过显示装置进行显示;所述公式2为:
部分偏振光的偏振度V=(Imax-Imin)/(Imax+Imin),其中部分偏振光最大振幅的模平方为Imax,最小振幅的模平方为Imin。
附图说明
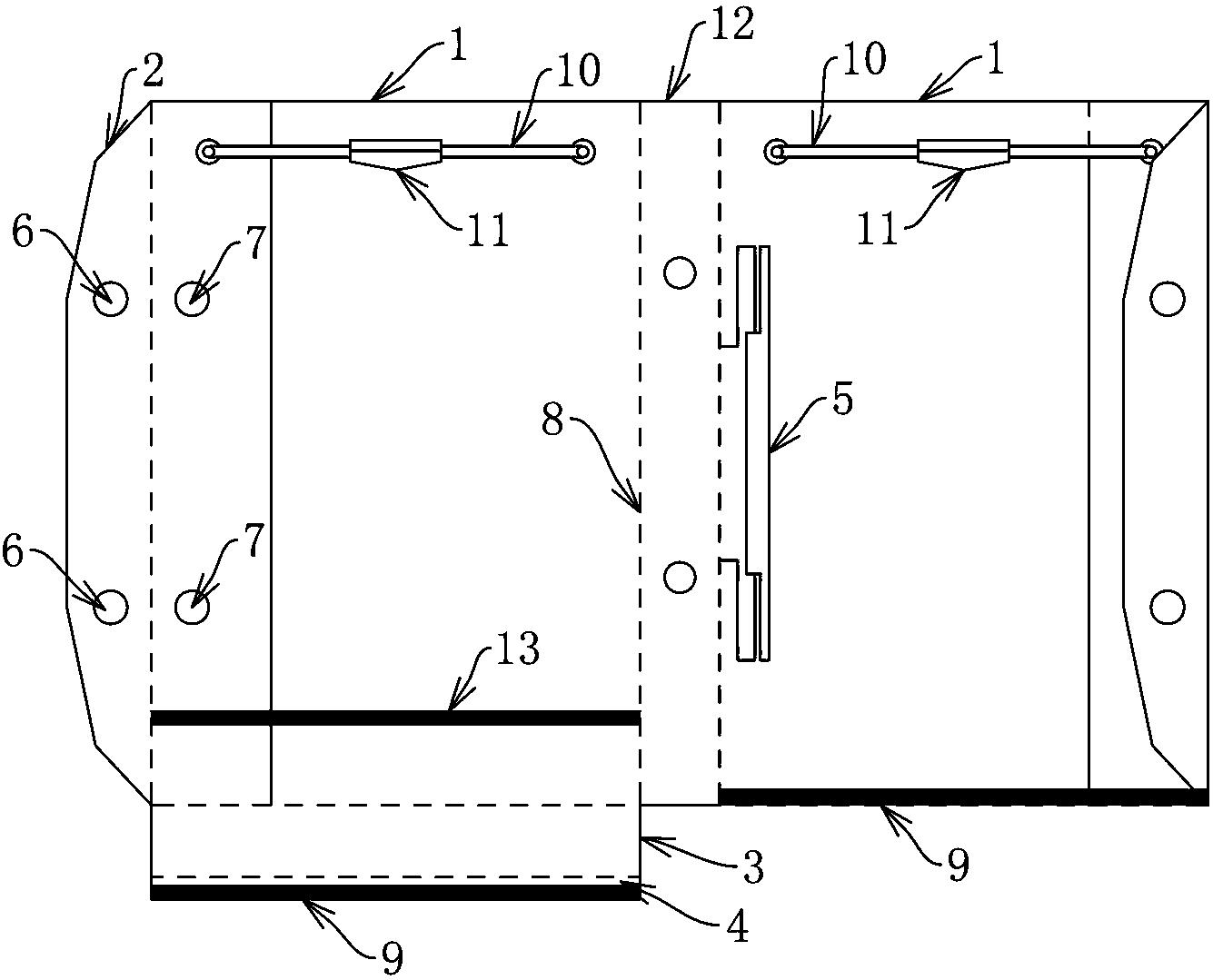
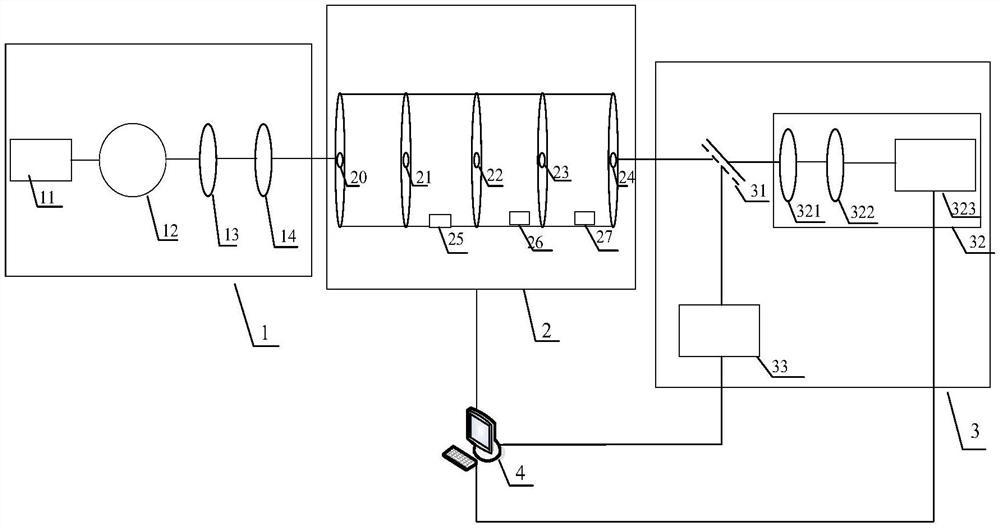
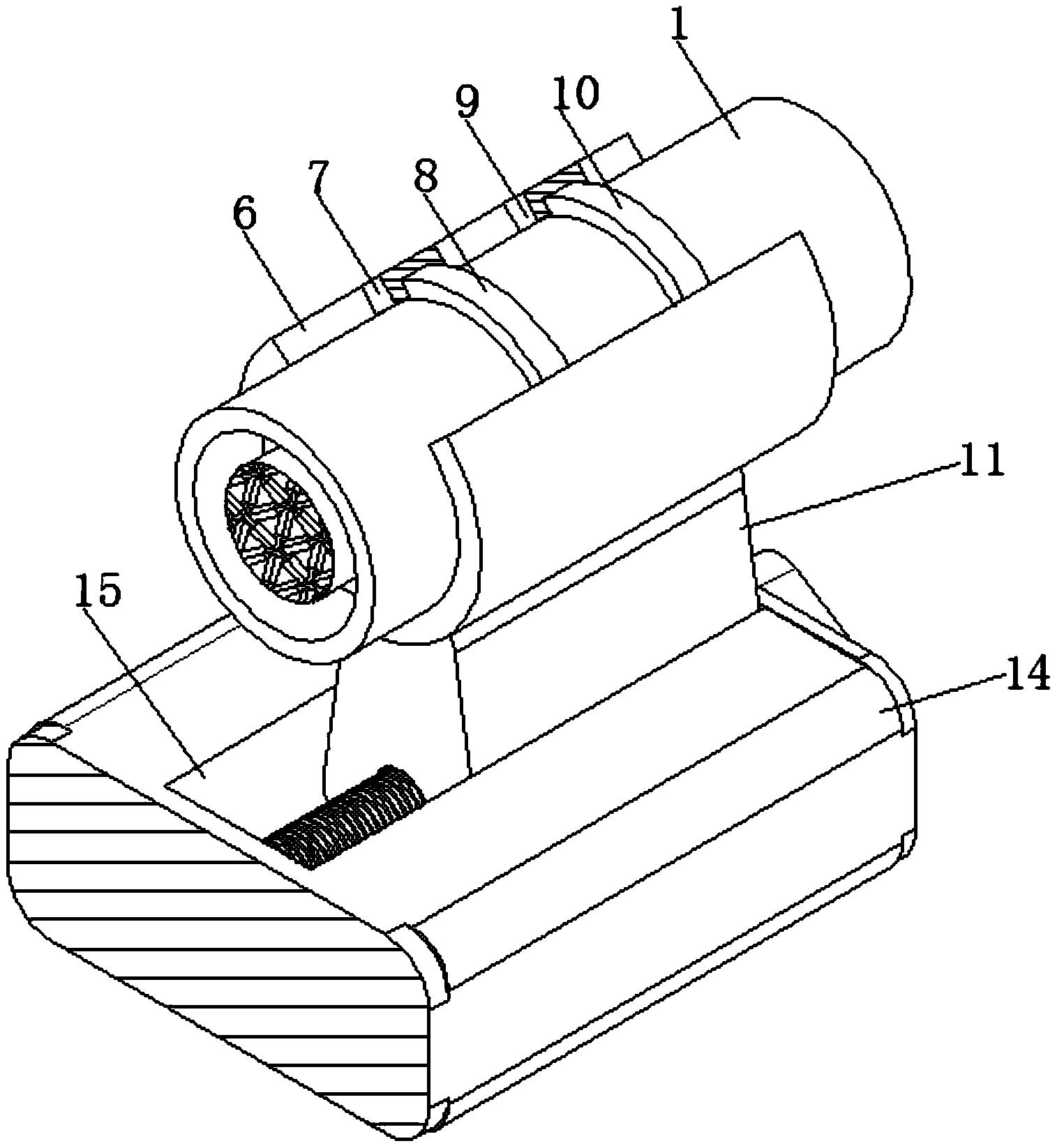
图1为本发明光偏振度测量装置结构示意图;
图2为采用不同偏振度测量装置进行偏振度测量的数据对比表。
图1中标记说明:1、外壳;2、入射光导光管;3、棱镜;4、支杆;5、显示器;6、开关;7、顶盖(“托盘”);8、温湿度传感器;9、水平传感器;10、处理器;11、反射光导光管;12、光传感器;13、支架;14、转盘;15、底座;16、水平调节装置;
具体实施方式
如图1所示,本发明实施例1的光偏振度测量装置包括外壳1、入射光导光管2、棱镜3、支杆4、显示器5(例如是HSN-5643S)、开关6、顶盖7、温湿度传感器8(例如是SHT1X)、水平传感器9(例如是SCA60C)、处理器10(例如是Arduino Uno R3)、反射光导光管11、光传感器12(例如是BH1750)、支架13、转盘14、底座15、水平调节装置16。
外壳1为圆柱形腔体,支架13安装在腔体内,棱镜3、入射光导光管2和反射光导光管11安装在支架13上,入射光导光管2是细长状空心管,垂直于底座15设置,棱镜3设置在入射光导光管2的下部,顶盖7中心与外壳顶部均设置有一个与入射光导光管2直径相同的孔,入射光导光管2的中心线垂直于底座,使得通过入射光导管2的入射光照射在棱镜3上,入射光导光管2的中心线与棱镜3反光平面的垂线之间的角度设置为布儒斯特角;反射光导光管11设置在腔体内支架13上,用于使反射光通过,反射光导光管11的前端尽量靠近棱镜3的上述反射面(优选的是紧贴棱镜3而设置),避免光漏出),另一端即反射光导光管11的光出射端安装有光传感器12,用于测量反射光的光强,光传感器12的输出端连接处理器10,以将接收到的光信号转换为电信号后将相应的脉冲信号发送给处理器9,处理器9通过I/O接口与显示器5连接。处理器10、光传感器12、显示器5都安装在外壳1内部的支架13上。外壳1放置在转盘14的上表面。两根支杆4设置在底座15上,顶盖7设置在支杆4上部,并可上下调节,支杆4上设有尺寸刻度,用于标记托盘7的高度,托盘7中心开有一个孔,用于透射入射光,当入射光源不是自然光而是其他光源时,可将光源放置在顶盖上,并使得光线照射方向正对托盘7的中心孔,穿过中心孔的光线进入入射光导光管2,水平调节装置16设置在底座15的下部,用于配合外壳顶部的水平传感器9调节整个装置的水平度。
为了最大程度地保证检测的精度,需要使与入射光导光管2中心线平行的光线(有效入射光)适量射入,此时可在顶盖7的中心孔内设置准直透镜以调节进光量,比如可使而得杂散的入射光变为水平光,进而提高有效入射光的进光量,保证测量的精度。
转盘14安装在底座15上,外壳1放置在转盘14上,由于包括棱镜3、入射光导光管2、出射光导光管11的光路元件位置确定后,转盘14旋转时,应当尽量保证光路不发生变化,因此有必要在测量前,校准装置的水平位置,这样转盘14在旋转时能够保证外壳中的光路不发生变化。在测量前,根据水平传感器9的示数,通过水平调节装置16调节装置的水平度,即可按如上实施例1描述的方式测量入射光的光偏振度。水平传感器9的输出端与处理器10的I/O口连接,处理器10接收水平传感器9传来的信号,并将水平角度显示在显示器5上。
下面对本发明光偏振度测量装置的工作原理进行说明:
布儒斯特定律:当入射角满足关系式tan ib=n2/n1(称为公式1)时,反射光为振动垂直于入射面的线偏振光,其中ib称为布儒斯特角,n1为空气折射率,n2为折射介质的折射率。
偏振度的一种计算方法是:若部分偏振光最大振幅的模平方为Imax,最小振幅的模平方为Imin,则部分偏振光的偏振度V定义为:V=(Imax-Imin)/(Imax+Imin)(称为公式2);
基于以上原理,本发明光偏振度测量装置,根据所用棱镜的折射率n2和空气的折射率n1,由上述公式1计算布儒斯特角,然后调整光线入射角为该角,即调整入射光导光管2的中心线与棱镜3的垂线之间的角度为布儒斯特角,调整时保持入射光导光管2不动,维持其中心线与底板的垂直位置,调节棱镜的位置,使得入射光导光管2的中心线与棱镜3反光平面垂线之间的角度为布儒斯特角,由此反射光为偏振方向垂直于反射面的线偏振光,调整反射光导光管11的位置,使其处于反射光的光路上,以使反射光通过。
通过水平旋转装置即转盘14的旋转,带动外壳1、支架13旋转,即在不改变入射角和入射光方向的情况下使反射面旋转,则反射光仍为线偏振光且其偏振方向不断改变。在旋转180度的过程中,不断测量反射光的光强,找出此过程中反射光最大振幅的模平方和最小振幅的模平方,代入公式2可求得入射光的偏振度。
具体的,在转盘14旋转过程中,入射光通过入射光导光管2入射后经棱镜3反射,反射光经由反射光导光管11传输给光感器12,光传感器12接收反射光,并根据反射光的光强,将接收到的反射光转换为表示光强的数字信号,通过其输出端传输给处理器10。光传感器12的采样频率可调,本发明中以100Hz为宜。处理器10接收、存储、筛选并处理计算转盘旋转180度范围内的所有光强信号,求取所有光强度信号中的最大振幅的模平方Imax和最小振幅的模平方Imin,代入公式2求得入射光的偏振度,将该偏振度通过显示装置5进行显示。
公式2中振幅的模平方为辐射强度Ie的度量,是辐射通量Φe对球面度的微分;光传感器输出的信号为光强Iv的度量,是光通量Φv对球面度的微分;二者之间有函数关系K(λ)=Φv/Φe,其中K(λ)是波长λ的函数,在波长一定时其值为常数c。故公式2等价于V=c(Imax-Imin)/c(Imax+Imin),故可用光传感器测得的光强来表征公式2中的振幅模平方量,从而使用公式2计算得到所测光的偏振度。
为了测量转盘14的转角,转盘14的电机工作轴上设置有角度测量装置,如脉冲编码器,所述脉冲编码器的输出端连接处理器10,在光偏振度测量装置工作时,处理器10接收脉冲编码器输出的脉冲信号,根据脉冲信号计算电机旋转的角度,即可获知反射面的转动角度。
利用此装置可求得一般光源的偏振度,还可测量一天中光线偏振度随时间的变化情况,以及雾霾、温度等等自然因素对光的偏振度的影响等,进而用以进行更加深入的研究。
利用本发明的光偏振度测量装置进行的部分数据测量与分析如下:
晴天条件下偏测得振度(上午10时):0.62,0.58,0.59,0.54,0.57;平均0.58.0;多云条件下测得偏振度(上午10时):0.46,0,48,0.49,0.44,0.42;平均0.458。
初步测量晴朗条件下偏振度随时间的变化(观测角度恒定为垂直于水平面方向,位置北纬39°57’52.84″,东经116°17’52.84″):
表1
结论:
1、多云条件下,由于散射条件不同,偏振度较小。
2、偏振度随太阳高度角变化而变化,太阳-天顶-观测者的角度越接近90度,则偏振程度越高。
现有的测量偏振度的方法主要包括以偏振片为检偏器检测偏振度以及使用大型精密仪器测量。我们通过实测数据,将以上两种方法(大型精密仪器使用的是SK010偏振测量仪)与本发明装置测得的结果进行比较,数据如下:
采用以上不同的测量装置进行偏振度测量的数据对比如图2所示。
结合以上数据,总结出本发明与传统测量技术比较时具有以下先进性及优势:
(1)利用布儒斯特定律来测量光的偏振度的思想是独创性的,是一种测量方法上的创新和变革;
(2)其理论精确度为100%,突破了普通的以偏振片作检偏器等测量方法消光度难以达到100%的技术瓶颈;
(3)本装置的成本仅120元人民币左右,与现有的大型DOP测量仪(成本在2000元上下)相比较,本装置具有显著的成本优势;
(4)本装置的便携性也显著优于传统设备,为研究人员进行室外测量提供有利条件。
光偏振度测量装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0