

IPC分类号 : G01M9/00,G01M9/02,G01M9/06,G01M9/08







专利摘要
本发明公开了一种连续在轨运动的主体和分离体轨迹捕获实验运动分配方法。该方法通过采集当前时刻分离体模型和主体模型的当前位姿,获得下一时间步长的分离体模型和主体模型的理论位姿,计算X、Y、Z向相对位置变化距离;按行程余量比重分配主体机构和分离体机构的运动;控制主体机构和分离体机构完成X、Y、Z向运动以及各自角度运动,到达下一时间步长的主体模型和分离体模型理论位姿。该方法能够避免主体机构和分离体机构同向运动,提高实验空间的利用率,获得更长的实验时间和更多捕获的轨迹点位数量,提高主体机构和分离体机构的使用寿命,具有计算简单快速,运行高效可靠的优点。
权利要求
1.连续在轨运动的主体和分离体轨迹捕获实验运动分配方法,其特征在于,所述的运动分配方法使用的解耦机构包括串联或并联的主体机构和分离体机构;
所述的主体机构具有六个自由度,分别由串联的六部分机构来控制,包括主体X向直线移动机构、主体Y向直线移动机构、主体Z向直线移动机构、主体α俯仰转动机构、主体β偏航转动机构和主体γ滚转机构;主体X向直线移动机构、主体Z向直线移动机构、主体Y向直线移动机构均由电机与丝杠配合驱动,主体α俯仰转动机构、主体β偏航转动机构通过电机与直线变圆弧机构实现,主体γ滚转机构由滚转电机配合减速器驱动;主体模型固定在主体机构执行末端的主体支杆上,主体模型的质心位于主体机构的解耦点,主体机构状态为主体解耦机构状态;
所述的分离体机构具有六个自由度,分别由串联的六部分机构来控制,包括分离体X向直线移动机构、分离体Y向直线移动机构、分离体Z向直线移动机构、分离体α俯仰转动机构、分离体β偏航转动机构和分离体γ滚转机构;分离体X向直线移动机构、分离体Z向直线移动机构、分离体Y向直线移动机构均由电机与丝杠配合驱动,分离体α俯仰转动机构、分离体β偏航转动机构通过电机与直线变圆弧机构实现,分离体γ滚转机构由滚转电机配合减速器驱动;分离体模型固定在分离体机构执行末端的分离体支杆上,分离体模型的质心位于分离体机构的解耦点,分离体机构状态为分离体解耦机构状态;
所述的运动分配方法包括以下步骤:
a.采集主体模型和分离体模型当前时刻的当前位姿;
主体模型当前位姿A
b.通过当前时刻的当前位姿的主体模型和分离体模型的气动力数据,计算主体模型和分离体模型下一时间步长的理论位姿;
主体模型理论位姿A
c.从当前位姿到达理论位姿,主体机构的三个角度自由度机构的运动角度分别为α
d.计算当前位姿和理论位姿状态下,主体模型和分离体模型的X向、Y向、Z向相对距离和相对距离变动量;
X向,主体模型当前位姿和分离体模型当前位姿相对距离x
Y向,主体模型当前位姿和分离体模型当前位姿相对距离y
Z向,主体模型当前位姿和分离体模型当前位姿相对距离z
e.计算主体模型当前位姿和分离体模型当前位姿在X向、Y向、Z向的负端余量和正端余量;
将主体机构的X向、Y向、Z向的运动行程分别表示为[x
将分离体机构的X向、Y向、Z向的运动行程分别表示为[x
f.按行程余量比重分配主体机构和分离体机构的运动;
主体机构的X向运动量为S
主体机构的Y向运动量为S
主体机构的Z向运动量为S
分离体机构的X向运动量为S
分离体机构的Y向运动量为S
分离体机构的Z向运动量为S
g.控制主体机构和分离体机构分别完成步骤c的角度运动和步骤f的X向、Y向、Z向运动,到达下一时间步长的主体模型理论位姿和分离体模型理论位姿。
2.根据权利要求1所述的连续在轨运动的主体和分离体轨迹捕获实验运动分配方法,其特征在于,所述的下一时间步长为常值。
3.根据权利要求1所述的连续在轨运动的主体和分离体轨迹捕获实验运动分配方法,其特征在于,所述的步骤a的具体步骤如下:
a1.获取当前时刻主体机构和分离体机构各自由度电机的编码器位置,编码器的值能够准确反映出电机转动的角度,再根据丝杠导程计算丝杠传动的距离:
a2.主体γ滚转机构和分离体γ滚转机构是电机配合减速器直接运动,主体机构和分离体机构的滚转角θ
a3.主体α俯仰转动机构和分离体α俯仰转动机构采用直线变圆弧结构;
A点为丝杠上滑块初始位置,坐标为A(x
分别计算获得α
a4.主体β偏航转动机构和分离体β偏航转动机构采用直线变圆弧结构;
C点为丝杠上滑块初始位置,坐标为C(x
分别计算获得β
说明书
技术领域
本发明属于高超声速风洞试验技术领域,具体涉及一种连续在轨运动的主体和分离体轨迹捕获实验运动分配方法。
背景技术
目前,全球各地的飞行器和航天器以及飞行武器研究都离不开风洞实验,风洞实验是分析物体气动特性、研究气流规律、研究相邻飞行器气动力相互作用的有效途径。风洞实验通过缩减飞行器尺寸,营造稳定的高超声速流场,获得最真实、最可靠的气动数据,以验证飞行器的气动特性。
当前的风洞实验已经不满足于仅获得飞行器在固定姿态下的气动力特性,还需要进一步研究飞行器在流场中的运动轨迹。轨迹捕获实验是根据当前气动力解算下一时间步长的飞行器模型理论位姿,并控制飞行器模型运动到理论位姿,逐步捕获飞行器模型运动轨迹的风洞实验。
联动轨迹捕获实验由单一飞行器轨迹捕获实验发展而来,目的在于捕获分离体与主体分离时的相对运动轨迹,以研究分离体与主体之间的相互作用效果。相比原来单自由度的轨迹捕获实验,能够直接将分离体与主体之间的相互作用、激波效应等直接模拟,便于验证理论计算与分析。联动捕获轨迹实验时,主体模型和分离体模型中的测力天平分别测量主体模型和分离体模型当前时刻的当前位姿的气动力数据,根据获得的气动力数据计算下一时间步长的主体模型和分离体模型的理论位姿,并控制主体机构和分离体机构运动至理论位姿。由于主体模型和分离体模型在同一流场中,极易产生同向运动,而主体机构和分离体机构的各自由度行程有限,主体机构或分离体机构将在主体模型或分离体模型的某一自由度到达极限时停止运行,显然,这对实验空间的利用是极低的,会大幅降低捕获的轨迹点位数量。
因此,联动轨迹捕获实验中的重要技术问题之一是联动轨迹捕获实验中主体和分离体解耦机构运动分配,当前亟需发展一种连续在轨运动的主体和分离体轨迹捕获实验运动分配方法。
发明内容
本发明所要解决的技术问题是提供一种连续在轨运动的主体和分离体轨迹捕获实验运动分配方法。
本发明的连续在轨运动的主体和分离体轨迹捕获实验运动分配方法,其特点是,所述的运动分配方法使用的解耦机构包括串联或并联的主体机构和分离体机构;
所述的主体机构具有六个自由度,分别由串联的六部分机构来控制,包括主体X向直线移动机构、主体Y向直线移动机构、主体Z向直线移动机构、主体α俯仰转动机构、主体β偏航转动机构和主体γ滚转机构;主体X向直线移动机构、主体Z向直线移动机构、主体Y向直线移动机构均由电机与丝杠配合驱动,主体α俯仰转动机构、主体β偏航转动机构通过电机与直线变圆弧机构实现,主体γ滚转机构由滚转电机配合减速器驱动;主体模型固定在主体机构执行末端的主体支杆上,主体模型的质心位于主体机构的解耦点,主体机构状态为主体解耦机构状态;
所述的分离体机构具有六个自由度,分别由串联的六部分机构来控制,包括分离体X向直线移动机构、分离体Y向直线移动机构、分离体Z向直线移动机构、分离体α俯仰转动机构、分离体β偏航转动机构和分离体γ滚转机构;分离体X向直线移动机构、分离体Z向直线移动机构、分离体Y向直线移动机构均由电机与丝杠配合驱动,分离体α俯仰转动机构、分离体β偏航转动机构通过电机与直线变圆弧机构实现,分离体γ滚转机构由滚转电机配合减速器驱动;分离体模型固定在分离体机构执行末端的分离体支杆上,分离体模型的质心位于分离体机构的解耦点,分离体机构状态为分离体解耦机构状态;
所述的运动分配方法包括以下步骤:
a.采集主体模型和分离体模型当前时刻的当前位姿;
主体模型当前位姿AZo=(xZo,yZo,zZo,αZo,βZo,θZo),分离体模型当前位姿AFo=(xFo,yFo,zFo,αFo,βFo,θFo);
b.通过当前时刻的当前位姿的主体模型和分离体模型的气动力数据,计算主体模型和分离体模型下一时间步长的理论位姿;
主体模型理论位姿AZn=(xZn,yZn,zZn,αZn,βZn,θZn),分离体模型理论位姿AFn=(xFn,yFn,zFn,αFn,βFn,θFn);
c.从当前位姿到达理论位姿,主体机构的三个角度自由度机构的运动角度分别为αZn-αZ0,βZn-βZ0,θZn-θZ0;分离体机构的三个角度自由度机构的运动角度分别为αFn-αF0,βFn-βF0,θFn-θF0;
d.计算当前位姿和理论位姿状态下,主体模型和分离体模型的X向、Y向、Z向相对距离和相对距离变动量;
X向,主体模型当前位姿和分离体模型当前位姿相对距离xFo-xZo、主体模型理论位姿和分离体模型理论位姿相对距离xFn-xZn,相对距离变动量Sx=xFn-xZn-xFo+xZo;
Y向,主体模型当前位姿和分离体模型当前位姿相对距离yFo-yZo、主体模型理论位姿和分离体模型理论位姿相对距离yFn-yZn,相对距离变动量Sy=yFn-yZn-yFo+yZo;
Z向,主体模型当前位姿和分离体模型当前位姿相对距离zFo-zZo、主体模型理论位姿和分离体模型理论位姿相对距离zFn-zZn,相对距离变动量Sz=zFn-zZn-zFo+zZo;
e.计算主体模型当前位姿和分离体模型当前位姿在X向、Y向、Z向的负端余量和正端余量;
将主体机构的X向、Y向、Z向的运动行程分别表示为[xZmin,xZmax]、[yZmin,yZmax]、[zZmin,zZmax],则主体机构X向、Y向、Z向的负端余量分别为xZo-xZmin、yZo-yZmin、zZo-zZmin,正端余量分别为xZmax-xZo、yZmax-yZo、zZmax-zZo;
将分离体机构的X向、Y向、Z向的运动行程分别表示为[xFmin,xFmax]、[yFmin,yFmax]、[zFmin,zFmax],则分离体机构X向、Y向、Z向的负端余量分别为xFo-xFmin、yFo-yFmin、zFo-zFmin,正端余量分别为xFmax-xFo、yFmax-yFo、zFmax-zFo;
f.按行程余量比重分配主体机构和分离体机构的运动;
主体机构的X向运动量为Sx*(xZo-xZmin)/(xZmin-xZmax),数值为正,则运行方向为主体机构的X向正向,否则为主体机构的X向负向;
主体机构的Y向运动量为Sy*(yZo-yZmin)/(yZmin-yZmax),数值为正,则运行方向为主体机构的Y向正向,否则为主体机构的Y向负向;
主体机构的Z向运动量为Sz*(zZo-zZmin)/(zZmin-zZmax),数值为正,则运行方向为主体机构的Z向正向,否则为主体机构的Z向负向;
分离体机构的X向运动量为Sx*(xFo-xFmin)/(xFmin-xFmax),数值为正,则运行方向为分离体机构的X向正向,否则为分离体机构的X向负向;
分离体机构的Y向运动量为Sy*(yFo-yFmin)/(yFmin-yFmax),数值为正,则运行方向为分离体机构的Y向正向,否则为分离体机构的Y向负向;
分离体机构的Z向运动量为Sz*(zFo-zFmin)/(zFmin-zFmax),数值为正,则运行方向为分离体机构的Z向正向,否则为分离体机构的Z向负向;
g.控制主体机构和分离体机构分别完成步骤c的角度运动和步骤f的X向、Y向、Z向运动,到达下一时间步长的主体模型理论位姿和分离体模型理论位姿。
所述的下一时间步长为常值。
所述的步骤a的具体步骤如下:
a1.获取当前时刻主体机构和分离体机构各自由度电机的编码器位置,编码器的值能够准确反映出电机转动的角度,再根据丝杠导程计算丝杠传动的距离: 其中q为丝杠传动距离,Ph为丝杠导程,θ为电机转动的角度,i为相应减速器的减速比;分别计算获得(xZo,yZo,zZo)和(xFo,yFo,zFo);
a2.主体γ滚转机构和分离体γ滚转机构是电机配合减速器直接运动,主体机构和分离体机构的滚转角θγ(t)与滚转电机转角γ(t)关系为: 只与减速比相关;分别计算获得θZo和θFo;
a3.主体α俯仰转动机构和分离体α俯仰转动机构采用直线变圆弧结构;
A点为丝杠上滑块初始位置,坐标为A(x0,y0),B点为连杆与俯仰机构的转动轴处,转动轴与俯仰中心的连线与X向夹角为 俯仰转轴做弧形运动的圆弧半径OB为R,连杆AB长度为L;设俯仰电机驱动俯仰直线滑块A运动位移AA′为S,则连杆带动俯仰部分绕O做旋转运动;俯仰转动角度α计算公式如下:
分别计算获得αZo和αFo;
a4.主体β偏航转动机构和分离体β偏航转动机构采用直线变圆弧结构;
C点为丝杠上滑块初始位置,坐标为C(x0,z0),D点为连杆与偏航机构的转动轴处,转动轴与偏航中心的连线与X向夹角为ω0;偏航转轴做弧形运动的圆弧半径OD为R′,连杆CD长度为L′;设偏航电机驱动偏航直线滑块C运动位移CC′为S′,则连杆带动偏航部分绕O做旋转运动;偏航转动角度β计算公式如下:
分别计算获得βZo和βFo。
本发明的连续在轨运动的主体和分离体轨迹捕获实验运动分配方法的主体模型和分离体模型同时置于风洞流场中。该方法将主体模型和分离体模型分别安装在主体机构和分离体机构的解耦点,主体机构和分离体机构任一自由度的运动都不会引起其余自由度的变化,主体机构状态的三个角度自由度从(αZo,βZo,θZo)到(αZn,βZn,θZn),分离体机构状态的三个角度自由度从(αFo,βFo,θFo)到(αFn,βFn,θFn),不存在补偿需求且不必考虑相对角度关系,主体机构的三个角度自由度机构直接将主体模型绕质心转动至(αZn,βZn,θZn)即可,分离体机构的三个角度自由度机构直接将分离体模型绕质心转动至(αFn,βFn,θFn)即可。
本发明的连续在轨运动的主体和分离体轨迹捕获实验运动分配方法通过对联动轨迹捕获实验中主体和分离体解耦机构运动分配,避免了主体机构和分离体机构同方向运动带来的短时间内到达行程极限而停止实验的情况。通过按行程余量比重分配主体机构和分离体机构的运动,提高了实验空间的利用率,有效增加了捕获的轨迹点位数量,获得更完整的主体模型和分离体模型运动轨迹。
本发明的连续在轨运动的主体和分离体轨迹捕获实验运动分配方法以保证主体模型和分离体模型的相对位姿正确为前提,通过按行程余量比重分配主体机构和分离体机构的运动,能够在主体机构和分离体机构中合理分配X向、Y向、Z向的直线运动距离,从而在时间步长固定的情况下,减小主体机构和分离体机构X向、Y向、Z向电机的最高运动速度,减小对主体机构和分离体机构X向、Y向、Z向电机的较大冲击,降低主体机构和分离体机构X向、Y向、Z向电机负载,提高了主体机构和分离体机构的使用寿命。
本发明的连续在轨运动的主体和分离体轨迹捕获实验运动分配方法只需按行程余量比重分配主体机构和分离体机构的运动,方法简洁,不用进行繁琐的计算,高效可靠。
综上所述,本发明的连续在轨运动的主体和分离体轨迹捕获实验运动分配方法能够避免主体机构和分离体机构同向运动,提高实验空间的利用率,获得更长的实验时间和更多的捕获轨迹点位数量,提高主体机构和分离体机构的使用寿命,具有计算简单快速,运行高效可靠的优点。
附图说明
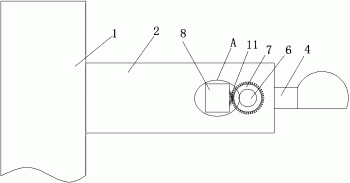
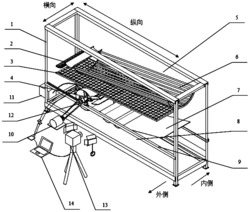
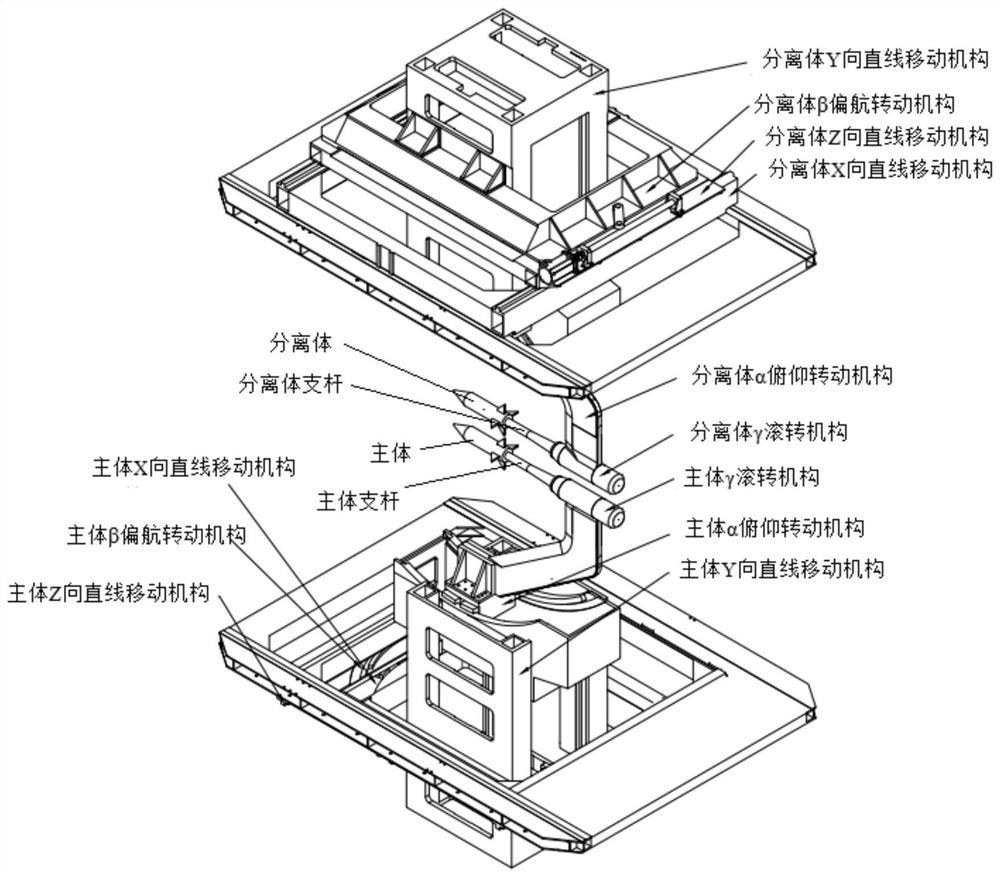
图1为本发明的连续在轨运动的主体和分离体轨迹捕获实验运动分配方法使用的主体机构和分离体机构示意图;
图2为本发明的连续在轨运动的主体和分离体轨迹捕获实验运动分配方法中的α俯仰转动机构直线转圆弧简图;
图3为本发明的连续在轨运动的主体和分离体轨迹捕获实验运动分配方法中的β偏航转动机构直线转圆弧简图;
图4为本发明的连续在轨运动的主体和分离体轨迹捕获实验运动分配方法的按行程余量比重分配主体机构和分离体机构的运动流程图。
具体实施方式
下面结合附图和实施例详细说明本发明。
以下描述用于揭示本发明以使本领域技术人员能够实现本发明。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。在以下描述中界定的本发明的基本原理可以应用于其他实施方案、变形方案、改进方案、等同方案以及没有背离本发明的精神和范围的其他技术方案。
实施例1
如图1所示,本实施例的分离体机构和主体机构以上下结构的形式安装,分离体模型和主体模型在实验时都被置于高超声速风洞流场中。
所述的主体机构具有六个自由度,分别由串联的六部分机构来控制,包括主体X向直线移动机构、主体Y向直线移动机构、主体Z向直线移动机构、主体α俯仰转动机构、主体β偏航转动机构和主体γ滚转机构;主体X向直线移动机构、主体Z向直线移动机构、主体Y向直线移动机构均由电机与丝杠配合驱动,主体α俯仰转动机构、主体β偏航转动机构通过电机与直线变圆弧机构实现,主体γ滚转机构由滚转电机配合减速器驱动;主体模型固定在主体机构执行末端的主体支杆上,主体模型的质心位于主体机构的解耦点,主体机构状态为主体解耦机构状态;
所述的分离体机构具有六个自由度,分别由串联的六部分机构来控制,包括分离体X向直线移动机构、分离体Y向直线移动机构、分离体Z向直线移动机构、分离体α俯仰转动机构、分离体β偏航转动机构和分离体γ滚转机构;分离体X向直线移动机构、分离体Z向直线移动机构、分离体Y向直线移动机构均由电机与丝杠配合驱动,分离体α俯仰转动机构、分离体β偏航转动机构通过电机与直线变圆弧机构实现,分离体γ滚转机构由滚转电机配合减速器驱动;分离体模型固定在分离体机构执行末端的分离体支杆上,分离体模型的质心位于分离体机构的解耦点,分离体机构状态为分离体解耦机构状态;
所述的运动分配方法包括以下步骤:
a.采集主体模型和分离体模型当前时刻的当前位姿;
主体模型当前位姿AZo=(xZo,yZo,zZo,αZo,βZo,λZo),分离体模型当前位姿AFo=(xFo,yFo,zFo,αFo,βFo,θFo);
具体步骤如下:
a1.获取当前时刻主体机构和分离体机构各自由度电机的编码器位置,编码器的值能够准确反映出电机转动的角度,再根据丝杠导程计算丝杠传动的距离: 其中q为丝杠传动距离,Ph为丝杠导程,θ为电机转动的角度,i为相应减速器的减速比;分别计算获得(xZo,yZo,zZo)和(xFo,yFo,zFo);
a2.主体γ滚转机构和分离体γ滚转机构是电机配合减速器直接运动,主体机构和分离体机构的滚转角θγ(t)与滚转电机转角γ(t)关系为: 只与减速比相关;分别计算获得θZo和θFo;
a3.如图2所示,主体α俯仰转动机构和分离体α俯仰转动机构采用直线变圆弧结构;
A点为丝杠上滑块初始位置,坐标为A(x0,y0),B点为连杆与俯仰机构的转动轴处,转动轴与俯仰中心的连线与X向夹角为 俯仰转轴做弧形运动的圆弧半径OB为R,连杆AB长度为L;设俯仰电机驱动俯仰直线滑块A运动位移AA′为S,则连杆带动俯仰部分绕O做旋转运动;俯仰转动角度α计算公式如下:
分别计算获得αZo和αFo;
a4.如图3所示,主体β偏航转动机构和分离体β偏航转动机构采用直线变圆弧结构;
C点为丝杠上滑块初始位置,坐标为C(x0,z0),D点为连杆与偏航机构的转动轴处,转动轴与偏航中心的连线与X向夹角为ω0;偏航转轴做弧形运动的圆弧半径OD为R′,连杆CD长度为L′;设偏航电机驱动偏航直线滑块C运动位移CC′为S′,则连杆带动偏航部分绕O做旋转运动;偏航转动角度β计算公式如下:
分别计算获得βZo和βFo。
b.通过当前时刻的当前位姿的主体模型和分离体模型的气动力数据,计算主体模型和分离体模型下一时间步长的理论位姿;
主体模型理论位姿AZn=(xZn,yZn,zZn,αFn,βZn,θZn),分离体模型理论位姿AFn=(xFn,yFn,zFn,αFn,βFn,θFn);
c.从当前位姿到达理论位姿,主体机构的三个角度自由度机构的运动角度分别为αZn-αZ0,βZn-βZ0,θZn-θZ0;分离体机构的三个角度自由度机构的运动角度分别为αFn-αF0,βFn-βF0,θFn-θF0;
d.计算当前位姿和理论位姿状态下,主体模型和分离体模型的X向、Y向、Z向相对距离和相对距离变动量;
X向,主体模型当前位姿和分离体模型当前位姿相对距离xFo-xZo、主体模型理论位姿和分离体模型理论位姿相对距离xFn-xZn,相对距离变动量Sx=xFn-xZn-xFo+xZo;
Y向,主体模型当前位姿和分离体模型当前位姿相对距离yFo-yZo、主体模型理论位姿和分离体模型理论位姿相对距离yFn-yZn,相对距离变动量Sy=yFn-yZn-yFo+yZo;
Z向,主体模型当前位姿和分离体模型当前位姿相对距离zFo-zZo、主体模型理论位姿和分离体模型理论位姿相对距离zFn-zZn,相对距离变动量Sz=zFn-zZn-zFo+zZo;
e.计算主体模型当前位姿和分离体模型当前位姿在X向、Y向、Z向的负端余量和正端余量;
将主体机构的X向、Y向、Z向的运动行程分别表示为[xZmin,xZmax]、[yZmin,yZmax]、[zZmin,zZmax],则主体机构X向、Y向、Z向的负端余量分别为xZo-xZmin、yZo-yZmin、zZo-zZmin,正端余量分别为xZmax-xZo、yZmax-yZo、zZmax-zZo;
将分离体机构的X向、Y向、Z向的运动行程分别表示为[xFmin,xFmax]、[yFmin,yFmax]、[zFmin,zFmax],则分离体机构X向、Y向、Z向的负端余量分别为xFo-xFmin、yFo-yFmin、zFo-zFmin,正端余量分别为xFmax-xFo、yFmax-yFo、zFmax-zFo;
f.如图4所示,按行程余量比重分配主体机构和分离体机构的运动;
主体机构的X向运动量为Sx*(xZo-xZmin)/(xZmin-xZmax),数值为正,则运行方向为主体机构的X向正向,否则为主体机构的X向负向;
主体机构的Y向运动量为Sy*(yZo-yZmin)/(yZmin-yZmax),数值为正,则运行方向为主体机构的Y向正向,否则为主体机构的Y向负向;
主体机构的Z向运动量为Sz*(zZo-zZmin)/(zZmin-zZmax),数值为正,则运行方向为主体机构的Z向正向,否则为主体机构的Z向负向;
分离体机构的X向运动量为Sx*(xFo-XFmin)/(xFmin-xFmax),数值为正,则运行方向为分离体机构的X向正向,否则为分离体机构的X向负向;
分离体机构的Y向运动量为Sy*(yFo-yFmin)/(yFmin-yFmax),数值为正,则运行方向为分离体机构的Y向正向,否则为分离体机构的Y向负向;
分离体机构的Z向运动量为Sz*(zFo-zFmin)/(zFmin-zFmax),数值为正,则运行方向为分离体机构的Z向正向,否则为分离体机构的Z向负向;
g.控制主体机构和分离体机构分别完成步骤c的角度运动和步骤f的X向、Y向、Z向运动,到达下一时间步长的主体模型理论位姿和分离体模型理论位姿。
所述的下一时间步长为常值。
以上对本发明的一个实施例进行了详细说明,但该内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。
连续在轨运动的主体和分离体轨迹捕获实验运动分配方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0