









专利摘要
一种基于空间增益的稀疏平面阵形优化方法,包括以下步骤:对阵列进行初始化,得到由阵元的坐标矢量构成的坐标矩阵,计算坐标矩阵对应的空间增益;设置迭代参数;对初始化后的阵列进行迭代优化,每一次迭代优化时对阵列中的第5~N个阵元分别依次进行扰动,对每一次扰动完成后生成的阵元的新坐标进行判断,用符合判断条件的新坐标替换该阵元的旧坐标,更新坐标矩阵,重复迭代过程,直到达到设定的迭代总次数为止,接受阵列流形,将经过迭代优化更新完毕的坐标矩阵[x0,y0]作为稀疏平面阵列的阵列位置。在需要产生一个角度指向的面阵时,本发明的代价函数能综合评估旁瓣电平和主瓣波束宽度,本发明方法能够产生主瓣波束宽度窄且旁瓣电平低的稀疏平面阵。
权利要求
1.一种基于空间增益的稀疏平面阵形优化方法,其特征在于,包括以下步骤:
步骤1、对阵列进行初始化,得到由阵元的坐标矢量构成的坐标矩阵[x0,y0],计算坐标矩阵[x0,y0]对应的空间增益G,具体步骤如下:
步骤1-1、生成雷达天线的平面矩形阵四个角上的阵元的初始坐标:
其中,[x0,y0]是阵列中所有阵元沿x轴和y轴的坐标矢量构成的N×1维坐标矩阵,N是阵元总数,Lx和Ly是平面矩形阵的区域界限;
步骤1-2、以Kλ为栅格随机生成平面矩形阵其它阵元的初始坐标:
其中,K为栅格的精确度,λ为入射信号的波长,round(·)表示取最接近的整数的运算操作,rand(b,c)表示产生b×c维(0,1)区间上均匀分布的伪随机数矩阵的运算操作,b为上式中的n-4,c为上式中的1;
步骤1-3、判断步骤1-2生成的阵元的初始坐标是否满足条件dmin>0.5λ,若满足条件,则根据空间增益函数计算坐标矩阵[x0,y0]对应的空间增益G,若不满足条件则返回步骤1-2,重新生成初始坐标;
其中,dmin=min(dmn),dmn为阵列中任意两个阵元坐标之间的间距,
式中的θ0为入射信号的俯仰角, 为入射信号的方位角, i是[0,π/2]上以N1为采样数的第i个采样点的俯仰角,i=1,2,…,N1, l是[0,2π]上以N2为采样数的第l个采样点的方位角,l=1,2,…,N2; 是俯仰角为θ0、方位角为 的入射信号在坐标矩阵[x0,y0]上的导向矢量, 是俯仰角为θi、方位角为 的信号在坐标矩阵[x0,y0]上的导向矢量,下式中j为虚数单位;
步骤2、设置迭代参数,所述迭代参数包括迭代总次数Q、退火初始温度T0、退火因子μ,令迭代次数q=1进行首次迭代,执行下一步;
步骤3、对初始化后的阵列进行迭代优化,每一次的迭代优化包括对阵列中的第5~N个阵元分别依次进行扰动,对每一次扰动完成后生成的阵元的新坐标进行判断,用符合判断条件的新坐标替换该阵元的旧坐标,然后更新坐标矩阵[x0,y0],重复迭代过程,直到达到设定的迭代总次数Q为止,具体步骤如下:
步骤3-1、进行第q次迭代优化,令p=5,生成该次迭代优化的第1个需扰动阵元的新坐标(xt,yt),执行步骤3-2,首次迭代时q=1;
步骤3-2、按下式生成第p个阵元的新坐标(xt,yt),执行步骤3-3:
其中,x0(p)和y0(p)是第p个阵元的x轴和y轴坐标;
步骤3-3、根据以下条件判断是否接受步骤3-2生成的第p个阵元的新坐标(xt,yt):
步骤3-3a、如果第p个阵元的新坐标(xt,yt)在步骤1-1所述平面矩形阵限定的区域内,则执行步骤3-3b,否则执行步骤3-5;
步骤3-3b、如果第p个阵元的新坐标(xt,yt)和阵列中任意其它阵元的坐标之间的间距都小于半波长,则执行步骤3-3c,否则执行步骤3-5;
步骤3-3c、如果第p个阵元的新坐标(xt,yt)不同于该阵元的旧坐标,则执行步骤3-3d,否则执行步骤3-5;
步骤3-3d、用第p个阵元的新坐标(xt,yt)替换第p个阵元的旧坐标,得到新坐标矩阵[x1,y1],根据空间增益函数计算新坐标矩阵[x1,y1]对应的空间增益G’,比较G和G’,若Δ=G-G’<0,则执行步骤3-4,否则执行步骤3-3e;
其中, 式中的θ0为入射信号的俯仰角, 为入射信号的方位角,θi是[0,π/2]上以N1为采样数的第i个采样点的俯仰角, 是[0,2π]上以N2为采样数的第l个采样点的方位角; 是俯仰角为θ0、方位角为 的入射信号在新坐标矩阵[x1,y1]上的导向矢量, 是俯仰角为θi、方位角为 的入射信号在新坐标矩阵[x1,y1]上的导向矢量;
步骤3-3e、令Tq=μTq-1,并产生随机数r,若exp(-Δ/Tq)>r,则执行步骤3-4,否则执行步骤3-5;
步骤3-4、接受满足前述条件的新坐标(xt,yt),更新坐标矩阵[x0,y0],令[x0,y0]=[x1,y1],G=G’,执行步骤3-5;
步骤3-5、判断是否所有的阵元都扰动完毕,若p<N,则令p=p+1,返回执行步骤3-2,生成下一个需扰动阵元的新坐标,否则认为本次迭代所有阵元的扰动全部完成,执行步骤3-6;
步骤3-6、判断迭代优化过程是否完成,若q<Q,则令q=q+1,执行步骤3-1,否则执行步骤4;
步骤4、接受阵列流形:将经过迭代优化更新完毕的坐标矩阵[x0,y0]作为稀疏平面阵列的阵列位置。
2.如权利要求1所述的基于空间增益的稀疏平面阵形优化方法,其特征在于:所述步骤3中的扰动是指是给阵元的坐标加上随机数,生成阵元的新坐标(xt,yt)。
说明书
技术领域
本发明属于信号处理技术领域,尤其涉及一种稀疏平面阵列流形的优化方法。
背景技术
阵列信号处理技术广泛应用于雷达、通信、声纳、导航和射电天文学等领域。影响阵列性能的重要因素之一是其阵形,通过对阵列的阵形进行优化可以提高阵列波达方向估计性能以及自适应抗干扰的能力。
针对通过阵列几何结构来优化波达方向(DOA)估计性能的方法和研究,现有的研究成果有:
P.J.Bevelacqua等发表于2007年IEEE Transactions on Antenna and Propagation上的《Optimizing Antenna Array Geometry for Interference Suppression》一文中,提出通过模拟退火算法获得优化的阵列流形。然而该方法的优化对象仅限于均匀圆阵。
T.N.Kaifas等发表于2008年IEEE Transactions on Antenna and Propagation上的《On the Geometry Synthesis of Arrays with a Given Excitation by the Orthogonal Method》一文中,提出在给定激励条件下,通过结合迭代技术和正交方法获得了所需的阵元位置和逼近的方向图。然而该方法容易陷入局部最优,并且其优化结果对初始阵形敏感。
P.J.Bevelacqua等发表于2009年IEEE Transactions on Antennas and Propagation上的《Geometry and Weight Optimization for Minimizing Sidelobes in Wideband Planar Arrays》一文中,提出用粒子群算法和宽带阵列最低旁瓣的优化权来优化阵形。然而该方法以最小化旁瓣为约束条件,不能兼顾主瓣波束宽度。
目前的阵形优化方法,多数将最小化旁瓣电平比或者主瓣波束宽度作为代价函数,局限于固定阵形而非自适应性能更佳的稀疏阵,优化的代价函数不能兼顾主副瓣峰值比和主瓣波束宽度这两个重要参数,不能同时综合评估这两个重要参数来获得阵形优化。
发明内容
针对上述技术的不足,本发明的目的在于提供一种基于空间增益的稀疏平面阵阵形优化方法,使得优化后的稀疏平面矩形阵具有旁瓣电平低和主瓣波束宽度窄的优点。
为了实现上述目的,本发明采取如下的技术解决方案:
一种基于空间增益的稀疏平面阵形优化方法,包括以下步骤:
步骤1、对阵列进行初始化,得到由阵元的坐标矢量构成的坐标矩阵[x0,y0],计算坐标矩阵[x0,y0]对应的空间增益G,具体步骤如下:
步骤1-1、生成雷达天线的平面矩形阵四个角上的阵元的初始坐标:
其中,[x0,y0]是阵列中所有阵元沿x轴和y轴的坐标矢量构成的N×1维坐标矩阵,N是阵元总数,Lx和Ly是平面矩形阵的区域界限;
步骤1-2、以Kλ为栅格随机生成平面矩形阵中其它阵元的初始坐标:
其中,K为栅格的精确度,λ为入射信号的波长,round(·)表示取最接近的整数的运算操作,rand(b,c)表示产生b×c维(0,1)区间上均匀分布的伪随机数矩阵的运算操作,b为上式中的n-4,c为上式中的1;
步骤1-3、判断步骤1-2生成的阵元的初始坐标是否满足条件dmin>0.5λ,若满足条件,则根据空间增益函数计算坐标矩阵[x0,y0]对应的空间增益G,若不满足条件则返回步骤1-2,重新生成初始坐标;
其中,dmin=min(dmn),dmn表示阵列中任意两个阵元坐标之间的间距,
式中的θ0为入射信号的俯仰角, 为入射信号的方位角, i是[0,π/2]上以N1为采样数的第i个采样点的俯仰角,i=1,2,…,N1, l是[0,2π]上以N2为采样数的第l个采样点的方位角,l=1,2,…,N2; 是俯仰角为θ0、方位角为 的入射信号在坐标矩阵[x0,y0]上的导向矢量, 是俯仰角为θi、方位角为 的入射信号在坐标矩阵[x0,y0]上的导向矢量,下式中j为虚数单位;
步骤2、设置迭代参数,所述迭代参数包括迭代总次数Q、退火初始温度T0、退火因子μ,令迭代次数q=1进行首次迭代,执行下一步;
步骤3、对初始化后的阵列进行迭代优化,每一次的迭代优化包括对阵列中的第5~N个阵元分别依次进行扰动,对每一次扰动完成后生成的阵元的新坐标进行判断,用符合判断条件的新坐标替换该阵元的旧坐标,然后更新坐标矩阵[x0,y0],重复迭代过程,直到达到设定的迭代总次数Q为止,具体步骤如下:
步骤3-1、进行第q次迭代优化,令p=5,生成该次迭代优化的第1个需扰动阵元的新坐标(xt,yt),执行步骤3-2,首次迭代时q=1;
步骤3-2、按下式生成第p个阵元的新坐标(xt,yt),执行步骤3-3:
其中,x0(p)和y0(p)是第p个阵元的x轴和y轴坐标;
步骤3-3、根据以下条件判断是否接受步骤3-2生成的第p个阵元的新坐标(xt,yt):
步骤3-3a、如果第p个阵元的新坐标(xt,yt)在步骤1-1所述平面矩形阵限定的区域内,则执行步骤3-3b,否则执行步骤3-5;
步骤3-3b、如果第p个阵元的新坐标(xt,yt)和阵列中任意其它阵元坐标之间的间距都小于半波长,则执行步骤3-3c,否则执行步骤3-5;
步骤3-3c、如果第p个阵元的新坐标(xt,yt)不同于该阵元的旧坐标,则执行步骤3-3d,否则执行步骤3-5;
步骤3-3d、用第p个阵元的新坐标(xt,yt)替换第p个阵元的旧坐标,得到新坐标矩阵[x1,y1],根据空间增益函数计算新坐标矩阵[x1,y1]对应的空间增益G’,比较G和G’,若Δ=G-G’<0,则执行步骤3-4,否则执行步骤3-3e;
其中, 式中的θ0为入射信号的俯仰角, 为入射信号的方位角,θi是[0,π/2]上以N1为采样数的第i个采样点的俯仰角, 是[0,2π]上以N2为采样数的第l个采样点的方位角; 是俯仰角为θ0、方位角为 的入射信号在新坐标矩阵[x1,y1]上的导向矢量, 是俯仰角为θi、方位角为 的入射信号在新坐标矩阵[x1,y1]上的导向矢量;
步骤3-3e、令Tq=μTq-1,并产生随机数r,若exp(-Δ/Tq)>r,则执行步骤3-4,否则执行步骤3-5;
步骤3-4、接受满足前述条件的新坐标(xt,yt),更新坐标矩阵[x0,y0],令[x0,y0]=[x1,y1],G=G’,执行步骤3-5;
步骤3-5、判断是否所有的阵元都扰动完毕,若p<N,则令p=p+1,返回执行步骤3-2,生成下一个需扰动阵元的新坐标,否则认为本次迭代所有阵元的扰动全部完成,执行步骤3-6;
步骤3-6、判断迭代优化过程是否完成,若q<Q,则令q=q+1,执行步骤3-1,否则执行步骤4;
步骤4、接受阵列流形:将经过迭代优化更新完毕的坐标矩阵[x0,y0]作为稀疏平面阵列的阵列位置。
本发明步骤3中的扰动是指是给阵元的坐标加上随机数,生成阵元的新坐标(xt,yt)。
本发明方法对稀疏平面阵的阵形进行优化时,首先确定平面矩形阵四个角上阵元坐标后,保持平面矩形阵四个角上阵元坐标不变,对阵列中其它阵元坐标增加随机数,生成新坐标,实现对平面矩形阵中除四个角上的坐标外的其它坐标进行扰动,并用扰动生成的符合条件的新坐标替换阵列中相应阵元的旧坐标,更新坐标矩阵,经过多次迭代优化后,接受更新后坐标矩阵中阵元的坐标信息,实现对阵列流形的优化。与现有技术相比,本发明具有以下优点:
1)本发明优化的稀疏平面阵列的主瓣波束宽度更窄,因而能量更集中,有益于干扰抑制和多目标波达方向超分辨;
2)本发明的优化结果不会陷入局部最优,对优化的初始阵形不敏感;
3)本发明的空间增益代价函数能综合评价旁瓣电平和主瓣波束宽度,因而使得阵列优化程度的评价更为全面。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中需要使用的附图做简单介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
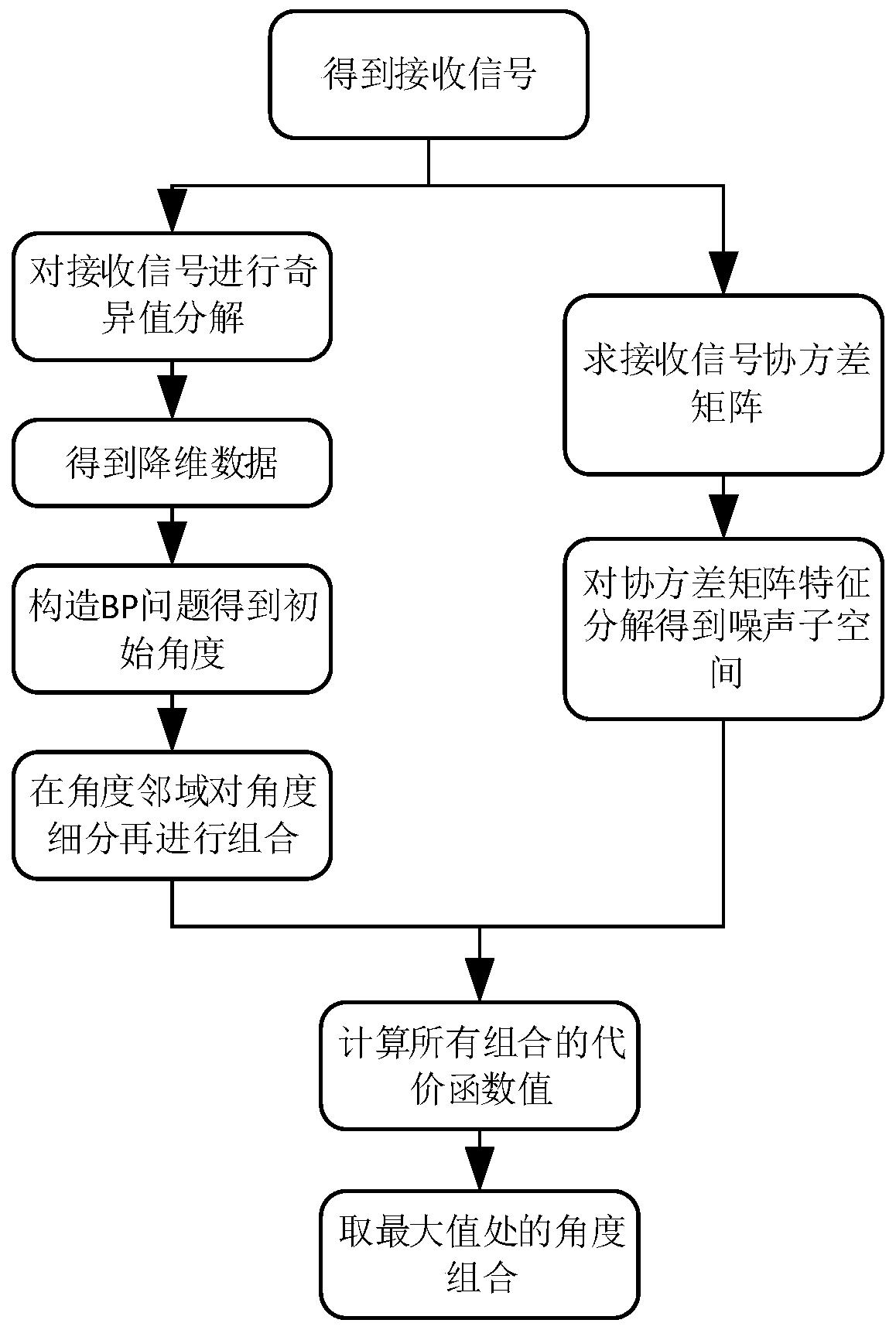
图1是本发明方法的流程图;
图2a是均匀圆阵的示意图;
图2b是蝴蝶阵的示意图;
图2c是优化前的稀疏平面阵的示意图;
图2d是采用本发明方法优化后的稀疏平面阵的示意图;
图3是仿真实验获得的空间增益代价函数的变化曲线图;
图4是仿真实验获得的退火温度的变化曲线图;
图5a是均匀圆阵的非dB方向图;
图5b是蝴蝶阵的非dB方向图;
图5c是优化前的稀疏平面阵的非dB方向图;
图5d是采用本发明方法优化后的稀疏平面阵的非dB方向图;
图6a是均匀圆阵的dB方向图;
图6b是蝴蝶阵的dB方向图;
图6c是优化前的稀疏平面阵的dB方向图;
图6d是采用本发明方法优化后的稀疏平面阵的dB方向图。
具体实施方式
参照图1,图1为本发明方法的流程图,本发明方法尤其针对稀疏平面矩形阵的阵列流形进行优化,优化的具体步骤如下:
步骤1、对阵列进行初始化,得到由阵元的坐标矢量构成的坐标矩阵[x0,y0],计算坐标矩阵[x0,y0]对应的空间增益G,步骤1包括以下步骤:
步骤1-1、生成雷达天线的稀疏平面矩形阵四个角上的阵元的初始坐标:
其中,[x0,y0]是阵列中所有阵元沿x轴和y轴的坐标矢量构成的N×1维坐标矩阵,N是阵元总数,Lx和Ly是平面矩形阵的区域界限;
步骤1-2、以Kλ为栅格随机生成平面矩形阵的其它阵元的初始坐标:
其中,K为栅格的精确度,λ为入射信号的波长,round(·)表示取最接近的整数的运算操作,rand(b,c)表示产生b×c维(0,1)区间上均匀分布的伪随机数矩阵的运算操作,b为上式中的n-4,c为上式中的1;
步骤1-3、判断步骤1-2生成的阵元的初始坐标是否满足条件dmin>0.5λ,若满足条件,则根据空间增益函数计算坐标矩阵[x0,y0]对应的空间增益G,若不满足条件则返回步骤1-2,重新生成初始坐标;
其中,dmin=min(dmn),dmn为阵列中任意两个阵元坐标之间的间距,
式中的θ0为入射信号的俯仰角, 为入射信号的方位角, i是[0,π/2]上以N1为采样数的第i个采样点的俯仰角,i=1,2,…,N1, l是[0,2π]上以N2为采样数的第l个采样点方位角,l=1,2,…,N2; 是俯仰角为θ0、方位角为 的入射信号在坐标矩阵[x0,y0]上的导向矢量, 是俯仰角为θi、方位角为 的信号在坐标矩阵[x0,y0]上的导向矢量,下式中j为虚数单位;
步骤2、设置迭代参数,所述迭代参数包括迭代总次数Q、退火初始温度T0和退火因子μ,令迭代次数q=1进行首次迭代,执行下一步;
步骤3、对初始化后的阵列进行迭代优化,每一次的迭代优化包括对阵列中的第5~N个阵元分别依次进行扰动,对每一次扰动完成后生成的阵元的新坐标进行判断,用符合判断条件的新坐标替换该阵元的旧坐标,更新坐标矩阵[x0,y0],重复迭代过程,直到达到设定的迭代总次数Q为止;
本发明对阵元坐标进行迭代优化的过程中,坐标矩阵[x0,y0]中前4个阵元不参与扰动,即步骤1-1生成的平面矩形阵中四个角上的阵元的坐标保持不变,只对平面矩形阵中除四个角上阵元以外的其它阵元分别进行扰动,每一次的扰动只针对一个阵元进行,每完成一次扰动就对该阵元生成的新坐标进行判断,是否接受新坐标;本发明的扰动是指是给阵元的坐标加上随机数生成阵元的新坐标(xt,yt);
步骤3包括以下步骤:
步骤3-1、进行第q次迭代优化,生成该次迭代优化的第1个需扰动阵元的新坐标(xt,yt);
由于坐标矩阵[x0,y0]中前4个阵元不进行扰动,因此坐标矩阵[x0,y0]中的第5个阵元为第1个需扰动的阵元,令p=5,执行步骤3-2,q=1时为首次迭代;
步骤3-2、按下式生成第p个阵元的新坐标(xt,yt),执行步骤3-3:
其中,x0(p)和y0(p)是第p个阵元的x轴和y轴坐标;
步骤3-3、根据以下条件判断是否接受步骤3-2生成的第p个阵元的新坐标(xt,yt):
步骤3-3a、如果第p个阵元的新坐标(xt,yt)在步骤1-1所述平面矩形阵限定的区域内,则执行步骤3-3b,否则认为第p个阵元的坐标无需改变,执行步骤3-5;
步骤3-3b、如果第p个阵元的新坐标(xt,yt)和阵列中任意其它阵元的坐标之间的间距都小于半波长,则执行步骤3-3c,否则执行步骤3-5;
步骤3-3c、如果第p个阵元的新坐标(xt,yt)不同于该阵元的旧坐标,则执行步骤3-3d,否则执行步骤3-5;
步骤3-3d、用第p个阵元的新坐标(xt,yt)替换该第p个阵元的旧坐标,得到对应的新坐标矩阵[x1,y1],根据空间增益函数计算新坐标矩阵[x1,y1]对应的空间增益G’,比较G和G’,若Δ=G-G’<0,则执行步骤3-4,否则执行步骤3-3e;
其中, 式中的θ0为入射信号的俯仰角, 为入射信号的方位角,θi是[0,π/2]上以N1为采样数的第i个采样点的俯仰角, 是[0,2π]上以N2为采样数的第l个采样点的方位角; 是俯仰角为θ0、方位角为 的入射信号在新坐标矩阵[x1,y1]上的导向矢量, 是俯仰角为θi、方位角为 的入射信号在新坐标矩阵[x1,y1]上的导向矢量;
步骤3-3e、令Tq=μTq-1,并产生随机数r,若exp(-Δ/Tq)>r,则执行步骤3-4,否则执行步骤3-5;
步骤3-4、接受满足前述条件的新坐标(xt,yt),即该第p个阵元的新坐标(xt,yt)可以保留,更新坐标矩阵[x0,y0],令[x0,y0]=[x1,y1],G=G’,执行步骤3-5;
步骤3-5、判断是否所有的阵元都扰动完毕,若p<N,则令p=p+1,返回执行步骤3-2,生成下一个需扰动阵元的新坐标,否则认为本次迭代所有阵元的扰动全部完成,执行步骤3-6;
步骤3-6、判断迭代优化过程是否完成,若q<Q,则令q=q+1,执行步骤3-1,否则执行步骤4;
步骤4、接受阵列流形:将经过迭代优化更新完毕的坐标矩阵[x0,y0]作为稀疏平面阵列的阵列位置。
本发明的效果可通过以下仿真实验进一步说明:
仿真条件:设定需要将稀疏平面阵列指向平面法向,共有9个阵元分布在x轴孔径为1.5λ、y轴孔径为1.5λ的矩形区域里,栅格尺寸为100λ,迭代总次数Q为2000次,λ为入射信号的波长且λ=1,退火温度初始值T0=16,退火因子μ=0.99,波束扫描范围为俯仰角θ∈(0°,89.5°),方位角
仿真结果:
图2a为均匀圆阵的示意图,图2b为蝴蝶阵的示意图,图2c为优化前的稀疏平面阵的示意图,图2d为优化后的稀疏平面阵的示意图,采用HFSS软件绘制。
图3为仿真实验获得的空间增益代价函数的变化曲线图,图3中x轴为迭代次数,y轴为空间增益。由图3可以看出,当迭代次数小于400次时,空间增益抖动频率大,当迭代次数达到400次后,空间增益稳定上升,直至达到最高增益。
图4为仿真实验获得的退火温度的变化曲线图,图4中x轴为迭代次数,y轴为退火温度。由图4可以看出,当迭代次数大于400次后,温度足够低,若空间增益无增加则不再接受扰动的阵形。
图5a至图5d分别为未考虑阵元耦合等因素时MATLAB仿真的均匀圆阵、蝴蝶阵、优化前稀疏平面阵、优化后稀疏平面阵的方向图(作图单位未化为dB),对比图5a至图5d,可以看出采用本发明方法优化后的稀疏平面阵的方向图旁瓣电平更低且主瓣宽度更窄。
图6a至图6d分别为考虑了阵元耦合等因素时HFSS仿真的均匀圆阵、蝴蝶阵、优化前稀疏平面阵、优化后稀疏平面阵的方向图(作图单位dB化),对比图6a至图6d,可以看出在考虑了阵元互耦等因素的情况下,采用本发明方法优化后的稀疏平面阵的方向图旁瓣电平更低且主瓣宽度更窄。
表1.稀疏阵列法线指向上空间增益的仿真数据列表
由表1可以看出,即使考虑了电偶极子的耦合等天线的因素,基于本发明提出的代价函数的优化方法得出的稀疏平面阵都能获得最高的主瓣空间增益。
由以上的仿真实验结果可知,在需要产生一个角度指向的面阵,本发明的代价函数能综合评估旁瓣电平和主瓣波束宽度,本发明的方法能够产生主瓣波束宽度窄且旁瓣电平低的稀疏平面阵。
以上所述,仅是本发明的较佳实施例而已,并非对本发明做任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
一种基于空间增益的稀疏平面阵形优化方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0