









专利摘要
本发明公开了一种大地电磁时间域标定方法及系统。该方法包括:通过获取大地电磁测深仪中时间序列的系统响应、各频率的幅值校正量以及各频率的相位校正量,根据幅值校正量和相位校正量确定标定的传输函数,根据标定的传输函数采用傅里叶反变换方法确定标定的单位脉冲响应函数,采用希尔伯特变换法确定系统响应的复数序列;将单位脉冲响应函数与复数序列进行卷积操作,得到标定后的时间序列。采用本发明的方法及系统,能够直接对时间序列进行标定,具有减小滤波对有效信号的损失以及噪声的残留,增强时间域阻抗估计结果稳健性的优点。
权利要求
1.一种大地电磁时间域标定方法,其特征在于,包括:
获取大地电磁测深仪中时间序列的系统响应、各频率的幅值校正量以及各频率的相位校正量;
根据所述幅值校正量和所述相位校正量确定标定的传输函数;
根据所述标定的传输函数采用傅里叶反变换方法确定标定的单位脉冲响应函数;
采用希尔伯特变换法确定所述系统响应的复数序列;
将所述单位脉冲响应函数与所述复数序列进行卷积操作,得到标定后的时间序列。
2.根据权利要求1所述的大地电磁时间域标定方法,其特征在于,在所述将所述单位脉冲响应函数与所述复数序列进行卷积操作,得到标定后的时间序列,之后还包括:
将所述标定后的时间序列中前M项作为大地电磁时间域标定结果;所述M的个数与所述系统响应的序列长度相等。
3.根据权利要求2所述的大地电磁时间域标定方法,其特征在于,所述根据所述标定的传输函数采用傅里叶反变换方法确定标定的单位脉冲响应函数,具体包括:
根据所述标定的传输函数确定双边谱传输函数;所述双边谱传输函数的公式如下:
式中,H'(ω)为双边谱传输函数,H(ω)为标定的传输函数,ω
对所述双边谱传输函数采用三次样条插值法,得到插值后的传输函数;
对所述插值后的传输函数进行离散傅里叶反变换,得到单位脉冲响应函数;所述单位脉冲响应函数的公式如下:
式中,h(n)为单位脉冲响应函数,H"(ω)为插值后的传输函数,N为H"(ω)序列的长度,n为时间点自变量。
4.根据权利要求3所述的大地电磁时间域标定方法,其特征在于,所述采用希尔伯特变换法确定所述系统响应的复数序列,具体包括:
对所述系统响应进行希尔伯特变换,得到系统响应对应的虚部序列;所述虚部序列的公式如下:
式中,y'(n)为系统响应对应的虚部序列,M为系统响应的序列长度,y(m)为第m个时间点的电磁场大小,n与m为不同的时间点,m为时间点卷积变量,n=1,2,3,...,M,m=1,2,3,...,M;
根据所述系统响应和所述系统响应对应的虚部序列确定所述系统响应的复数序列;所述复数序列的公式如下:
y"(n)=y(n)+iy'(n)
式中,y"(n)为自变量为n的复数序列,y(n)为系统响应。
5.根据权利要求4所述的大地电磁时间域标定方法,其特征在于,
所述标定的传输函数公式如下:
H(ω)=A(ω)e
式中,H(ω)为标定的传输函数,A(ω)为幅值校正量,φ(ω)为相位校正量;
所述标定后的时间序列公式如下:
式中,y
6.一种大地电磁时间域标定系统,其特征在于,包括:
数据获取模块,用于获取大地电磁测深仪中时间序列的系统响应、各频率的幅值校正量以及各频率的相位校正量;
标定的传输函数确定模块,用于根据所述幅值校正量和所述相位校正量确定标定的传输函数;
单位脉冲响应函数确定模块,用于根据所述标定的传输函数采用傅里叶反变换方法确定标定的单位脉冲响应函数;
复数序列确定模块,用于采用希尔伯特变换法确定所述系统响应的复数序列;
标定后的时间序列生成模块,用于将所述单位脉冲响应函数与所述复数序列进行卷积操作,得到标定后的时间序列。
7.根据权利要求6所述的大地电磁时间域标定系统,其特征在于,所述系统,还包括:
大地电磁时间域标定结果生成模块,用于将所述标定后的时间序列中前M项作为大地电磁时间域标定结果;所述M的个数与所述系统响应的序列长度相等。
8.根据权利要求7所述的大地电磁时间域标定系统,其特征在于,所述单位脉冲响应函数确定模块,具体包括:
双边谱传输函数确定单元,用于根据所述标定的传输函数确定双边谱传输函数;所述双边谱传输函数的公式如下:
式中,H'(ω)为双边谱传输函数,H(ω)为标定的传输函数,ω
插值单元,用于对所述双边谱传输函数采用三次样条插值法,得到插值后的传输函数;
单位脉冲响应函数确定单元,用于对所述插值后的传输函数进行离散傅里叶反变换,得到单位脉冲响应函数;所述单位脉冲响应函数的公式如下:
式中,h(n)为单位脉冲响应函数,H"(ω)为插值后的传输函数,N为H"(ω)序列的长度,n为时间点自变量。
9.根据权利要求8所述的大地电磁时间域标定系统,其特征在于,所述复数序列确定模块,具体包括:
希尔伯特变换单元,用于对所述系统响应进行希尔伯特变换,得到系统响应对应的虚部序列;所述虚部序列的公式如下:
式中,y'(n)为系统响应对应的虚部序列,M为系统响应的序列长度,y(m)为第m个时间点的电磁场大小,n与m为不同的时间点,m为时间点卷积变量,n=1,2,3,...,M,m=1,2,3,...,M;
复数序列确定单元,用于根据所述系统响应和所述系统响应对应的虚部序列确定所述系统响应的复数序列;所述复数序列的公式如下:
y"(n)=y(n)+iy'(n)
式中,y"(n)为自变量为n的复数序列,y(n)为系统响应。
10.根据权利要求9所述的大地电磁时间域标定系统,其特征在于,
所述标定的传输函数公式如下:
H(ω)=A(ω)e
式中,H(ω)为标定的传输函数,A(ω)为幅值校正量,φ(ω)为相位校正量;
所述标定后的时间序列公式如下:
式中,y
说明书
技术领域
本发明涉及电磁勘探技术领域,特别是涉及一种大地电磁时间域标定方法及系统。
背景技术
大地电磁测深法是电磁勘探中的一种重要方法,该方法通过对天然大地电磁场中正交的电磁分量进行观测实现对地下电性结构的反演。然而天然电磁场信号强度弱,且信号能量随频率分布并不均匀。因此,大地电磁测深系统会对测得的电磁场信号进行分频增益。同时,为了压制环境噪声的影响以及根据仪器对测量频率范围的要求,仪器内部设置了各种滤波器,这些滤波器大多不是零相位滤波器,通过这些滤波器后信号的相位会发生改变。此外,仪器使用电极观测两点间电场以及使用多匝线圈观测交变磁场的方式也会改变测量的电磁场幅值与相位。故仪器记录到的电磁场数据并非真实电磁场数据,而是真实电磁场数据经过仪器复杂增益与相移后得到的系统响应。若不加区分地使用系统响应代替真实电磁场信号进行时间域、变换域滤波处理或时间域阻抗估计,会使得滤波结果与阻抗估计结果发生严重畸变,影响到这些方法的应用效果,从而影响了大地电磁测深方法在噪声干扰较严重区域的应用。
现有的对大地电磁数据中系统影响进行校正的标定处理是在频率域中进行的,这使得时间序列中的系统影响得不到校正。而当前的大地电磁滤波方法根据处理对象的不同可分为:①时间域滤波方法;②变换域滤波方法;③频率域滤波方法。其中,频率域滤波方法受信号信噪比与噪声类型限制较大,对大地电磁时间序列进行处理的时间域滤波与变换域滤波是当前滤波的研究热点。这两种滤波所用的时间序列都包含着系统的影响,在滤波过程中难以根据信、噪的真实波形选取适合的去噪策略,且对信噪畸变后形成的假噪声的滤除会增加滤波过程对有效信号的损失。同时,部分噪声畸变后波形变得平缓而作为有效信号残留下来。因此,对系统响应的时间域、变换域滤波难以达到预期的滤波效果。
时间域阻抗估计方法作为传统频率域阻抗估计的一种补充,这种方法对噪声敏感性较弱、对数据稳定性要求较低,因此近年来对该方法在噪声干扰较严重区域的应用研究较多。但是,这种方法对含有系统影响的时间序列进行处理时,由于系统对电道与磁道的影响不同,在进行阻抗估计时这种影响不能被抵消,而是会随着递推式不断累积,最终导致目前的时间域阻抗估计结果中频点误差棒较大、尾支离散较严重,影响了该方法的处理效果。
发明内容
本发明的目的是提供一种大地电磁时间域标定方法及系统,能够直接对时间序列进行标定,具有减小滤波对有效信号的损失以及噪声的残留,增强时间域阻抗估计结果稳健性的优点。
为实现上述目的,本发明提供了如下方案:
一种大地电磁时间域标定方法,包括:
获取大地电磁测深仪中时间序列的系统响应、各频率的幅值校正量以及各频率的相位校正量;
根据所述幅值校正量和所述相位校正量确定标定的传输函数;
根据所述标定的传输函数采用傅里叶反变换方法确定标定的单位脉冲响应函数;
采用希尔伯特变换法确定所述系统响应的复数序列;
将所述单位脉冲响应函数与所述复数序列进行卷积操作,得到标定后的时间序列。
可选的,在所述将所述单位脉冲响应函数与所述复数序列进行卷积操作,得到标定后的时间序列,之后还包括:
将所述标定后的时间序列中前M项作为大地电磁时间域标定结果;所述M的个数与所述系统响应的序列长度相等。
可选的,所述根据所述标定的传输函数采用傅里叶反变换方法确定标定的单位脉冲响应函数,具体包括:
根据所述标定的传输函数确定双边谱传输函数;所述双边谱传输函数的公式如下:
式中,H'(ω)为双边谱传输函数,H(ω)为标定的传输函数,ω0为H(ω)频率范围上确界,ω为离散的角频率;
对所述双边谱传输函数采用三次样条插值法,得到插值后的传输函数;
对所述插值后的传输函数进行离散傅里叶反变换,得到单位脉冲响应函数;所述单位脉冲响应函数的公式如下:
式中,h(n)为单位脉冲响应函数,H"(ω)为插值后的传输函数,N为H"(ω)序列的长度,n为时间点自变量。
可选的,所述采用希尔伯特变换法确定所述系统响应的复数序列,具体包括:
对所述系统响应进行希尔伯特变换,得到系统响应对应的虚部序列;所述虚部序列的公式如下:
式中,y'(n)为系统响应对应的虚部序列,M为系统响应的序列长度,y(m)为第m个时间点的电磁场大小,n与m为不同的时间点,m为时间点卷积变量,n=1,2,3,...,M,m=1,2,3,...,M;
根据所述系统响应和所述系统响应对应的虚部序列确定所述系统响应的复数序列;所述复数序列的公式如下:
y"(n)=y(n)+iy'(n)
式中,y"(n)为自变量为n的复数序列,y(n)为系统响应。
可选的,
所述标定的传输函数公式如下:
H(ω)=A(ω)e
式中,H(ω)为标定的传输函数,A(ω)为幅值校正量,φ(ω)为相位校正量;
所述标定后的时间序列公式如下:
式中,y1(n)为标定后的时间序列,y"(m)为卷积变量为m的复数序列,h(n-m)为单位脉冲响应函数。
本发明还提供一种大地电磁时间域标定系统,包括:
数据获取模块,用于获取大地电磁测深仪中时间序列的系统响应、各频率的幅值校正量以及各频率的相位校正量;
标定的传输函数确定模块,用于根据所述幅值校正量和所述相位校正量确定标定的传输函数;
单位脉冲响应函数确定模块,用于根据所述标定的传输函数采用傅里叶反变换方法确定标定的单位脉冲响应函数;
复数序列确定模块,用于采用希尔伯特变换法确定所述系统响应的复数序列;
标定后的时间序列生成模块,用于将所述单位脉冲响应函数与所述复数序列进行卷积操作,得到标定后的时间序列。
可选的,所述系统,还包括:
大地电磁时间域标定结果生成模块,用于将所述标定后的时间序列中前M项作为大地电磁时间域标定结果;所述M的个数与所述系统响应的序列长度相等。
可选的,所述单位脉冲响应函数确定模块,具体包括:
双边谱传输函数确定单元,用于根据所述标定的传输函数确定双边谱传输函数;所述双边谱传输函数的公式如下:
式中,H'(ω)为双边谱传输函数,H(ω)为标定的传输函数,ω0为H(ω)频率范围上确界,ω为离散的角频率;
插值单元,用于对所述双边谱传输函数采用三次样条插值法,得到插值后的传输函数;
单位脉冲响应函数确定单元,用于对所述插值后的传输函数进行离散傅里叶反变换,得到单位脉冲响应函数;所述单位脉冲响应函数的公式如下:
式中,h(n)为单位脉冲响应函数,H"(ω)为插值后的传输函数,N为H"(ω)序列的长度,n为时间点自变量。
可选的,所述复数序列确定模块,具体包括:
希尔伯特变换单元,用于对所述系统响应进行希尔伯特变换,得到系统响应对应的虚部序列;所述虚部序列的公式如下:
式中,y'(n)为系统响应对应的虚部序列,M为系统响应的序列长度,y(m)为第m个时间点的电磁场大小,n与m为不同的时间点,m为时间点卷积变量,n=1,2,3,...,M,m=1,2,3,...,M;
复数序列确定单元,用于根据所述系统响应和所述系统响应对应的虚部序列确定所述系统响应的复数序列;所述复数序列的公式如下:
y"(n)=y(n)+iy'(n)
式中,y"(n)为自变量为n的复数序列,y(n)为系统响应。
可选的,
所述标定的传输函数公式如下:
H(ω)=A(ω)e
式中,H(ω)为标定的传输函数,A(ω)为幅值校正量,φ(ω)为相位校正量;
所述标定后的时间序列公式如下:
式中,y1(n)为标定后的时间序列,y"(m)为卷积变量为m的复数序列,h(n-m)为单位脉冲响应函数。
与现有技术相比,本发明的有益效果是:
本发明提出了一种大地电磁时间域标定方法及系统,通过获取大地电磁测深仪中时间序列的系统响应、各频率的幅值校正量以及各频率的相位校正量,根据幅值校正量和相位校正量确定标定的传输函数,根据标定的传输函数采用傅里叶反变换方法确定标定的单位脉冲响应函数,采用希尔伯特变换法确定系统响应的复数序列;将单位脉冲响应函数与复数序列进行卷积操作,得到标定后的时间序列,能够直接对时间序列进行标定,具有减小滤波对有效信号的损失以及噪声的残留,增强时间域阻抗估计结果稳健性的优点。
此外,通过将标定后的时间序列中前M项作为大地电磁时间域标定结果,保证标定后的时间序列的长度与系统响应的序列长度不发生改变,避免了所得结果中出现较大偏差或误差累积现象。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
图1为本发明实施例中大地电磁时间域标定方法流程图;
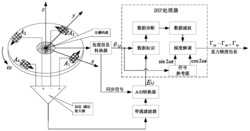
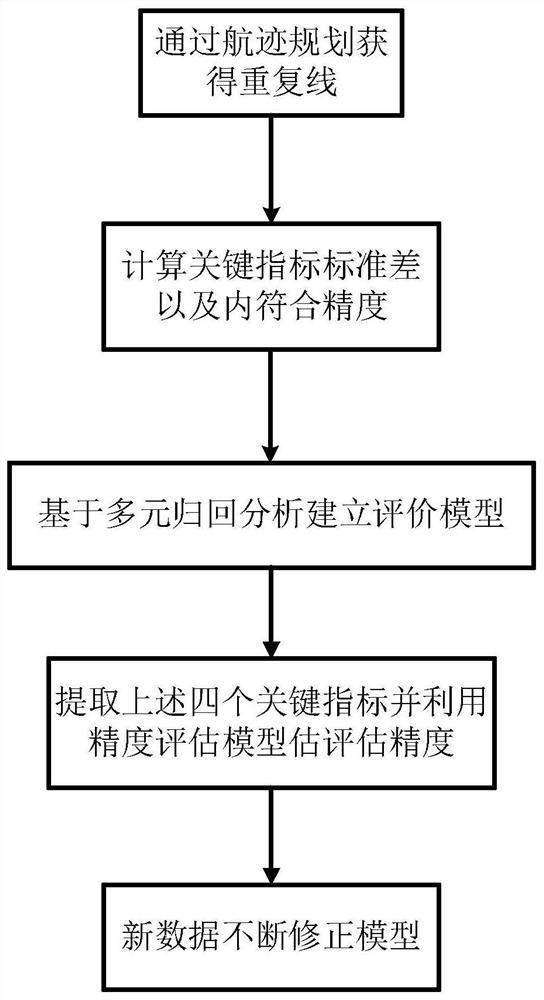
图2为本发明实施例中整体方法流程图;
图3为本发明实施例中大地电磁时间域标定系统结构图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明的目的是提供一种大地电磁时间域标定方法及系统,能够直接对时间序列进行标定,具有减小滤波对有效信号的损失以及噪声的残留,增强时间域阻抗估计结果稳健性的优点。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
实施例
图1为本发明实施例中大地电磁时间域标定方法流程图,如图1所示,本发明提供的一种大地电磁时间域标定方法,包括:
步骤101:获取大地电磁测深仪中时间序列的系统响应、各频率的幅值校正量以及各频率的相位校正量。
其中,从大地电磁测深仪中读取时间序列的系统响应为y、标定文件中各个频率的幅值校正量为A(ω)、相位校正量为φ(ω)(ω为离散的角频率)。
步骤102:根据幅值校正量和相位校正量确定标定的传输函数。
标定的传输函数公式如下:
H(ω)=A(ω)e
式中,H(ω)为标定的传输函数,ω0为H(ω)频率范围上确界。
步骤103:根据标定的传输函数采用傅里叶反变换方法确定标定的单位脉冲响应函数。
步骤103,具体包括:
根据标定的传输函数确定双边谱传输函数。即对H(ω)的频谱进行镜像拓展得到对应的双边谱传输函数。
进行频谱拓展的原因是:在离散傅里叶变换中离散单位脉冲响应函数对应的频谱为双边谱,因此在进行离散傅里叶反变换求单位脉冲响应时,为了保证求得的单位脉冲响应不缺失有效信息,需先把单边的H(ω)频谱进行镜像拓展。
双边谱传输函数的公式如下:
式中,H'(ω)为双边谱传输函数,H(ω)为标定的传输函数,ω0为H(ω)频率范围上确界,ω为离散的角频率;
对双边谱传输函数采用三次样条插值法,得到插值后的传输函数。
三次样条插值可以通过matlab里面的spline函数实现。插值的原因是:原始的H'(ω)频谱时按对数均匀分布的,而离散傅里叶反变换需要频率域传输函数是线性均匀分布的,因此这里通过插值实现频点的均匀分布。而三次样条插值相比于其他线性插值方法具有原理简单、插值结果光滑的优点,便于求得可靠的单位脉冲响应函数。
对插值后的传输函数进行离散傅里叶反变换,得到单位脉冲响应函数;单位脉冲响应函数的公式如下:
式中,h(n)为单位脉冲响应函数,H"(ω)为插值后的传输函数,N为H"(ω)序列的长度或者说是频点数,n为时间点自变量。
步骤104:采用希尔伯特变换法确定系统响应的复数序列。
步骤104,具体包括:
对系统响应进行希尔伯特变换,得到系统响应对应的虚部序列。
对于任何一个复数序列,其实部与虚部之间都存在Hilbert变换的关系,即可以通过实部进行Hilbert变换求得其虚部。这里是将大地电磁测深仪导出的实序列看作是某一复数序列的实部。
虚部序列的公式如下:
式中,y'(n)为系统响应对应的虚部序列,M为系统响应的序列长度,y(m)为第m个时间点的电磁场大小,n与m为不同的时间点,m为时间点卷积变量,n=1,2,3,...,M,m=1,2,3,...,M。
根据系统响应和系统响应对应的虚部序列确定系统响应的复数序列。
构建复数序列的目的是:由于步骤103求得的单位脉冲响应函数是复数序列,其包含着时间域相位校正信息,为了实现对系统响应y相位的校正,需先求得其对应的复数序列,然后再进行卷积。
复数序列的公式如下:
y"(n)=y(n)+iy'(n)
式中,y"(n)为自变量为n的复数序列,y(n)为系统响应。由于Hilbert变换不改变离散序列长度,因此y"的长度也为M。
步骤105:将单位脉冲响应函数与复数序列进行卷积操作,得到标定后的时间序列。
标定后的时间序列公式如下:
式中,y1(n)为标定后的时间序列,y"(m)为卷积变量为m的复数序列,h(n-m)为单位脉冲响应函数,单位脉冲响应函数的长度为N。
步骤106:将标定后的时间序列中前M项作为大地电磁时间域标定结果;M的个数与系统响应的序列长度相等。
因为步骤105的离散卷积得到的序列长度为N+M,为了不使标定前后的时间序列长度发生改变,这里根据离散卷积定理取前M项作为标定结果。取该结果进行滤波处理与时间域阻抗估计,便避免了所得结果中出现较大偏差或误差累积现象。
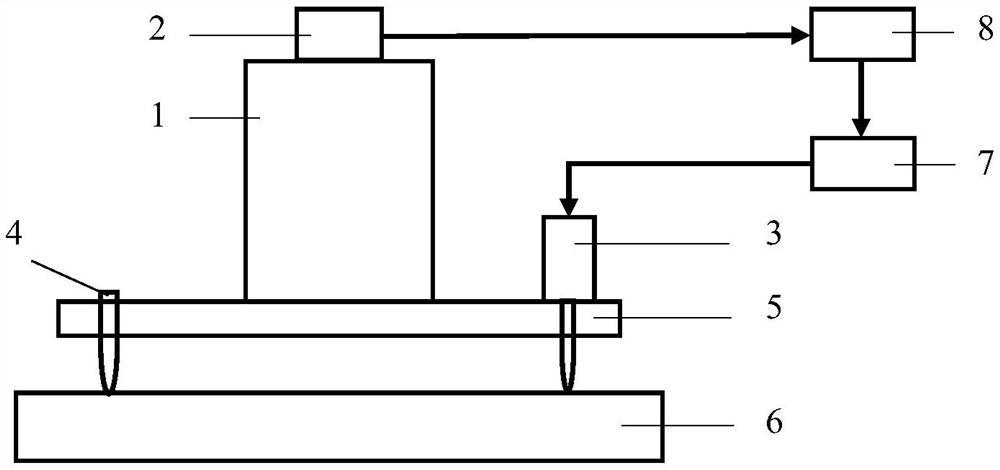
图2为本发明实施例中整体方法流程图,如图2所示,y为由大地电磁测深仪导出的系统响应,y’为y对应的虚部序列,y”为y对应的复数序列,A为频率域幅值校正量, 为频率域相位校正量,H为标定过程的传输函数,H’为H进行频谱扩展得到的双边谱传输函数,H”为H’插值所得传输函数,h为标定的单位脉冲响应函数。
为了校正系统对时间域、变换域滤波方法以及时间域阻抗估计结果的影响,需要对含有系统影响的时间序列进行标定。本发明在传统频率域标定方法的基础上,将系统等效为一个滤波器,使用标定文件的频率域幅值校正量与相位校正量求得标定的频率域传输函数,对传输函数进行离散傅里叶反变换求得标定的单位脉冲响应。同时,本发明进行了频谱扩展、插值以及实虚部转换等操作,保证了求得单位脉冲响应函数的可靠性。基于频率域的相乘对应于时间域的卷积的关系,使用单位脉冲响应函数与时间序列的卷积可以实现对时间序列中系统影响的校正,从而达到恢复时间序列中畸变的信噪波形、改善滤波与阻抗估计结果的目的。
图3为本发明实施例中大地电磁时间域标定系统结构图。如图3所示,一种大地电磁时间域标定系统,包括:
数据获取模块201,用于获取大地电磁测深仪中时间序列的系统响应、各频率的幅值校正量以及各频率的相位校正量。
标定的传输函数确定模块202,用于根据幅值校正量和相位校正量确定标定的传输函数。
标定的传输函数公式如下:
H(ω)=A(ω)e
式中,H(ω)为标定的传输函数,A(ω)为幅值校正量,φ(ω)为相位校正量。
单位脉冲响应函数确定模块203,用于根据标定的传输函数采用傅里叶反变换方法确定标定的单位脉冲响应函数。
单位脉冲响应函数确定模块203,具体包括:
双边谱传输函数确定单元,用于根据标定的传输函数确定双边谱传输函数;双边谱传输函数的公式如下:
式中,H'(ω)为双边谱传输函数,H(ω)为标定的传输函数,ω0为H(ω)频率范围上确界,ω为离散的角频率;
插值单元,用于对双边谱传输函数采用三次样条插值法,得到插值后的传输函数;
单位脉冲响应函数确定单元,用于对插值后的传输函数进行离散傅里叶反变换,得到单位脉冲响应函数;单位脉冲响应函数的公式如下:
式中,h(n)为单位脉冲响应函数,H"(ω)为插值后的传输函数,N为H"(ω)序列的长度,n为时间点自变量。
复数序列确定模块204,用于采用希尔伯特变换法确定系统响应的复数序列。
复数序列确定模块204,具体包括:
希尔伯特变换单元,用于对系统响应进行希尔伯特变换,得到系统响应对应的虚部序列;虚部序列的公式如下:
式中,y'(n)为系统响应对应的虚部序列,M为系统响应的序列长度,y(m)为第m个时间点的电磁场大小,n与m为不同的时间点,m为时间点卷积变量,n=1,2,3,...,M,m=1,2,3,...,M。
复数序列确定单元,用于根据系统响应和系统响应对应的虚部序列确定系统响应的复数序列;复数序列的公式如下:
y"(n)=y(n)+iy'(n)
式中,y"(n)为自变量为n的复数序列,y(n)为系统响应。
标定后的时间序列生成模块205,用于将单位脉冲响应函数与复数序列进行卷积操作,得到标定后的时间序列。
标定后的时间序列公式如下:
式中,y1(n)为标定后的时间序列,y"(m)为卷积变量为m的复数序列,h(n-m)为单位脉冲响应函数。
大地电磁时间域标定结果生成模块206,用于将标定后的时间序列中前M项作为大地电磁时间域标定结果;M的个数与系统响应的序列长度相等。
对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
本发明的大地电磁时间域标定方法相比于现有的频率域标定方法,能够直接对时间序列进行标定。通过对时间序列中畸变波形的校正:①可有效改善目前基于形态识别的大地电磁时间域、变换域滤波方法的效果,减小滤波对有效信号的损失以及噪声的残留;②压制时间域阻抗估计结果中的累积误差、减小频点误差棒并减小频点离散,从而增强时间域阻抗估计结果的稳健性。
本发明的优点主要来源于:①大地电磁时间域标定使用单位脉冲响应函数与时间序列卷积运算的方式,克服了传统标定方法只能在频率域进行的缺点,因此可以实现对时间序列的标定;②大地电磁时间域标定方法校正了时间序列中的畸变波形,因此基于噪声形态识别的时间域与变换域滤波方法可根据信、噪的真实形态选择滤波策略,从而减少了传统滤波过程对有效信号的损失,以及噪声的残留;③大地电磁时间域标定方法校正了系统对电道与磁道信息的畸变作用,因此在使用正交的电道与磁道递推地进行时间域阻抗估计时,本发明防止了系统影响随着递推不断累积的现象,即本发明可以有效抑制时间域阻抗估计结果中的累积误差,从而使得阻抗结果误差棒减小,频点离散减小。
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上,本说明书内容不应理解为对本发明的限制。
一种大地电磁时间域标定方法及系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0