








专利摘要
本发明公开了一种光纤重力梯度仪及重力梯度测量方法。本发明光纤重力梯度仪包括光信号相位调制器,干涉仪光路系统,用于接收光信号相位调制器输出调制后的信号光并产生干涉,其中该干涉仪光路系统的干涉光路上设有一光纤重力梯度探头,该光纤重力梯度探头与一驱动源连接,该驱动源用于控制该光纤重力梯度探头在竖直方向上振动,从而使该光纤重力梯度探头所在光路上的信号光相位变化;光电探测器,用于接收该干涉仪光路系统输出的信号光并将其转换为电信号;模数转换器将所述电信号转换为数字信号,并发送给解调系统进行解算,得到重力梯度。本发明可大大降低重力梯度的探测要求,快速、准确地测定重力梯度。
权利要求
1.一种光纤重力梯度仪,其特征在于,包括
光信号相位调制器,用于对输入的信号光进行光信号相位调制以提高信号的抗干扰特性;
干涉仪光路系统,用于接收光信号相位调制器输出调制后的信号光并产生干涉,其中该干涉仪光路系统的干涉光路上设有一光纤重力梯度探头,该光纤重力梯度探头与一驱动源连接,该驱动源用于控制该光纤重力梯度探头在竖直方向上振动,从而使该光纤重力梯度探头所在光路上的信号光相位变化;
光电探测器,用于接收该干涉仪光路系统输出的信号光并将其转换为电信号;
模数转换器,与该光电探测器的输出端连接,用于将所述电信号转换为数字信号,并发送给解调系统进行解算,得到重力梯度。
2.如权利要求1所述的光纤重力梯度仪,其特征在于,所述光纤重力梯度探头包括一定子和一质量块,定子与质量块之间通过光纤缠绕束缚;该光纤重力梯度探头所在光路上的信号光从该光纤的一端输入、另一端输出。
3.如权利要求2所述的光纤重力梯度仪,其特征在于,该定子为一倒置的U型结构,开口固定于地面上,该质量块位于该定子的U型底部下方;该定子的U型底部与质量块之间通过所述光纤缠绕束缚。
4.如权利要求2或3所述的光纤重力梯度仪,其特征在于,所述质量块由比重大、物理化学性质稳定的固体或液体组成。
5.如权利要求2或3所述的光纤重力梯度仪,其特征在于,所述光纤为弯曲不敏感单模光纤或保偏光纤。
6.如权利要求2所述的光纤重力梯度仪,其特征在于,所述解调系统根据收到的信息计算出振动时干涉光路的光信号相位变化Δφ,然后通过公式
7.如权利要求6所述的光纤重力梯度仪,其特征在于,所述光信号相位变化Δφ包括光纤轴向伸长带来的相移和应力应变效应带来的相移。
8.一种重力梯度测量方法,其步骤包括:
1)利用光信号相位调制器对输入的信号光进行调制以提高信号的抗干扰特性;然后将调制后的光信号输入干涉仪光路系统;
2)干涉仪光路系统对调制后的信号光产生干涉并输入到光电探测器;其中该干涉仪光路系统的干涉光路上设有一光纤重力梯度探头,该光纤重力梯度探头与一驱动源连接,该驱动源用于控制该光纤重力梯度探头在竖直方向上振动,从而使该光纤重力梯度探头所在光路上的信号光相位变化;
3)光电探测器接收该干涉仪光路系统输出的信号光并将其转换为电信号后输入模数转换器;
4)模数转换器将所述电信号转换为数字信号,并发送给解调系统进行解算,得到重力梯度。
9.如权利要求8所述的方法,其特征在于,所述光纤重力梯度探头包括一定子和一质量块,定子与质量块之间通过光纤缠绕束缚;该光纤重力梯度探头所在光路上的信号光从该光纤的一端输入、另一端输出。
10.如权利要求9所述的方法,其特征在于,所述解调系统根据收到的信息计算出振动时干涉光路的光信号相位变化Δφ,然后通过公式
说明书
技术领域
本发明涉及一种光纤重力梯度仪及重力梯度测量方法,可用于卫星、航空、陆地、水下的地球重力梯度场测量,也适用于矿产资源开发、地质与地球物理勘探、地热田监测、地质灾害预警、地球深部构造研究、海洋学与气候学、惯性导航、军事反潜等工程及科研领域。
背景技术
地球空间存在着许多地球物理场,地球重力场就是其中之一。该场的基本物理场量为重力加速度,一般用符号 表示。
根据一个力与其对应位势的一般关系,重力加速度 等于重力位W的梯度:
其中: 为哈密顿算子,
对重力加速度求取某方向的方向导数,即可得到重力加速度沿该方向的变化率,这一类方向导数称为重力梯度。重力梯度在数学形式上是重力位的二阶导数,在直角坐标系下,共有九个重力梯度分量,这些分量组成了一个梯度张量Γ,其表达式为:
式(2)所示的张量中,各个分量均表示一个重力梯度,且张量内的元素关于对角线对称,即Wxy=Wyx、Wxz=Wzx、Wyz=Wzy。上述所有重力梯度分量构成了地球重力梯度场。
重力梯度的常用单位为厄缶,符号为E,E与SI单位制的换算关系为:1E=10
目前,重力梯度仪的测量方案主要有两大类:扭矩法和差分法。
扭矩法的应用时间最早。19世纪90年代,匈牙利物理学家厄缶( 1848-1919)针对重力梯度测量设计了一种扭秤,用以测量水平方向上的重力梯度,该扭秤是历史上第一台重力梯度仪。不过,使用这种扭秤获取一个点的重力梯度的时间较长,且受地形影响大。扭矩法的核心思想为利用力矩平衡方程测量重力梯度,该方法为间接通过力矩测量,一旦中间起到传带作用的因素发生变化(如弹性不稳定),将严重影响到重力梯度解算值的精度;且由于间接测量量(即角度)的精度不够高,重力梯度的解算值精度也将受到影响;另外,该方法引入了一定的人为主观误差因素,比如机械扭摆横杆的定向。
差分法的核心思想为:先通过具有一致性的器件获取某几点的总加速度值或重力值。对于前者,通过合理的设计使重力梯度包含在某个表达式中,而后通过改变姿态,获得若干包含重力梯度的其它表达式,最后通过计算,求解重力梯度;对于后者,通过合理的设计或者一定的计算,将重力加速度信息保留下来,而后将两点间的重力加速度值做差分,并与梯度方向的距离相除,即得到该方向的重力梯度。以重力垂直梯度为例,如附图1所示,其中A、B分别代表两台重力仪(A点和B点同处于竖直方向(图示的z方向)上,两点在水平方向无平移),垂向相距h,分别测得的重力加速度为gA和gB。根据差分法测量重力梯度的原理,重力垂直梯度 根据位场理论:
由式(3)可见,当仪器空间内的重力梯度不均匀时,通过差分法求得的重力梯度只是重力曲线上两点割线的斜率,而非重力曲线的切线斜率(即重力梯度);从数学的角度来看,由于重力梯度是重力的导数,根据泰勒展开式形式,差分法求得的只是重力梯度的一阶近似,而非重力梯度真值;此外,由于该方法需要使用多个重力加速度装置,各个内部装置之间的一致性是不可回避的一个问题。
光纤传感是光学原理传感中一种使用光纤作为光传输波导的信号探测手段,具有光学传感高精度的优势,也就是说,在光纤中实现光学传感原理,理论上完全可以做到重力梯度的高精度探测。
由于光纤一般采用绝缘的玻璃(成分为SiO2)制成,故外界的电磁干扰(Electromagnetic Interference,EMI)无法通过电磁感应原理在光纤内部产生感应电流,这就意味着外界电磁干扰不会像影响电导线一样影响光纤,即光纤可以抵抗EMI干扰,适合运用于矿井等强EMI环境。
此外,光纤的尺寸小、重量轻,适用于对载荷或尺寸有要求的军事领域,如运用于卫星上时,过重的载荷将增加助推火箭的设计难度,而采用光纤传感器在材料上则领先一筹。相比于电传感,由于光纤不具有导电性(电绝缘),故不需要进行保护性的接地处理,而且不会有高压电带来的潜在风险。因而采用光纤传感,安全性能方面将得到提升。
由于石英的一系列优异性质,石英光纤还具有如下优势:热稳定性好,在温度为1000℃的环境下,仍能保持很好的形态,不会变形;具有较低的热膨胀系数,因而对于一般的热冲击具有很好的抵抗破损能力;化学性质稳定,且耐腐蚀,可适用于较为恶劣的环境。
发明内容
针对现有技术中存在的技术问题,本发明的目的在于提供一种光纤重力梯度仪,该仪器的系统框图如附图2所示。信号光从光源激发,经过调制信号源进行光信号相位调制以提高信号的抗干扰特性,降低噪声对信号的影响;之后经过干涉仪光路系统和重力梯度探头,探头受驱动源控制在竖直方向上振动,这一振动受到重力梯度影响将产生振幅上的变化,从而导致信号光相位受到影响;通过PD(光电探测器)将信号光转换为电信号,并通过ADC(模数转换器)转换为数字信号,并通过解调,从受重力梯度影响的信号光中解算出重力梯度。
本发明的技术方案为:
一种光纤重力梯度仪,其特征在于,包括
光信号相位调制器,用于对输入的信号光进行光信号相位调制以提高信号的抗干扰特性;
干涉仪光路系统,用于接收光信号相位调制器输出调制后的信号光并产生干涉,其中该干涉仪光路系统的干涉光路上设有一光纤重力梯度探头,该光纤重力梯度探头与一驱动源连接,该驱动源用于控制该光纤重力梯度探头在竖直方向上振动,从而使该光纤重力梯度探头所在光路上的信号光相位变化;
光电探测器,用于接收该干涉仪光路系统输出的信号光并将其转换为电信号;
模数转换器,与该光电探测器的输出端连接,用于将所述电信号转换为数字信号,并发送给解调系统进行解算,得到重力梯度。
进一步的,所述光纤重力梯度探头包括一定子和一质量块,定子与质量块之间通过光纤缠绕束缚;该光纤重力梯度探头所在光路上的信号光从该光纤的一端输入、另一端输出。
进一步的,该定子为一倒置的U型结构,开口固定于地面上,该质量块位于该定子的U型底部下方;该定子的U型底部与质量块之间通过所述光纤缠绕束缚。
进一步的,所述质量块由比重大、物理化学性质稳定的固体或液体组成。
进一步的,所述光纤为弯曲不敏感单模光纤或保偏光纤。
进一步的,所述解调系统根据收到的信息计算出振动时干涉光路的光信号相位变化Δφ,然后通过公式 计算得到振动引起的所述光纤长度变化ΔL;然后根据公式 计算得到重力梯度 其中ΔL=x(t),光纤折射率为n,λ为光信号的波长,N为定子与质量块之间缠绕的光纤匝数,A为驱动源的最大驱动加速度。
进一步的,所述光信号相位变化Δφ包括光纤轴向伸长带来的相移和应力应变效应带来的相移。
一种重力梯度测量方法,其步骤包括:
1)利用光信号相位调制器对输入的信号光进行调制以提高信号的抗干扰特性;然后将调制后的光信号输入干涉仪光路系统;
2)干涉仪光路系统对调制后的信号光产生干涉并输入到光电探测器;其中该干涉仪光路系统的干涉光路上设有一光纤重力梯度探头,该光纤重力梯度探头与一驱动源连接,该驱动源用于控制该光纤重力梯度探头在竖直方向上振动,从而使该光纤重力梯度探头所在光路上的信号光相位变化;
3)光电探测器接收该干涉仪光路系统输出的信号光并将其转换为电信号后输入模数转换器;
4)模数转换器将所述电信号转换为数字信号,并发送给解调系统进行解算,得到重力梯度。
本发明中光纤干涉仪大致可以分为四种:迈克尔逊(Michelson)干涉仪、马赫-曾德尔(Mach-Zehnder)干涉仪、法布里-佩罗(Fabry–Pérot)干涉仪和萨格纳克(Sagnac)干涉仪。若是Michelson干涉仪、Mach-Zehnder干涉仪,则干涉仪光路系统包括两条光路,其中一条光路上连接重力梯度探头(该条光路的信号输入端口5,然后由端口6输出);若是Fabry–Pérot干涉仪、Sagnac干涉仪,则干涉仪光路系统包括一条光路,光路上连接重力梯度探头(该条光路的信号输入端口5,然后由端口6输出。干涉仪光路系统的功能是对调制后的信号光产生干涉。PD对干涉仪光路系统输出的干涉光进行探测。
本发明提供的光纤重力梯度仪基于光信号测量重力梯度,在传感时(即重力梯度作用时)信号在光纤中传输,基于光纤本身的特性,可抗电磁干扰、耐腐蚀,可适用于较为恶劣的环境;由于为光信号,传输速度快,可实现快速测量;基于干涉仪光路系统的光传感方式可大大提升探测精度,适用于重力梯度的高精度探测需求。
本发明的实施方式如下:
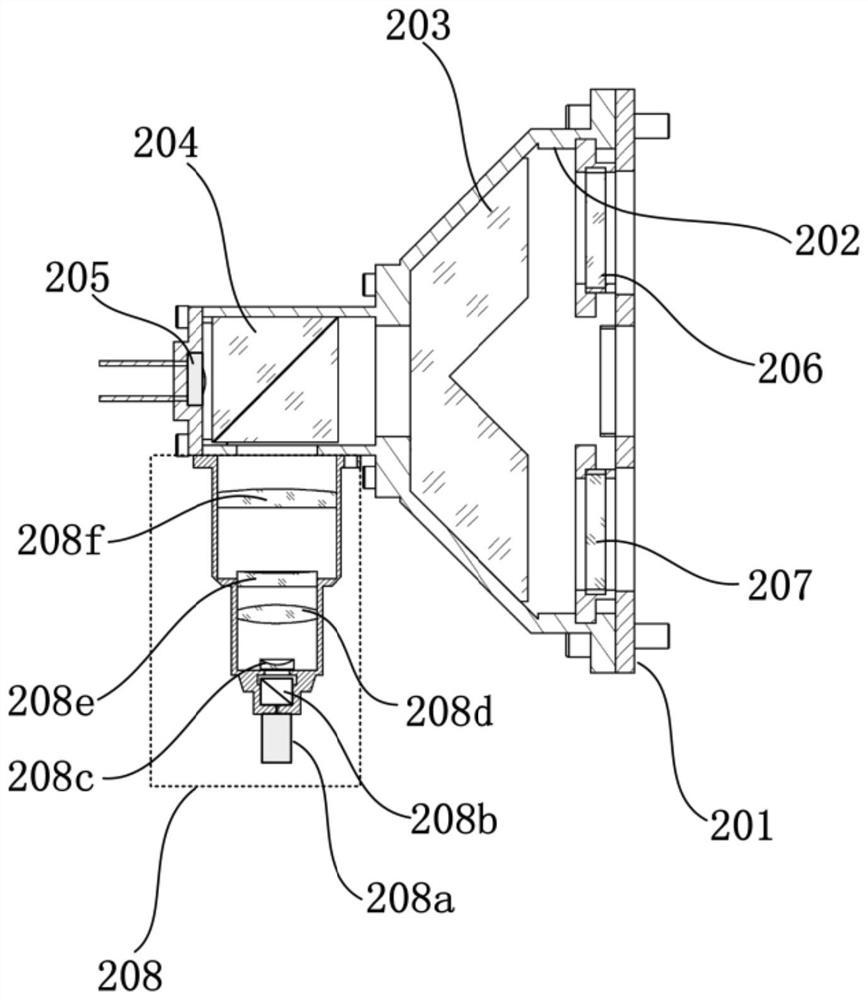
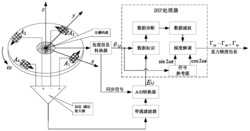
如附图3所示,N匝光纤3一端绑缚于定子1上,另一端绑缚于质量块2上。在放上质量块2时,光纤处于拉伸状态,但距离拉伸极限还有一定距离。
探头驱动源4给质量块2以直接驱动,设其驱动加速度为正弦方式,其调制加速度如式(4)所示:
aT(t)=Asin(ωt)(4)
其中A为最大驱动加速度。
由于振动过程中,除了直接驱动等效力作用外,还有重力在作用。设平衡位置处的重力加速度为g0,质量块质心所处竖直位置为x(t),由于重力存在垂直方向的重力梯度 故重力加速度表达式为:
由于重力加速度与驱动加速度为质量块的合加速度,故:
解得该方程的稳态响应解为:
设缠绕的光纤长度为L,光纤折射率为n,光在光纤中的传播系数为k=2π/λ,其中λ为光波波长,则光信号通过传感臂的相位变化为:
φ=2nkL(8)
对该式进行全微分:
其中,第一项为光纤轴向伸长带来的相移,第二项为应力应变效应(应力导致光纤折射率变化)带来的相移,第三项为泊松效应(光纤直径变化)带来的相移。一般泊松效应相较于前两种效应可忽略,从而
由于应力应变效应带来的光信号相位改变为78.4%,并考虑到光纤有N匝,故:
其中λ为光源波长。
对于附图3所示的结构,光纤束缚在定子和质量块上,由于静置时光纤处于拉伸状态,故ΔL=x(t),那么通过式(7)、式(11),即可从光信号相位的变化中解出重力梯度。即本发明先测量出Δφ,然后通过公式(11)计算得到ΔL,根据ΔL=x(t)得到x(t)值,然后根据公式(7)计算得到
与现有技术相比,本发明的积极效果为:
本发明提供一种光纤重力梯度仪。这种重力梯度仪为绝对重力梯度仪,可以克服扭矩法重力梯度仪受地形影响大、耗时过长的局限性;同时,也可以克服差分法在原理上的一阶近似,测得的为重力曲线切线斜率,且无需多个装置完成重力梯度的测量,克服了关于内部装置一致性的局限性。相比于以上两种方法,光纤重力梯度仪还具有光纤传感特有的抗EMI、高稳定性等优势,且能适用于更为恶劣的野外环境中,可大大降低重力梯度的探测要求,快速、准确地测定重力梯度。
附图说明
图1为差分法重力梯度仪基本原理图;
图2为光纤重力梯度仪框架图;
图3为光纤重力梯度仪探头部分示意图;
其中:1-定子,2-高密度质量块,3-光纤,4-探头驱动源,5-输入端口,6-输出端口。
具体实施方式
下面结合附图对本发明进行进一步详细描述。
光纤重力梯度仪框架如附图2所示,信号光从光源激发,经过利用相位调制器(比如压电陶瓷、Y波导集成光路器件)对信号源进行光信号相位调制以提高信号的抗干扰特性,降低噪声对信号的影响;之后通过干涉仪光路系统和重力梯度探头,探头受驱动源控制在竖直方向上振动,这一振动受到重力梯度影响将产生振幅上的变化,从而导致信号光相位受到影响;通过PD(光电探测器)将信号光转换为电信号,并通过ADC(模数转换器)转换为数字信号,并通过解调系统的解算,从受重力梯度影响的信号光中解算出重力梯度。
光纤重力梯度仪探头如附图3所示:定子1需固定于水平地面上;高密度质量块2由比重大、物理化学性质稳定的固体或液体组成,包括90WNiCu合金;光纤3可采用弯曲不敏感单模光纤或保偏光纤,紧密缠绕束缚于定子1、高密度质量块2之间;探头驱动源4包括音圈电机或压电陶瓷电机,用于给高密度质量块2提供直接驱动;光信号从输入端口5进入探头光纤,从输出端口6离开重力梯度探头光路部分。之后,光信号通过PD(光电探测器)将信号光转换为电信号,并通过ADC(模数转换器)转换为数字信号,并通过解调,从受重力梯度影响的信号光中解算出重力梯度。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
一种光纤重力梯度仪及重力梯度测量方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0