











专利摘要
本发明公开了一种基于卷积神经网络的光学扫描全息图像识别技术,属于光学扫描全息与深度学习领域,主要解决了光学扫描全息图像识别问题。本发明利用卷积神经网络对全息图进行识别。本发明有效地,智能化地实现了光学扫描全息的识别问题。这种全息图识别的方法适用于各个领域。
权利要求
1.一种基于卷积神经网络的光学扫描全息图像识别方法,其特征在于,包括以下步骤:
步骤1.首先,角频率为ω0的激光被第一分束器分成两束方向不同的光路,其中一束光在声光调制器的作用下,角频率变为ω0+Ω,再通过反光镜,第一光瞳和第一凸透镜变成球面波;同时,另一束光通过反射镜,第二光瞳和第二凸透镜;
步骤2.频率为ω0+Ω的球面波和频率为ω0的平面波在第二分束器处干涉形成实时菲涅尔波带板,然后再通过X-Y扫描振镜对物体进行扫描,置于物体后的光电探测器接收物体的透射光,最后经过解调得到全息图;
步骤3.重复步骤1和步骤2,以此获得N幅全息图;统一对N幅全息图的文件名进行处理,每一张图像名称修改为对应的全息图标签;
步骤4.利用获得的全息图以及对应的标签作为训练数据,训练一个能够识别全息图的模型。
2.根据权利要求1所述的基于卷积神经网络的光学扫描全息图像识别方法,其特征在于,步骤2中获得全息图的具体过程如下:
步骤2-1.光波在第二分束器处汇聚干涉形成菲涅尔波带板,再通过X-Y扫描振镜对物体进行扫描,该过程的光学传递函数为:
其中,x和y表示待测物体的位置,x′和y′为积分变量,z表示x-y扫描振镜到待测物体的距离,λ表示光波波长, 表示波数,第一凸透镜和第二凸透镜的焦距均为f,kx和ky表示频域坐标,上标*表示共轭, p1(x,y)和p2(x,y)分别为第一光瞳函数和第二光瞳函数;
采用传统光瞳函数,p1(x,y)=δ(x,y),p2(x,y)=1,δ为冲激函数,则光学传递函数可表示为:
步骤2-2.菲涅尔波带板对3-D物体进行2-D扫描,置于物体后的光电探测器接受物体的透射光并将其转化为电信号,传到电脑端,得到全息图,物体的全息图函数可写成:
g(x,y)=F-1{F[O(x,y;z0)]·OTF(kx,ky;z0)}
其中,z0为物体所在位置,F和F-1分别表示傅里叶变换和逆傅里叶变换,O(x,y;z0)表示物体的振幅函数。
3.根据权利要求2所述的基于卷积神经网络的光学扫描全息图像识别方法,其特征在于,步骤4的具体过程为:
步骤4-1.将步骤3得到的N幅全息图依次顺时针旋转90°以扩充训练图像数据,并修改每一张全息图标签,以此得到训练标签;
步骤4-2.利用旋转前后得到的2*N幅全息图及其对应的标签作为训练数据,训练卷积神经网络得到一个可以识别全息图的模型,记为函数Model。
4.根据权利要求3所述的基于卷积神经网络的光学扫描全息图像识别方法,其特征在于,卷积神经网络结构依次如下:
Input:输入层,即全息图;Layerl:卷积层1,包含32个3x3的卷积核,2x2的池化层,以及Re LU激活函数;Layer2:卷积层2,包含64个3x3的卷积核,2x2的池化层,以及Re LU激活函数;FCl:全连接层1,包含256个神经元;Output:输出层,包含10个神经元,即为标记的10类。
说明书
技术领域
本发明属于光学扫描全息与深度学习技术领域,具体涉及一种基于卷积神经网络的光学扫描全息图像识别方法。
背景技术
光学扫描全息术(OSH)是一种独特的实时全息技术,它利用二维光学扫描原理来获得一个三维物体的全息图。OSH作为一个3-D成像技术,在很多领域里具有应用,如3-D遥感,机器人视觉,模式识别等领域。
近年来,研究深度学习成为了国内外学者的一个热点,其动机在于建立,模拟人脑进行分析学习的神经网络,模仿人脑的机制来解释数据,例如图像,文本和声音。目前已经有研究学者利用深度学习来解决图像识别问题,因此,结合深度学习解决光学扫描全息图识别问题也成了近年来的研究热点之一。
文献“Deep Residual Learning for Image Recognition”、文献“Image Recognition Technology Based on Deep Learning”和文献“Deep Residual Net with Transfer Learning for Image-based Structural Damage Recognition Deep Residual Network with Transfer Learning”都提出了利用深度学习来进行图像识别。但是,目前还未有学者结合深度学习来处理全息图识别问题。
发明内容
本发明的目的是克服上述现有技术的缺陷,提供一种基于卷积神经网络的光学扫描全息图像识别方法,利用卷积神经网络,通过一系列的样本训练,实现全息图像识别。
本发明所提出的技术问题是这样解决的:
一种基于卷积神经网络的光学扫描全息图像识别方法,包括以下步骤:
步骤1.首先,角频率为ω0的激光被第一分束器BS1分成两束方向不同的光路,其中一束光在声光调制器AOFS的作用下,角频率变为ω0+Ω,再通过反光镜M1,第一光瞳p1(x,y) 和第一凸透镜L1变成球面波;同时,另一束光通过反射镜M2,第二光瞳p2(x,y)和第二凸透镜L2;
步骤2.频率为ω0+Ω的球面波和频率为ω0的平面波在第二分束器BS2处干涉形成实时菲涅尔波带板,然后再通过X-Y扫描振镜对物体进行扫描,置于物体后的光电探测器接收物体的透射光,最后经过解调得到全息图;
步骤3.重复步骤1和步骤2,以此获得N幅全息图;统一对N幅全息图的文件名进行处理,每一张图像名称修改为对应的全息图标签;
步骤4.利用获得的全息图以及对应的标签作为训练数据,训练一个能够识别全息图的模型。
其中,步骤2中获得全息图的具体过程如下:
步骤2-1.光波在第二分束器BS2处汇聚干涉形成菲涅尔波带板,再通过X-Y扫描振镜对物体进行扫描,该过程的光学传递函数为:
其中,x和y表示待测物体的位置,x′和y′为积分变量,z表示x-y扫描振镜到待测物体的距离,λ表示光波波长, 表示波数,第一凸透镜和第二凸透镜的焦距均为f,kx和ky表示频域坐标,上标*表示共轭, p1(x,y)和p2(x,y)分别为第一光瞳函数和第二光瞳函数;
这里采用传统光瞳函数,p1(x,y)=δ(x,y),p2(x,y)=1,δ为冲激函数,则光学传递函数可表示为:
步骤2-2.菲涅尔波带板对3-D物体进行2-D扫描,置于物体后的光电探测器接受物体的透射光并将其转化为电信号,传到电脑端,得到全息图,物体的全息图函数可写成:
g(x,y)=F-1{F[O(x,y;z0)]·OTF(kx,ky;z0)}
其中,z0为物体所在位置,F和F-1分别表示傅里叶变换和逆傅里叶变换,O(x,y;z0)表示物体的振幅函数。
步骤4的具体过程为:
步骤4-1.将步骤3得到的N幅全息图依次顺时针旋转90°以扩充训练图像数据,并修改每一张全息图标签,以此得到训练标签;
步骤4-2.利用旋转前后得到的2*N幅全息图及其对应的标签作为训练数据,训练卷积神经网络得到一个可以识别全息图的模型,记为函数Model。
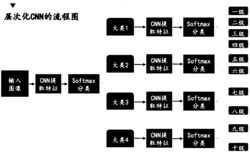
卷积神经网络结构依次如下:
Input:输入层,即全息图;Layer1:卷积层1,包含32个3x3的卷积核,2x2的池化层,以及Re LU激活函数;Layer2:卷积层2,包含64个3x3的卷积核,2x2的池化层,以及Re LU 激活函数;FC1:全连接层1,包含256个神经元;Output:输出层,包含10个神经元,即为标记的10类。
本发明的有益效果是:
(1)本发明构造了一个能够识别全息图的卷积神经网络模型,能够有效的识别全息图;
(2)本发明较于现有的传统方法更有效,效果更佳;
(3)本发明不仅操作简单,效率高,而且具有很强的实用性。
附图说明
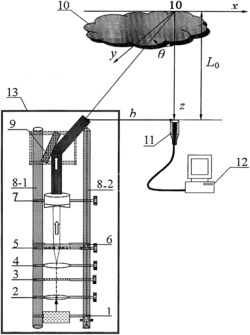
图1为本发明实施例采用的实验结构图;
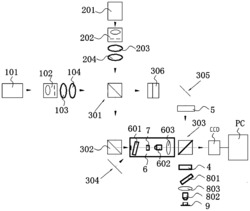
图2为本发明实施例采用的扫描物体;
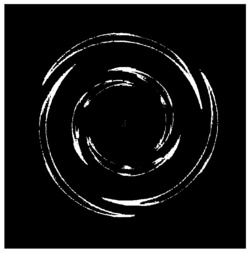
图3为本发明实施例获得的全息图;
图4为本发明实施例采用的卷积神经网络模型;
图5为本发明实施例在训练样本和验证样本下的误差值;
图6为本发明实施例在训练样本和验证样本下的准确值。
具体实施方式
下面结合附图和实施例对本发明进行进一步的说明。
本实施例提供一种基于卷积神经网络的光学扫描全息图像识别方法,其采用的实验结构图如图1所示,扫描物体如图2所示,包括以下步骤:
步骤1.首先,角频率为ω0的激光被第一分束器BS1分成两束方向不同的光路,其中一束光在声光调制器AOFS的作用下,角频率变为ω0+Ω,再通过反光镜M1,第一光瞳p1(x,y) 和第一凸透镜L1变成球面波;同时,另一束光通过反射镜M2,第二光瞳p2(x,y)和第二凸透镜L2;
步骤2.频率为ω0+Ω的球面波和频率为ω0的平面波在第二分束器BS2处干涉形成实时菲涅尔波带板,然后再通过X-Y扫描振镜对物体进行扫描,置于物体后的光电探测器接收物体的透射光,最后经过解调得到全息图,获得的全息图如图3所示;
步骤2中获得全息图的具体过程如下:
步骤2-1.光波在第二分束器BS2处汇聚干涉形成菲涅尔波带板,再通过X-Y扫描振镜对物体进行扫描,该过程的光学传递函数为:
其中,x和y表示待测物体的位置,x′和y′为积分变量,z表示x-y扫描振镜到待测物体的距离,λ表示光波波长, 表示波数,第一凸透镜和第二凸透镜的焦距均为f,kx和ky表示频域坐标,上标*表示共轭, p1(x,y)和p2(x,y)分别为第一光瞳函数和第二光瞳函数;
这里采用传统光瞳函数,p1(x,y)=δ(x,y),p2(x,y)=1,δ为冲激函数,则光学传递函数可表示为:
步骤2-2.菲涅尔波带板对3-D物体进行2-D扫描,置于物体后的光电探测器接受物体的透射光并将其转化为电信号,传到电脑端,得到全息图,物体的全息图函数可写成:
g(x,y)=F-1{F[O(x,y;z0)]·OTF(kx,ky;z0)}
其中,z0为物体所在位置,F和F-1分别表示傅里叶变换和逆傅里叶变换,O(x,y;z0)表示物体的振幅函数;
步骤3.重复步骤1和步骤2,以此获得N幅全息图;统一对N幅全息图的文件名进行处理,每一张图像名称修改为对应的全息图标签;
步骤4.利用获得的全息图以及对应的标签作为训练数据,训练一个能够识别全息图的模型;
步骤4的具体过程为:
步骤4-1.将步骤3得到的N幅全息图依次顺时针旋转90°以扩充训练图像数据,并修改每一张全息图标签,以此得到训练标签;
步骤4-2.利用旋转前后得到的2*N幅全息图及其对应的标签作为训练数据,训练卷积神经网络得到一个可以识别全息图的模型,记为函数Model;
卷积神经网络模型如图4所示,结构依次如下:
Input:输入层,即全息图;Layer1:卷积层1,包含32个3x3的卷积核,2x2的池化层,以及Re LU激活函数;Layer2:卷积层2,包含64个3x3的卷积核,2x2的池化层,以及Re LU 激活函数;FCl:全连接层1,包含256个神经元;Output:输出层,包含10个神经元,即为标记的10类。
利用训练好的网络模型就能解决全息图像识别问题,如,当输入数字1的全息图时,该模型会输出数字1。
图5为本发明实施例在训练样本和验证样本下的误差值;图6为本发明实施例在训练样本和验证样本下的准确值。
一种基于卷积神经网络的光学扫描全息图像识别方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。

















动态评分
0.0