

IPC分类号 : G01R31/08I,G01R23/02I,G01R25/00I,H03H21/00I,H03L7/093I








专利摘要
本发明实施例提供一种滤波器、同步相量测量系统及方法。所述滤波器为固定窗口长度的自适应滑动平均滤波器;所述系统包括滤波器和锁相环控制环路,所述锁相环控制环路的输出端与所述滤波器的输入端进行级联;所述方法包括获取智能电网输出的电压信号;将所述电压信号输入至所述同步相量测量系统,获取所述同步相量测量系统输出的相量测量结果和频率测量结果。本发明实施例通过基于锁相环的同步相量测量算法,利用固定长度自适应滑动平均滤波器对1型锁相环输出的波纹进行滤波,并给出估计参数的时标,最后的测量结果表明基于同步相量测量系统的方法能够在电网畸变的情况下准确地跟踪电网频率和相量,其结果的响应时间和测量精度能满足IEEEC37.118的要求。
权利要求
1.一种滤波器,其特征在于,所述滤波器为固定窗口长度的自适应滑动平均滤波器,所述固定窗口长度的取值是基于采样点个数和采样频率得到的;
所述固定窗口长度的自适应滑动平均滤波器定义为:
其中,N
上述定义公式等价于脉冲响应为h
其中,r值设定为:
则得到:
|H
使得FAMAF可以凭借固定的数据窗口长度T
2.一种同步相量测量系统,其特征在于,包括如权利要求1所述的滤波器,还包括锁相环控制环路,所述锁相环控制环路的输出端与所述滤波器的输入端进行级联。
3.根据权利要求2所述的一种同步相量测量系统,其特征在于,所述锁相环控制环路,包括由若干个非自适应滑动平均滤波器串联组成的滤波器组合,与所述滤波器组合的输入端级联的第一派克变换系统,与滤波器组合的输出端级联的第二派克变换系统,以及所述第二派克变换系统的输出端级联的1型锁相环;
其中,所述滤波器组合用于前置滤波。
4.根据权利要求2所述的一种同步相量测量系统,其特征在于,所述锁相环控制环路的输出端包括相角分量输出端、幅值分量输出端和频率分量输出端;
其中,所述相角分量输出端与两个串联的所述滤波器级联;
所述幅值分量输出端和所述频率分量输出端分别与一个所述滤波器级联。
5.一种基于如权利要求2至4中任一项所述的同步相量测量系统的智能电网同步相量测量方法,其特征在于,包括:
获取智能电网输出的电压信号;
将所述电压信号输入至所述同步相量测量系统,获取所述同步相量测量系统输出的相量测量结果和频率测量结果。
6.根据权利要求5所述的一种智能电网同步相量测量方法,其特征在于,所述智能电网为三相系统或单相系统。
7.根据权利要求5所述的一种智能电网同步相量测量方法,其特征在于,所述将所述电压信号输入至所述同步相量测量系统,获取所述同步相量测量系统输出的相量测量结果和频率测量结果,还包括:
设置所述相量测量结果和所述频率测量结果的时标;
所述时标通过所述相量测量结果和所述频率测量结果的测量延迟来获取。
8.根据权利要求7所述的一种智能电网同步相量测量方法,其特征在于,所述测量延迟是基于相角、幅值、频率和频率变化率得到的测量延迟。
9.根据权利要求5至8中任一所述的一种智能电网同步相量测量方法,其特征在于,该方法还包括:
对所述同步相量测量系统中的第二派克变换系统的旋转角在预设时间之后进行重置。
10.根据权利要求5所述的一种智能电网同步相量测量方法,其特征在于,所述方法还包括:分别对所述相量测量结果和所述频率测量结果的响应时间和测量精度进行性能评估。
说明书
技术领域
本发明涉及智能电网技术领域,尤其涉及一种滤波器、同步相量测量系统及方法。
背景技术
同步相量测量装置(Phasor Measurement Unit,以下简称PMU)在广域、实时地监测电网动态方面发挥着重大作用。其中,同步相量测量算法是PMU的核心。因此,精确、快速的同步相量测量算法是PMU能否在智能电网全系统监控和可靠运行中广泛应用的关键。
现有技术中的同步相量测量算法主要分为两大类:基于离散傅里叶变换(Discrete Fourier Transform,以下简称DFT)DFT的同步相量测量算法与基于非DFT的同步相量测量算法。
目前,基于DFT的同步相量测量算法在商业应用的PMU中较为常见,同时,它们也是相关IEEE标准中的参考方法。当电网频率接近其标称值时,传统的基于DFT的算法可以实现准确测量,但在存在频率偏差的情况下,由于DFT的频谱泄漏问题,基于DFT的算法会产生较大的信号误差。虽然近年来提出了一些在非标称频率条件下提高基于DFT算法精度的方法,然而这些工作增加了实施的复杂性,并可能降低动态响应。
而基于非DFT的同步相量测量算法主要有:水平交叉法,卡尔曼滤波法,牛顿法,自适应神经网络,最小二乘法,小波法,泰勒法,子空间算法等。然而,这些方法通常存在一些缺点,限制了它们在同步相量测量中的应用。例如,所提出的方法通常具有有限的抗干扰能力,在电网频率偏离标称频率的谐波条件下,其测量精度可能难以令人满意。此外,所提出的方法通常在动态响应和稳态精度之间进行权衡,提高测量精度通常是以牺牲动态性能为代价的。
由于基于DFT的测量算法存在动态响应时间不理想,而基于非DFT的测量算法又存在测量精度不高的问题,均是由于上述两种测量算法中使用的滤波器性能不佳,无法实现在动态响应和稳态精度之间进行有效的性能均衡。
因此,需要提出一种精度较高、动态响应快的滤波器。
发明内容
本发明实施例提供一种滤波器、同步相量测量系统及方法,用以解决现有技术中基于同步相量测量的对智能电网状态监控时,受电网畸变使得频率偏差较大的影响,导致测量结果精确度较低,响应时间较慢的问题。
第一方面,本发明实施例提供一种滤波器,包括:
所述滤波器为固定窗口长度的自适应滑动平均滤波器,所述固定窗口长度的取值是基于采样点个数和采样频率得到的。
第二方面,本发明实施例提供一种同步相量测量系统,包括:
滤波器,还包括锁相环控制环路,所述锁相环控制环路的输出端与所述滤波器的输入端进行级联。
优选的,所述锁相环控制环路,包括由若干个非自适应滑动平均滤波器串联组成的滤波器组合,与所述滤波器组合的输入端级联的第一派克变换系统,与滤波器组合的输出端级联的第二派克变换系统,以及所述第二派克变换系统的输出端级联的1型锁相环;
其中,所述滤波器组合用于前置滤波。
优选的,所述锁相环控制环路的输出端包括相角分量输出端、幅值分量输出端和频率分量输出端;
其中,所述相角分量输出端与两个串联的所述滤波器级联;
所述幅值分量输出端和所述频率分量输出端分别与一个所述滤波器级联。
第三方面,本发明实施例提供一种智能电网同步相量测量方法,包括:
获取智能电网输出的电压信号;
将所述电压信号输入至所述同步相量测量系统,获取所述同步相量测量系统输出的相量测量结果和频率测量结果。
优选的,其特征在于,所述智能电网为三相系统或单相系统。
优选的,所述将所述电压信号输入至所述同步相量测量系统,获取所述同步相量测量系统输出的相量测量结果和频率测量结果,还包括:
设置所述相量测量结果和所述频率测量结果的时标;
所述时标通过所述相量测量结果和所述频率测量结果的测量延迟来获取。
优选的,所述测量延迟是基于相角、幅值、频率和频率变化率得到的测量延迟。
优选的,该方法还包括:
对所述同步相量测量系统中的第二派克变换系统的旋转角在预设时间之后进行重置。
优选的,所述方法还包括:分别对所述相量测量结果和所述频率测量结果的响应时间和测量精度进行性能评估。
本发明实施例提供的一种滤波器、同步相量测量系统及方法,通过基于锁相环的同步相量测量算法,利用固定长度自适应滑动平均滤波器对1型锁相环输出的波纹进行滤波,并给出了估计参数的时标,最后结果验证了能够在电网畸变的情况下准确地跟踪电网频率和相量,其响应时间和测量精度能满足IEEE C37.118的要求。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本发明实施例提供的各种滤波器的频率响应对比图;
图2为本发明实施例提供的各种滤波器的滤波结果对比图;
图3为本发明实施例提供的一种同步相量测量系统结构图;
图4为本发明实施例提供的锁相环控制环路的内部结构图;
图5为本发明实施例提供的多个非自适应滑动平均滤波器级联结构图;
图6为本发明实施例提供的一种智能电网同步相量测量方法流程图;
图7为本发明实施例提供的幅值、相角、频率阶跃变化下的向量估计总误差对比图;
图8为本发明实施例提供的幅值、相角、频率阶跃变化下的频率误差对比图;
图9为本发明实施例提供的幅值、相角、频率阶跃变化下的频率变化率误差对比图。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
针对现有技术存在的问题,本发明实施例提出了一种基于锁相环的同步相量测量方法,该方法基于同步相量测量系统,系统包括锁相环和固定窗口长度的自适应滑动平均滤波器(A Fixed length Adaptive Moving Average Filter,以下简称FAMAF)。
本发明实施例提供一种滤波器,包括:
所述滤波器为固定窗口长度的自适应滑动平均滤波器,所述固定窗口长度的取值是基于采样点个数和采样频率得到的。
具体地,本发明实施例中的FAMAF是基于滑动平均滤波器(MAF)得到,MAF凭借其简单有效、易于实施的特点而受到了广泛的应用。MAF的进程可以表示为:
其中,Nw=Tw/Ts,Tw是MAF的窗口长度,Ts=1/fs,fs是采样频率,hMAF(m)为MAF的冲激响应函数,hMAF(m)=[1,1,...,1],m=0,1,...,Nw-1。公式(1)等价于脉冲响应为hMAF(m)的有限脉冲响应(FIR)滤波过程。MAF的频率响应可以描述为:
其中fw=1/Tw。可以证明HMAF(kfw)=0,它意味着MAF可以滤除在fw的整数倍处的扰动。
如果公式(1)、(2)中的Tw不随着输入信号调整,则这种MAF是非自适应MAF(NMAF)。NMAF具有固定的滤波能力,滤波能力对电网频率变化敏感。例如,将NMAF的窗口长度设为电网标称周期,可以较好地滤除谐波;然而,当频率偏移时,NMAF的滤波能力下降。
反之,如果Tw能够随着输入信号调整,则这种MAF是自适应MAF(AMAF)。AMAF具有可变的频率特性,根据这一点可以滤除在频率偏移下的干扰。然而,AMAF的窗口长度是可变的,这使得同步相量测量中估计参数的时标难以准确设置。为了解决这一问题,提出了一种固定长度的AMAF(FAMAF),它具有固定数据窗口长度的可调滤波能力。
FAMAF定义为:
其中,Nw=Tw/Ts,Tw是FAMAF的窗口长度,r为使FAMAF频率自适应的系数。公式(3)等价于脉冲响应为hFAMAF(m)=[1-r,1,......,1-r]的FIR滤波过程,其中,m=0,1,...,Nw-1。hFAMAF(m)的传递函数和频率响应可以描述为:
可以证明,如果公式(5)中的r值设定为:
则可以得到:
|HFAMAF[k(fw+Δfw)]|≈0 (7)
公式(7)表示FAMAF可以凭借固定的数据窗口长度Tw=1/fw滤除fw+Δfw的整数倍的干扰分量,FAMAF的频率相应可以根据对r值的调整来设定。
本发明实施例通过具体的例子来说明提出的FAMAF的有效性,测试信号为x(t)=1+sin(2π65t),振荡分量的频率为65Hz,采样频率设为1.44kHz。为了对振荡分量进行滤波,采用了三种滤波器。滤波器包括NMAF、公式(3)中所示的FAMAF以及基于线性插值的AMAF(LIP-AMAF)。NMAF和FAMAF的数据窗口长度固定在一个标称周期内,即16.7ms。根据网格频率调整LIP-AMAF的数据窗口长度为16.0ms。FAMAF的r值为0.9223,参照公式(6),LIP-AMAF的a值为0.1538,参照参考文献“L.Wang,Q.Jiang,L.Long,C.Zhang,and Y.Wei,“A NovelPhase-locked Loop Based on Frequency Detector and Initial Phase AngleDetector,”IEEE Trans.Power Electron.,vol.28,pp.4538-4549,Oct.2013.”中,其中a为使LIP-AMAF频率自适应的系数。
图1为本发明实施例提供的各种滤波器的频率响应对比图,如图1所示,虚线、实线和点划线分别表示NMAF、LIP-AMAF和FAMAF的频率响应,其中三个滤波器的频率响应如图1中的(a)所示,图1(a)的局部放大如图1中的(b)所示。图2为本发明实施例提供的各种滤波器的滤波结果对比图,如图2所示,虚线、实线和点划线分别是NMAF、LIP-AMAF和FAMAF的滤波结果,如图2中的(a)所示,其中LIP-AMAF与FAMAF的详细比较如图2中的(b)所示。由图1(a)可知,三种滤波器具有相似的幅值响应。从图1(b)可以看出,所提出的FAMAF对65Hz时的振荡分量衰减幅度最大。这意味着FAMAF对这一振荡分量具有最佳的滤波能力。如图2所示的滤波结果验证了这一点。在图2(a)中,LIP-AMAF和FAMAF的波形几乎重合。这意味着它们对干扰都具有良好的滤波能力,图2(b)给出了两种滤波器的详细比较。从图2(b)可以看出,FAMAF比LIP-AMAF具有更强的滤波能力。此外,与LIP-AMAF相比,FAMAF具有固定的数据窗口长度,因此具有固定的响应延迟。
本发明实施例通过在滑动平均滤波器基础上进行改进,具有固定长度窗口的可调滤波能力,有效地克服了NMAF受频率偏移影响时抗干扰能力弱,以及AMAF的窗口长度可变,使得估计参数的时标难以准确设置的缺陷。
因此,在同步相量测量应用中,能有效地为估计参数设置时标。
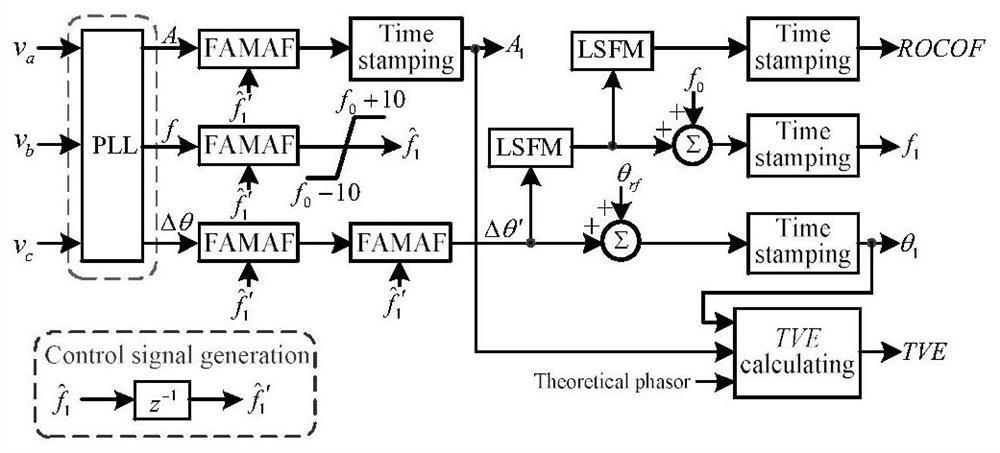
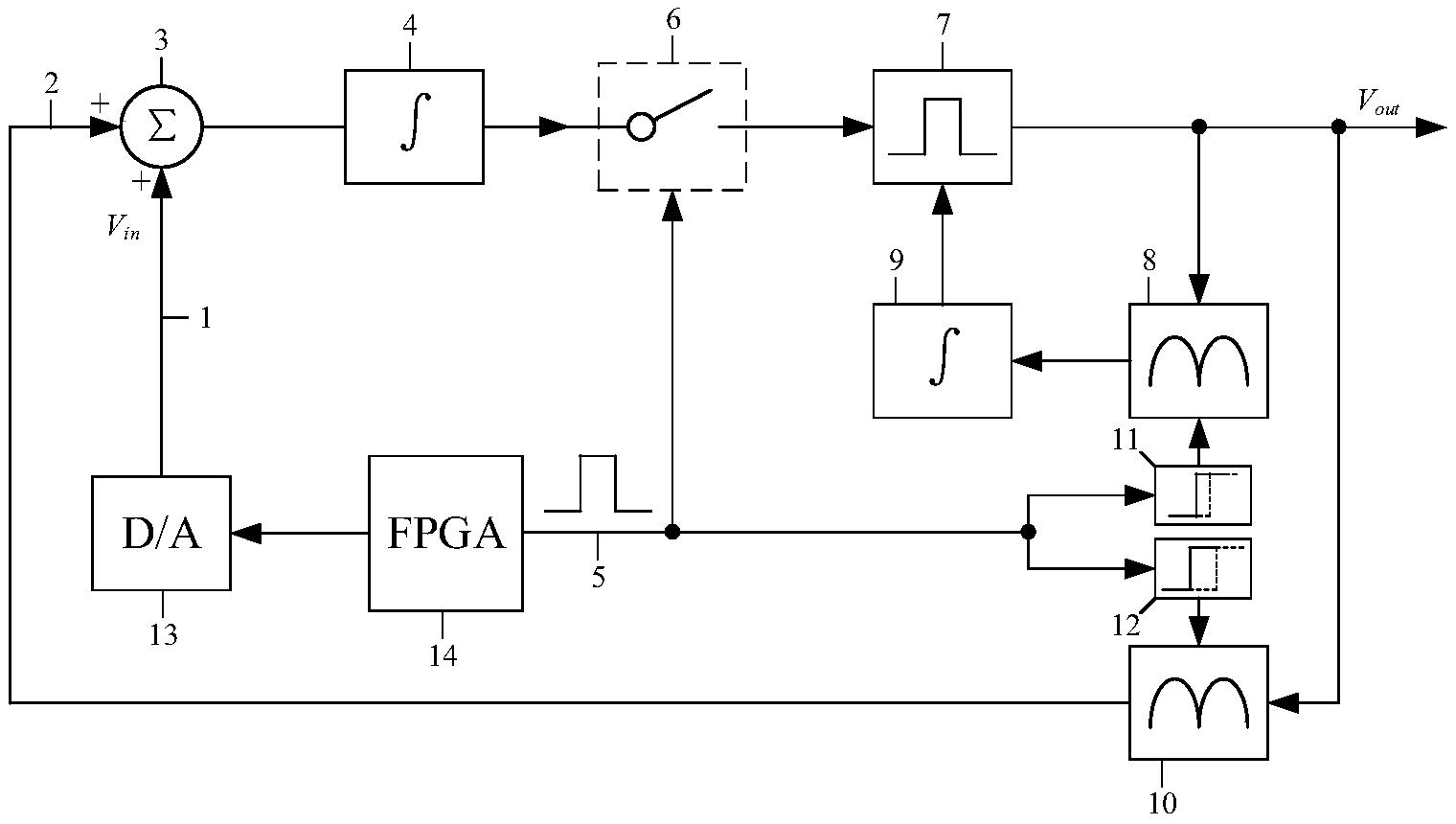
在上述实施例的基础上,图3为本发明实施例提供的一种同步相量测量系统结构图,如图3所示,包括:
滤波器,还包括锁相环控制环路,所述锁相环控制环路的输出端与所述滤波器的输入端进行级联。
具体地,同步相量测量系统的构成从输入端开始为锁相环控制环路,该控制环路由锁相环及其输入端前置的若干部件构成,而锁相环控制环路的输出端与上述实施例中获得的滤波器进行级联,构成系统的整体。
本发明实施例通过在锁相环控制环路后级联FAMAF,增强了系统在频率偏移下的抗干扰能力。
在上述实施例的基础上,图4为本发明实施例提供的锁相环控制环路的内部结构图,如图4所示,所述锁相环控制环路,包括由若干个非自适应滑动平均滤波器串联组成的滤波器组合,与所述滤波器组合的输入端级联的第一派克变换系统,与滤波器组合的输出端级联的第二派克变换系统,以及所述第二派克变换系统的输出端级联的1型锁相环;
其中,所述滤波器组合用于前置滤波。
具体地,图4中结构的主体是一个1型锁相环(PLL),它是最简单的一种PLL,在它的控制环路中只有一个积分器,因此具有很高的稳定裕度与快速的动态响应。然而,1型PLL的抗干扰能力是有限的。为了解决这一问题,图4的结构中设计了前置预滤波环节,在PLL的控制环路前增加了滤波器。
在图4的PLL控制环路之前,有两级Park变换的级联,两级Park变换的旋转频率不同,对应的旋转角度也是不同的,即旋转频率和旋转角度均能够用来描述Park变换旋转坐标系的特性。第一个Park变换的旋转频率(角度)为电网标称频率f0(角度θrf=∫2πf0dt),第一个Park变换等价于输入电压矢量以频率(角度)f0(θrf)反向旋转,这样,第一次Park变换之后,基波正序分量(FFPS)以频率(相角)Δf=f1-f0(Δθ=θ1-θrf)被转化为准直流项。由于锁相环控制回路的影响,第二个Park变换的旋转频率(角度)近似于Δf(Δθ)。
在上述实施例的基础上,采用多个NMAF级联作为PLL的前置滤波环节,图5为本发明实施例提供的多个非自适应滑动平均滤波器级联结构图,如图5所示,采用4个NMAF的级联结构,将每个NMAF进行串联,构成滤波器组合。
在本发明实施例中,NMAF的窗口长度设定为T0/2,其中T0是电网标称周期。
NMAF在PLL中的应用如图4所示,在频率偏移下,NMAF造成了幅值衰减。多个NMAF级联结构应用于第一个Park变换之后,以Δf=f1-f0将FFPS转化为准直流项。因此,由NMAF引起的幅值衰减可以从公式(2)得到:
其中,N0是一个标称周期的采样点数。由于该环节由四个NMAF级联而成,因而幅值衰减为(KNMAF)
图4所示的NMAF级联结构可以在第一个Park变换后阻断偶次谐波。注意,第一个Park的变换等价于电压信号以f0的频率反向旋转,因此,第一个Park变换后的偶次谐波对应于电信号中的基波负序分量(FFNS)和奇次谐波。然而,在存在频率偏移的情况下,NMAF级联结构的滤波能力可能会下降。此外,NMAF级联结构不能阻挡电信号中的偶次谐波。NMAF级联结构滤波性能不理想,导致锁相环输出产生波动。
为了进一步过滤PLL输出中的波纹,图3中设置了基于FAMAF的后值滤波环节。为了实现更精确的相角测量,在PLL输出的相角后级联了一对FAMAF。整个后置滤波环节中一共使用了四个FAMAF。本发明实施例中,FAMAF的窗口长度设置为Tw=(N0+1)/fs。在固定的数据窗口长度下,FAMAF可以有效地滤除频率偏移下PLL输出中的干扰分量。
下面将给出FAMAF中r值的计算过程。首先,PLL输出的频率经过一个FAMAF,得到一个初步的频率估计 的值被用于FAMAF的频率自适应过程,如图3所示。FAMAF中r的值由公式(6)得到,其中 fw=fs/(N0+1)。
对 进行估计的响应时间很快,然而,在动态环境下,它的测量精度会有所降低。为了解决这一问题,图3给出了对频率的更精确估计f1。f1采用最小二乘拟合法(LSFM)计算。
其中,Δθ'(k)为估计的相角误差,如图3所示。 是两个相角间的步长,Lf是LSFM方法中使用的相角个数。Fm是常系数,可以计算出来。假设Fs=1.44kHz。 Lf=9,则可以获得F1=-16,F2=-12,F3=-8,F4=-4,F5=0,F6=4,F7=8,F8=12,F9=16。
频率变化率(ROCOF)也可以用LSFM计算得到:
其中,f1(k)是公式(9)中的估计频率, 是两个频率之间的步长,Lrf是LSFM中使用的频率个数。
Lf,Lrf的值越大,表示用于估计频率与ROCOF的数据窗口长度越长,对应于更高的测量精度与更慢的动态响应,反之亦然。
在图3所示的结构中,FAMAF应用于PLL控制环路之后,这样,针对FAMAF的频率反馈支路不会影响到PLL的稳定裕度。因此,可以为PLL的控制回路设置宽带宽,以实现快速的动态响应。本发明实施例中的kp设置为0.5fs。
图6为本发明实施例提供的一种智能电网同步相量测量方法流程图,如图6所示,包括:
S1,获取智能电网输出的电压信号;
S2,将所述电压信号输入至所述同步相量测量系统,获取所述同步相量测量系统输出的相量测量结果和频率测量结果。
具体地,本发明实施例提出的智能电网同步相量测量方法,是一种基于PLL的同步相量测量算法(a Phase-locked loop based Synchrophasor Measurement Algorithm,以下简称PSMA)将待估计测量的智能电网输出的电压信号,输入至锁相环控制环路,锁相环控制环路的输出端和FAMAF级联,由FAMAF的输出端输出相量测量结果和频率测量结果。
本发明实施例通过提出的PSMA算法,基于FAMAF具有可调的过滤能力,具有固定的数据窗口长度,在锁相环控制环路后采用FAMAF增强了在频率偏移下的抗干扰能力,有效地对输入的电压信号的相量测量结果和频率测量结果进行了测量估计。
在上述实施例的基础上,所述智能电网为三相系统或单相系统。
具体地,PSMA方法是为三相系统设计的,多个NMAF级联的预滤波环节使之对FFNS分量具有很高的抗干扰能力。此外,PSMA同样可以适用于单相系统,可以将单相系统等价于一个不平衡的、具有很高的FFNS分量的三相系统,只要将三个输入按照三相系统中的三个分量va、vb和vc,如图3所示,按照va(t)=2v(t),vb(t)=vc(t)=0进行设置,就能够实现PSMA在单相系统中的应用。
在上述实施例的基础上,所述将所述电压信号输入至所述同步相量测量系统,获取所述同步相量测量系统输出的相量测量结果和频率测量结果,还包括:
设置所述相量测量结果和所述频率测量结果的时标;
所述时标通过所述相量测量结果和所述频率测量结果的测量延迟来获取。
所述测量延迟是基于相角、幅值、频率和频率变化率得到的测量延迟。
具体地,PSMA方法是一种递归方法,而同步相量测量技术要求在同一时间标签下分析并计算出该时刻下的频率、相角等同步相量,因此同步相量测量不仅要给出所测量的数据,还要给出数据所对应的时标,以明确该数据是某一时刻所测量的数据。而NMAF、FAMAF、PLL控制回路和LSFM都会产生时间延迟,因此在某一时刻t测量获得的数据并不是真正t时刻下的数据,而是t减去测量延迟时间这一时刻的数据。t减去测量延迟时间用于设置t时刻所测量数据的时标,能够避免测量延迟带来的时间误差,使得测量结果更准确。
为了准确地设置估计参数的时标,需要知道估计参数的测量延迟。估计参数的测量延迟主要由NMAF、FAMAF、PLL控制回路和LSFM的实现引起。下面分析相角、幅值、频率和ROCOF的估计产生的测量延迟。
相角测量的测量延迟主要由NMAF、FAMAF以及PLL的控制回路引起。一个NMAF或FAMAF产生的延迟都是(Nw-1)/2,相角测量中一共使用了四个NMAF和两个FAMAF,它们产生的延迟时间为(2N0-2)Ts。控制回路是一个一阶系统,时间常数为1/kp,动态响应时间与1/kp有关,如果kp的值设置为0.5fs,则控制回路引起的测量延迟为2Ts。这样,相角测量的总延迟时间为2N0Ts,t-2N0Ts用于设置t时刻相角测量的时标。
幅值测量的测量延迟由NMAF和FAMAF引起。幅值测量一共使用了四个NMAF和一个FAMAF,它们产生的时间延迟为(1.5N0-2)Ts,因而t-(1.5N0-2)Ts用于设置t时刻幅值测量的时标。
频率测量的测量延迟主要由NMAF、FAMAF、PLL控制环路以及公式(9)中的LSFM引起。频率测量中一共使用了四个NMAF和两个FAMAF。由NMAF、FAMAF以及PLL引起的延迟时间为2N0Ts,由LSFM引起的延迟为 因此,总延迟时间为 当 LF=9时,测量的总延迟时间为3N0Ts,因而t-3N0Ts用于设置t时刻频率测量的时标。
ROCOF的测量延迟主要由频率测量以及LSFM引起,总延迟时间为 当 LF=9、LRF=9时,测量的总延迟时间为3.5N0Ts,t-3.5N0Ts用于设置t时刻ROCOF测量的时标。
在上述实施例的基础上,该方法还包括:
对所述同步相量测量系统中的第二派克变换系统的旋转角在预设时间之后进行重置。
具体地,第二个Park变换的旋转角(图4中的Δθ)是一个不断增大的斜坡信号,它的值必须在特定的时间之后重置,避免数据溢出。比如,当Δθ(k)>2Mπ时(M是一个整数,可以预先设置),Δθ(k)可以被重置为Δθ(k)=Δθ(k)-2Mπ,以避免数据溢出。重置进程在Δθ(k)中产生了一个相位跳变,在FAMAF的作用下导致对图3中Δθ'(i)(i=k,L,k+N0)的错误估计。为了解决这一问题,当对Δθ(k)进行重置时,将Δθ(i)(i=k-N0,L,k-1)前N0个值重置为Δθ(i)=Δθ(i)-2Mπ,这样可以很好地避免重置过程导致的错误相位估计。
在上述实施例的基础上,所述方法还包括:分别对所述相量测量结果和所述频率测量结果的响应时间和测量精度进行性能评估。
具体地,将智能电网的电压信号输入至同步相量测量系统得到相量测量结果和频率测量结果之后,还要对所得到的上述结果进行性能评估,分别从响应时间和测量精度两个维度进行评估。
(1)响应时间
对PSMA在阶跃变化下的响应时间作出评估。阶跃变化在幅值、相角和频率上的变化可以模拟为:
x(t)=Xm[1+kxf1(t)]×cos{2π[f0+kbf1(t)]t+kaf1(t)} (11)
其中,f1(t)是一个单位阶跃函数,kx,ka,kb分别是阶跃函数中幅值、相角、频率的幅度大小,标称频率为60Hz,采样频率为1.44kHz。
kx,ka,kb的值参考设置为0.1,π/18和1。另外还考虑了中没有被指定的频率的阶跃变化,用于评估PSMA方法的性能。PSMA的参数设置为 LF=9、LRF=9。公式(12)中给出的向量估计总误差(TVE)、频率误差(FE)、ROCOF误差(RFE)分别如图7至图9所示。
其中Xr(t)和Xi(t)是t时刻输入信号理论值的实部和虚部,xr(t)和xi(t)是测量值的实部和虚部。
如表1所示,将比对的结果按照标准列出,表示TVE、FE和RFE的响应时间,IEEE标准C37.118要求的P/M类响应时间如表1所示。图7至图9和表1表明,PSMA的响应时间同时满足IEEE C37.118规定的P类和M类要求。
表1
实验结果表明,参数 Lf、Lrf对TVE的响应时间没有影响。因此,TVE的响应时间总是满足P/M的要求。然而,频率和ROCOF的响应时间受参数 Lf、Lrf的影响,这些参数值越大,响应时间越慢,频率和ROCOF测量精度越高,反之亦然。
(2)测量精度
在测量精度评估中,将所提出的PSMA方法与现有技术进行了比较。采用最大FE、最大RFE、最大幅值误差(ME)、最大相角误差(AE)和TVE对该方法的性能进行了评价。在所有的对比实验中,PSMA的参数都设置为 LF=9、LRF=9。因此,PSMA的响应时间满足IEEE标准中P/M类的要求。在50Hz(或60Hz)系统下,对不同采样频率下PSMA的性能进行了评估。
1)与准正序离散傅里叶变换(Qps-DFT)方法的比较
将PSMA算法与Qps-DFT算法进行了比较,详见参考文献“T.Xia and Y.Liu,“Single-phase Phase Angle Measurement in Electric Power Systems”,IEEETrans.Power Syst.,vol.24,no.2,pp.844-852,May 2010.”和“L.Zhan,Y.Liu,J.Culliss,J.Zhao,and Y.Liu,“Dynamic Single-Phase Synchronized Phase and FrequencyEstimation at the Distribution Level,”IEEE Trans.Smart Grid,vol.6,no.4,pp.2013-2022,July 2015.”。为了比较客观地进行比较,将标称频率设为60Hz,并给出近似TVE(aTVE)进行比较。aTVE是指在TVE计算中,假设幅值误差为零,只将角度测量误差转换为PMU标准中使用的TVE。试验条件及测量精度如表2所示。对于PSMA,实际的TVE如表2所示,它是用PSMA中估计的幅值和相角计算得到的。
表2显示,PSMA在大多数参数上都优于Qps-DFT。只有在四个参数下,PSMA的精度低于Qps-DFT。
在case 2中,PSMA在FE中的测量误差要高于Qps-DFT。主要原因是PSMA比Qps-DFT具有更快的动态特性,因此对噪声更敏感。在PSMA结构中增加额外的噪声滤波器或增加NMAF和LSFM的数据窗口长度,可以提高PSMA的测量精度。比如,当 增加到 最大FE将降低到0.5mHz。
在case 3中,PSMA在AE、FE和TVE方面的误差要高于Qps-DFT。但是PSMA的测量误差(4e-8mHz和6.9e-3%TVE)远小于PMU标准(25mHz和1%TVE)。此外,在实际应用中,电网基频可能会出现频率偏差。在非标称频率条件下,PSMA的优点是显而易见的。例如,当基频偏离到59.5/60.5Hz时,PSMA的测量精度高于Qps-DFT。
表2
备注:PMU std.:同步相量测量标准;Reference signal:参考信号;AE:相角误差;FE:频率误差,aTVE;近似总矢量误差;TVE;总矢量误差;Steady state accuracy:稳态精度;Dynamic state accuracy:动态精度;Frequency range:频率范围;Noise:噪声;Harmonic distortions:谐波失真;Frequency ramp:频率斜坡;Magnitude modulation:幅值调制;Phase modulation:相角调制。
2)与分布式级别的相量测量装置(D-PMU)方法以及插值离散傅里叶变换(IpDFT)方法的比较
将PSMA与D-PMU和IpDFT进行了比较,详见参考文献“K.Chauhan,M.V.Reddy,andR.Sodhi,“A Novel Distribution-Level Phasor Estimation Algorithm UsingEmpirical Wavelet Transform,”IEEE Trans.Ind.Electron.,vol.65,no.10,pp.7984-7995,Oct.2018.”和“P.Romano and M.Paolone,“Enhanced Interpolated-DFT forSynchrophasor Estimation in FPGAs:Theory,Implementation and Validation of aPMU Prototype”,IEEE Trans.Instrum.Meas.,vol.63,no.12,pp.2824-2836,Dec,2014.”。为了客观地进行比较,标称频率为50Hz,采样频率为6.4kHz。一共进行了五个实验,测试条件参照:
Case 1(频率范围测试):测试信号为x(t)=cos(2πft),45≤f≤55Hz。
Case 2(频率斜坡测试):测试信号为x(t)=cos(2πft+πRft
Case 3(谐波失真测试):测试信号为x(t)=cos(2πf0t)+0.1cos(2πhf0t),h是从2~50变化的谐波阶数。
Case 4(相位调制测试):测试信号为x(t)=[1+kxcos(2πfmt)]cos[2πf0t+kacos(2πfmt)],其中kx=0,ka=0.1,调制频率fm从0.1~5Hz变化。
Case 5(幅值调制测试):测试信号为x(t)=[1+kxcos(2πfmt)]cos[2πf0t+kacos(2πfmt)],其中kx=0.1,ka=0,调制频率fm从0.1~5Hz变化。
最大测量误差如表3所示。表3表明,所有方法均满足PMU标准。然而,PSMA在大多数参数上都优于D-PMU和IpDFT。
表3中,只有在case 3的谐波失真测试中,PSMA的测量精度不是最高的。然而,PSMA的测量误差远远小于PMU标准。此外,在实际应用中,电网基频可能会出现频率偏差。PSMA的优点可以在表2中case 3所述的非标称频率条件下看出。
表3
3)与DPMA、CT-DFT以及MDSEA方法的比较
PSMA方法与动态同步相量测量算法(DPMA)、基于Clarke变换的离散傅里叶变换(CT-DFT)、改进的动态同步相量测量算法(MDSEA)在功率震荡的条件下进行了对比实验,详见参考文献“R.K.Mai,Z.Y.He,L.Fu,B.Kirby,and Z.Q.Bo,“A Dynamic SynchrophasorEstimation Algorithm for Online Application,”IEEE Trans.Power Del.,vol.25,no.2,pp.570-578,Apr.2010.”,“L.Zhan,Y.Liu,and Y.Liu,“A Clarke Transformation-Based DFT Phasor and Frequency Algorithm for Wide Frequency Range,”IEEETrans.Smart Grid,vol.9,no.1,pp.67-77,Jan.2018.”和“L.Fu,J.Zhang,S.Xiong,Z.He,and R.Mai,“A Modified Dynamic Synchrophasor Estimation Algorithm ConsideringFrequency Deviation,”IEEE Trans.Smart Grid,vol.8,no.2,pp.640-650,Mar.2017.”。为了客观地进行比较,标称频率为50Hz,采样频率为2.4kHz。本节将进行两个对比实验。
测试信号为x(t)=[1+kxcos(2πfmt)]×cos[2π(f0+Δf)t+kαcos(2πfmt-π)],其中fm是调制频率,变化范围从0.1Hz到5Hz,kx是幅值调制因子,ka是相角调制因子。
Case 1(幅值震荡测试):kx=0.1,ka=0。
Case 2(相角震荡测试):kx=0,ka=0.1。
试验条件和测量精度如表1所示。表4显示,PSMA为大多数参数提供了最精确的测量。
只有在第一种情况下,当基频偏离到47.5Hz和45Hz时,PSMA在FE中没有最高的精度。但测量误差(1.4e-2Hz和7e-3Hz)远小于PMU标准(0.3Hz)。此外,在这些条件下,PSMA测量TVE和REF的准确度最高。
测量精度的比较验证了PSMA的高精度。并证明了PSMA在所有测试条件下均满足PMU的要求。
表4
本发明实施例通过将测量结果和现有技术中的多种测量算法结果进行比较,PSMA测量结果的响应时间和测量精度整体均优于现有的测量算法结果,体现了PSMA算法在能够在电网畸变的情况下准确地跟踪电网频率和相量。响应时间和测量精度满足IEEE C37.118的要求。
以上所描述的装置实施例仅仅是示意性的,其中所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部模块来实现本实施例方案的目的。本领域普通技术人员在不付出创造性的劳动的情况下,即可以理解并实施。
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
一种滤波器、同步相量测量系统及方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。









动态评分
0.0