









专利摘要
一种主轴动平衡双平面等效力平衡在线调节方法,属于高速主轴在线动平衡技术领域。在采用机械式质量块调整动平衡的情况下,主轴动平衡调整装置由同心且并列的两组质量组块组成,动平衡调整装置安装在主轴上并与主轴构成完整的主轴系统,实现主轴系统动平衡的校正也即实现主轴动平衡的调整;主轴系统旋转并产生动不平衡时,通过动平衡调整装置的两组质量组块中的质量块的移动产生平衡力及附加动不平衡力,当平衡力矢量与附加动不平衡力矢量、主轴系统的动不平衡矢量之和为零时主轴系统达到新的动平衡状态。本发明综合考虑动平衡调整过程中调整装置质量中心转移产生负向离心力的情况,从而调整质量组块中质量块的位置实现调节主轴的动不平衡状态。
权利要求
1.一种主轴动平衡双平面等效力平衡在线调节方法,其特征在于:主轴动平衡调整装置由同心且并列的两组质量组块组成,动平衡调整装置安装在主轴上并与主轴构成完整的主轴系统,实现主轴系统动平衡的校正也即实现主轴动平衡的调整;主轴系统旋转并产生动不平衡时,通过动平衡调整装置的两组质量组块的移动产生平衡力及附加动不平衡力,当平衡力矢量与附加动不平衡力矢量、主轴系统的动不平衡矢量之和为零时主轴系统达到新的动平衡状态,该过程为执行校正主轴系统的动不平衡;
所述质量组块即为动平衡调整平面,调整平面与主轴轴向垂直,所述两个质量组块即两个动平衡调整平面,分别是调整平面A和调整平面B;每一质量组块由两块质量块组成,对应调整平面A的质量组块由质量块A1和A2组成,对应调整平面B的质量组块由质量块B1和B2组成;根据动平衡调整装置设计和制造的情况,质量块A1、A2的质量分别为mA1、mA2,质量块B1、B2的质量分别为mB1、mB2,每一质量块均布置在对应的调整平面内,而且在调整平面内的质量块均可绕质量块所在质量组块的回转中心点旋转;同样由动平衡调整装置设计与制造的情况确定,质量块A1、A2的质量中心相距其所在质量组块的回转中心点距离为RA1、RA2,质量块B1、B2的质量中心相距其所在质量组块的回转中心点距离为RB1、RB2;两质量组块并列布置在主轴轴向回转中心上,调整平面A所对应的质量组块置于主轴A点位置,调整平面B所对应的质量组块置于主轴B点位置,A点、B点分别是调整平面A和调整平面B对应的质量组块的回转中心,A点、B点都置于主轴回转中心上,即两质量组块的回转中心均与主轴回转中心重合;两质量组块协同工作,即两个调整平面协同实现主轴系统动平衡的调整;
具体包括以下步骤:
步骤一主轴系统低速转动,标定两组质量组块在主轴轴向方向位置lA、lB;调整方法:分别调整调整平面A或调整平面B所对应质量组块中的质量块,通过测量计算由于调整质量块所发生动不平衡所施加不平衡离心力的位置,移动质量块A1、A2而质量块B1、B2不动,所产生不平衡离心力的位置即为调整平面A的位置点A点,移动质量块B1、B2而质量块A1、A2不动,所产生不平衡离心力的位置即为调整平面B的位置点B点,计算可知A点和B点距近端轴套固定端的坐标原点距离lA、lB;
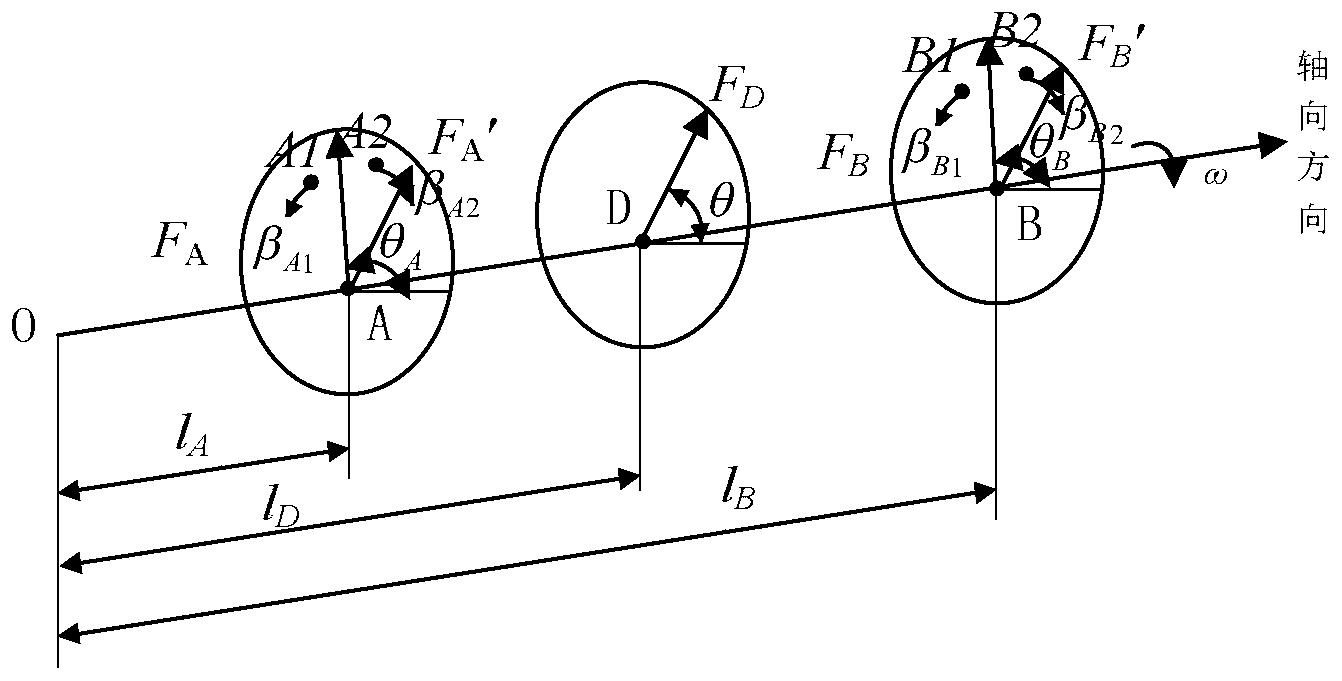
步骤二主轴系统工作转速为ω的情况下,监测主轴的动平衡状态;当主轴系统产生动不平衡时,获得动不平衡的矢量数据并合成所有相关的矢量数据,将主轴系统产生的所有不平衡合成为一个动不平衡矢量,该动不平衡矢量可以等效为由已知离心力FD作用产生的,离心力FD作用在主轴回转中心D点的位置,其与坐标原点的距离为lD,离心力FD的矢量方向为θ;
步骤三双平面受力等效分解,即将离心力FD等效分解到调整平面A和调整平面B位置所受等效力FA'、FB';
步骤四计算调整平面A和调整平面B当质量块移除时所产生的负向离心力f′A、f′B与负向离心力矢量角θ′A、θ′B;
步骤五校验每个调整平面的动平衡调整能力;如果调整平面A或调整平面B中任一调整平面的动平衡调整无法实现,则提示动平衡调整能力不足,转到执行步骤九;
步骤六计算调整平面A和调整平面B中质量组块调整所需产生的平衡力FA、FB及矢量方向θA、θB;
步骤七计算质量块A1、A2、B1、B2所需调整的角度βA1、βA2、βB1、βB2;
步骤八调整质量块的角度,完成主轴系统的动平衡调整;
步骤九准备下一次的动平调整,返回步骤二。
2.根据权利要求1所述的主轴动平衡双平面等效力平衡在线调节方法,其特征在于:双平面受力等效分解:即将与坐标原点距离为lD的D点位置的离心力FD等效分解为作用在与坐标原点距离分别为lA、lB的A点和B点位置的等效力FA'、FB',其大小由方程组
等效力FA'、FB'的矢量方向角大小均与FD相等,为θ。
3.根据权利要求1所述的主轴动平衡双平面等效力平衡在线调节方法,其特征在于:计算当质量块移除时所产生的负向离心力矢量:质量块调整前的工作状态下,对应轴向位置lA的质量组块中质量块A1和A2的质量中心与指定的标准位置之间按逆时针方向所形成的夹角为γA1、γA2,对应轴向位置lB的质量组块中质量块B1、B2的质量中心与指定的标准位置之间按逆时针方向所形成的夹角为γB1、γB2;根据主轴工作转速ω,调整前,对应轴向位置lA的质量组块中质量块A1、A2所产生的离心力为f′A1、f′A2,对应轴向位置lB的质量组块中质量块B1、B2所产生的离心力为f′B1、f′B2,由方程组
当质量组块中质量块离开调整前的位置时,由于原离心力消失所造成的负向离心力增加,对应轴向位置lA的质量组块调整所造成的负向离心力f′A,对应轴向位置lB的质量组块调整所造成的负向离心力f′B,f′A、f′B与指定的标准位置之间按逆时针方向所形成的负向离心力矢量角θ′A、θ′B,由方程组
得到负向离心力f′A、f′B与负向离心力矢量角θ′A、θ′B,其中负向离心力矢量角360°≥θ′A、θ′B≥0°且与f′A1和f′A2之间的夹角、f′B1和f′B2之间的夹角相背。
4.根据权利要求3所述的主轴动平衡双平面等效力平衡在线调节方法,其特征在于:校验每个调整平面的动平衡调整能力:调整平面A内由负向离心力f′A和离心力FD的等效力FA'合成力大小为F1,调整平面B内由负向离心力f′B和离心力FD的等效力FB'合成力大小为F2,由方程组
当动平衡调整装置的调整能力满足要求时,则满足方程组
否则则说明动平衡调整装置无法实现该时刻主轴系统动不平衡状态的调整。
5.根据权利要求1所述的主轴动平衡双平面等效力平衡在线调节方法,其特征在于:根据等效力及调整质量块所产生的负向离心力,计算动平衡质量组块所需产生的平衡力FA、FB及矢量方向θA、θB,由方程组
其中平衡力FA、FB的矢量方向角大小360°≥θA、θB≥0°且与f′A和FA'所夹角度、f′B与FB'所夹角度相背。
6.根据权利要求3所述的主轴动平衡双平面等效力平衡在线调节方法,其特征在于:为实现主轴系统的动平衡,对应轴向位置lA的质量组块中质量块A1和质量块A2需调整并产生离心力为fA1、fA2,fA1=|f′A1|、fA2=|f′A2|,fA1、fA2的矢量方向与指定的标准位置之间按逆时针方向所形成的夹角为αA1、αA2,对应轴向位置lB的质量组块中质量块B1和质量块B2需调整并产生离心力为fB1、fB2,fB1=|f′B1|、fB2=|f′B2|,fB1、fB2的矢量方向与指定的标准位置之间按逆时针方向所形成的夹角为αB1、αB2;由方程组
将两组质量组块中质量块所需产生的离心力fA1、fA2、fB1、fB2的矢量方向角αA1、αA2、αB1、αB2与相应质量块调整前的矢量方向角γA1、γA2、γB1、γB2之间的夹角βA1、βA2、βB1、βB2定义为质量块的调整值,由方程组
其中夹角βA1、βA2、βB1、βB2的正负表明动平衡调整所需相应质量块调整旋转的方向,其中正值表示相应质量块需逆时针方向旋转相应角度,负值表示相应质量块需顺时针方向旋转相应角度;当计算结果为多组可行解时,根据工程需要,选择质量块调整角度综合最小的一组解。
说明书
技术领域
本发明属于高速主轴在线动平衡技术领域,特别是涉及一种主轴动平衡双平面等效力平衡在线调节方法。
背景技术
高速数控机床主轴上实现动平衡已成为一项不可或缺的关键技术,它是以提高主轴的回转精度、可靠性及使用寿命为奋斗的终极目标。因此,寻找有效的主轴动平衡调节方法是高速数控机床主轴动平衡系统考虑的重要问题。针对在线动平衡调节技术一直是行业内的难点。在采用机械式质量块调整动平衡的情况下,主轴在线动平衡调整需要将动平衡调整装置安装在主轴上并与主轴一同形成完整的主轴系统,主轴系统整体的动平衡成为主轴动平衡考虑的对象。当主轴系统产生动不平衡并需动平衡调整装置进行调整时,动平衡调整装置中质量块的移动一方面达到平衡原有主轴系统动不平衡的目的,另一方面由于质量块的移动使原有主轴系统的质量特性发生了改变,已获得的动平衡调整装置质量块转移的位置无法达到最终平衡主轴系统整体动平衡的目的。因此,当计算动平衡装置中调整质量块位置时需要考虑调整质量块原有位置的影响,也是高速数控机床进一步改进的要求。首先,随着加工精度需求的提高,主轴系统回转精度的要求也一再的提高,主轴动平衡调整计算则需要更为精确,尽量剔出原理误差的存在。因此,主轴系统动平衡调整时忽略原有调整质量块转移附加的主轴动不平衡状态影响主轴回转精度无法进一步提高的障碍。再者,在线动平衡调整需要在瞬间完成,任何计算量的大幅度提高或是动平衡调整次数的增加都会影响主轴系统的使用性能,因此需要主轴动平衡调整方法计算精度高,算法简单、便捷。同时,当主轴系统由于各种原因产生动不平衡时,动平衡装置中的调整质量块位置与动不平衡方向的关系是随机的,两者之间不同矢量关系之间所能实现的主轴动不平衡调整能力将会不同,如何判断动平衡装置在特定时刻的调整能力具有相当的难度。判断动平衡装置的调整能力是至关重要的,这是判断动不平衡调整的可行性及避免动平衡计算由于无解而陷入软件程序的死循环。目前,国内外还未发现一种考虑动平衡装置中调整质量块移动所引起主轴系统附加动不平衡的主轴动平衡在线调整方法。
发明内容
针对上述存在的技术问题,本发明提供一种主轴动平衡双平面等效力平衡在线调节方法。
本发明的技术方案如下:
一种主轴动平衡双平面等效力平衡在线调节方法,由同心且并列的两组质量组块组成的主轴动平衡调整装置,动平衡调整装置安装在主轴上并与主轴构成完整的主轴系统,实现主轴系统动平衡的校正也即实现主轴动平衡的调整;主轴系统旋转并产生动不平衡时,通过动平衡调整装置的两组质量组块的移动产生平衡力及附加动不平衡力,当平衡力矢量与附加动不平衡力矢量、主轴系统的动不平衡矢量之和为零时主轴系统达到新的动平衡状态,该过程为执行校正主轴系统的动不平衡。
所述的主轴动平衡双平面等效力平衡在线调节方法,其中所述质量组块即为动平衡调整平面,调整平面与主轴轴向垂直,所述两个质量组块即两个动平衡调整平面,分别是调整平面A和调整平面B;每一质量组块由两块质量块组成,对应调整平面A的质量组块由质量块A1和A2组成,对应调整平面B的质量组块由质量块B1和B2组成;根据动平衡调整装置设计和制造的情况,质量块A1、A2的质量分别为mA1、mA2,质量块B1、B2的质量分别为mB1、mB2,每一质量块均布置在对应的调整平面内,而且在调整平面内的质量块均可绕质量块所在质量组块的回转中心点旋转;同样由动平衡调整装置设计与制造的情况确定,质量块A1、A2的质量中心相距其所在质量组块的回转中心点距离为RA1、RA2,质量块B1、B2的质量中心相距其所在质量组块的回转中心点距离为RB1、RB2;两质量组块并列布置在主轴轴向回转中心上,调整平面A所对应的质量组块置于主轴A点位置,调整平面B所对应的质量组块置于主轴B点位置,A点、B点分别是调整平面A和调整平面B对应的质量组块的回转中心,A点、B点都置于主轴回转中心上,即两质量组块的回转中心均与主轴回转中心重合;两质量组块协同工作,即两个调整平面协同实现主轴系统动平衡的调整。
所述的主轴动平衡双平面等效力平衡在线调节方法,具体包括以下步骤:
步骤一主轴系统低速转动,标定两组质量组块在主轴轴向方向位置lA、lB;调整方法:分别调整调整面A或调整面B所对应质量组块中的质量块,通过测量计算由于调整质量块所发生动不平衡所施加不平衡离心力的位置,移动质量块A1、A2而质量块B1、B2不动,所产生不平衡离心力的位置即为调整面A的位置点A点,移动质量块B1、B2而质量块A1、A2不动,所产生不平衡离心力的位置即为调整面B的位置点B点,计算可知A点和B点距近端轴套固定端的坐标原点距离lA、lB;
步骤二主轴系统工作转速ω下,监测主轴的动平衡状态;当主轴系统产生动不平衡时,获得动不平衡的矢量数据并合成所有相关的矢量数据,将主轴系统产生的所有不平衡合成为一个动不平衡矢量,该动不平衡矢量可以等效为由已知离心力FD作用产生的,离心力FD作用在主轴回转中心D点的位置,其与坐标原点的距离为lD,离心力FD的矢量方向为θ;
步骤三双平面受力等效分解,即将离心力FD等效分解到调整平面A和调整平面B位置所受等效力FA'、FB';
步骤四计算调整平面A和调整平面B当质量块移除时所产生的缺失离心力f'A、f'B与缺失离心力矢量角θ'A、θ'B;
步骤五校验每个调整平面的动平衡调整能力;如果调整平面A或调整平面B中任一调整平面的动平衡调整无法实现,则提示动平衡调整能力不足,转到执行步骤九:
步骤六计算调整平面A和调整平面B中质量组块调整所需产生的平衡力FA、FB及矢量方向θA、θB;
步骤七计算质量块A1、A2、B1、B2所需调整的角度βA1、βA2、βB1、βB2;
步骤八调整质量块的角度,完成主轴系统的动平衡调整;
步骤九准备下一次的动平调整,返回步骤二。
进一步地,所述的主轴动平衡双平面等效力平衡在线调节方法,双平面受力等效分解:即将与坐标原点距离为lD的D点位置的等效动不平衡作用力FD等效分解为作用在与坐标原点距离分别为lA、lB的A点和B点位置的等效力FA'、FB',其大小由方程组
等效力FA'、FB'的矢量方向角大小均与FD相等,为θ;
进一步地,所述的主轴动平衡双平面等效力平衡在线调节方法,计算当质量块移除时所产生的缺失离心力矢量:质量块调整前的工作状态下,对应轴向位置lA的质量组块中质量块A1和A2的质量中心与指定的标准位置之间按逆时针方向所形成的夹角为γA1、γA2,对应轴向位置lB的质量组块中质量块B1、B2的质量中心与指定的标准位置之间按逆时针方向所形成的夹角为γB1、γB2;根据主轴工作转速ω,调整前,对应轴向位置lA的质量组块中质量块A1、A2所产生的离心力为f'A1、f'A2,对应轴向位置lB的质量组块中质量块B1、B2所产生的离心力为f'B1、f'B2,由方程组
当质量组块中质量块离开调整前的位置时,由于原离心力消失所造成的负向离心力增加,对应轴向位置lA的质量组块调整所造成的负向离心力f'AA,对应轴向位置lB的质量组块调整所造成的负向离心力f'B,f'AA、f'B与指定的标准位置之间按逆时针方向所形成的负向离心力矢量角θ'A、θ'B,由方程组
得到缺失离心力f'AA、f'B与缺失离心力矢量角θ'A、θ'B,其中缺失离心力矢量角360°≤θ'A、θ'B≤0°且与f'A1和f'A2之间的夹角、f'B1和f'B2之间的夹角相背;
进一步地,所述的主轴动平衡双平面等效力平衡在线调节方法,校验每个调整平面的动平衡调整能力:调整平面A内由缺失离心力f'A和不平衡作用力FD的等效力FA'合成力大小为F1,调整平面B内由缺失离心力f'B和不平衡作用力FD的等效力FB'合成力大小为F2,由方程组
当动平衡调整装置的调整能力满足要求时,则满足方程组
否则则说明动平衡调整装置无法实现该时刻主轴系统动不平衡状态的调整;
进一步地,所述的主轴动平衡双平面等效力平衡在线调节方法,根据等效力及调整质量块所产生的负向离心力,计算动平衡质量组块所需产生的平衡力FA、FB及矢量方向θA、θB,由方程组
其中平衡力FA、FB的矢量方向角大小360°≤θA、θB≤0°且与f'AA和FA'所夹角度、f'B与FB'所夹角度相背;
进一步地,所述的主轴动平衡双平面等效力平衡在线调节方法,为实现主轴系统的动平衡,对应轴向位置lA的质量组块中质量块A1和质量块A2需调整并产生离心力为fA1、fA2,fA1=|f'A1|、fA2=|f'A2|,fA1、fA2的矢量方向与指定的标准位置之间按逆时针方向所形成的夹角为αA1、αA2,对应轴向位置lB的质量组块中质量块B1和质量块B2需调整并产生离心力为fB1、fB2,fB1=|f'B1|、fB2=|f'B2|,fB1、fB2的矢量方向与指定的标准位置之间按逆时针方向所形成的夹角为αB1、αB2;由方程组
将两组质量组块中质量块所需产生的离心力fA1、fA2、fB1、fB2的矢量方向角αA1、αA2、αB1、αB2与相应质量块调整前的矢量方向角γA1、γA2、γB1、γB2之间的夹角βA1、βA2、βB1、βB2定义为质量块的调整值,由方程组
其中夹角βA1、βA2、βB1、βB2的正负表明动平衡调整所需相应质量块调整旋转的方向,其中正值表示相应质量块需逆时针方向旋转相应角度,负值表示相应质量块需顺时针方向旋转相应角度;当计算结果为多组可行解时,根据工程需要,选择质量块调整角度综合最小的一组解。
进一步地,所述的主轴动平衡双平面等效力平衡在线调节方法,当主轴所有可能产生的动不平衡矢量作用位置可以视为固定时,主轴动平衡调整可采用一个质量组块实现,即一个调整平面,调整平面的位置应与主轴动不平衡矢量作用位置重合;主轴动平衡的单平面调整可视为双平面调整方法的特例,相关方法及算法也可根据双平面调整方法经过适当处理获得。
本发明的有益效果为:本发明针对采用机械式质量块主轴动平衡调整装置在充分考虑动平衡装置特性的情况下实现主轴动平衡的双平面等效力平衡在线调节,适合各种主轴运行工况。从所获特性可知该方法可用于主轴动平衡调整系统以提高高速主轴的回转精度,从而实现高质量零件的加工。本发明的调节方法简单、高效,本发明综合考虑动平衡调整过程中调整装置质量中心转移产生负向离心力的情况,从而调整质量组块中质量块的位置实现调节主轴的动不平衡状态。
附图说明
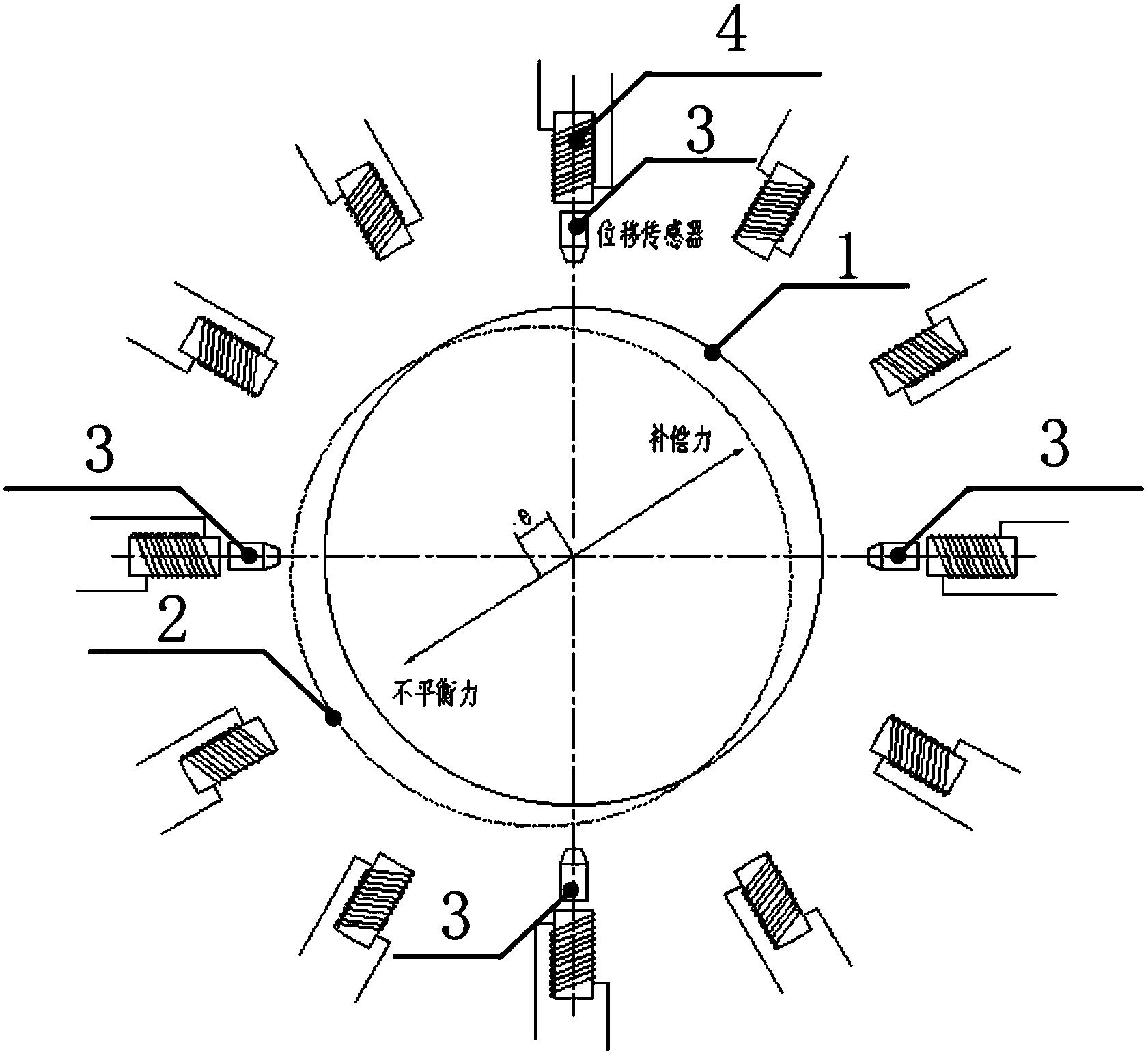
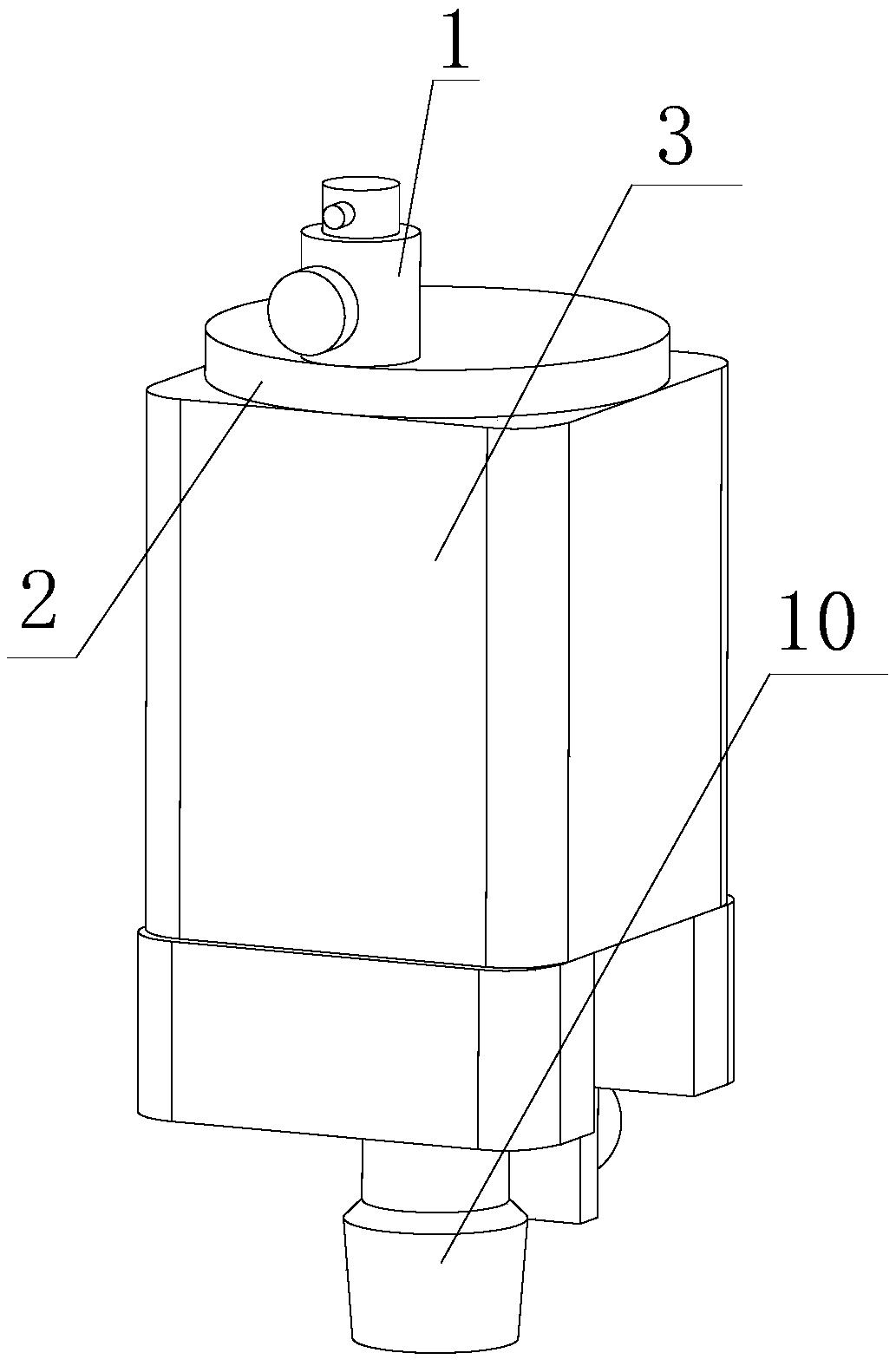
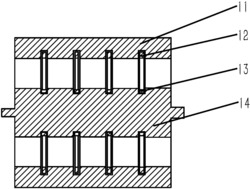
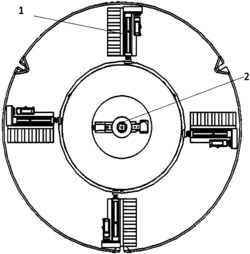
图1为本发明具体实施方式中采用的一种主轴内置机械式动平衡装置示意图;
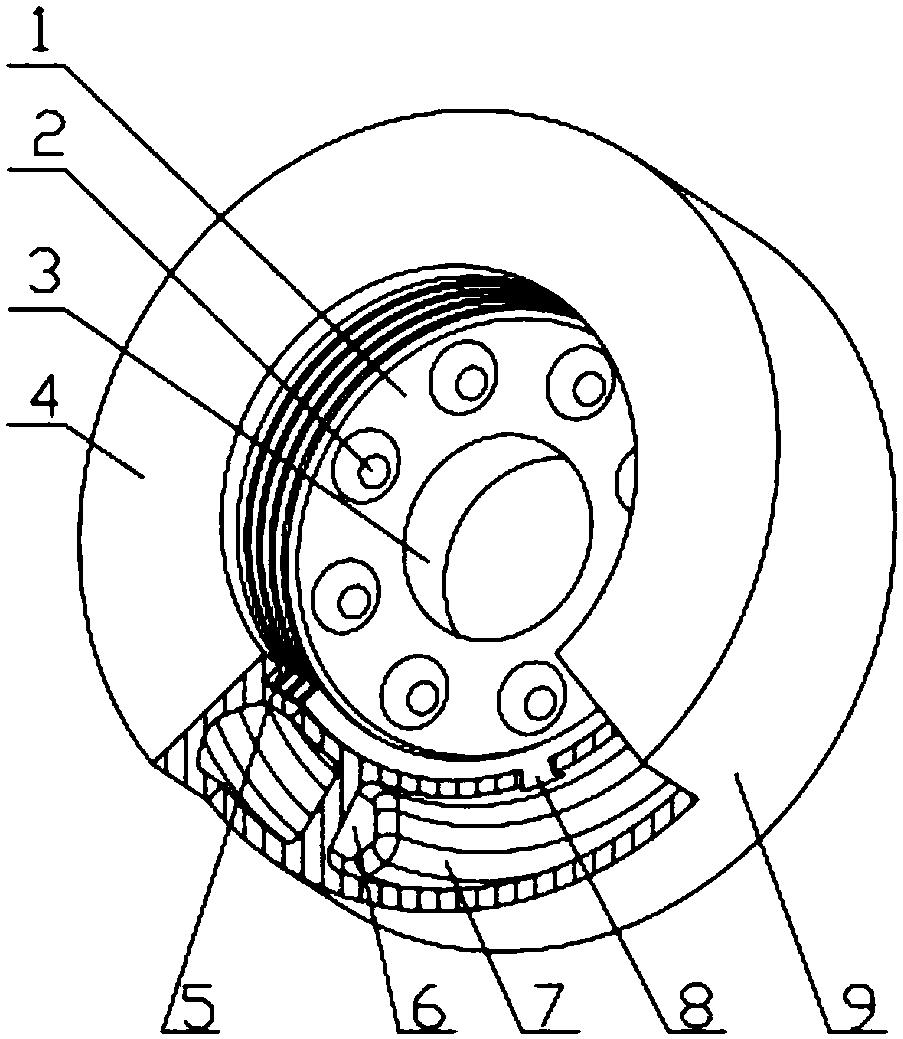
图2为本发明具体实施例中质量组块内质量块布置示意图;
图3为本发明具体实施方式的主轴动平衡在线调节方法原理示意图;
图4为本发明具体实施的流程图;
图5为本发明具体实施方式的缺失离心力矢量计算原理示意图;
图6为本发明具体实施方式的校验动平衡调整能力方法的示意图;
图7为本发明具体实施方式中所需产生的平衡力计算原理示意图
图8为本发明具体实施方式中质量块调整后所处矢量位置关系示意图;
图9为本发明具体实施方式的质量块调整角度计算原理示意图;
其中,1-质量组块;2-质量组块;3-质量块;4-质量块;A、B-两质量组块平所在主轴轴向位置;FD–测量得到的引起主轴不平衡离心力合力;D-工作时主轴产生的动不平衡力FD作用位置;lA、lB-两质量组块平面所在轴向位置;A1、A2-在A位置质量组块内对应的两质量块;mA1、mA2-质量块A1、A2的偏心质量;B1、B2-在B位置质量组块内对应的两质量块;mB1、mB2-B平面内质量块的偏心质量;αA1、αA2-质量块A1、A2所产生离心力合力的夹角;αB1、αB2-质量块B1、B2所产生离心力合力的夹角;βA1、βA2-质量块A1、A2需调整的角度;βB1、βB2-质量块B1、B2需调整的角度;ω-工作时主轴的转速;FA'、FB'-FD等效分解到质量组块平面的离心力分量;γA1、γA2、γB1、γB2-质量块质量中心与指定的标准位置之间按逆时针方向所形成的夹角;f'A1、f'A2、f'B1、f'B2-调整前质量块在主轴ω转速下所产生的离心力;fA1、fA2、fB1、fB2-调整后质量块在主轴ω转速下所产生的离心力;f'AA、f'B-质量组块调整所造成的负向离心力;θ'A、θ'B-负向离心力的矢量角;FA、FB-质量组块所需产生的平衡力;θA、θB-质量组块所需产生的矢量方向角。
具体实施方式
下面通过实施例和附图对本发明作进一步详述。
实施例:
本实施例以一种主轴内置机械式动平衡装置调整主轴动平衡的工况为例,本发明涉及一种考虑动平衡装置特性的主轴动平衡双平面等效力平衡在线调节方法,如图1所示,该主轴动平衡调整装置由同心且并列的质量组块1和质量组块2组成,质量组块即为动平衡调整平面,调整平面与主轴轴向垂直,所述两个质量组块即两个动平衡调整平面,对应质量组块1的调整平面为调整平面A,对应质量组块2的调整平面为调整平面B;如图2所示,每个质量调整组块包括大质量块3、小质量块4,大质量块3和小质量块4均为扇形块,相互套置,均可绕质量组块的回转中心点旋转,对应调整平面A的质量组块1中大质量块定义为质量块A1、质量为mA1=100.5g、由半圆形产生质量偏心距回转中心点距离为RA1=26mm,对应调整平面A的质量组块1中小质量块定义为质量块A2、质量为mA2=189.5g、由半圆形产生质量偏心距回转中心点距离为RA2=13.79mm,对应调整平面B的质量组块2中大质量块定义为质量块B1、质量为mB1=100.6g、由半圆形产生质量偏心距回转中心点距离为RB1=26mm,对应调整平面B的质量组块2中小质量块定义为质量块B2、质量为mB2=189.4g、由半圆形产生质量偏心距回转中心点距离为RB2=13.79mm;本实例的动平衡装置内置于主轴内孔中并与主轴形成完整的系统,动平衡装置及其质量组块的回转中心与主轴的回转中心重合,主轴的平衡及其调整即为主轴系统的平衡和调整;在动平衡装置安装状态下,调整平面A所对应的质量组块1置于主轴A点位置,调整平面B所对应的质量组块2置于主轴B点位置,A点、B点分别是调整平面A和调整平面B对应的质量组块1和质量组块2的回转中心;工作状态下,主轴系统旋转并产生动不平衡时,通过动平衡调整装置的两组质量组块中的质量块的移动产生平衡力及附加动不平衡力,当平衡力矢量与附加动不平衡力矢量、主轴系统的动不平衡矢量之和为零时主轴系统达到新的动平衡状态,该过程为执行校正主轴系统的动不平衡,动平衡装置的结构、动平衡装置在主轴上安装状态、主轴动平衡的调整原理可以简化为图3所示结构与原理。
如图4,具体包括以下步骤:
步骤一主轴系统低速转动,标定两组质量组块在主轴轴向方向位置lA、lB;如图3,标定方法:分别调整调整面A或调整面B所对应质量组块中的质量块,通过测量计算由于调整质量块所发生动不平衡所施加不平衡离心力的位置,移动质量块A1、A2而质量块B1、B2不动,所产生不平衡离心力的位置即为调整面A的位置点A点,移动质量块B1、B2而质量块A1、A2不动,所产生不平衡离心力的位置即为调整面B的位置点B点,计算可知A点和B点距近端轴套固定端的坐标原点距离lA=183mm、lB=383mm;
步骤二主轴系统工作转速ω=8000r/min情况下,监测主轴的动平衡状态;如图3,初始状态主轴系统动平衡达到要求,为说明本发明,特在距近端轴套固定端250mm、半径距离80mm处放置一质量10g的物体并产生离心力使得主轴系统产生不平衡状态,因此该质量引起的动不平衡矢量FD作用在主轴回转中心D点的位置,其大小为2.0192×1012g·mm/min2,即约为0.5609kN,其与坐标原点的距离为lD=250mm,离心力FD的矢量方向为θ=25°;
步骤三双平面受力等效分解,如图3,即将与坐标原点距离为lD的D点位置的等效动不平衡作用力FD等效分解为作用在与坐标原点距离分别为lA、lB的A点和B点位置的等效力FA'、FB',其大小由方程组
计算得FA'=0.1879kN、FB'=0.373kN,等效力FA'、FB'的矢量方向角大小均与FD相等,为25°;
步骤四计算调整平面A和调整平面B当质量块移除时所产生的缺失离心力f'AA、f'B与缺失离心力矢量角θ'A、θ'B;如图5所示,质量块调整前的工作状态下,对应轴向位置lA的质量组块1中质量块A1和A2的质量中心与指定的标准位置之间按逆时针方向所形成的夹角为γA1=65°、γA2=105°,对应轴向位置lB的质量组块2中质量块B1、B2的质量中心与指定的标准位置之间按逆时针方向所形成的夹角为γB1=65°、γB2=105°;根据主轴工作转速ω,调整前,质量块A1、A2所产生的离心力为f'A1、f'A2,质量块B1、B2所产生的离心力为f'B1、f'B2,由方程组
得f'A1≈1.83kN,f'A2≈1.83kN,f'B1≈1.83kN,f'B2≈1.83kN。
当质量组块中质量块离开调整前的位置时,由于原离心力消失所造成的负向离心力增加,对应轴向位置lA的质量组块1调整所造成的负向离心力f'AA,对应轴向位置lB的质量组块2调整所造成的负向离心力f'B,f'AA、f'B与指定的标准位置之间按逆时针方向所形成的负向离心力矢量角θ'A、θ'B,由方程组
得到缺失离心力f'A=f'B=3.44kN与缺失离心力矢量角θ'A=θ'B=275°;
步骤五校验每个调整平面的动平衡调整能力;如果调整平面A或调整平面B中任一调整平面的动平衡调整无法实现,则提示动平衡调整能力不足,转到执行步骤九;如图6所示,调整平面A内由缺失离心力f'A和不平衡作用力FD的等效力FA'合成力大小为F1,调整平面B内由缺失离心力f'B和不平衡作用力FD的等效力FB'合成力大小为F2,由方程组
得F1≈3.38kN,F2≈3.33kN;因F1<f'A1+f'A2=3.66kN、F2<f'B1+f'B2=3.66kN,所以动平衡调整装置的调整能力能够满足要求;
步骤六计算调整平面A和调整平面B中质量组块调整所需产生的平衡力FA、FB及矢量方向θA、θB;如图7所示,根据等效力及调整质量块所产生的负向离心力,计算动平衡质量组块所需产生的平衡力FA、FB及矢量方向θA、θB,由方程组
计算得FA≈3.38kN、FB≈3.33kN,θA≈82.05°、θB≈79.04°;
步骤七计算质量块A1、A2、B1、B2所需调整的角度βA1、βA2、βB1、βB2;如图8所示,为实现主轴系统的动平衡,对应轴向位置lA的质量组块1中质量块A1和质量块A2需调整并产生离心力为fA1、fA2,fA1=|f'A1|、fA2=|f'A2|,fA1、fA2的矢量方向与指定的标准位置之间按逆时针方向所形成的夹角为αA1、αA2,对应轴向位置lB的质量组块2中质量块B1和质量块B2需调整并产生离心力为fB1、fB2,fB1=|f'B1|、fB2=|f'B2|,fB1、fB2的矢量方向与指定的标准位置之间按逆时针方向所形成的夹角为αB1、αB2;由方程组
计算得每个调整平面均为两组解,对于调整平面A,其解为αA1≈104.61°、αA2≈59.49°或αA1≈59.49°、αA2≈104.61°,对于调整平面B,其为αB1≈103.56°、αB2≈54.522°或αB1≈54.522°、αB2≈103.56°;
如图9所示,将两组质量组块中质量块所需产生的离心力fA1、fA2、fB1、fB2的矢量方向角αA1、αA2、αB1、αB2与相应质量块调整前的矢量方向角γA1、γA2、γB1、γB2之间的夹角βA1、βA2、βB1、βB2定义为质量块的调整值,由方程组
计算得βA1=39.61、βA2=-45.51或βA1=-5.51、βA2=-0.39,βB1=38.56、βB2=-50.478或βB1=-1.44、βB2=-10.478;计算结果中,数值部分表示相应质量块需要调整的角度,工程上通常希望调整的角度尽量小,相比较而言的调整速度会快些,所以最后取结果为βA1=-5.51、βA2=-0.39、βB1=-1.44、βB2=-10.478,其中负号表示相应质量块顺时针调整相应的角度;
步骤八调整质量块的角度,完成主轴系统的动平衡调整;
步骤九准备下一次的动平调整,返回步骤二。
一种主轴动平衡双平面等效力平衡在线调节方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0