









专利摘要
本实用新型公开了一种6自由度控制手柄,包括基座、肩关节、大臂关节、小臂关节、肘关节、手腕关节、手爪和传感器;所述基座、肩关节、大臂关节、小臂关节、肘关节、手腕关节依次两两之间通过旋转轴互相连接,且它们两两之间通过旋转轴做摆动运动;所述传感器内嵌在上述旋转轴上,用于采集这些摆动运动的角度信号;所述手腕关节和手爪之间通过旋转轴连接,可以做360°连续旋转,旋转轴上设置有传感器,用于获得二者之间相对旋转的角度信号。该手柄具有多关节、多自由度、多功能,且操纵灵活,可靠性高,美观大方,简单操作即可获得复杂的控制信号,尤其适合于工业机械臂和水下机械臂的主从控制操作。
权利要求
1.一种6自由度控制手柄,包括基座、肩关节、大臂关节、小臂关节、肘关节、手腕关节、手爪和传感器,其特征在于:所述基座、肩关节、大臂关节、小臂关节、肘关节、手腕关节依次两两之间通过旋转轴互相连接,且它们两两之间通过旋转轴做摆动运动;所述传感器内嵌在上述旋转轴上,用于采集这些摆动运动的角度信号;所述手腕关节和手爪之间通过旋转轴连接,可以做360°连续旋转,旋转轴上设置有传感器,用于获得二者之间相对旋转的角度信号。
2.根据权利要求1所述的一种6自由度控制手柄,其特征在于:所述基座带有轴伸,该轴伸和肩关节内衬套上的孔配合,相互转动;肩关节内套有肩关节内衬套,并和肩关节传感器端盖一起用紧定螺钉固定到肩关节上;基座轴向内部安装有传感器,该传感器伸出轴的内凹槽与肩关节传感器端盖上的凸起部分相互配合;在肩关节内衬套和基座轴之间沿轴向分别还安装有第一轴承垫片、第一轴承、第一预紧弹簧、第一预紧弹簧预紧螺母、第一锁紧螺母,第一轴承垫片一面紧贴着肩关节内衬套,另外一侧和第一轴承一侧接触;第一轴承的另外一侧与第一预紧弹簧一侧接触,第一预紧弹簧的另外一侧和第一预紧弹簧预紧螺母接触,第一预紧弹簧预紧螺母上的螺纹与基座轴上的螺纹配合,第一预紧弹簧预紧螺母的上侧紧贴着第一锁紧螺母,第一锁紧螺母的螺纹也与基座轴上的螺纹配合,用于实现弹簧预紧。
3.根据权利要求2所述的一种6自由度控制手柄,其特征在于:所述大臂关节包括第一大臂关节和第二大臂关节两部分,第一大臂关节的一侧设有凸起的轴,该凸起轴与第二大臂关节相配合,在径向采用紧定螺钉固定。
4.根据权利要求3所述的一种6自由度控制手柄,其特征在于:所述肩关节一端带有垂向的轴伸,该轴伸和第一大臂关节上的孔配合,相互转动;肩关节的轴伸的内孔上安装有传感器,该传感器伸出轴的内凹槽与传感器止定端盖上的凸起部分相互配合,而传感器端盖通过紧定螺钉固定到第一大臂关节上,传感器后端的孔上还安装有传感器端盖;在肩关节的轴和第一大臂关节的孔之间沿轴向分别还安装有第二轴承垫片、第二轴承、第二预紧弹簧、第二预紧弹簧预紧螺母、第二锁紧螺母,第二轴承垫片一面紧贴着第一大臂关节的内侧,另外一侧和第二轴承一侧接触;第二轴承的另外一侧与第二预紧弹簧一侧接触,第二预紧弹簧的另外一侧和第二预紧弹簧预紧螺母接触,第二预紧弹簧预紧螺母上的螺纹与肩关节的轴伸上的螺纹配合,第二预紧弹簧预紧螺母的上侧紧贴着第二锁紧螺母,第二锁紧螺母的螺纹也与肩关节的轴伸上的螺纹配合,用于实现弹簧预紧。
5.根据权利要求3所述的一种6自由度控制手柄,其特征在于:所述第二大臂关节一端带有垂向的轴伸,该轴伸和小臂关节上的孔配合,相互转动;第二大臂关节的轴伸的内孔上安装有传感器,该传感器伸出轴的内凹槽与传感器止定端盖上的凸起部分相互配合,而传感器止定端盖通过紧定螺钉固定到小臂关节上,传感器后端的孔上还安装有传感器端盖;在第二大臂关节的轴和小臂关节的孔之间沿轴向分别还安装有第三轴承垫片、第三轴承、第三预紧弹簧、第三预紧弹簧预紧螺母、第三锁紧螺母,第三轴承垫片一面紧贴着小臂关节的内侧,另外一侧和第三轴承一侧接触;第三轴承的另外一侧与第三预紧弹簧一侧接触,第三预紧弹簧的另外一侧和第三预紧弹簧预紧螺母接触,第三预紧弹簧预紧螺母上的螺纹与第二大臂关节轴伸上的螺纹配合,第三预紧弹簧预紧螺母的上侧紧贴着第三锁紧螺母,第三锁紧螺母的螺纹也与第二大臂关节轴伸上的螺纹配合,用于实现弹簧预紧。
6.根据权利要求5所述的一种6自由度控制手柄,其特征在于:所述小臂关节一侧的内孔上沿轴向分别安装了传感器、带有轴伸的小臂关节连接块、肘关节连接块、第四轴承垫片、第四轴承、第四预紧弹簧、第四预紧弹簧预紧螺母、第四锁紧螺母、肘关节传感器端盖和肘关节;小臂关节连接块的一侧用紧定螺钉固定在小臂关节的内孔里,小臂关节连接块的轴伸与肘关节连接块上的内孔配合,相互转动;第四轴承垫片一面紧贴着肘关节连接块的内侧,另外一侧和第四轴承一侧接触;第四轴承的另外一侧与第四预紧弹簧一侧接触,第四预紧弹簧的另外一侧和第四预紧弹簧预紧螺母接触,第四预紧弹簧预紧螺母上的螺纹与小臂关节连接块的轴伸上的螺纹配合,第四预紧弹簧预紧螺母的上侧紧贴着第四锁紧螺母,第四锁紧螺母的螺纹也与小臂关节连接块的轴伸上的螺纹配合,用于实现弹簧预紧。
7.根据权利要求6所述的一种6自由度控制手柄,其特征在于:所述肘关节传感器端盖和肘关节连接块的另外一侧内孔配合一起安装在肘关节的内孔上,并用周向的紧定螺钉固定;传感器安装在小臂关节连接块内孔上,该传感器伸出轴的内凹槽与肘关节关节传感器端盖上的凸起部分相互配合;所述肘关节另外一端带有垂向的轴伸,该轴伸和手腕关节上的孔配合,相互转动;肘关节的轴伸的内孔上安装有传感器,该传感器伸出轴的内凹槽与传感器止定端盖上的凸起部分相互配合,而传感器止定端盖通过紧定螺钉固定到手腕关节上,传感器后端的孔上还安装有传感器端盖;在肘关节的轴和小臂关节的孔之间沿轴向分别还安装有第五轴承垫片、第五轴承、第五预紧弹簧、第五预紧弹簧预紧螺母、第五锁紧螺母,第五轴承垫片一面紧贴着小臂关节的内侧,另外一侧和第五轴承一侧接触;第五轴承的另外一侧与第五预紧弹簧一侧接触,第五预紧弹簧的另外一侧和第五预紧弹簧预紧螺母接触,第五预紧弹簧预紧螺母上的螺纹与肘关节的轴伸上的螺纹配合,第五预紧弹簧预紧螺母的上侧紧贴着第五锁紧螺母,第五锁紧螺母的螺纹也与肘关节轴伸上的螺纹配合,用于实现弹簧预紧。
8.根据权利要求7所述的一种6自由度控制手柄,其特征在于:所述手腕关节沿轴向带有轴伸,轴向上分别安装了导电滑环、手腕旋转传感器固定盖、传感器、手爪、总锁定按钮、手爪开合按钮固定环、手爪开合按钮;所述导电滑环和手腕关节的轴伸的外径配合,一侧端面紧贴着手腕关节的内孔底部;手腕关节轴伸的内孔和传感器的伸出轴配合,沿径向有一个固定螺钉将手腕关节的伸出轴和传感器伸出轴固定;传感器固定到手腕旋转传感器固定盖的内孔上,它们沿轴向用紧定螺钉固定到手爪上,手爪的另外侧的轴端上安装了总锁定按钮;手爪开合按钮固定环内孔和手爪外圆配合,它们沿径向上用紧定螺钉固定;手爪开合按钮沿圆周均布于手爪开合按钮固定环上,并用紧定螺钉固定于手爪开合按钮固定环上。
9.根据权利要求8所述的一种6自由度控制手柄,其特征在于:所述手腕关节和手爪之间内置有导电滑环,可以使手腕关节和手爪相互之间做360°连续旋转运动;所述导电滑环用于传递手爪开合控制按钮和总锁定按钮的控制信号,同时不受手腕关节和手爪连续旋转的限制。
10.根据权利要求1至9任一项所述的一种6自由度控制手柄,其特征在于:所述基座、肩关节、第一大臂关节和第二大臂关节、小臂关节、肘关节、手腕关节和手爪的内部均为中空结构,内部设有导线槽,用于布放内部的导线;所述基座、肩关节、大臂关节、小臂关节、肘关节和手腕关节均使用轻质材料。
说明书
技术领域
本实用新型属于自动控制技术领域,涉及到机器人技术,具体涉及一种6 自由度控制手柄。
背景技术
工业机械手臂为了实现空间上的定位和定姿,一般都具有6个及以上自由度,对于大于6个自由度的机械手臂具有多个冗余度,在控制上过于复杂,除非在极特殊的场合才会采用,因而大多数的工业机械手臂为6个自由度。工业机械手臂在用于非结构化环境,尤其是水下机械臂作业时,主从控制的方式是比较常用的,这个时候就需要使用外部设备发送控制指令给机械臂,使用控制手柄是一种比较常用的方式。
传统的6自由度机械臂的控制手柄有采用简单的开关按钮的控制方式,这种开关按钮控制方式的控制手柄通常不能用于精密控制要求的机械手臂,因而使用场合受到很大限制;还有就是使用更为复杂的控制手柄,甚至是需要两个手操作才能控制好6自由度机械臂的手柄,这些手柄过于复杂,严重影响了机械手臂的操作,也增加了操作人员的作业负担。
实用新型内容
针对现有技术中存在的上述问题,本实用新型提供了一种6自由度控制手柄,该手柄具有多关节、多自由度、多功能,且操纵灵活,可靠性高,美观大方。
为此,本实用新型采用了以下技术方案:
一种6自由度控制手柄,包括基座、肩关节、大臂关节、小臂关节、肘关节、手腕关节、手爪和传感器;所述基座、肩关节、大臂关节、小臂关节、肘关节、手腕关节依次两两之间通过旋转轴互相连接,且它们两两之间通过旋转轴做摆动运动;所述传感器内嵌在上述旋转轴上,用于采集这些摆动运动的角度信号;所述手腕关节和手爪之间通过旋转轴连接,可以做360°连续旋转,旋转轴上设置有传感器,用于获得二者之间相对旋转的角度信号。
进一步地,所述基座带有轴伸,该轴伸和肩关节内衬套上的孔配合,相互转动;肩关节内套有肩关节内衬套,并和肩关节传感器端盖一起用紧定螺钉固定到肩关节上;基座轴向内部安装有传感器,该传感器伸出轴的内凹槽与肩关节传感器端盖上的凸起部分相互配合;在肩关节内衬套和基座轴之间沿轴向分别还安装有第一轴承垫片、第一轴承、第一预紧弹簧、第一预紧弹簧预紧螺母、第一锁紧螺母,第一轴承垫片一面紧贴着肩关节内衬套,另外一侧和第一轴承一侧接触;第一轴承的另外一侧与第一预紧弹簧一侧接触,第一预紧弹簧的另外一侧和第一预紧弹簧预紧螺母接触,第一预紧弹簧预紧螺母上的螺纹与基座轴上的螺纹配合,第一预紧弹簧预紧螺母的上侧紧贴着第一锁紧螺母,第一锁紧螺母的螺纹也与基座轴上的螺纹配合,用于实现弹簧预紧。
进一步地,所述大臂关节包括第一大臂关节和第二大臂关节两部分,第一大臂关节的一侧设有凸起的轴,该凸起轴与第二大臂关节相配合,在径向采用紧定螺钉固定。
进一步地,所述肩关节一端带有垂向的轴伸,该轴伸和第一大臂关节上的孔配合,相互转动;肩关节的轴伸的内孔上安装有传感器,该传感器伸出轴的内凹槽与传感器止定端盖上的凸起部分相互配合,而传感器端盖通过紧定螺钉固定到第一大臂关节上,传感器后端的孔上还安装有传感器端盖;在肩关节的轴和第一大臂关节的孔之间沿轴向分别还安装有第二轴承垫片、第二轴承、第二预紧弹簧、第二预紧弹簧预紧螺母、第二锁紧螺母,第二轴承垫片一面紧贴着第一大臂关节的内侧,另外一侧和第二轴承一侧接触;第二轴承的另外一侧与第二预紧弹簧一侧接触,第二预紧弹簧的另外一侧和第二预紧弹簧预紧螺母接触,第二预紧弹簧预紧螺母上的螺纹与肩关节的轴伸上的螺纹配合,第二预紧弹簧预紧螺母的上侧紧贴着第二锁紧螺母,第二锁紧螺母的螺纹也与肩关节的轴伸上的螺纹配合,用于实现弹簧预紧。
进一步地,所述第二大臂关节一端带有垂向的轴伸,该轴伸和小臂关节上的孔配合,相互转动;第二大臂关节的轴伸的内孔上安装有传感器,该传感器伸出轴的内凹槽与传感器止定端盖上的凸起部分相互配合,而传感器止定端盖通过紧定螺钉固定到小臂关节上,传感器后端的孔上还安装有传感器端盖;在第二大臂关节的轴和小臂关节的孔之间沿轴向分别还安装有第三轴承垫片、第三轴承、第三预紧弹簧、第三预紧弹簧预紧螺母、第三锁紧螺母,第三轴承垫片一面紧贴着小臂关节的内侧,另外一侧和第三轴承一侧接触;第三轴承的另外一侧与第三预紧弹簧一侧接触,第三预紧弹簧的另外一侧和第三预紧弹簧预紧螺母接触,第三预紧弹簧预紧螺母上的螺纹与第二大臂关节轴伸上的螺纹配合,第三预紧弹簧预紧螺母的上侧紧贴着第三锁紧螺母,第三锁紧螺母的螺纹也与第二大臂关节轴伸上的螺纹配合,用于实现弹簧预紧。
进一步地,所述小臂关节一侧的内孔上沿轴向分别安装了传感器、带有轴伸的小臂关节连接块、肘关节连接块、第四轴承垫片、第四轴承、第四预紧弹簧、第四预紧弹簧预紧螺母、第四锁紧螺母、肘关节传感器端盖和肘关节;小臂关节连接块的一侧用紧定螺钉固定在小臂关节的内孔里,小臂关节连接块的轴伸与肘关节连接块上的内孔配合,相互转动;第四轴承垫片一面紧贴着肘关节连接块的内侧,另外一侧和第四轴承一侧接触;第四轴承的另外一侧与第四预紧弹簧一侧接触,第四预紧弹簧的另外一侧和第四预紧弹簧预紧螺母接触,第四预紧弹簧预紧螺母上的螺纹与小臂关节连接块的轴伸上的螺纹配合,第四预紧弹簧预紧螺母的上侧紧贴着第四锁紧螺母,第四锁紧螺母的螺纹也与小臂关节连接块的轴伸上的螺纹配合,用于实现弹簧预紧。
进一步地,所述肘关节传感器端盖和肘关节连接块的另外一侧内孔配合一起安装在肘关节的内孔上,并用周向的紧定螺钉固定;传感器安装在小臂关节连接块内孔上,该传感器伸出轴的内凹槽与肘关节关节传感器端盖上的凸起部分相互配合;所述肘关节另外一端带有垂向的轴伸,该轴伸和手腕关节上的孔配合,相互转动;肘关节的轴伸的内孔上安装有传感器,该传感器伸出轴的内凹槽与传感器止定端盖上的凸起部分相互配合,而传感器止定端盖通过紧定螺钉固定到手腕关节上,传感器后端的孔上还安装有传感器端盖;在肘关节的轴和小臂关节的孔之间沿轴向分别还安装有第五轴承垫片、第五轴承、第五预紧弹簧、第五预紧弹簧预紧螺母、第五锁紧螺母,第五轴承垫片一面紧贴着小臂关节的内侧,另外一侧和第五轴承一侧接触;第五轴承的另外一侧与第五预紧弹簧一侧接触,第五预紧弹簧的另外一侧和第五预紧弹簧预紧螺母接触,第五预紧弹簧预紧螺母上的螺纹与肘关节的轴伸上的螺纹配合,第五预紧弹簧预紧螺母的上侧紧贴着第五锁紧螺母,第五锁紧螺母的螺纹也与肘关节轴伸上的螺纹配合,用于实现弹簧预紧。
进一步地,所述手腕关节沿轴向带有轴伸,轴向上分别安装了导电滑环、手腕旋转传感器固定盖、传感器、手爪、总锁定按钮、手爪开合按钮固定环、手爪开合按钮;所述导电滑环和手腕关节的轴伸的外径配合,一侧端面紧贴着手腕关节的内孔底部;手腕关节轴伸的内孔和传感器的伸出轴配合,沿径向有一个固定螺钉将手腕关节的伸出轴和传感器伸出轴固定;传感器固定到手腕旋转传感器固定盖的内孔上,它们沿轴向用紧定螺钉固定到手爪上,手爪的另外侧的轴端上安装了总锁定按钮;手爪开合按钮固定环内孔和手爪外圆配合,它们沿径向上用紧定螺钉固定;手爪开合按钮沿圆周均布于手爪开合按钮固定环上,并用紧定螺钉固定于手爪开合按钮固定环上。
进一步地,所述手腕关节和手爪之间内置有导电滑环,可以使手腕关节和手爪相互之间做360°连续旋转运动;所述导电滑环用于传递手爪开合控制按钮和总锁定按钮的控制信号,同时不受手腕关节和手爪连续旋转的限制。
优选地,所述基座、肩关节、第一大臂关节和第二大臂关节、小臂关节、肘关节、手腕关节和手爪的内部均为中空结构,内部设有导线槽,用于布放内部的导线;所述基座、肩关节、大臂关节、小臂关节、肘关节和手腕关节均使用轻质材料。
与现有技术相比,本实用新型的有益效果是:
(1)可以实现复杂的手柄信号传递,具有6个自由度和多个开关按钮信号。
(2)结构紧凑、操作方便、灵活。
(3)可以实现手柄位置保持和锁定的效果。
(4)外形简洁、控制灵活可靠,简单操作即可获得复杂的控制信号,尤其适合于工业机械臂和水下机械臂的主从控制操作。
附图说明
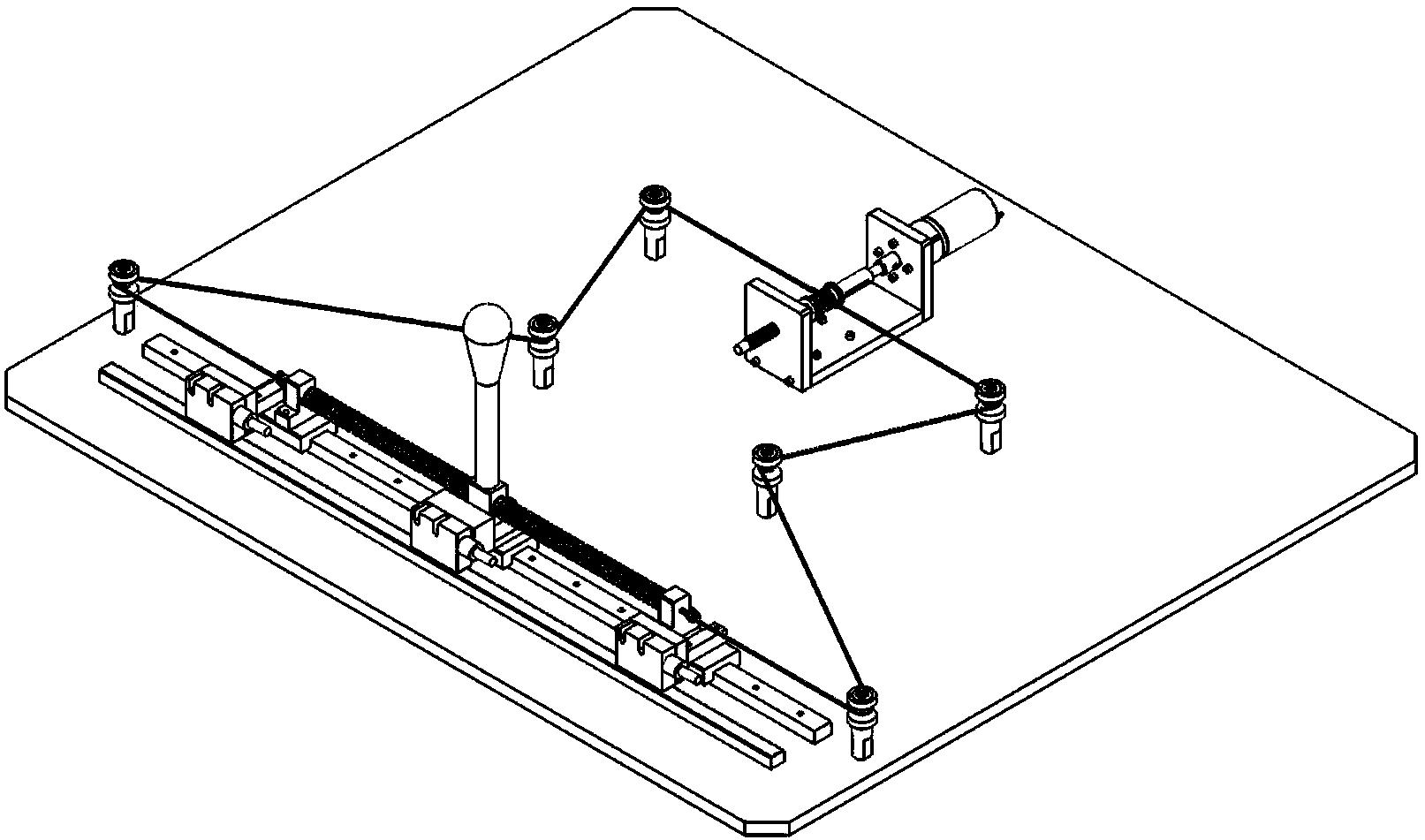
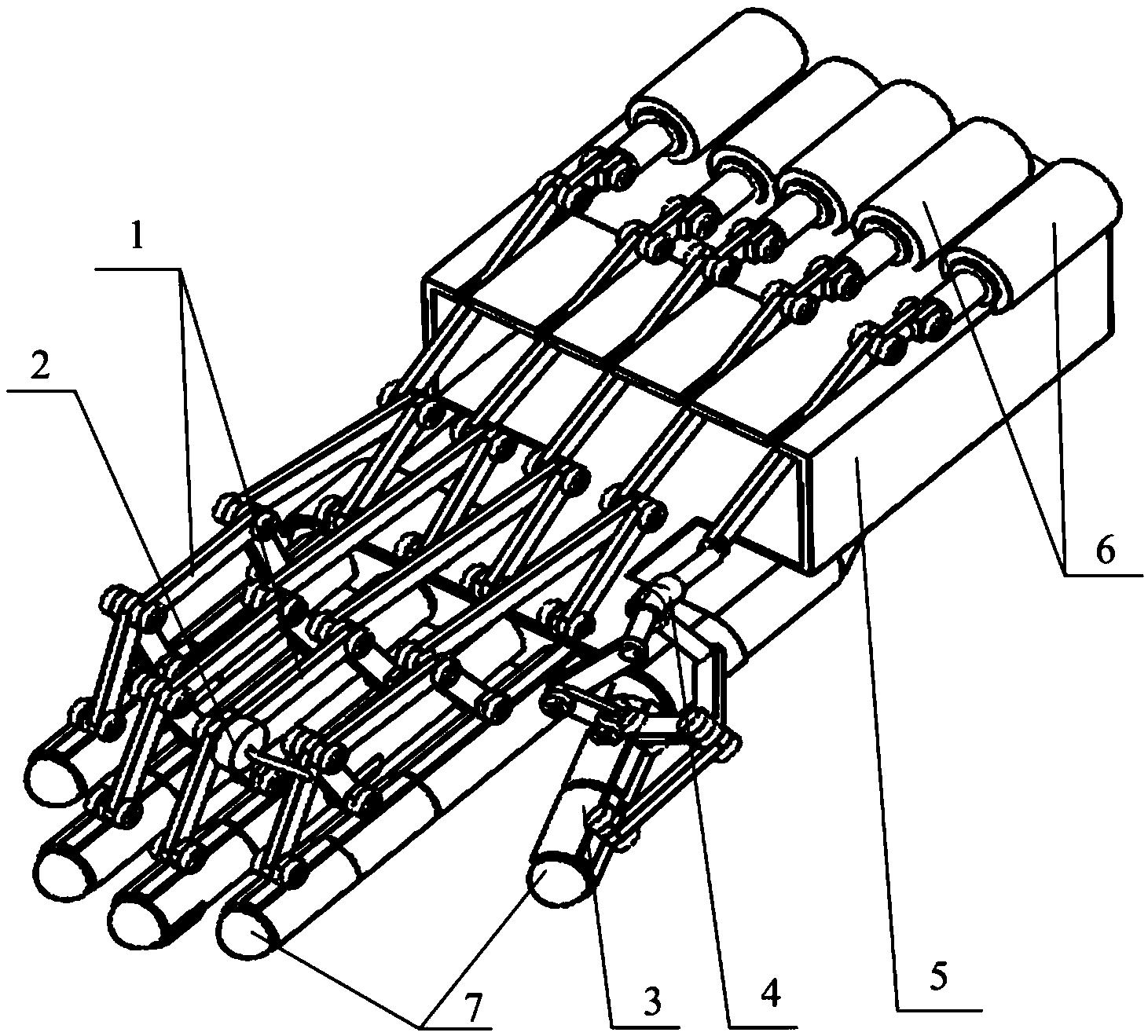
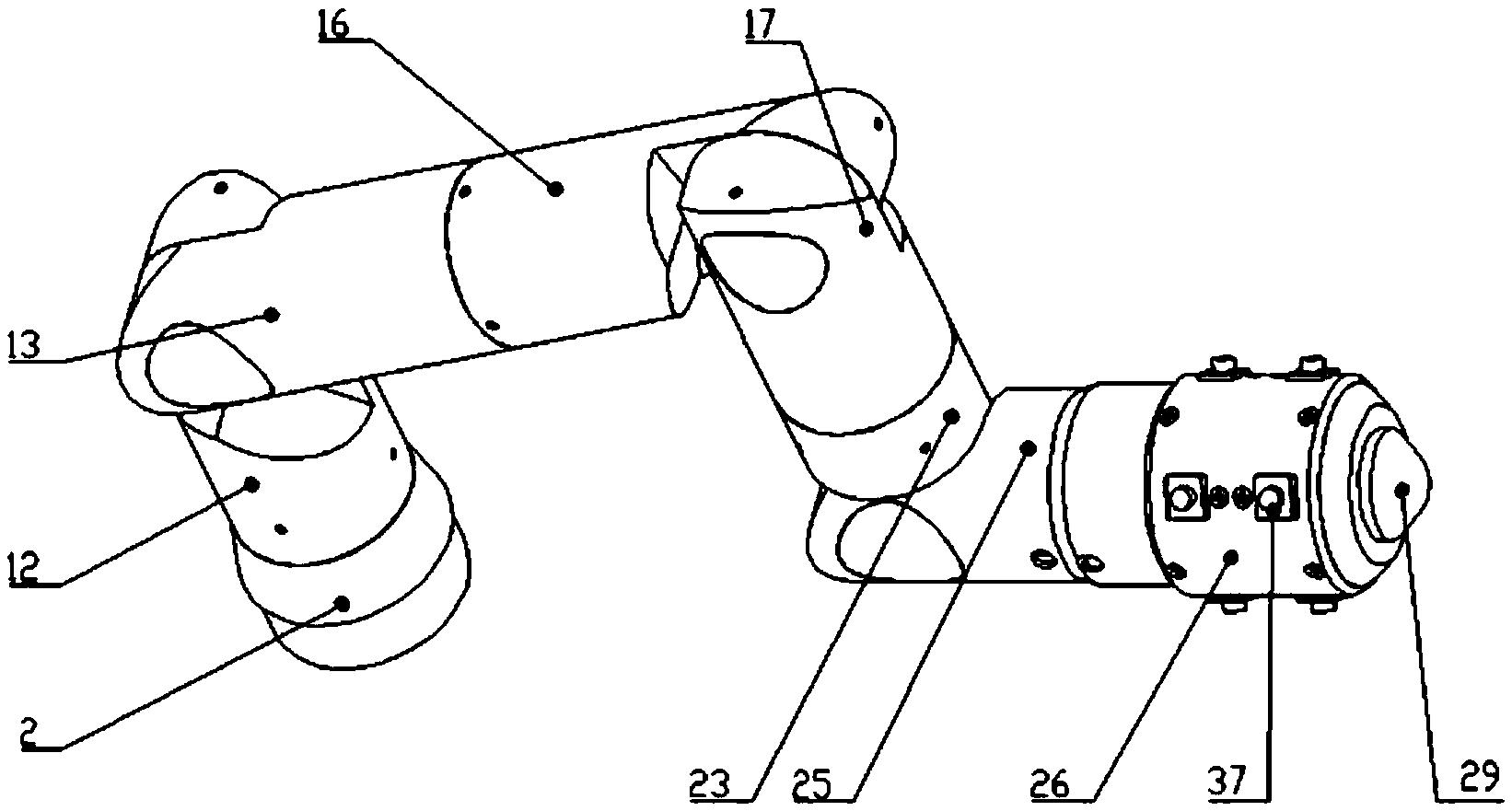
图1是本实用新型所提供的一种6自由度控制手柄的组成结构示意图。
图2是本实用新型所提供的一种6自由度控制手柄的总装配结构示意图。
图3是本实用新型所提供的一种6自由度控制手柄的A-A剖视图。
图4是本实用新型所提供的一种6自由度控制手柄的俯视图及局部剖视图。
附图标记说明:1、导线束;2、基座;3、传感器;4-1、第一轴承垫片;5-1、第一轴承;6-1、第一预紧弹簧;7-1、第一预紧弹簧预紧螺母;8-1、第一锁紧螺母;4-2、第二轴承垫片;5-2、第二轴承;6-2、第二预紧弹簧;7-2、第二预紧弹簧预紧螺母;8-2、第二锁紧螺母;4-3、第三轴承垫片;5-3、第三轴承; 6-3、第三预紧弹簧;7-3、第三预紧弹簧预紧螺母;8-3、第三锁紧螺母;4-4、第四轴承垫片;5-4、第四轴承;6-4、第四预紧弹簧;7-4、第四预紧弹簧预紧螺母;8-4、第四锁紧螺母;4-5、第五轴承垫片;5-5、第五轴承;6-5、第五预紧弹簧;7-5、第五预紧弹簧预紧螺母;8-5、第五锁紧螺母;9、紧定螺钉;10、肩关节传感器端盖;11、肩关节内衬套;12、肩关节;13、第一大臂关节;14、导线束;15、紧定螺钉;16、第二大臂关节;17、小臂关节;18、导线束;19、小臂关节连接块;20、肘关节连接块;21、紧定螺钉;22、肘关节传感器端盖; 23、肘关节;24、导线束;25、手腕关节;26、手爪开合按钮固定环;27、紧定螺钉;28、手爪;29、总锁定按钮;30、紧定螺钉;31、手腕旋转传感器固定盖; 32、导电滑环;33、导线束;34、传感器止定端盖;35、传感器端盖;36、紧定螺钉;37、手爪开合按钮;38、紧定螺钉。
具体实施方式
下面结合附图以及具体实施例来详细说明本实用新型,其中的具体实施例以及说明仅用来解释本实用新型,但并不作为对本实用新型的限定。
如图1~图2所示,本实用新型公开了一种6自由度控制手柄,包括基座2、肩关节12、大臂关节13和16、小臂关节17、肘关节23、手腕关节25、手爪28 和传感器3;所述基座2、肩关节12、大臂关节13和16、小臂关节17、肘关节 23、手腕关节25依次两两之间通过旋转轴互相连接,且它们两两之间通过旋转轴做摆动运动;所述传感器3内嵌在上述旋转轴上,用于采集这些摆动运动的角度信号;所述手腕关节25和手爪28之间通过旋转轴连接,可以做360°连续旋转,旋转轴上设置有传感器3,用于获得二者之间相对旋转的角度信号。
具体地,如图2所示,所述基座2带有轴伸,该轴伸和肩关节内衬套11上的孔配合,相互转动;肩关节12内套有肩关节内衬套11,并和肩关节传感器端盖10一起用紧定螺钉9固定到肩关节12上;基座2轴向内部安装有传感器3,该传感器伸出轴的内凹槽与肩关节传感器端盖11上的凸起部分相互配合;在肩关节内衬套11和基座轴之间沿轴向分别还安装有第一轴承垫片4-1、第一轴承 5-1、第一预紧弹簧6-1、第一预紧弹簧预紧螺母7-1、第一锁紧螺母8-1,第一轴承垫片4-1一面紧贴着肩关节内衬套11,另外一侧和第一轴承5-1一侧接触;第一轴承5-1的另外一侧与第一预紧弹簧6-1一侧接触,第一预紧弹簧6-1的另外一侧和第一预紧弹簧预紧螺母7-1接触,第一预紧弹簧预紧螺母7-1上的螺纹与基座轴上的螺纹配合,第一预紧弹簧预紧螺母7-1的上侧紧贴着第一锁紧螺母 8-1,第一锁紧螺母8-1的螺纹也与基座轴上的螺纹配合,用于实现弹簧预紧。
具体地,所述大臂关节包括第一大臂关节13和第二大臂关节16两部分,第一大臂关节13的一侧设有凸起的轴,该凸起轴与第二大臂关节16相配合,在径向采用紧定螺钉15固定。
具体地,如图2和图4所示,所述肩关节12一端带有垂向的轴伸,该轴伸和第一大臂关节13上的孔配合,相互转动;肩关节12的轴伸的内孔上安装有传感器3,该传感器伸出轴的内凹槽与传感器止定端盖34上的凸起部分相互配合,而传感器端盖35通过紧定螺钉固定到第一大臂关节13上,传感器后端的孔上还安装有传感器端盖35;在肩关节12的轴和第一大臂关节13的孔之间沿轴向分别还安装有第二轴承垫片4-2、第二轴承5-2、第二预紧弹簧6-2、第二预紧弹簧预紧螺母7-2、第二锁紧螺母8-2,第二轴承垫片4-2一面紧贴着第一大臂关节13的内侧,另外一侧和第二轴承5-2一侧接触;第二轴承5-2的另外一侧与第二预紧弹簧6-2一侧接触,第二预紧弹簧6-2的另外一侧和第二预紧弹簧预紧螺母7-2接触,第二预紧弹簧预紧螺母7-2上的螺纹与肩关节12的轴伸上的螺纹配合,第二预紧弹簧预紧螺母7-2的上侧紧贴着第二锁紧螺母8-2,第二锁紧螺母8-2的螺纹也与肩关节12的轴伸上的螺纹配合,用于实现弹簧预紧。
具体地,如图2和图3所示,所述第二大臂关节16一端带有垂向的轴伸,该轴伸和小臂关节17上的孔配合,相互转动;第二大臂关节16的轴伸的内孔上安装有传感器3,该传感器伸出轴的内凹槽与传感器止定端盖34上的凸起部分相互配合,而传感器止定端盖34通过紧定螺钉38固定到小臂关节17上,传感器后端的孔上还安装有传感器端盖35;在第二大臂关节16的轴和小臂关节17 的孔之间沿轴向分别还安装有第三轴承垫片4-3、第三轴承5-3、第三预紧弹簧 6-3、第三预紧弹簧预紧螺母7-3、第三锁紧螺母8-3,第三轴承垫片4-3一面紧贴着小臂关节17的内侧,另外一侧和第三轴承5-3一侧接触;第三轴承5-3的另外一侧与第三预紧弹簧6-3一侧接触,第三预紧弹簧6-3的另外一侧和第三预紧弹簧预紧螺母7-3接触,第三预紧弹簧预紧螺母7-3上的螺纹与第二大臂关节 16轴伸上的螺纹配合,第三预紧弹簧预紧螺母7-3的上侧紧贴着第三锁紧螺母 8-3,第三锁紧螺母8-3的螺纹也与第二大臂关节16轴伸上的螺纹配合,用于实现弹簧预紧。
具体地,所述小臂关节17一侧的内孔上沿轴向分别安装了传感器3、带有轴伸的小臂关节连接块19、肘关节连接块20、第四轴承垫片4-4、第四轴承5-4、第四预紧弹簧6-4、第四预紧弹簧预紧螺母7-4、第四锁紧螺母8-4、肘关节传感器端盖22和肘关节23;小臂关节连接块19的一侧用紧定螺钉固定在小臂关节17的内孔里,小臂关节连接块19的轴伸与肘关节连接块20上的内孔配合,相互转动;第四轴承垫片4-4一面紧贴着肘关节连接块20的内侧,另外一侧和第四轴承5-4一侧接触;第四轴承5-4的另外一侧与第四预紧弹簧6-4一侧接触,第四预紧弹簧6-4的另外一侧和第四预紧弹簧预紧螺母7-4接触,第四预紧弹簧预紧螺母7-4上的螺纹与小臂关节连接块19的轴伸上的螺纹配合,第四预紧弹簧预紧螺母7-4的上侧紧贴着第四锁紧螺母8-4,第四锁紧螺母8-4的螺纹也与小臂关节连接块19的轴伸上的螺纹配合,用于实现弹簧预紧。
具体地,所述肘关节传感器端盖22和肘关节连接块20的另外一侧内孔配合一起安装在肘关节23的内孔上,并用周向的紧定螺钉21固定;传感器3安装在小臂关节连接块19内孔上,该传感器伸出轴的内凹槽与肘关节传感器端盖22 上的凸起部分相互配合;所述肘关节23另外一端带有垂向的轴伸,该轴伸和手腕关节25上的孔配合,相互转动;肘关节23的轴伸的内孔上安装有传感器3,该传感器伸出轴的内凹槽与传感器止定端盖34上的凸起部分相互配合,而传感器止定端盖34通过紧定螺钉固定到手腕关节25上,传感器后端的孔上还安装有传感器端盖35;在肘关节23的轴和小臂关节17的孔之间沿轴向分别还安装有第五轴承垫片4-5、第五轴承5-5、第五预紧弹簧6-5、第五预紧弹簧预紧螺母 7-5、第五锁紧螺母8-5,第五轴承垫片4-5一面紧贴着小臂关节17的内侧,另外一侧和第五轴承5-5一侧接触;第五轴承5-5的另外一侧与第五预紧弹簧6-5 一侧接触,第五预紧弹簧6-5的另外一侧和第五预紧弹簧预紧螺母7-5接触,第五预紧弹簧预紧螺母7-5上的螺纹与肘关节23的轴伸上的螺纹配合,第五预紧弹簧预紧螺母7-5的上侧紧贴着第五锁紧螺母8-5,第五锁紧螺母8-5的螺纹也与肘关节23轴伸上的螺纹配合,用于实现弹簧预紧。
具体地,所述手腕关节25沿轴向带有轴伸,轴向上分别安装了导电滑环32、手腕旋转传感器固定盖31、传感器3、手爪28、总锁定按钮29、手爪开合按钮固定环26、手爪开合按钮37;所述导电滑环32和手腕关节25的轴伸的外径配合,一侧端面紧贴着手腕关节25的内孔底部;手腕关节25轴伸的内孔和传感器 3的伸出轴配合,沿径向有一个固定螺钉将手腕关节25的伸出轴和传感器伸出轴固定;传感器3固定到手腕旋转传感器固定盖31的内孔上,它们沿轴向用紧定螺钉30固定到手爪28上,手爪28的另外侧的轴端上安装了总锁定按钮29;手爪开合按钮固定环26内孔和手爪28外圆配合,它们沿径向上用紧定螺钉27 固定;手爪开合按钮37沿圆周均布于手爪开合按钮固定环26上,并用紧定螺钉 36固定于手爪开合按钮固定环26上。
具体地,所述手腕关节25和手爪28之间内置有导电滑环32,可以使手腕关节25和手爪28相互之间做360°连续旋转运动;所述导电滑环32用于传递手爪开合控制按钮37和总锁定按钮29的控制信号,同时不受手腕关节25和手爪28连续旋转的限制。
优选地,所述基座2、肩关节12、第一大臂关节13和第二大臂关节16、小臂关节17、肘关节23、手腕关节25和手爪28的内部均为中空结构,内部设有导线槽,用于布放内部的导线1、14、24和33;所述基座2、肩关节12、大臂关节13和16、小臂关节7、肘关节23和手腕关节25均使用轻质材料。这样使手柄受重力影响达到最小,典型的材料包括聚甲醛等工程塑料。
以上所述仅为本实用新型的较佳实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则范围之内所作的任何修改、等同替换以及改进等,均应包含在本实用新型的保护范围之内。
一种6自由度控制手柄专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0