







专利摘要
本实用新型公开了一种轮式辅助越障装置,由壳体、叶片轮、驱动电机、支撑弹簧、支撑杆组件和套筒组成;叶片轮位于圆筒形的壳体的中心,并通过动力轴与驱动电机同轴连接;叶片轮的叶片与支撑弹簧、支撑杆组件和套筒成套设置,套筒固定在壳体内侧;支撑杆组件中,支撑杆一端穿过套筒与壳体外侧的弧形板固连,支撑杆另一端垂直穿过支撑板并通过端部的滚轮顶压在叶片轮上,支撑弹簧成对安装在支撑板与壳体之间;叶片一侧根部到顶部为圆弧面,随着叶片轮的旋转,支撑杆通过端部的滚轮沿着叶片的圆弧面运动。本实用新型以简单便捷的方式使轮式车辆既能在平坦路面上快速行驶,又能在复杂地面条件下顺利越障,使轮式车辆具有良好的路面适应性和通过能力。
权利要求
1.一种轮式辅助越障装置,其特征在于:
由壳体(1)、叶片轮(8)、驱动电机(13)、支撑弹簧、支撑杆组件以及套筒组成;
所述叶片轮(8)位于圆筒形的壳体(1)的中心,并通过动力轴(12)与驱动电机(13)同轴连接;
所述叶片轮(8)的叶片与支撑弹簧、支撑杆组件和套筒成套设置,所述套筒固定在壳体(1)内侧,所述支撑杆组件由支撑板、弧形板、支撑杆和滚轮组成,所述支撑杆一端穿过套筒与壳体(1)外侧的弧形板固连,支撑杆另一端垂直穿过支撑板并通过端部的滚轮顶压在叶片轮(8)上,所述支撑弹簧成对安装在支撑板与壳体(1)之间;
所述叶片轮(8)的叶片一侧,从叶片根部到叶片顶部为圆弧面,随着叶片轮(8)的旋转,支撑杆通过端部的滚轮沿着叶片的圆弧面运动,从而使弧形板在支撑杆的径向推动力及支撑弹簧弹力的作用下向外扩张或向内收缩运动。
2.如权利要求1所述一种轮式辅助越障装置,其特征在于:
所述轮式辅助越障装置还包括自锁装置,所述自锁装置由直线电机(2)、自锁弹簧(3)、棘爪(4)以及设置在叶片轮(8)上的棘轮齿组成;
在所述叶片轮(8)的一个叶片的顶部外圆周表面上设有棘轮齿,所述直线电机通过安装架固定在壳体(1)上,所述棘爪(4)铰接在安装架上,棘爪(4)的与叶片轮(8)上的棘轮齿相匹配,所述自锁弹簧(3)固定连接在直线电机(2)的输出端与棘爪(4)之间,当直线电机(2)的输出端向外伸出,其通过自锁弹簧(3)将棘爪(4)顶靠在叶片轮(8)上的棘轮齿上,棘爪(4)与叶片轮(8)上的棘轮齿啮合实现自锁。
3.如权利要求1所述一种轮式辅助越障装置,其特征在于:
所述叶片轮(8)设有三个叶片,与之相对应地,所述支撑杆组件有三组,所述套筒有三个,所述支撑弹簧有三组。
说明书
技术领域
本实用新型属于车辆越障技术领域,具体涉及一种轮式辅助越障装置。
背景技术
随着轮式车辆的不断发展,其应用的复杂地形及障碍工况日益增多,然而轮式车辆的车轮适应性较差,难以实现越障或适应较复杂地形,故设计人员开始研发设计专用的越障轮来适应复杂路况,但是,采用针对越障的越障轮虽然能够很好的完成越障,但是其在平坦路面的行驶效率较差,这无疑会对轮式车辆的正常使用造成极大影响。
针对上述问题,辅助越障装置应运而生,其既可以保证车辆在平坦的非障碍轮面高效行驶,也可以使车辆顺利翻越路面障碍。但是,现有的辅助越障装置多针对于特种车辆,在普通轮式车辆中的应用较差,普适性亟待提高。此外,辅助越障装置的结构都比较复杂,不便于灵活使用,极大影响了实用性。
发明内容
针对上述现有技术中存在的缺陷,本实用新型提供了一种轮式辅助越障装置,以简单便捷的方式使轮式车辆既能在平坦路面上快速行驶,又能在复杂地面条件下顺利越障,使轮式车辆具有良好的路面适应性和通过能力。结合说明书附图,本实用新型的技术方案如下:
一种轮式辅助越障装置,由壳体1、叶片轮8、驱动电机13、支撑弹簧、支撑杆组件以及套筒组成;所述叶片轮8位于圆筒形的壳体1的中心,并通过动力轴12与驱动电机13同轴连接;所述叶片轮8的叶片与支撑弹簧、支撑杆组件和套筒成套设置,所述套筒固定在壳体1内侧,所述支撑杆组件由支撑板、弧形板、支撑杆和滚轮组成,所述支撑杆一端穿过套筒与壳体1外侧的弧形板固连,支撑杆另一端垂直穿过支撑板并通过端部的滚轮顶压在叶片轮8上,所述支撑弹簧成对安装在支撑板与壳体1之间;所述叶片轮8的叶片一侧,从叶片根部到叶片顶部为圆弧面,随着叶片轮8的旋转,支撑杆通过端部的滚轮沿着叶片的圆弧面运动,从而使弧形板在支撑杆的径向推动力及支撑弹簧弹力的作用下向外扩张或向内收缩运动。
进一步地,所述轮式辅助越障装置还包括自锁装置,所述自锁装置由直线电机2、自锁弹簧3、棘爪4以及设置在叶片轮8上的棘轮齿组成;在所述叶片轮8的一个叶片的顶部外圆周表面上设有棘轮齿,所述直线电机通过安装架固定在壳体1上,所述棘爪4铰接在安装架上,棘爪4的与叶片轮8上的棘轮齿相匹配,所述自锁弹簧3固定连接在直线电机2的输出端与棘爪4之间,当直线电机2的输出端向外伸出,其通过自锁弹簧3将棘爪4顶靠在叶片轮8上的棘轮齿上,棘爪4与叶片轮8上的棘轮齿啮合实现自锁。
进一步地,所述叶片轮8设有三个叶片,与之相对应地,所述支撑杆组件有三组,所述套筒有三个,所述支撑弹簧有三组。
与现有技术相比,本实用新型的有益效果在于:
1、本实用新型所述轮式辅助越障装置能使轮式车辆既能在平坦路面上快速行驶,又能在复杂地面条件下具有良好的路面适用性和通过能力。
2、本实用新型所述轮式辅助越障装置布置安装在轮式车辆的车轮轮毂上,对各种型号的轮式车辆具有良好的普适性。
3、本实用新型所述轮式辅助越障装置结构简单,使用方便。
附图说明
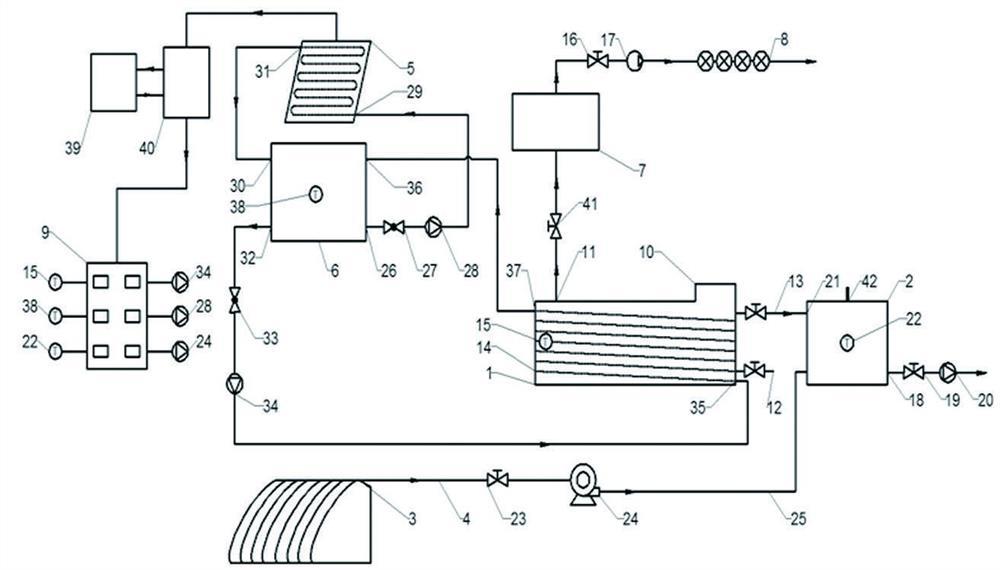
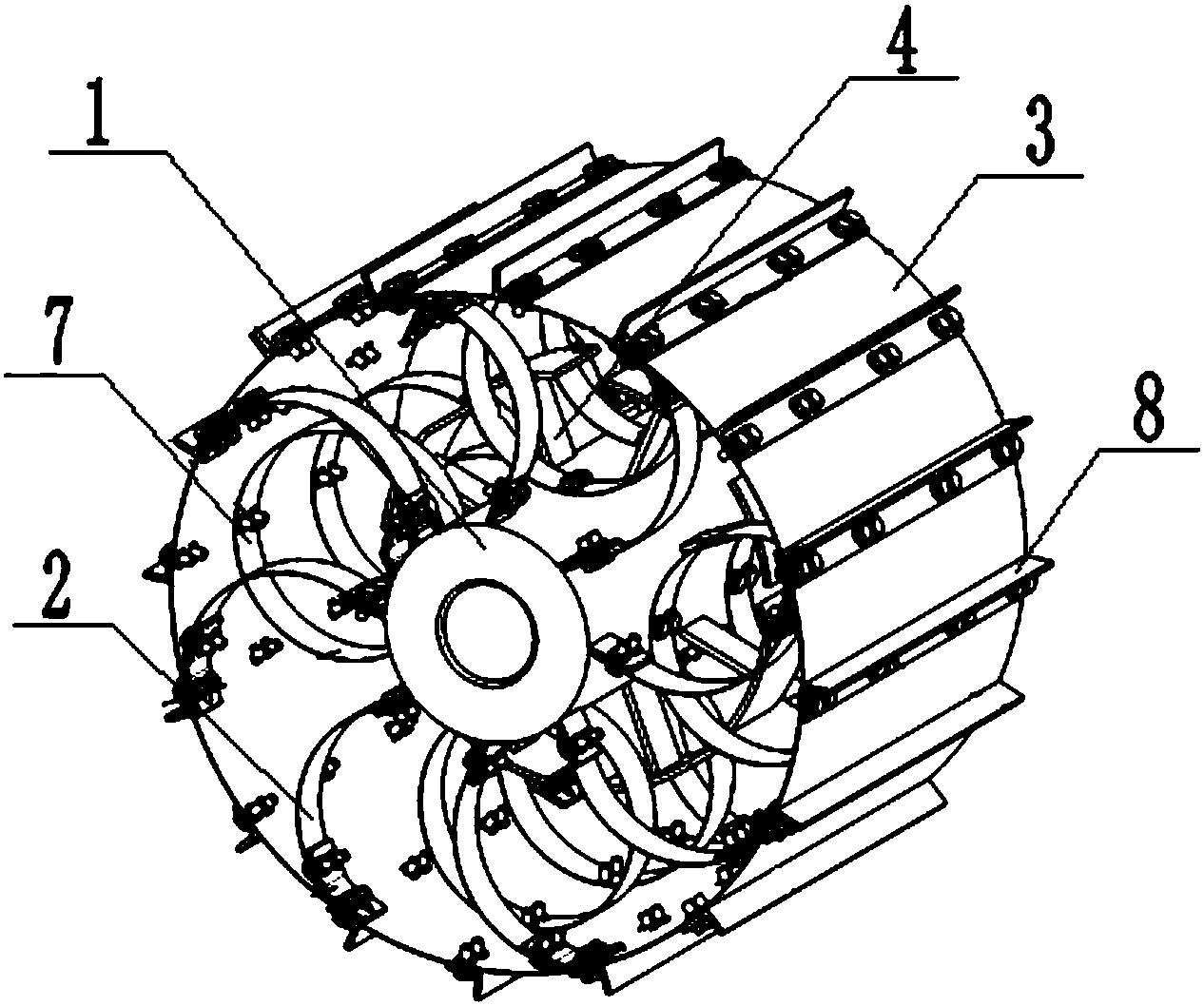
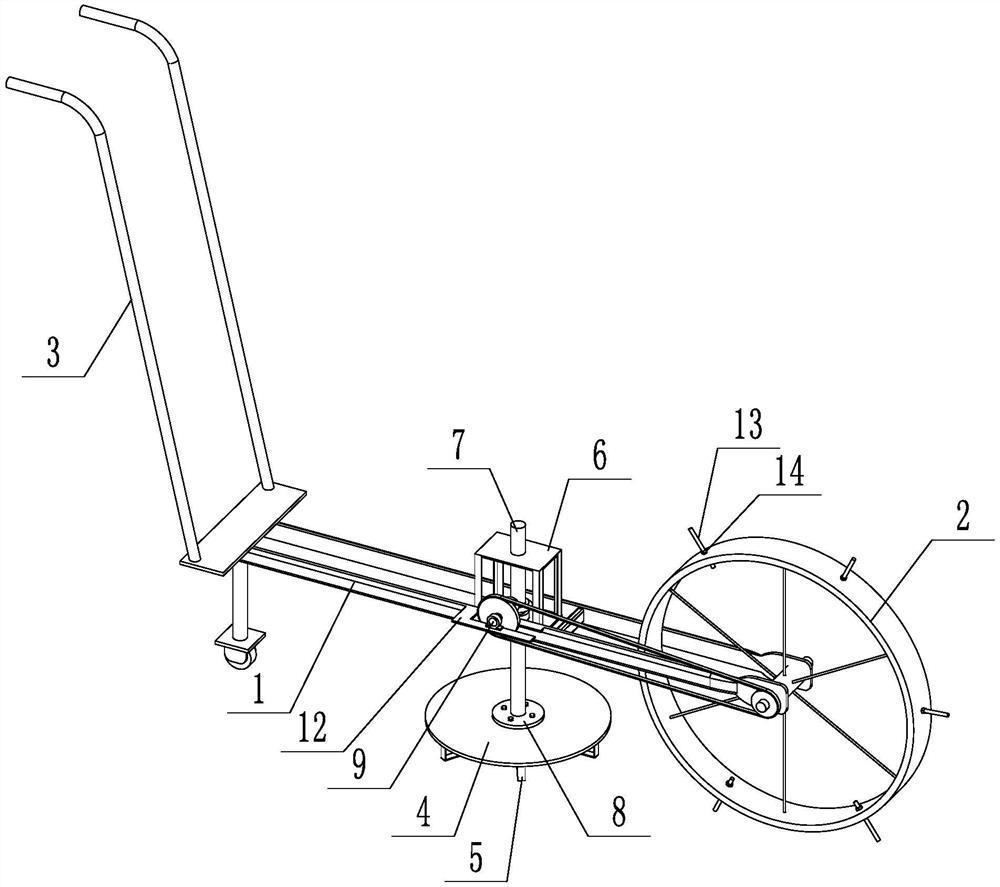
图1为本实用新型所述轮式辅助越障装置的整体结构示意图;
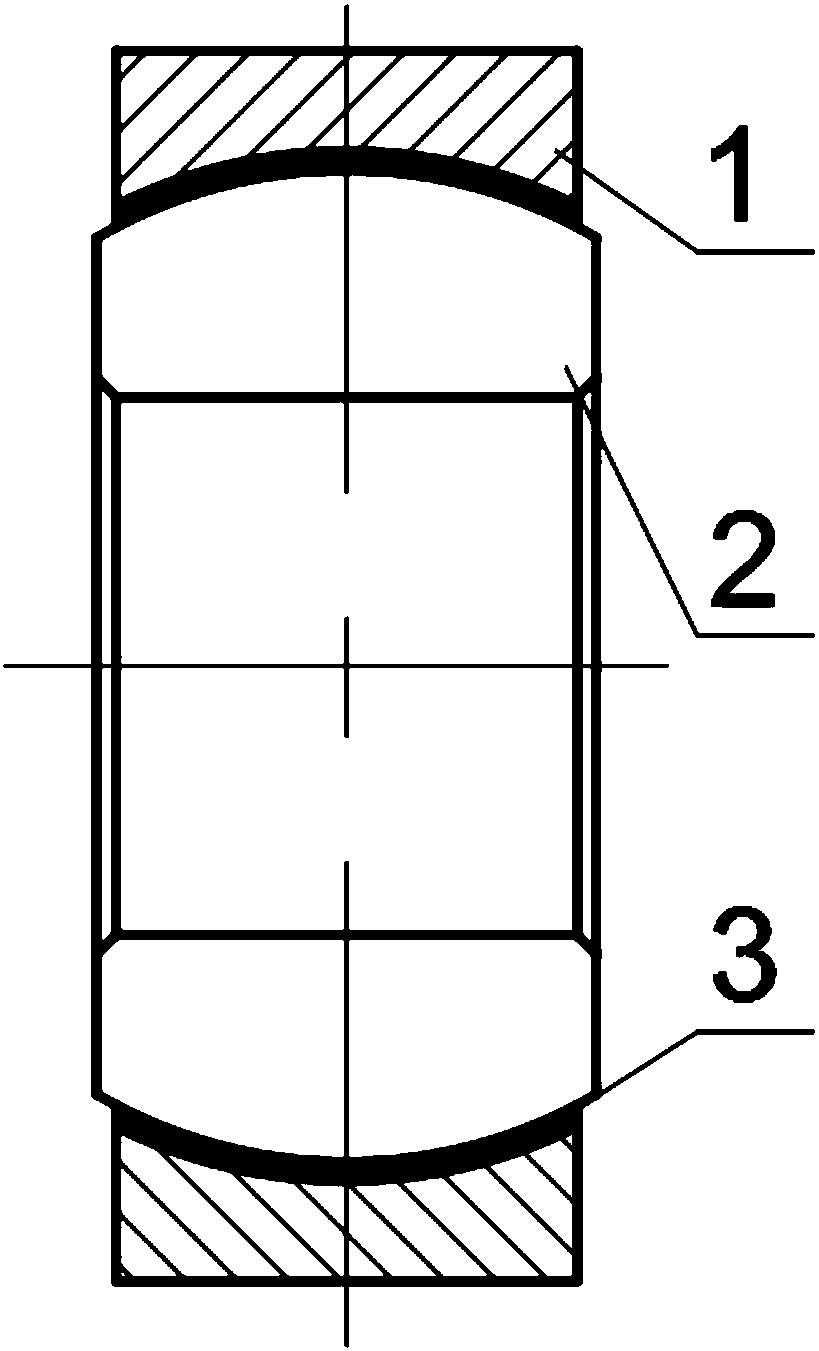
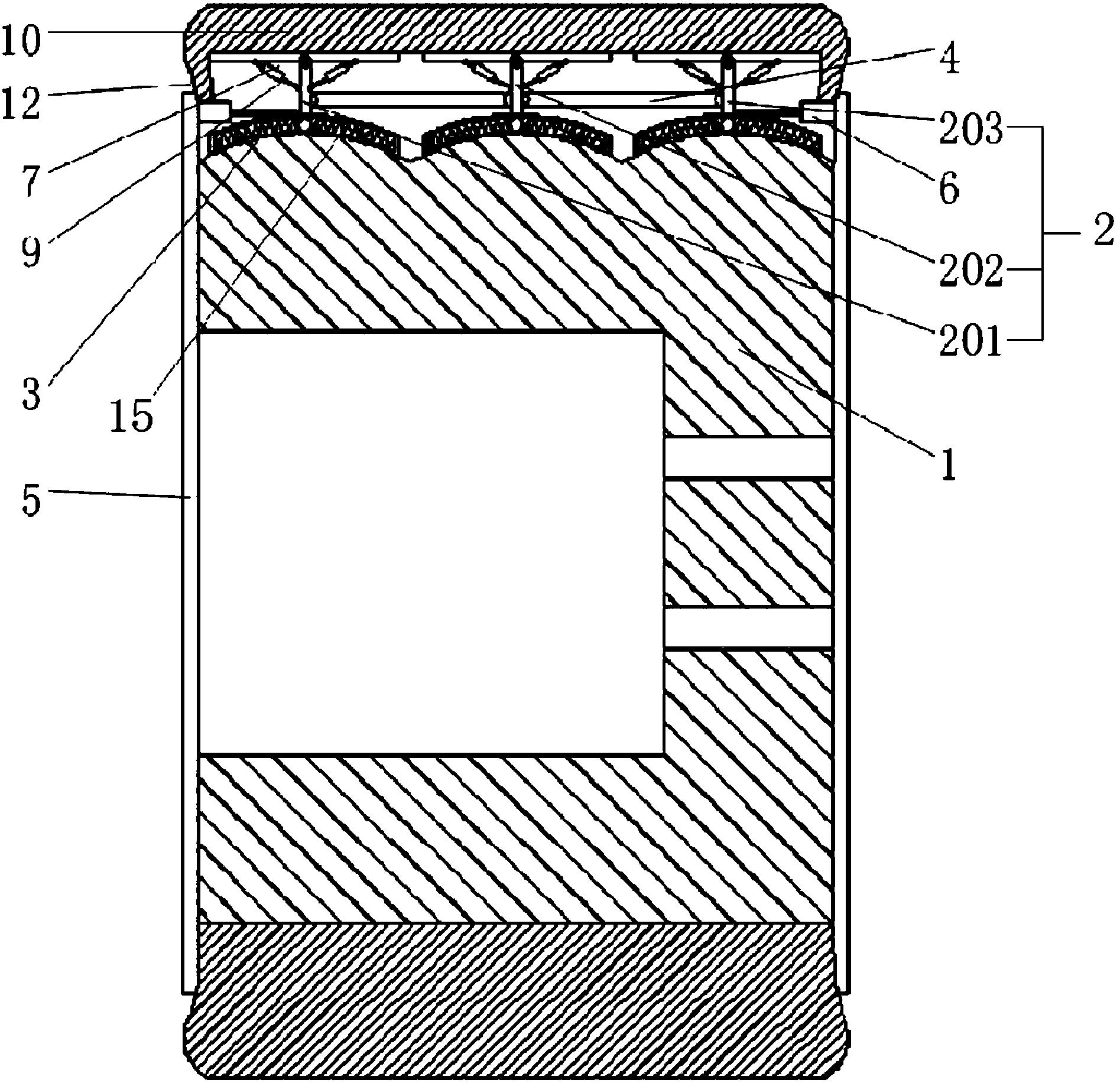
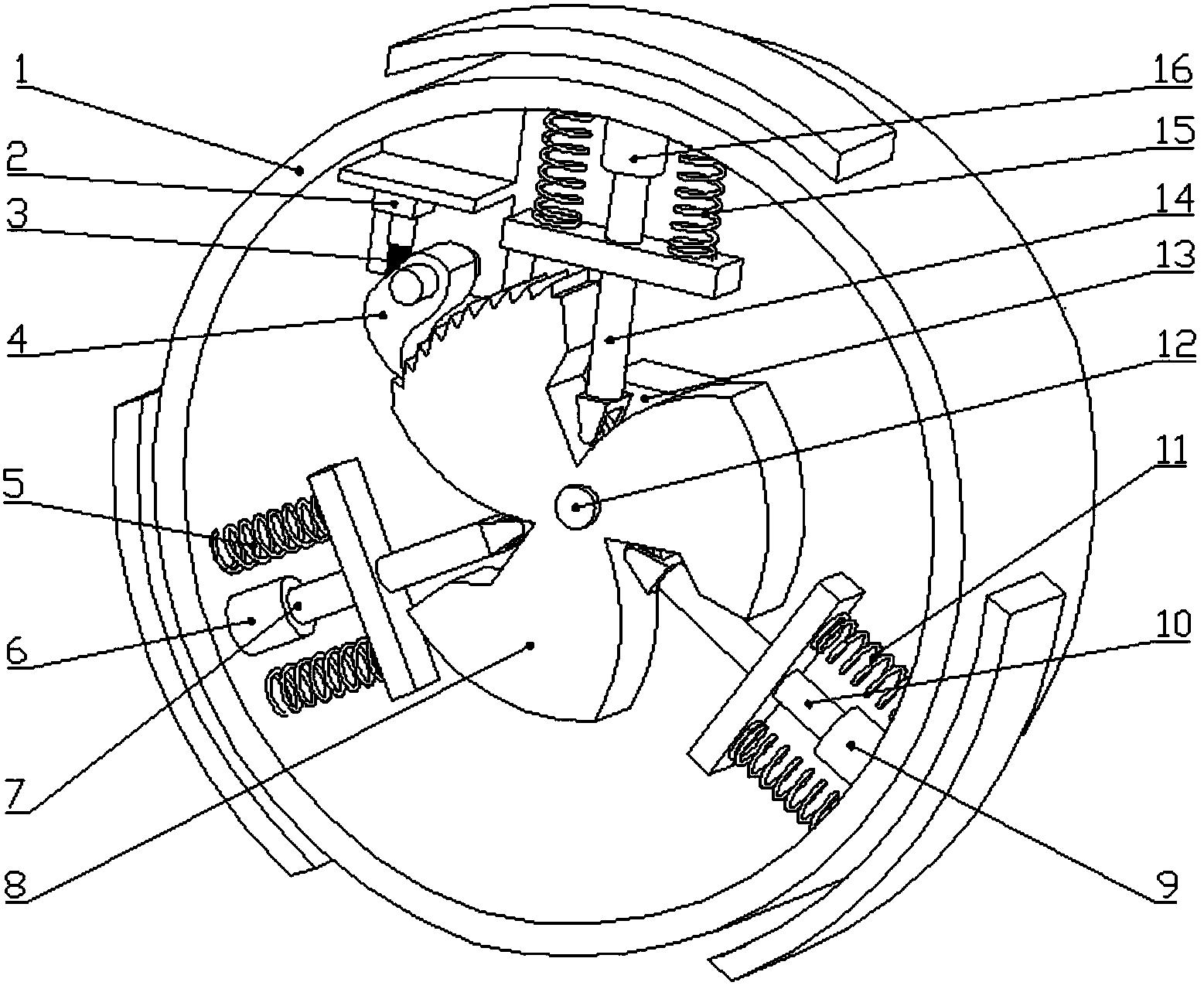
图2为本实用新型所述轮式辅助越障装置的局部结构示意图;
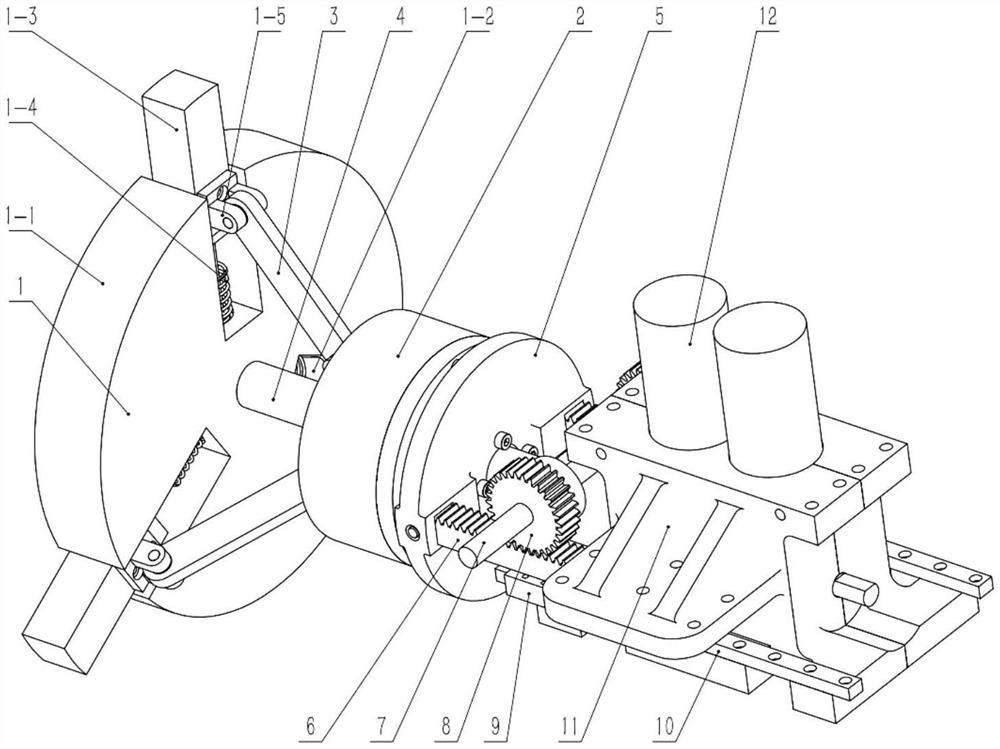
图3为本实用新型所述轮式辅助越障装置与车轮的装配示意图。
图中:
1-壳体, 2-直线电机, 3-自锁弹簧, 4-棘爪,
5-第一支撑弹簧组, 6-第一套筒, 7-第一支撑杆组件, 8-叶片轮,
9-第二套筒, 10-第二支撑杆组件, 11-第二支撑弹簧组, 12-动力轴,
13-驱动电机, 14-第三支撑杆组件, 15-第三支撑弹簧组, 16-第三套筒;
17-车轮, 18-螺栓;
71-第一支撑板, 72-第一弧形板, 73-第一支撑杆, 74-第一滚轮;
101-第二支撑板, 102-第二弧形板, 103-第二支撑杆, 104-第二滚轮;
141-第三支撑板, 142-第三弧形板, 143-第三支撑杆, 144-第三滚轮。
具体实施方式
为进一步阐述本实用新型的技术方案及其工作过程,结合说明书附图,本实用新型的具体实施方式如下:
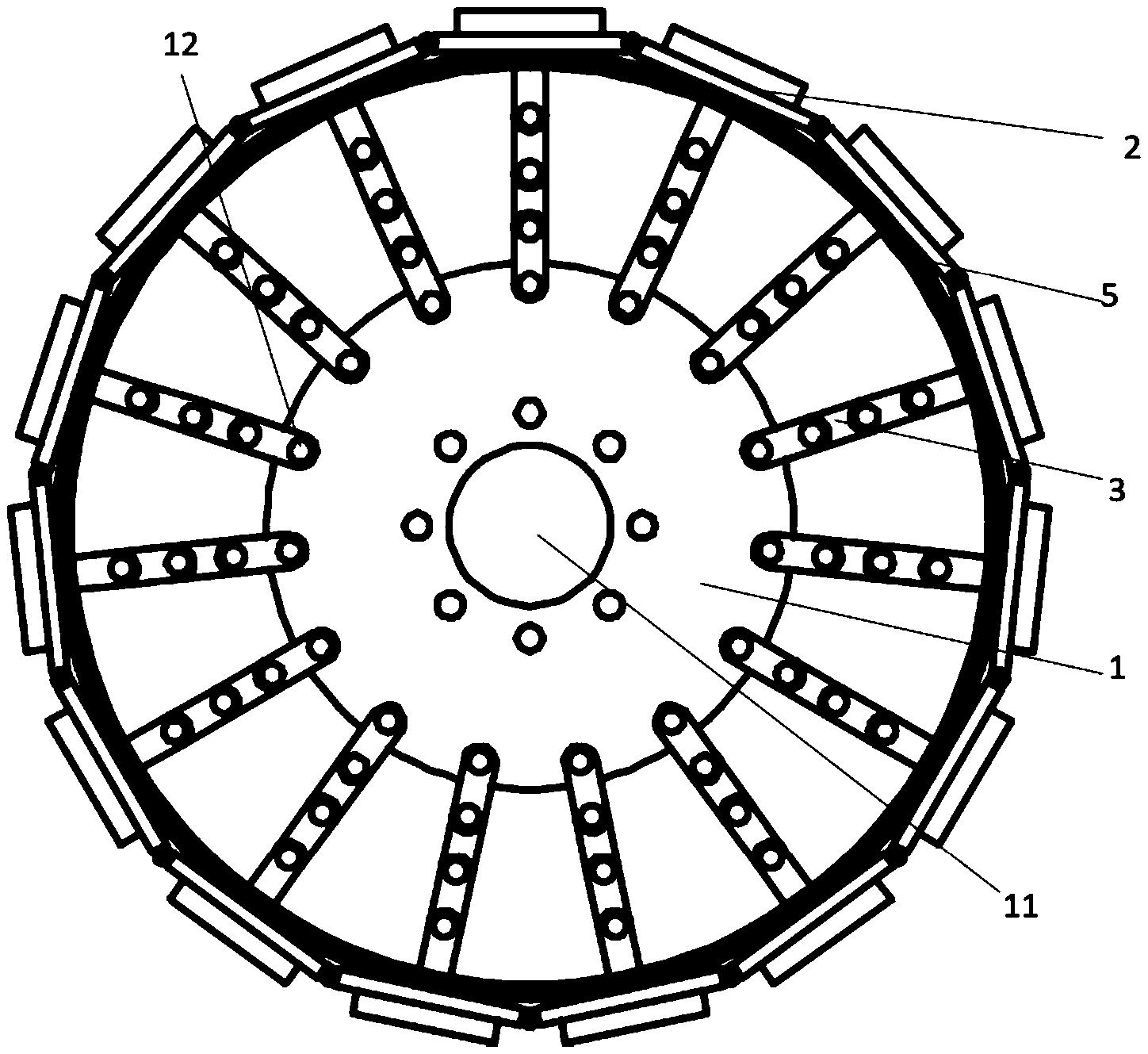
如图1和图2所示,本实用新型公开了一种轮式辅助越障装置,所述装置由壳体1、叶片轮8、驱动电机13、动力轴12、支撑弹簧、支撑杆组件、套筒以及自锁装置组成。其中,所述叶片轮8设有三个叶片,与之相对应地,所述支撑杆组件有三组,分别为:第一支撑杆组件7、第二支撑杆组件10和第三支撑杆组件14;所述套筒有三个,分别为:第一套筒6、第二套筒9和第三套筒16;所述支撑弹簧两根为一组,共有三组,分别为:第一支撑弹簧组5、第二支撑弹簧组11和第三支撑弹簧组15。
所述壳体1为圆筒形;驱动电机13通过连接架固定安装在壳体1上,所述叶片轮8位于壳体1的中心,且叶片轮8的轴线与壳体1的轴线重合,驱动电机13的输出端通过动力轴12与叶片轮8的中心同轴连接,在驱动电机13的驱动下,叶片轮8绕轴线旋转。
所述叶片轮8均匀地设有三个叶片,每个叶片中线之间的夹角均为120°,所述叶片轮8的每个叶片的一个侧面上,从叶片根部到叶片顶部均为形状相同的圆弧面,所述圆弧面分别位于三个叶片的同一侧的侧面。
所述第一套筒6、第二套筒9和第三套筒16分别垂直贯穿地固定安装在壳体1的圆周面上,且第一套筒6、第二套筒9和第三套筒16的轴线分别对应叶片轮8的三个叶片根部位置,即第一套筒6、第二套筒9和第三套筒16中,相连两个套筒之间的夹角均为120°。
所述第一支撑杆组件7由第一支撑板71、第一弧形板72、第一支撑杆73以及第一滚轮74组成;其中,所述第一支撑杆73穿过第一套筒6,所述第一支撑板71位于壳体1的内侧并垂直安装在第一支撑杆73上,所述第一弧形板72位于壳体1的外侧并与第一支撑杆73固定连接,且所述第一弧形板72的径向与第一支撑杆73重合;所述第一滚轮74安装在第一支撑杆73的一端,所述第一滚轮74顶靠在与之对应的叶片轮8的叶片根部;如图2所示,随着叶片轮8逆时针旋转,第一滚轮74沿叶片轮8的第一个叶片的叶片根部至叶片顶部的圆弧面运动并带动第一支撑杆73沿着第一套筒6轴线运动。
所述第二支撑杆组件10的结构与第一支撑杆组件7完全相同,第二支撑杆组件10由第二支撑板101、第二弧形板102、第二支撑杆103以及第二滚轮104组成;所述第二支撑杆103穿过第二套筒9,所述第二支撑板101位于壳体1的内侧并垂直安装在第二支撑杆103上,所述第二弧形板102位于壳体1的外侧并与第二支撑杆103固定连接,且所述第二弧形板102的径向与第二支撑杆103重合;所述第二滚轮104安装在第二支撑杆103的一端,所述第二滚轮104顶靠在与之对应的叶片轮8的叶片根部;如图2所示,随着叶片轮8逆时针旋转,第二滚轮104沿叶片轮8的第二个叶片的叶片根部至叶片顶部的圆弧面运动并带动第二支撑杆103沿着第二套筒9轴线运动。
所述第三支撑杆组件14的结构与第一支撑杆组件7、第二支撑杆组件10完全相同,第三支撑杆组件14由第三支撑板141、第三弧形板142、第三支撑杆143以及第三滚轮144组成;所述第三支撑杆143穿过第三套筒16,所述第三支撑板141位于壳体1的内侧并垂直安装在第三支撑杆143上,所述第三弧形板142位于壳体1的外侧并与第三支撑杆143固定连接,且所述第三弧形板142的径向与第三支撑杆143重合;所述第三滚轮144安装在第三支撑杆143的一端,所述第三滚轮144顶靠在与之对应的叶片轮8的叶片根部;如图2所示,随着叶片轮8逆时针旋转,第三滚轮144沿叶片轮8的第三个叶片的叶片根部至叶片顶部的圆弧面运动并带动第三支撑杆143沿着第三套筒16轴线运动。
与第一套筒6、第二套筒9和第三套筒16相对应地,所述第一支撑杆组件7、第二支撑杆组件10与第三支撑杆组件14沿壳体1的圆周方向两两间隔120°的均匀分布。
所述第一弧形板72、第二弧形板102和第三弧形板142共圆,且与壳体1的横截面为同心圆。随着叶片轮8逆时针旋转,第一滚轮74、第二滚轮104和第三滚轮144同时分别沿着三个叶片的叶片根部至叶片顶部的圆弧面运动并分别带动第一支撑杆73、第二支撑杆103和第三支撑杆143沿径向运动,进而带动第一弧形板72、第二弧形板102和第三弧形板142同时向外运动,实现第一弧形板72、第二弧形板102和第三弧形板142所在的圆形放大。
所述第一支撑弹簧组5的两根第一支撑弹簧分别平行设置在第一支撑杆73的两侧,第一支撑弹簧的一端与第一支撑板71固定连接,第一支撑弹簧的另一端固定连接在壳体1的内侧壁上;所述第二支撑弹簧组11的两根第二支撑弹簧分别平行设置在第二支撑杆103的两侧,第二支撑弹簧的一端与第二支撑板101固定连接,第二支撑弹簧的另一端固定连接在壳体1的内侧壁上;所述第三支撑弹簧组15的两根第三支撑弹簧分别平行设置在第三支撑杆143的两侧,第三支撑弹簧的一端与第三支撑板141固定连接,第三支撑弹簧的另一端固定连接在壳体1的内侧壁上;
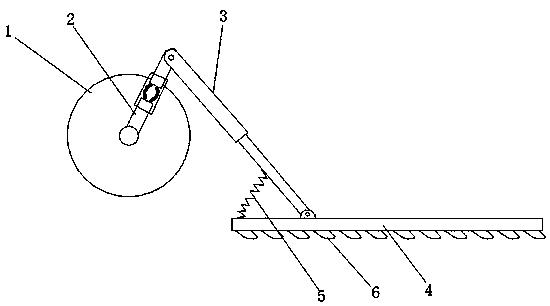
如图1所示,所述自锁装置由直线电机2、自锁弹簧3、棘爪4以及设置在叶片轮8上的棘轮齿组成。在所述叶片轮8的其中一个叶片的顶部外圆周表面上设有棘轮齿,所述直线电机通过安装架固定在壳体1上,所述棘爪4铰接在安装架上,棘爪4的与叶片轮8上的棘轮齿相匹配,所述自锁弹簧3固定连接在直线电机2的输出端与棘爪4之间;当直线电机2的输出端向外伸出,其通过自锁弹簧3将棘爪4顶靠在叶片轮8上的棘轮齿上,二者啮合实现自锁。
本实用新型所述轮式辅助越障装置的壳体1通过螺栓18同轴安装在车轮17的轮毂上,拆装十分方便。
本实用新型所述轮式辅助越障装置的工作过程具体如下:
1、轮式车辆在平坦路面上行驶时,轮式辅助越障装置不工作,通过车辆原有车轮17实现快速行驶。
2、当轮式车辆遇到障碍物时,本实用新型所述轮式辅助越障装置开始工作,启动驱动电机13,驱动电机13通过动力轴12驱动叶片轮8逆时针旋转,随着叶片轮8的转动,第一滚轮74、第二滚轮104和第三滚轮144同时分别沿着三个叶片的叶片根部至叶片顶部的圆弧面运动并分别带动第一支撑杆73、第二支撑杆103和第三支撑杆143沿径向运动,进而带动第一弧形板72、第二弧形板102和第三弧形板142同时向外延伸运动,延伸过程中,第一支撑弹簧组5、第二支撑弹簧组11和第三支撑弹簧组15均同时被压缩,当叶片轮8旋转至指定角度时,此时第一弧形板72、第二弧形板102和第三弧形板142所形成的圆环与车轮17同心,且第一弧形板72、第二弧形板102和第三弧形板142所在圆的半径大于车轮17的半径,与此同时,切断驱动电机1的动力,自锁机构中,在直线电机2与自锁弹簧的作用下,棘爪4与叶片轮8上的棘轮齿啮合使叶片轮8无法顺时针旋转,实现自锁;此时驱动车轮17旋转,使第一支撑组件7、第二支撑组件10以及第三支撑组件14在扩大与车轮17同圆心的轮式辅助越障装置的半径的同时,支撑起车轮17,完成轮式车辆越障;
待车辆越障完成后,自锁机构中,直线电机2向内收缩,并通过自锁弹簧3带动棘爪4抬起,与叶片轮8上的棘轮齿分离解锁,随后,启动驱动电机13反向运转,并通过动力轴12驱动叶片轮8顺时针旋转,第一滚轮74、第二滚轮104和第三滚轮144同时分别沿着三个叶片的叶片顶部向叶片根部的圆弧面运动,并在第一支撑弹簧组5、第二支撑弹簧组11和第三支撑弹簧组15欲恢复形变的作用力下带动第一支撑杆73、第二支撑杆103和第三支撑杆143沿径向运动,进而带动第一弧形板72、第二弧形板102和第三弧形板142同时向内收缩运动,恢复至初始位置,车辆恢复采用原有车轮行驶。
一种轮式辅助越障装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0