







专利摘要
一种全向移动平台的独立悬挂机构,包括两个左右对称设置的麦克纳姆轮,每个麦克纳姆轮内侧连接有驱动装置,麦克纳姆轮外侧安装架上连接有减震机构,减速机两侧布置弹簧导杆,弹簧导杆的顶部与车体安装板连接,底部与安装架连接,弹簧导杆中间套置第一矩形截面弹簧;两个麦克纳姆轮通过车体安装板、安装架、连接板形成一个封闭结构;本发明对基于麦克纳姆轮的全向移动平台,可实现多种不同环境工况下的使用下压力可根据负载及地面状况进行调节,可降低地面对麦克纳姆轮运行过程的影响程度,避免因地面不平产生的某组轮组悬空等现象,具有平台运行平稳性、越障能力强;承载能力大的优点。
权利要求
1.一种全向移动平台的独立悬挂机构,包括两个左右对称设置的麦克纳姆轮(6),其特征在于:每个麦克纳姆轮(6)内侧连接有驱动装置,驱动装置包括电机(2),电机(2)的输出轴和减速机(4)的输入轴连接,减速机(4)的输出轴穿过减速机连接法兰(5)和深沟球轴承(17)与麦克纳姆轮(6)固连,减速机连接法兰(5)通过深沟球轴承(17)连接于麦克纳姆轮(6)的轮毂内侧,电机(2)外壳和减速机(4)外壳固连,减速机(4)外壳与减速机连接法兰(5)固定,减速机连接法兰(5)上装有第一支撑座(19),第一支撑座(19)和安装架(15)的一端连接;
麦克纳姆轮(6)的外侧通过深沟球轴承连接有外连接法兰(7),外连接法兰(7)上装有第二支撑座(13),第二支撑座(13)与安装架(15)的另一端连接,麦克纳姆轮(6)外侧安装架(15)上连接有减震机构,减振机构的下连接件(12)通过轴承安装在减振安装轴(18)上,减振安装轴(18)通过减振固定座(9)连接在安装架(15)上,减震机构的上端以相同方式通过上连接件(8)固定于车体安装板(1)上;
减速机(4)两侧布置弹簧导杆(14),弹簧导杆(14)的顶部与车体安装板(1)连接,底部与安装架(15)连接,弹簧导杆(14)中间套置第一矩形截面弹簧(3);
两侧的安装架(15)之间通过连接板(16)连接,两个麦克纳姆轮(6)通过车体安装板(1)、安装架(15)、连接板(16)形成一个封闭结构。
2.根据权利要求1所述的一种全向移动平台的独立悬挂机构,其特征在于:所述的减震机构由上连接件(8)、下连接件(12)、紧固件(10)、第二矩形截面弹簧(11)组成,下连接件(12)装于上连接件(8)内,受力后下连接件(12)能够在上连接件(8)内部运动,下连接件(12)外表面设有第二矩形截面弹簧(11),下连接件(12)外表面通过螺栓固定有紧固件(10),紧固件(10)和第二矩形截面弹簧(11)上端接触,使第二矩形截面弹簧(11)根据承力情况自行调节高度。
说明书
技术领域
本发明涉及了麦克纳姆轮移动平台技术领域,具体涉及一种全向移动平台的独立悬挂机构。
背景技术
目前,麦克纳姆轮在全向智能移动装备领域得到广泛的应用,但是,其全向移动装备必须在平稳的地面才能按照预定轨迹运行。因此,麦克纳姆轮移动平台对路面平整度要求很高,道路稍有不平整很容易造成运行时重心不稳,导致较大晃动,会使移动平台运行不稳定。当路面的平整度不好,其四个轮不能同时着地时,移动平台不能实现很好的全向运动,也就不能很好的发挥其优势。
现有麦克纳姆轮的压力不能根据负载及地面状况进行调节,平台运行平稳性、越障能力差。
发明内容
为克服上述现有技术的不足,本发明的目的在于提供了一种全向移动平台的独立悬挂机构,具有平台运行平稳性、越障能力强;承载能力大的优点。
为了达到上述目的,本发明采取的技术方案是这样实现的:
一种全向移动平台的独立悬挂机构,包括两个左右对称设置的麦克纳姆轮6,每个麦克纳姆轮6内侧连接有驱动装置,驱动装置包括电机2,电机2的输出轴和减速机4的输入轴连接,减速机4的输出轴穿过减速机连接法兰5和深沟球轴承17与麦克纳姆轮6固连,减速机连接法兰5通过深沟球轴承17连接于麦克纳姆轮6的轮毂内侧,电机2外壳和减速机4外壳固连,减速机4外壳与减速机连接法兰5固定,减速机连接法兰5上装有第一支撑座19,第一支撑座19和安装架15的一端连接;
麦克纳姆轮6的外侧通过深沟球轴承连接有外连接法兰7,外连接法兰7上装有第二支撑座13,第二支撑座13与安装架15的另一端连接,麦克纳姆轮6外侧安装架15上连接有减震机构,减振机构的下连接件12通过轴承安装在减振安装轴18上,减振安装轴18通过减振固定座9连接在安装架15上,减震机构的上端以相同方式通过上连接件8固定于车体安装板1上;
减速机4两侧布置弹簧导杆14,弹簧导杆14的顶部与车体安装板1连接,底部与安装架15连接,弹簧导杆14中间套置第一矩形截面弹簧3;
两侧的安装架15之间通过连接板16连接,两个麦克纳姆轮6通过车体安装板1、安装架15、连接板16形成一个封闭结构。
所述的减震机构由上连接件8、下连接件12、紧固件10、第二矩形截面弹簧11组成,下连接件12装于上连接件8内,受力后下连接件12能够在上连接件8内部运动,下连接件12外表面设有第二矩形截面弹簧11,下连接件12外表面通过螺栓固定有紧固件10,紧固件10和第二矩形截面弹簧11上端接触,使第二矩形截面弹簧11根据承力情况自行调节高度。
本发明具有以下优点:
1.本发明采用减震机构和矩形弹簧(11)来调整使用麦克纳姆轮的移动平台高度,从而时刻保证麦克纳姆轮(6)都可以与地面充分接触,使得所有的麦克纳姆轮(6)受力均匀,确保运行的平稳。
2.本发明的过渡轴组件(减速机连接法兰(5)、外连接法兰(7))采用法兰式连接结构可以提供较大的输出扭矩,确保动力系统的输出端与麦克纳姆轮(6)可靠连接。
3.本发明对减震机构和导向杆上弹簧(3)均使用矩形截面弹簧,即使弹簧在小变形量下,平台也具有在大载重下克服不平整路面的能力,可以让麦克纳姆轮(6)更好的适应地面的不平整性。
4.本发明采用减震机构和矩形弹簧可自适应调整麦克纳姆轮离地高度,对不平整地形较强的适应能力和一定的越障能力,平台承载刚性好,越障能力强。
与现有技术相比较,本发明提供的可独立自适应下压的麦克纳姆轮,对基于麦克纳姆轮的全向移动平台,可实现多种不同环境工况下的使用下压力可根据负载及地面状况进行调节,可降低地面对麦克纳姆轮运行过程的影响程度,避免因地面不平产生的某组轮组悬空等现象。
附图说明
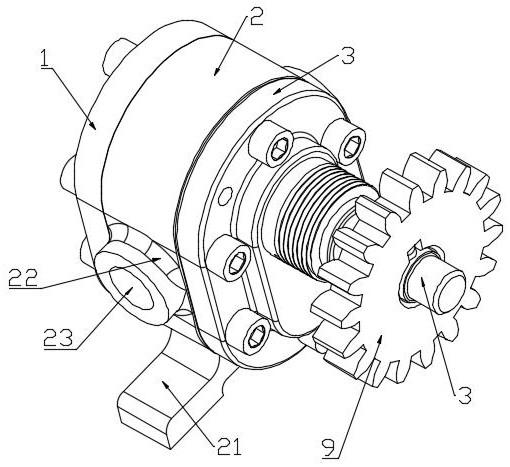
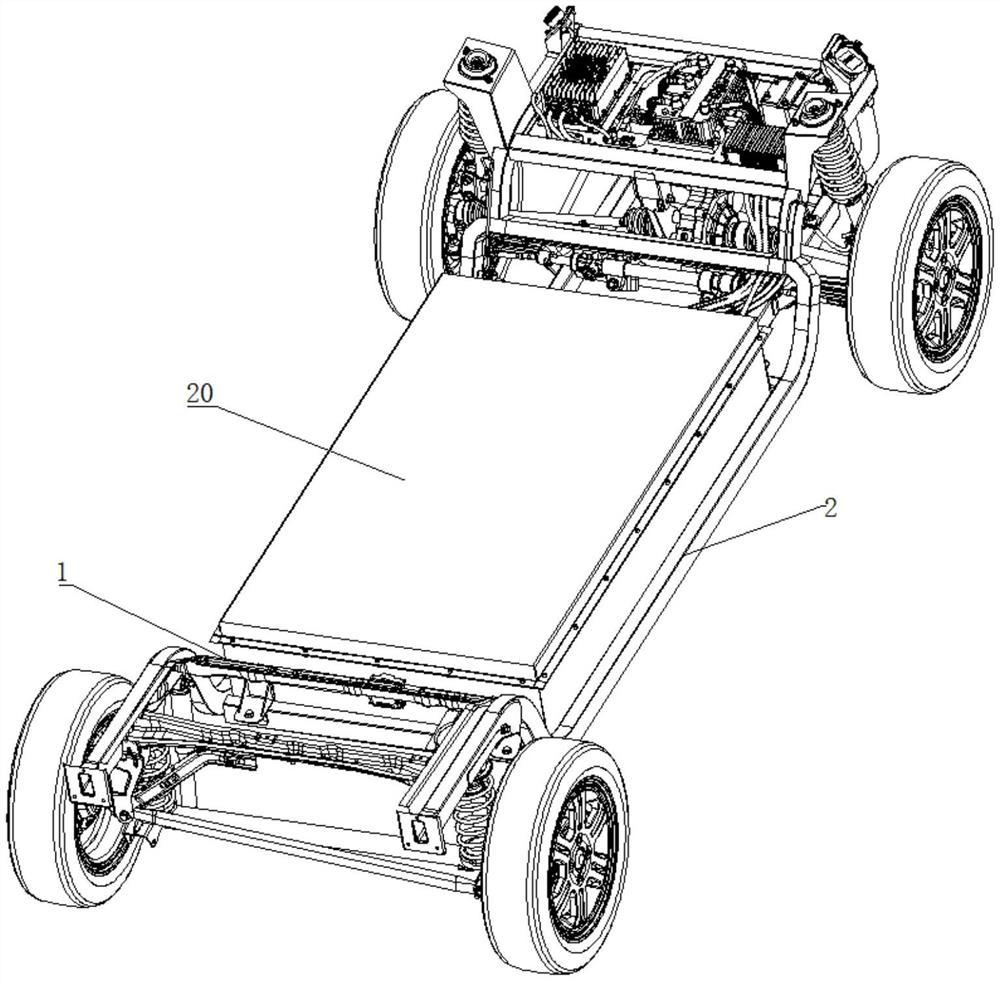
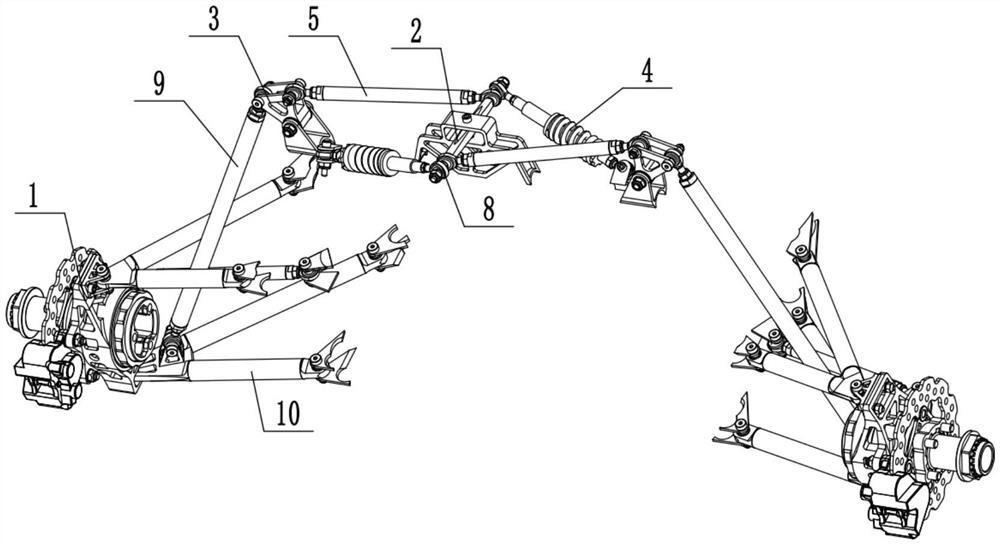
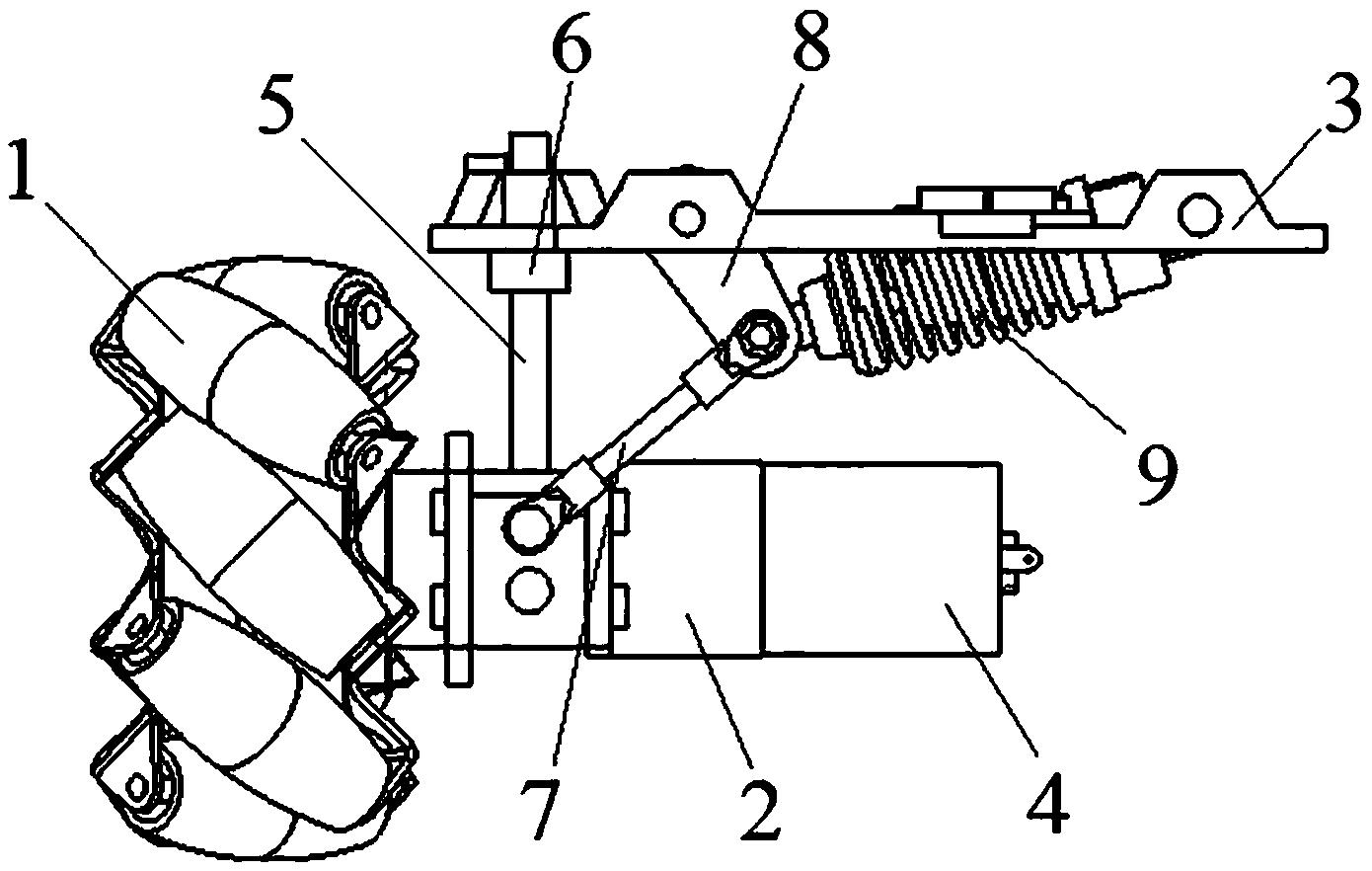
图1是本发明的立体结构示意图。
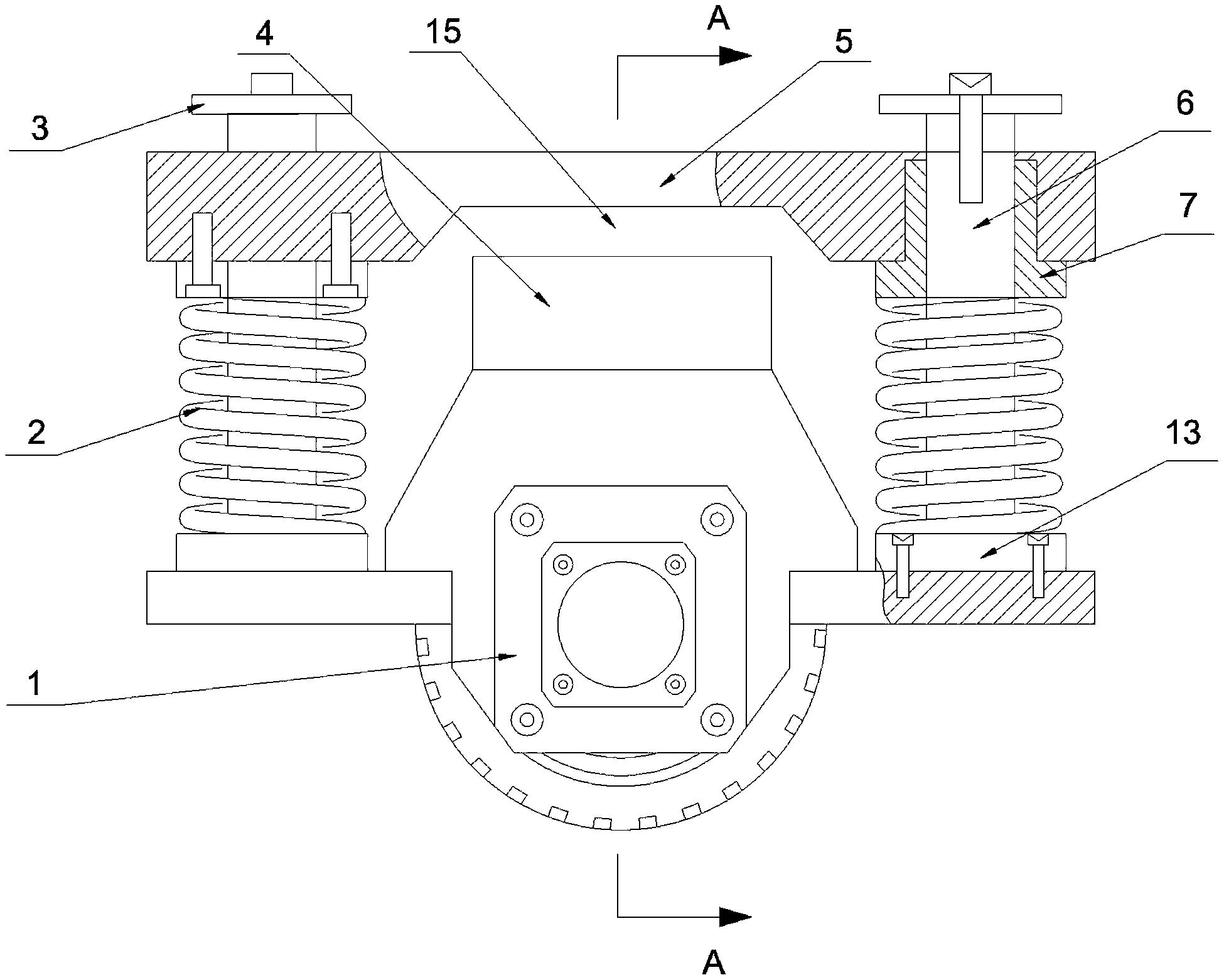
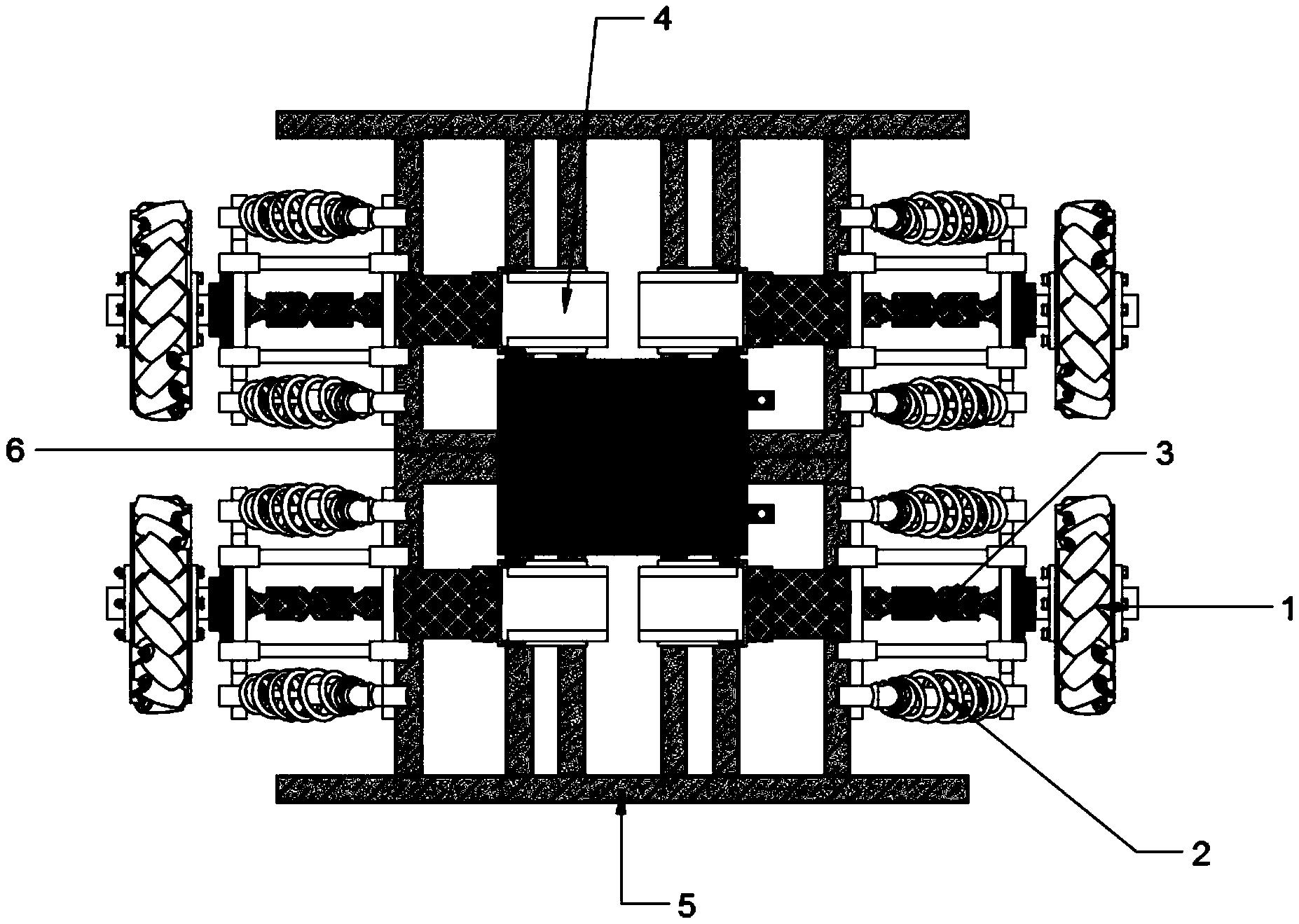
图2是本发明的主视图。
图3是本发明的左视图。
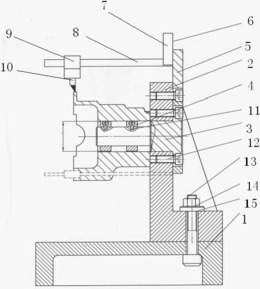
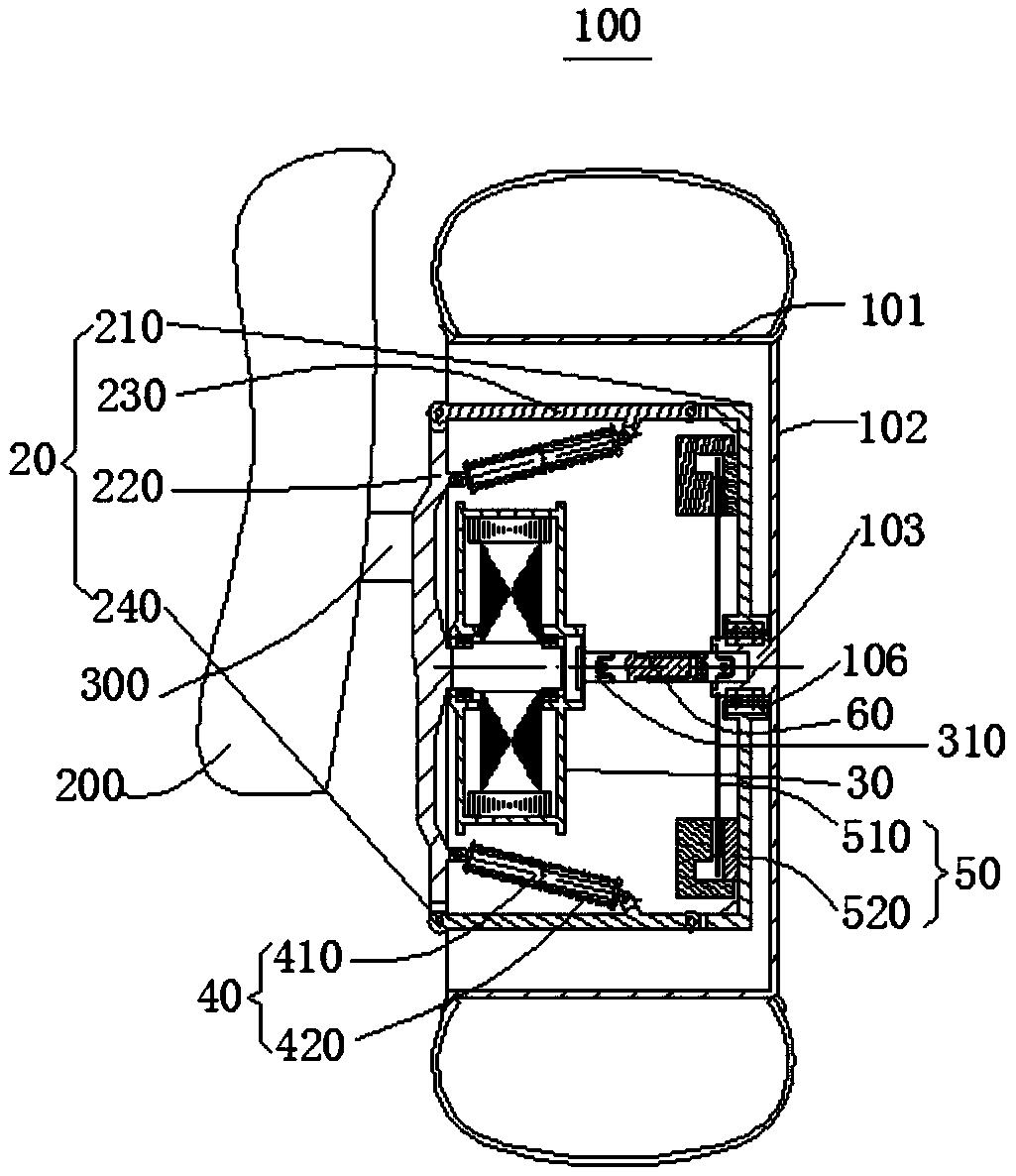
图4是图3的A-A剖视图。
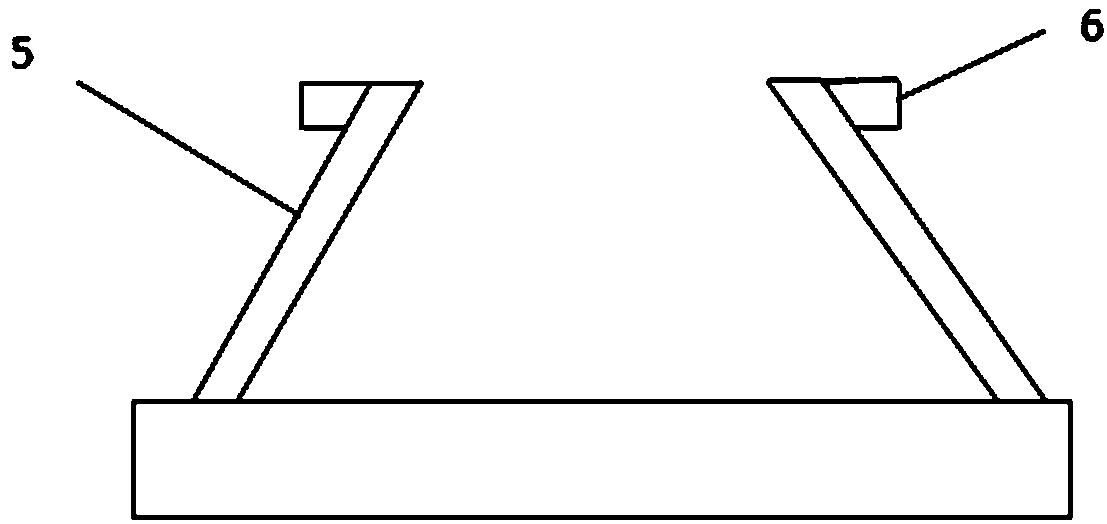
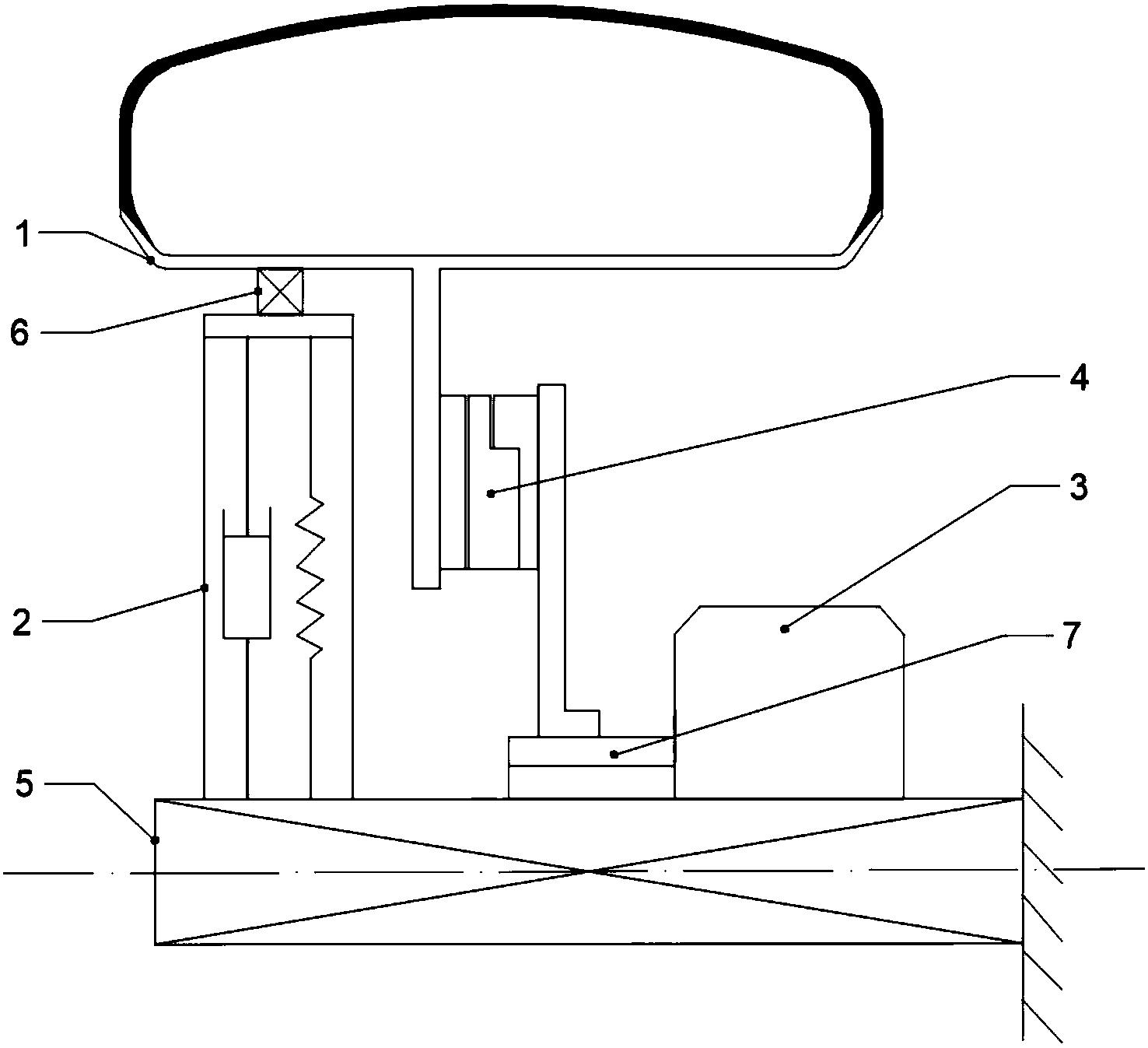
图5是本发明减震机构的局部放大图。
图6是本发明减振机构的立体示意图。
具体实施方式
下面结合附图对本发明作详细描述。
参照图1、图2、图3和图4,一种全向移动平台的独立悬挂机构,包括两个左右对称设置的麦克纳姆轮6,每个麦克纳姆轮6内侧连接有驱动装置,驱动装置包括电机2,电机2的输出轴和减速机4的输入轴连接,减速机4的输出轴穿过减速机连接法兰5和深沟球轴承17与麦克纳姆轮6通过键固连,减速机连接法兰5通过深沟球轴承17连接于麦克纳姆轮6的轮毂内侧,驱动装置驱动对应麦克纳姆轮6运动,同时减速机4实现对速度的控制;电机2外壳和减速机4外壳固连,减速机4外壳与减速机连接法兰5固定,减速机连接法兰5上装有第一支撑座19,第一支撑座19通过螺栓和安装架15的一端连接;
麦克纳姆轮6的外侧通过深沟球轴承连接有外连接法兰7,外连接法兰7上装有第二支撑座13,第二支撑座13与安装架15的另一端连接,麦克纳姆轮6外侧安装架15上连接有减震机构,减振机构包括下连接件12,下连接件12通过轴承安装在减振安装轴18上,减振安装轴18通过减振固定座9并由锁紧螺母连接在安装架15上,减震机构的上端以相同方式通过上连接件8固定于车体安装板1上;
减速机4两侧布置弹簧导杆14,弹簧导杆14的顶部通过螺栓与车体安装板1连接,底部通过锁紧螺母与安装架15连接,弹簧导杆14中间套置第一矩形截面弹簧3,为减振机构起导向和辅助减振的作用,以保证减振机构能良好运行;
两侧的安装架15之间通过连接板16连接,两个麦克纳姆轮6通过车体安装板1、安装架15、连接板16形成一个封闭结构。
参照图5和图6,所述的减震机构由上连接件8、下连接件12、紧固件10、第二矩形截面弹簧11组成,下连接件12装于上连接件8内,受力后下连接件12能够在上连接件8内部运动,下连接件12外表面设有第二矩形截面弹簧11,下连接件12外表面通过螺栓固定有紧固件10,紧固件10和第二矩形截面弹簧11上端接触,使第二矩形截面弹簧11根据承力情况自行调节高度,保证移动平台的稳定运行。
本发明的工作原理为:
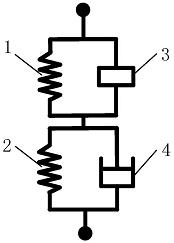
在使用中,平台负载的重量通过车体安装板1传入悬挂机构中,进而传递给减振机构和弹簧导杆14,在减震机构中下连接件12会在上连接件8中向上运动,从而压缩第二矩形截面弹簧11;此时弹簧导杆14也会因为受力向下运动从而压缩第一矩形截面弹簧3,即可抵消平台载重使麦克纳姆轮6产生受力不均所出现的运行不稳定。
而当地面不平整时,地面的凹凸也会使麦克纳姆轮6受力不均,此时不均匀的受力通过麦克纳姆轮6传入悬挂系统中,从而不均匀的受力通过深沟球轴承17、外连接法兰7和减速机连接法兰5传递给第一支撑座19、第二支撑座13,进而传递至安装架15和连接板16,最终到达减震机构和弹簧导杆14,压缩第一矩形截面弹簧3、第二矩形截面弹簧11,对不均匀受力的抵消。
第一矩形截面弹簧3和第二矩形截面弹簧11的伸长压缩在竖直方向上调整中心高度,使麦克纳姆轮6与地面一直处于接触状态。第一矩形截面弹簧3和第二矩形截面弹簧11可以自适应的保持力的平衡,根据力情况上下浮动自主调节高度,除此之外第一矩形截面弹簧3和弹簧导杆14还可以起到对减振机构中第二矩形截面弹簧11的导向作用从而达到移动平台平稳运行的要求。
一种全向移动平台的独立悬挂机构专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0