









专利摘要
本实用新型涉及舱载潜体释放装置,特别是一种舱载潜体全液压水平释放装置。底座为门型框架结构,其闭口一端垂直安装有支撑门架,支撑门架顶部通过后导轮安装座活动安装有后导轮;本实用新型的有益效果是:1.通过两次平移,三次翻转,实现了舱内有限空间存放潜体的水平释放;2.提出了均采用曲柄摇杆机构的两级翻转结构,通过两级翻转保证翻转角度,降低了单次翻转船舱空间限制;3.采用能摆动的夹钳一点夹持和缆绳一点吊控保证潜体的水平姿态,实现潜体水平姿态收放;4.提出了采用剪形结构实现有限空间同步夹紧放松,利用油缸驱动平衡梁带动剪形夹紧机构上移的可摆动U型夹钳,保证了潜体收放工作的可靠性。
权利要求
1.一种舱载潜体全液压水平释放装置,其特征在于:底座(1)为冂型框架结构,其闭口一端垂直安装有支撑门架(2),支撑门架(2)顶部通过后导轮安装座(3)活动安装有后导轮(4);
所述的底座(1)两侧框架之间活动安装有导向架(6),导向架前端与支撑梁(14)活动连接;导向架(6)两侧梁上安装有四对车轮(24),其中一个车轮(24)连接有带刹车的马达减速机(22),导向架(6)通过马达减速机(22)驱动车轮(24)实现其在底座(1)框架内平移;
所述的导向架(6)后端安装有一对倾转油缸安装座A(7),倾转油缸安装座A(7)上安装有一倾转油缸(8),倾转油缸(8)另一端与7字形托架(9)的倾转油缸安装座B(23)连接,7字形托架(9)与导向架(6)活动连接,形成一个曲柄摇杆机构,由倾转油缸(8)驱动实现7字形托架(9)的摆动;
所述的7字形托架(9),其两侧端部分别设有一翻转油缸安装座A(10),翻转油缸安装座A(10)通过销轴与翻转油缸(11)连接,翻转油缸(11)另一端与支撑梁(14)的中下段活动连接,形成一个曲柄摇杆机构,由翻转油缸(11)驱动实现支撑梁(14)的摆动;
所述的支撑梁(14)与底座(1)活动连接,其顶部通过前导轮安装座(13)安装有前导轮(12),支撑梁(14)上部横梁下方设有夹钳安装座(15),夹钳安装座(15)与夹钳(16)活动连接;
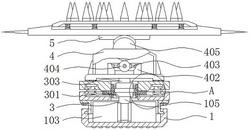
所述的夹钳(16)包括U型夹钳支撑体(161),U型夹钳支撑体(161)两端分别设有一导块(164),导块(164)在U型夹钳支撑体(161)两侧臂内的导轨槽移动,两个导块(164)之间水平安装有平衡梁(163),导块(164)底部与竖移油缸(166)一端活动连接,竖移油缸(166)另一端通过销轴固定在U型夹钳支撑体(161)两侧臂内,由竖移油缸(166)驱动平衡梁(163)上下移动;
所述平衡梁(163)中间通过连接柱销(162)分别与左剪夹臂(165)和右剪夹臂(167)活动连接,夹紧油缸(169)两端分别与左剪夹臂(165)及右剪夹臂(167)上部活动连接;由夹紧油缸(169)驱动左剪夹臂(165)及右剪夹臂(167)实现夹紧和放松动作;
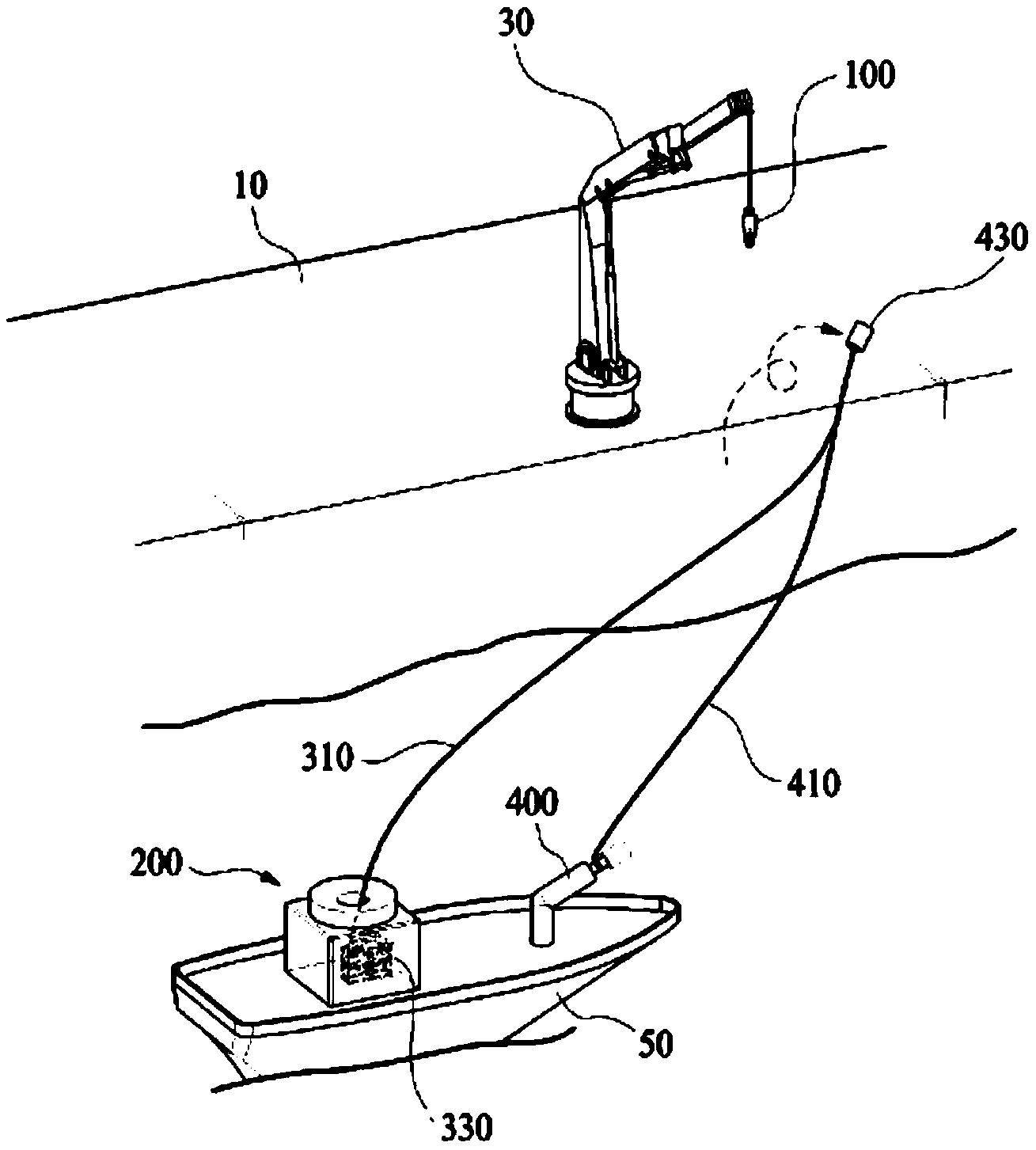
所述的夹钳(16)夹持在潜体(18)的前端,潜体(18)后端顶部设有起吊耳(17),起吊耳(17)连接有缆绳(5),缆绳(5)绕过前导轮(12)和后导轮(4)后连接收放绞车。
2.如权利要求1所述的舱载潜体全液压水平释放装置,其特征在于:所述的倾转油缸(8)、翻转油缸(11)、竖移油缸(166)、夹紧油缸(169)由油泵(26)驱动,受控制器(170)连接的阀门控制。
3.如权利要求1所述的舱载潜体全液压水平释放装置,其特征在于:所述底座(1)与支撑梁(14)之间安装有45°判别接近开关(20);所述支撑梁(14)与底座(1)连接销孔下方设有水平判别接近开关(19)。
4.如权利要求1或2或3所述的舱载潜体全液压水平释放装置,其特征在于:倾转油缸(8)无杆腔与平衡阀(29)的B口连接,平衡阀(29)的A口与倾转电磁换向阀(28)的B口连接,倾转电磁换向阀(28)的A口与倾转油缸(8)有杆腔连接,P口与油泵(26)出口连接;所述的油泵(26)出口同时与电磁溢流阀(27)的P口、翻转电磁换向阀(30)的P口、平移电磁换向阀(31)的P口、夹紧电磁换向阀(32)的P口、竖移电磁换向阀(34)的P口和压力传感器(35)连接,电磁溢流阀(27)的T口与翻转电磁换向阀(30)的T口、平移电磁换向阀(31)的T口、夹紧电磁换向阀(32)的T口和竖移电磁换向阀(34)的T口相连,与油箱接通;所述电磁溢流阀(27)、翻转电磁换向阀(30)、平移电磁换向阀(31)、夹紧电磁换向阀(32)、竖移电磁换向阀(34)的电磁铁与控制器(170)的输出端连接,控制器(170)输入端与压力传感器(35)信号输出端、水平判别接近开关(19)和45°判别接近开关(20)连接;
翻转电磁换向阀(30)的A口与翻转油缸(11)无杆腔连接,翻转油缸(11)有杆腔与平衡阀(29)的B口连接,平衡阀(29)的A口与翻转电磁换向阀(30)的B口连接;所述的平移电磁换向阀(31)的A口与马达减速机(22)的一端连接,马达减速机(22)的另一端与平移电磁换向阀(31)的B口连接,马达减速机(22)上安装有编码器(36),编码器(36)的信号输出端与控制器(170)的输入端连接;所述的夹紧电磁换向阀(32)的A口与单向减压阀(33)的A口连接,单向减压阀(33)的B口与夹紧油缸(169)的有杆腔连接,夹紧油缸(169)的无杆腔与夹紧电磁换向阀(32)的B口连接;所述的竖移电磁换向阀(34)的A口与竖移油缸(166)有杆腔连接,竖移油缸(166)有杆腔与平衡阀(29)的B口连接,平衡阀(29)的A口与竖移电磁换向阀(34)的B口连接。
5.如权利要求1所述的舱载潜体全液压水平释放装置,其特征在于:底座(1)前端两侧分别布置有销孔,用于通过插销(21)固定平移后导向架(6)。
6.如权利要求1所述的舱载潜体全液压水平释放装置,其特征在于:支撑梁(14)上部梁侧面设有夹钳限位板(25)。
7.如权利要求1所述的舱载潜体全液压水平释放装置,其特征在于:左剪夹臂(165)和右剪夹臂(167)的下部均安装有可更换的耐磨夹体(168)。
说明书
技术领域
本实用新型涉及舱载潜体释放装置,特别是一种舱载潜体全液压水平释放装置。
背景技术
舱载潜体是用来进行海底观测,海洋资源探测,海底工程地质调查的技术装备,收放装置是舱载潜体实现其水下作业的重要配套设备。可靠的收放装置能够突破有限船舱空间限制并使潜体水平姿态下放,特别是对于船舱仓高不超过2.5m的船而言,设计可靠的收放装置不可忽略。
ZL201410143558.5公开了一种海底钻机收放装置,支撑结构固定在母船后甲板上,钻机托架铰接在支撑机构中的油缸支撑底座上,两根收放油缸分别与两平行油缸支撑底座铰接,钻机托架可在收放油缸驱动下实现90°转动。该机构结构简单,操作方便,但所占空间大,对安装空间有一定要求,装置收放必须经历90°翻转过程。
ZL201510829448.9公开了一种波浪滑翔器收放装置,在母船上安装有支架,第一对支撑柱分别通过锁扣与两根轨道连接,两根轨道的中间位置分别和第二对支撑柱铰接连接,两根导轨的一端通过V型连接结构连接、另一端通过 U型连接结构连接,底部拐弯处设有定滑轮,每根导轨均匀设置有滚轮,通过母船上设置的承力柱连接倒链,倒链的端部连接牵引绳,牵引绳端部与浮体固连,浮体下端设置有脐带固定机构。该机构使用简单,能实现装置由船内至海面的水平收放,但必须通过吊放才能将装置至于水中,复杂海况下收放能力弱,安全可靠性不强。
现有收放技术无法保证装置在复杂海况下从船上水平姿态放置水下一定深度。潜体由于内部设置了许多用于探测的科考仪器与装置,且其作业海况复杂,为保证其工作安全性和可靠型,其下放海底过程必须保持水平姿态,下放深度保证潜体侵入水面一定深。适应舱载潜体在复杂海况下的收放装置与实现方法有待突破。
实用新型内容
本实用新型的目的在于提供一种舱载潜体全液压水平释放装置。
本实用新型的目的是通过如下途径实现的:一种舱载潜体全液压水平释放装置,底座为冂型框架结构,其闭口一端垂直安装有支撑门架,支撑门架顶部通过后导轮安装座活动安装有后导轮;
所述的底座两侧框架之间活动安装有导向架,导向架前端与支撑梁活动连接;导向架两侧梁上安装有四对车轮,其中一个车轮连接有带刹车的马达减速机,导向架通过马达减速机驱动车轮实现其在底座框架内平移;
所述的导向架后端安装有一对倾转油缸安装座A,倾转油缸安装座A上分别有安装有一倾转油缸,倾转油缸另一端与7字形托架的倾转油缸安装座B连接,7字形托架与导向架活动连接,形成一个曲柄摇杆机构,由倾转油缸驱动实现7字形托架的摆动;
所述的7字形托架,其两侧端部分别设有一翻转油缸安装座A,翻转油缸安装座A通过销轴与翻转油缸连接,翻转油缸另一端与支撑梁的中下段活动连接,形成一个曲柄摇杆机构,由翻转油缸驱动实现支撑梁的摆动;
所述的支撑梁与底座活动连接,其顶部通过前导轮安装座安装有前导轮,支撑梁上部横梁下方设有夹钳安装座,夹钳安装座与夹钳活动连接;
所述的夹钳包括U型夹钳支撑体,U型夹钳支撑体两端分别设有一导块,导块在U型夹钳支撑体两侧臂内的导轨槽移动,两个导块之间水平安装有平衡梁,导块底部与竖移油缸一端活动连接,竖移油缸另一端通过销轴固定在U型夹钳支撑体两侧臂内,由竖移油缸驱动平衡梁上下移动;
所述平衡梁中间通过连接柱销分别与左剪夹臂和右剪夹臂活动连接,夹紧油缸两端分别与左剪夹臂及右剪夹臂上部活动连接;由夹紧油缸驱动左剪夹臂及右剪夹臂实现夹紧和放松动作;
所述的夹钳夹持在潜体的前端,潜体后端顶部设有起吊耳,起吊耳连接有缆绳,缆绳绕过前导轮和后导轮后连接收放绞车。
作为本方案的进一步优化,所述的倾转油缸、翻转油缸、竖移油缸、夹紧油缸由油泵驱动,受控制器连接的阀门控制。
作为本方案的进一步优化,所述底座与支撑梁之间安装有45°判别接近开关;所述支撑梁与底座连接销孔下方设有水平判别接近开关。
作为本方案的进一步优化,倾转油缸无杆腔与平衡阀的B口连接,平衡阀的A口与倾转电磁换向阀的B口连接,倾转电磁换向阀的A口与倾转油缸有杆腔连接,P口与油泵出口连接;所述的油泵出口同时与电磁溢流阀的P口、翻转电磁换向阀的P口、平移电磁换向阀的P口、夹紧电磁换向阀的P口、竖移电磁换向阀的P口和压力传感器连接,电磁溢流阀的T口与翻转电磁换向阀的 T口、平移电磁换向阀的T口、夹紧电磁换向阀的T口和竖移电磁换向阀的T 口相连,与油箱接通。所述电磁溢流阀、翻转电磁换向阀、平移电磁换向阀、夹紧电磁换向阀、竖移电磁换向阀的电磁铁与控制器的输出端连接,控制器输入端与压力传感器信号输出端、水平判别接近开关和45°判别接近开关连接;
翻转电磁换向阀的A口与翻转油缸无杆腔连接,翻转油缸有杆腔与平衡阀的B口连接,平衡阀的A口与翻转电磁换向阀的B口连接;所述的平移电磁换向阀的A口与马达减速机的一端连接,马达减速机的另一端与平移电磁换向阀的B口连接,马达减速机上安装有编码器,编码器的信号输出端与控制器的输入端连接;所述的夹紧电磁换向阀的A口与单向减压阀的A口连接,单向减压阀的B口与夹紧油缸的有杆腔连接,夹紧油缸的无杆腔与夹紧电磁换向阀的B 口连接;所述的竖移电磁换向阀的A口与竖移油缸有杆腔连接,竖移油缸有杆腔与平衡阀的B口连接,平衡阀的A口与竖移电磁换向阀的B口连接。
作为本方案的进一步优化,底座前端两侧分别布置有销孔,用于通过插销固定平移后导向架。
作为本方案的进一步优化,支撑梁上部梁侧面设有夹钳限位板。
作为本方案的进一步优化,左剪夹臂和右剪夹臂的下部均安装有可更换的耐磨夹体。
本实用新型舱载潜体全液压水平释放装置,与现有的技术相比,本实用新型的有益效果是:
1.通过两次平移,三次翻转,实现了舱内有限空间存放潜体的水平释放;
2.提出了均采用曲柄摇杆机构的两级翻转结构,通过两级翻转保证翻转角度,降低了单次翻转船舱空间限制;
3.采用能摆动的夹钳一点夹持和缆绳一点吊控保证潜体的水平姿态,实现潜体水平姿态收放;
4.提出了采用剪形结构实现有限空间同步夹紧放松,利用油缸驱动平衡梁带动剪形夹紧机构上移的可摆动U型夹钳,保证了潜体收放工作的可靠性。
附图说明
下面结合附图对本实用新型作进一步详细说明:
图1为本实用新型整体结构立体示意图;
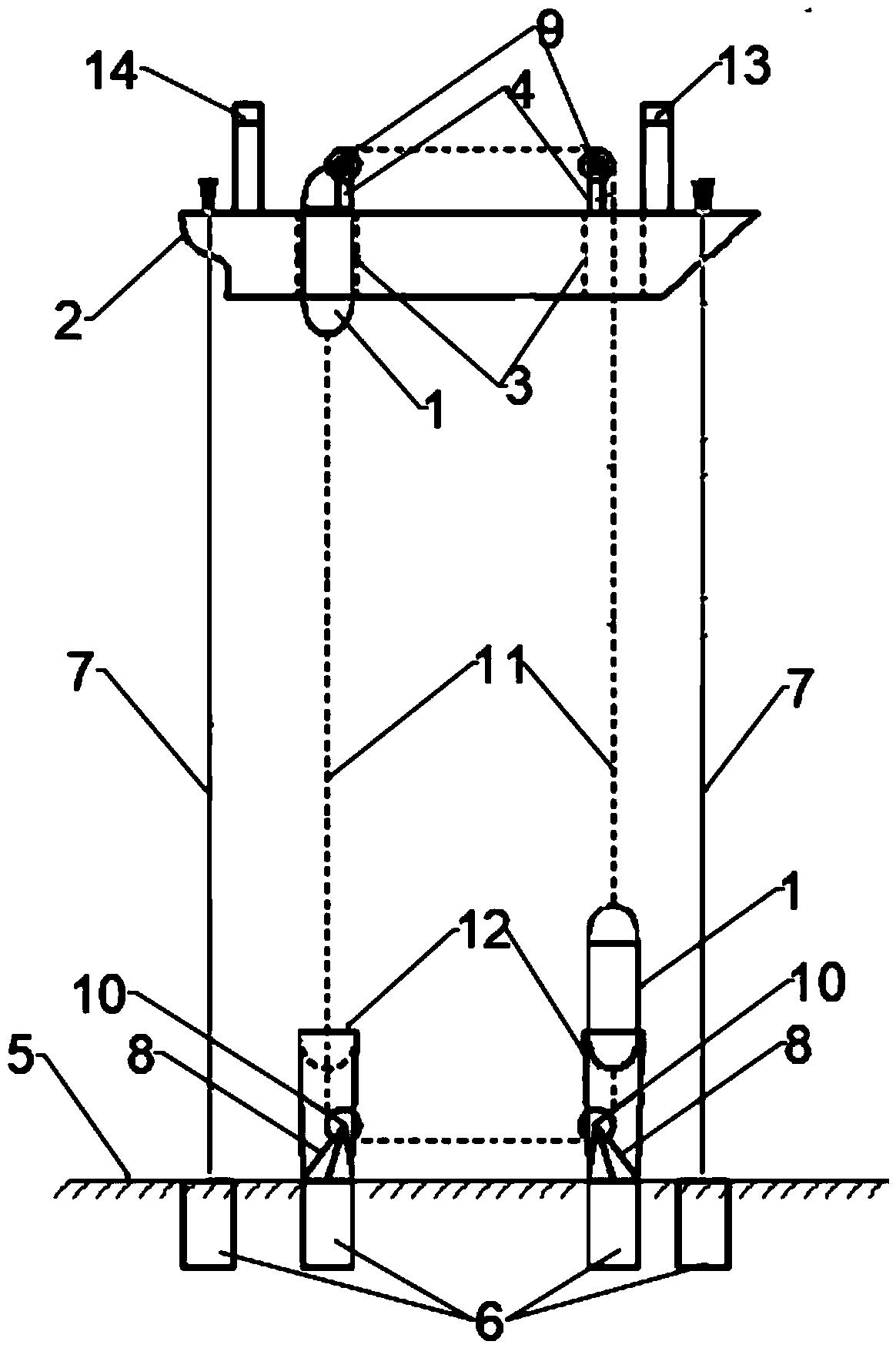
图2为本实用新型整体结构侧视示意图;
图3为本实用新型整体结构俯视示意图;
图4为本实用新型中夹钳结构立体示意图;
图5为本实用新型中夹钳结构透视示意图;
图6为本实用新型中夹钳结构侧视示意图;
图7为本实用新型工作状态示意图;
图8为本实用新型的液压、电控结构示意图;
图9为本实用新型中7字形托架结构示意图。
具体实施方式
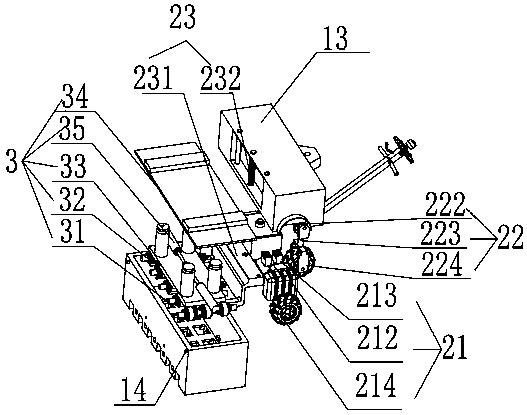
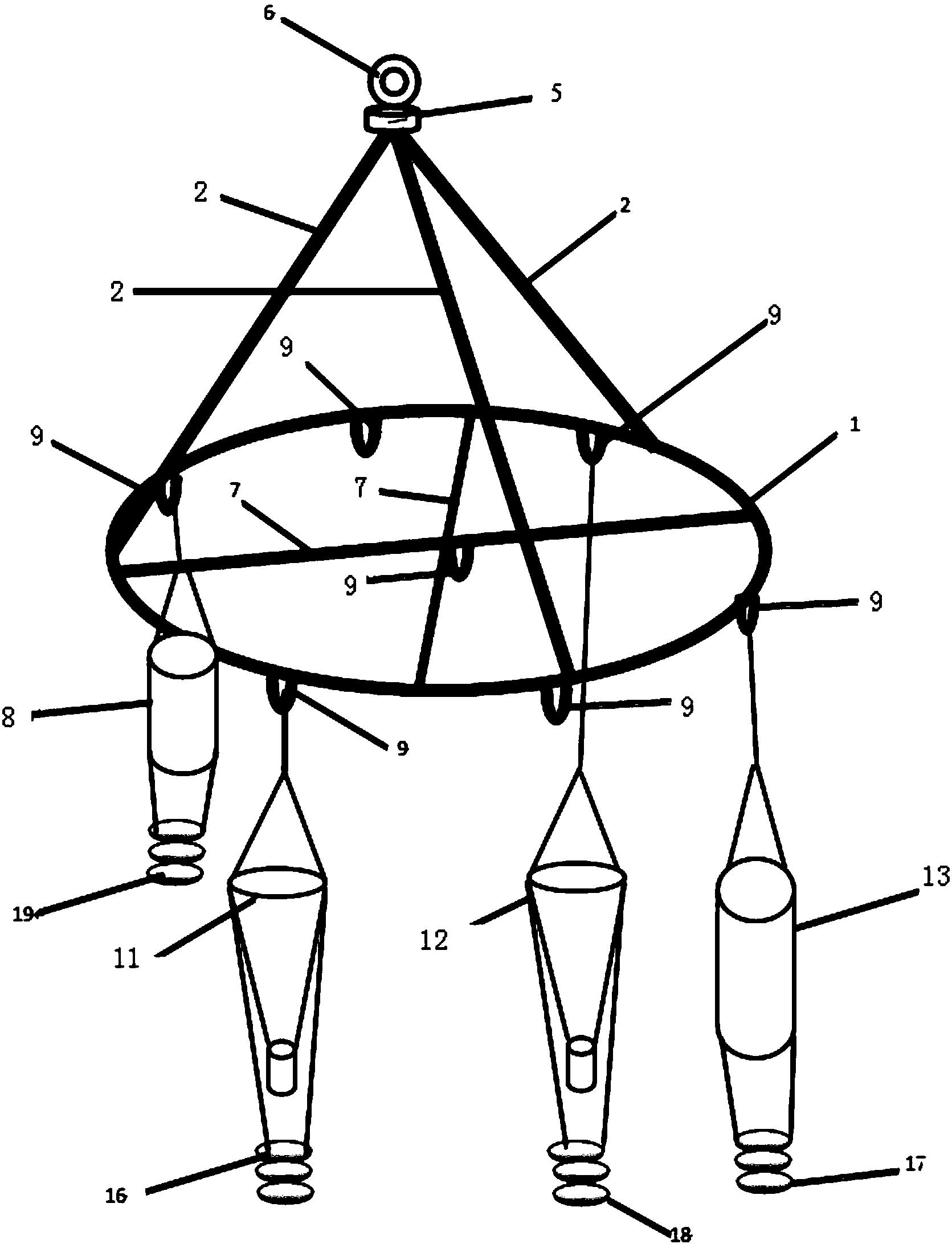
如图1、图2、图3所示,本实用新型舱载潜体全液压水平释放装置,底座1 为冂型框架结构,其闭口一端垂直安装有支撑门架2,支撑门架2顶部通过后导轮安装座3活动安装有后导轮4;
所述的底座1两侧框架之间活动安装有导向架6,导向架前端与支撑梁14 活动连接;导向架6两侧梁上安装有四对车轮24,其中一个车轮24连接有带刹车的马达减速机22,导向架6通过马达减速机22驱动车轮24实现其在底座 1框架内平移;
所述的导向架6后端安装有一对倾转油缸安装座A7,倾转油缸安装座A7 上安装有倾转油缸8,倾转油缸8另一端与7字形托架9(其结构如图9所示,) 的倾转油缸安装座B23连接,7字形托架9与导向架6活动连接,形成一个曲柄摇杆机构,由倾转油缸8驱动实现7字形托架9的摆动;
所述的7字形托架9,其两侧端部分别设有一翻转油缸安装座A10,翻转油缸安装座A10通过销轴与翻转油缸11连接,翻转油缸11另一端与支撑梁14 的中下段活动连接,形成一个曲柄摇杆机构,由翻转油缸11驱动实现支撑梁 14的摆动;
所述的支撑梁14与底座1活动连接,其顶部通过前导轮安装座13安装有前导轮12,支撑梁14上部横梁下方设有夹钳安装座15,夹钳安装座15与夹钳16活动连接;
如图4、图5、图6所示,所述的夹钳16包括U型夹钳支撑体161,U型夹钳支撑体161两端分别设有一导块164,导块164在U型夹钳支撑体161两侧臂内的导轨槽移动,两个导块164之间水平安装有平衡梁163,导块164底部与竖移油缸166一端活动连接,竖移油缸166另一端通过销轴固定在U型夹钳支撑体161两侧臂内,由竖移油缸166驱动平衡梁163上下移动;
所述平衡梁163中间通过连接柱销162分别与左剪夹臂165和右剪夹臂 167活动连接,夹紧油缸169两端分别与左剪夹臂165及右剪夹臂167上部活动连接;由夹紧油缸169驱动左剪夹臂165及右剪夹臂167实现夹紧和放松动作;
所述的夹钳16夹持在潜体18的前端,潜体18后端顶部设有起吊耳17,起吊耳17连接有缆绳5,缆绳5绕过前导轮12和后导轮4后连接收放绞车。
所述的倾转油缸8、翻转油缸11、竖移油缸166、夹紧油缸169由油泵26 驱动,受控制器170连接的阀门控制。
所述底座1与支撑梁14之间安装有45°判别接近开关20;所述支撑梁14 与底座1连接销孔下方设有水平判别接近开关19。
如图8所示,倾转油缸8无杆腔与平衡阀29的B口连接,平衡阀29的A 口与倾转电磁换向阀28的B口连接,倾转电磁换向阀28的A口与倾转油缸8 有杆腔连接,P口与油泵26出口连接;所述的油泵26出口同时与电磁溢流阀27的P口、翻转电磁换向阀30的P口、平移电磁换向阀31的P口、夹紧电磁换向阀32的P口、竖移电磁换向阀34的P口和压力传感器35连接,电磁溢流阀27的T口与翻转电磁换向阀30的T口、平移电磁换向阀31的T口、夹紧电磁换向阀32的T口和竖移电磁换向阀34的T口相连,与油箱接通。所述电磁溢流阀27、翻转电磁换向阀30、平移电磁换向阀31、夹紧电磁换向阀 32、竖移电磁换向阀34的电磁铁与控制器170的输出端连接,控制器170输入端与压力传感器35信号输出端、水平判别接近开关19和45°判别接近开关 20连接;
翻转电磁换向阀30的A口与翻转油缸11无杆腔连接,翻转油缸11有杆腔与平衡阀29的B口连接,平衡阀29的A口与翻转电磁换向阀30的B口连接;所述的平移电磁换向阀31的A口与马达减速机22的一端连接,马达减速机22的另一端与平移电磁换向阀31的B口连接,马达减速机22上安装有编码器36,编码器36的信号输出端与控制器170的输入端连接;所述的夹紧电磁换向阀32的A口与单向减压阀33的A口连接,单向减压阀33的B口与夹紧油缸169的有杆腔连接,夹紧油缸169的无杆腔与夹紧电磁换向阀32的B 口连接;所述的竖移电磁换向阀34的A口与竖移油缸166有杆腔连接,竖移油缸166有杆腔与平衡阀29的B口连接,平衡阀29的A口与竖移电磁换向阀 34的B口连接。
底座1前端两侧分别布置有销孔,用于通过插销21固定平移后导向架6。
支撑梁14上部梁侧面设有夹钳限位板25。
左剪夹臂165和右剪夹臂167的下部均安装有可更换的耐磨夹体168。
如图1、图7所示,该装置自动释放和回收使用步骤如下:
潜体释放过程如下:
1、按下QD按钮,控制器170控制油泵26开启,电磁溢流阀27得电。按下SF按钮,竖移电磁换向阀34换向至左位工作,竖移油缸166缩回,平衡阀29防止突然下落,夹钳16接触潜体18后,压力传感器35检测压力达到一定值停止。夹紧电磁换向阀32换向至左位工作,夹紧压力由单向减压阀33控制,夹紧油缸169缩回,压力传感器35检测压力上升至一定值后,竖移电磁换向阀34换向至右位,竖移油缸166行程结束,压力传感器35检测压力达到一定值时止,潜体18夹紧提升结束;
2、平移电磁换向阀31换向至左位,马达减速机22带动车轮24使导向架 6在底座1上平移,编码器36检测马达减速机转角,控制器170计算平移位移并存储,当移动位移达到设定距离时,声音提示插销,延时等待插销21固定,延时时间结束时,导向架6平移结束;
3、倾转电磁换向阀28换向至右位,平衡阀29防止突然下落,倾转油缸8 伸出,翻转油缸11浮动,倾转油缸8行程结束时止,7形托架9的90°翻转结束;
4、翻转电磁换向阀30换向至左位,平衡阀29防止突然下落,翻转油缸 11伸出,支撑梁14转动,当导向架6上水平判别接近开关19有信号输出,停止动作,支撑梁14翻转至水平;
5、竖移电磁换向阀34换向至左位,竖移油缸166缩回,平衡梁163通过耐磨体168夹紧潜体18带动潜体18下移,竖移油缸166行程结束,压力传感器35检测压力达到一定值时止,潜体18下移结束;
6、翻转电磁换向阀30换向至左位,平衡阀29防止突然下落,翻转油缸 11伸出,压力传感器35检测压力达到一定时停止,潜体18在绞车吊控下释放完毕。
潜体回收:
1、潜体18在绞车吊控下放置在7形托架9上。油泵26开启,电磁溢流阀 27得电。按下HS按钮,竖移电磁换向阀34换向至左位工作,竖移油缸166 缩回,平衡阀29防止突然下落,竖移油缸166行程结束,压力传感器35检测压力达到一定值时停止。夹紧电磁换向阀32换向至左位工作,夹紧压力由单向减压阀33控制,夹紧油缸169缩回,压力传感器35检测压力达到一定值后停止;
2、翻转电磁换向阀30换向至右位,翻转油缸11缩回,当导向架6上水平判别接近开关19突然无信号输出停止,支撑梁14翻转至水平;
3、竖移电磁换向阀34换向至右位,竖移油缸166伸出,平衡梁163通过耐磨体168夹紧潜体18带动潜体18上升,竖移油缸166行程结束,压力传感器35检测压力达到一定值时止,潜体18上升结束;
4、翻转电磁换向阀30换向至右位,翻转油缸11缩回,支撑梁14转动,翻转油缸11行程结束,压力传感器35检测压力达到一定值时止,翻转油缸11 动作结束。
5、倾转电磁换向阀28换向至左位,倾转油缸8缩回,翻转油缸11浮动,当导向架6上45°判别接近开关20突然有信号输出时停止,声音提示拔插销21,延时等待插销21拔出,延时时间结束时,7形托架9的90°翻转结束;
6、平移电磁换向阀31换向至右位,马达减速机22带动车轮24使导向架 6在底座1上平移,编码器36检测马达减速机转角,控制器170根据位移存储值减移动值计算位移,当移动位移为0时停止,导向架6平移结束;
7、竖移电磁换向阀34换向至左位,竖移油缸166缩回,平衡梁163通过耐磨体168夹紧潜体18带动潜体18下移,潜体18接触7字形托架,压力传感器35检测压力达到一定值时,停止。夹紧电磁换向阀32换向至右位工作,夹紧油缸169伸出,行程结束,压力传感器35检测压力达到一定值时停止,潜体18被松开。电磁溢流阀27失电,油泵26停止。
舱载潜体全液压水平释放装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0