

IPC分类号 : B64G1/10I,B64G1/24I,B64G1/66I,B64G4/00I








专利摘要
本发明公开了一种基于多子星协同的空间碎片绳网抓捕系统及方法,包括主星和若干依次可分离连接的子星系统,位于连接末端的子星系统与主星可分离连接;主星上设置控制系统、通信雷达、遥测装置和若干姿控装置,通信雷达、遥测装置和若干姿控发动机均与控制系统连接;子星系统包括若干子星和抓捕绳网,若干子星与抓捕绳网边缘均匀连接。通过控制子星之间的相对运动以及抓捕绳网的张合实现待捕获空间碎片的抓捕;基于多个子星相对运动的灵活性,通过协同控制,采用抓捕绳网对待捕获空间碎片进行包裹,可适用于具有几何外形多样、几何尺寸不一的待捕获空间碎片,且不需要提前精确知晓待捕获空间碎片的信息,就能实现对待捕获空间碎片的抓捕。
权利要求
1.一种基于多子星协同的空间碎片绳网抓捕系统的基于多子星协同的空间碎片绳网抓捕方法,所述抓捕系统包括主星(1)和若干子星系统;若干子星系统依次可分离连接,位于连接末端的子星系统与主星(1)可分离连接;主星(1)上设置控制系统、通信雷达、遥测装置和若干姿控装置,通信雷达、遥测装置和若干姿控发动机均与控制系统连接;子星系统包括若干子星(2)和抓捕绳网,若干子星(2)与抓捕绳网边缘均匀连接;
遥测装置用于测量主星(1)与待捕获空间碎片(8)的状态信息,并发送至控制系统和若干子星(2);
控制系统用于根据遥测装置发送的状态信息和/或通信雷达发送的子星状态信息生成子星控制指令并发送至通信雷达,生成姿控控制指令发送至姿控装置;
通信雷达用于接收子星(2)发送的子星状态信息并发送至控制系统,接收控制系统发送的子星控制指令并发送至子星(2);
子星(2)用于发送子星状态信息至通信雷达,接收通信雷达发送的子星控制指令,并根据子星控制指令、子星状态信息和待捕获空间碎片(8)的状态信息生成子星姿控控制指令,根据子星姿控控制指令进行子星姿态机动;
姿控装置用于根据姿控控制指令进行主星(1)的姿态机动;
抓捕绳网用于在子星姿态机动的牵引下抓捕并收容待捕获空间碎片(8);其特征在于,所述抓捕方法包括以下步骤:
S1:通过若干姿控装置控制主星(1)向待捕获空间碎片(8)方向移动;
S2:当主星(1)与待捕获空间碎片(8)的距离为预设距离时,雷达系统发送子星控制指令至距离主星(1)最远的子星系统,该子星系统与主星(1)分离并向待捕获空间碎片(8)的方向移动;
S3:子星系统中的一个子星(2)通过子星状态信息、雷达系统发送子星控制指令以及所有子星(2)测量的待捕获空间碎片(8)的运动信息,生成子星姿控控制指令并发送至其余子星(2),所有子星(2)根据子星姿控控制指令进行子星姿态机动,展开抓捕绳网;
S4:子星系统持续向待捕获空间碎片(8)的方向移动,至待捕获空间碎片(8)完全进入抓捕绳网时,收缩抓捕绳网完成抓捕。
2.根据权利要求1所述的基于多子星协同的空间碎片绳网抓捕方法,其特征在于,所述S3中展开抓捕绳网的过程中,子星(2)的运动控制率为:
u=k
其中,x
3.根据权利要求1所述的基于多子星协同的空间碎片绳网抓捕方法,其特征在于,所述S4中子星系统持续向待捕获空间碎片(8)的方向移动时采用滑模控制的方法控制子星系统的移动,滑模控制率为:
其中,slaw=-εs-ρsgn(s)为滑模面的逼近率,s=x
其中,x
其中,r为抓捕绳网中心点在待捕获空间碎片(8)本地坐标系的位置向量,v
说明书
技术领域
本发明属于航空航天领域,涉及一种空间碎片的捕获系统及方法,尤其是一种基于多子星协同的空间碎片绳网抓捕系统及方法。
背景技术
伴随着人类对空间资源的不断探索与利用,由故障失效卫星、各种爆炸以及碎片等各种原因造成的大量空间垃圾,不仅占据着宝贵的轨道资源,还对正常在轨运行的航天器的安全造成了严重威胁。尤其是以失效卫星等为代表的大型空间碎片,一旦发生碰撞,将会产生更多的次生碎片。所以,对失效航天器等空间碎片清理迫在眉睫。
然而,由于空间碎片几何外形多种多样、几何尺寸大小不一,运动参数不确定(大多数空间碎片呈现足有翻滚运动状态),且无专门的抓捕对接机构、无合作测量装置等,使得空间碎片的抓捕极具挑战性。
发明内容
本发明的目的在于克服上述现有技术的缺点,提供一种基于多子星协同的空间碎片绳网抓捕系统及方法。
为达到上述目的,本发明采用以下技术方案予以实现:
一种基于多子星协同的空间碎片绳网抓捕系统,包括主星和若干子星系统;若干子星系统依次可分离连接,位于连接末端的子星系统与主星可分离连接;主星上设置控制系统、通信雷达、遥测装置和若干姿控装置,通信雷达、遥测装置和若干姿控发动机均与控制系统连接;子星系统包括若干子星和抓捕绳网,若干子星与抓捕绳网边缘均匀连接;遥测装置用于测量主星与待捕获空间碎片的状态信息,并发送至控制系统和若干子星;控制系统用于根据遥测装置发送的状态信息和/或通信雷达发送的子星状态信息生成子星控制指令并发送至通信雷达,生成姿控控制指令发送至姿控装置;通信雷达用于接收子星发送的子星状态信息并发送至控制系统,接收控制系统发送的子星控制指令并发送至子星;子星用于发送子星状态信息至通信雷达,接收通信雷达发送的子星控制指令,并根据子星控制指令、子星状态信息和待捕获空间碎片的状态信息生成子星姿控控制指令,根据子星姿控控制指令进行子星姿态机动;姿控装置用于根据姿控控制指令进行主星的姿态机动;抓捕绳网用于在子星姿态机动的牵引下抓捕并收容待捕获空间碎片。
本发明进一步的改进在于:
每个子星上均设置天线、子星姿控装置、子星测量装置和子星控制系统,天线和子星姿控装置均与子星控制系统连接,天线与通信雷达连接;天线用于接收子星姿控装置发送的子星状态信息并发送至通信雷达,接收通信雷达发送的子星控制指令并发送至子星控制系统;子星测量装置用于测量待捕获空间碎片的运动信息,并发送至子星控制系统;子星控制系统用于根据子星控制指令、子星状态信息和待捕获空间碎片的运动信息生成子星姿控控制指令并发送至子星姿控装置;子星姿控装置用于测量子星状态信息并发送至天线和子星控制系统,根据子星姿控控制指令进行子星的姿态机动。
抓捕绳网包括上层网、下层网、牵引绳和若干条电动系绳;上层网和下层网连接;上层网上开设开口,开口边缘均布若干引导环和若干单向收线器;牵引绳位于引导环内部且与单向收线器和上层网连接;每条电动系绳一端均连接牵引绳,另一端均连接子星。
上层网、下层网、牵引绳和引导环均采用凯夫拉材质,单向收线器采用钛合金或PVC材质,电动系绳采用铝线。
主星上还设置若干减震连接装置;减震连接装置包括榫接单元和若干弹簧减震单元;榫接单元和若干弹簧减震单元均与子星连接。
位于连接末端的子星系统与主星通过爆炸螺栓连接。
主星上还设置若干太阳能电池板。
本发明另一方面,一种基于多子星协同的空间碎片绳网抓捕方法,包括以下步骤:
S1:通过若干姿控装置控制主星向待捕获空间碎片方向移动;
S2:当主星与待捕获空间碎片的距离为预设距离时,雷达系统发送子星控制指令至距离主星最远的子星系统,该子星系统与主星分离并向待捕获空间碎片的方向移动;
S3:子星系统中的一个子星通过子星状态信息、雷达系统发送子星控制指令以及所有子星测量的待捕获空间碎片的运动信息,生成子星姿控控制指令并发送至其余子星,所有子星根据子星姿控控制指令进行子星姿态机动,展开抓捕绳网;
S4:子星系统持续向待捕获空间碎片的方向移动,至待捕获空间碎片完全进入抓捕绳网时,收缩抓捕绳网完成抓捕。
本发明抓捕方法进一步的改进在于:
S3中展开抓捕绳网的过程中,子星的运动控制率为:
u=kp(xp-xpd)+kv(xv-xvd)
其中,xp=[x,y,z]T为主星的位置向量, 为主星的速度向量;xpd为子星的期望位置,xvd为子星的期望速度,kp和kv均为调节系数。
S4中子星系统持续向待捕获空间碎片的方向移动时采用滑模控制的方法控制子星系统的移动,滑模控制率为:
其中,slaw=-εs-ρsgn(s)为滑模面的逼近率,s=xv-xvd+C(xp-xpd)为滑模面;xpd为子星的期望位置:
其中,x0和z0是抓捕绳网中心点在目标碎片本地坐标系中分量的初始值;
其中,r为抓捕绳网中心点在待捕获空间碎片本地坐标系的位置向量,v0和v1为常值,v0满足|Δv|min<|v0|<|Δv|max;|Δv|max为抓捕绳网与待捕获空间碎片的相对速度的最大限定值,|Δv|min为抓捕绳网与待捕获空间碎片相对速度的最小限定值。
与现有技术相比,本发明具有以下有益效果:
本发明抓捕系统,通过遥测装置测量主星与待捕获空间碎片的状态信息,并发送至控制系统和若干子星,子星发送子星状态信息至通信雷达并通过通信雷达发送至控制系统;控制系统根据遥测装置发送的状态信息和/或通信雷达发送的子星状态信息生成子星控制指令,子星根据子星控制指令、子星状态信息和待捕获空间碎片的状态信息生成子星姿控控制指令,根据子星姿控控制指令进行子星姿态机动,进而通过控制若干子星之间的相对运动,展开与子星连接的抓捕绳网,并带动抓捕绳网向待捕获空间碎片方向移动,实现待捕获空间碎片的抓捕和收容。基于多个子星相对运动的灵活性,通过主星的协同控制,采用抓捕绳网对待捕获空间碎片进行包裹,能够适用于具有几何外形多样、几何尺寸不一的待捕获空间碎片,且不需要提前精确知晓待捕获空间碎片的信息,就能实现对待捕获空间碎片的抓捕,大大减小待捕获空间碎片的抓捕难度。子星系统为抓捕任务作为主要执行机构,在完成抓捕任务之后,子星系统可以携带待捕获空间碎片一起进入大气层,这种方案相对于子星系统重复利用的方案,虽然看起来经济性不好,然而实际上对于大型碎片的抓捕,这个方案能够大幅降低燃料消耗,也避免回收利用的难度和风险,减小任务周期,主星的设计允许通过在轨服务补充卫星系统,且代价远小于子星系统重复利用,在保证可行性的同时,亦不失经济性。
本发明抓捕方法,首先调整主星与待捕获空间碎片之间的位置关系,当达到预设距离时,控制与主星最远的子星系统进行分离,通过该子星系统内的多个子星展开连接的抓捕绳网,并带着抓捕绳网向待捕获空间碎片方向移动,至待捕获空间碎片完全进入抓捕绳网时,收缩抓捕绳网完成抓捕。在过程中,基于子星系统内多个子星的相对运动的灵活性,抓捕绳网的控制更便捷,且能够适用于具有几何外形多样、几何尺寸不一的待捕获空间碎片,不需要提前精确知晓待捕获空间碎片的信息,大大减小抓捕的难度进而提升抓捕的成功率。
附图说明
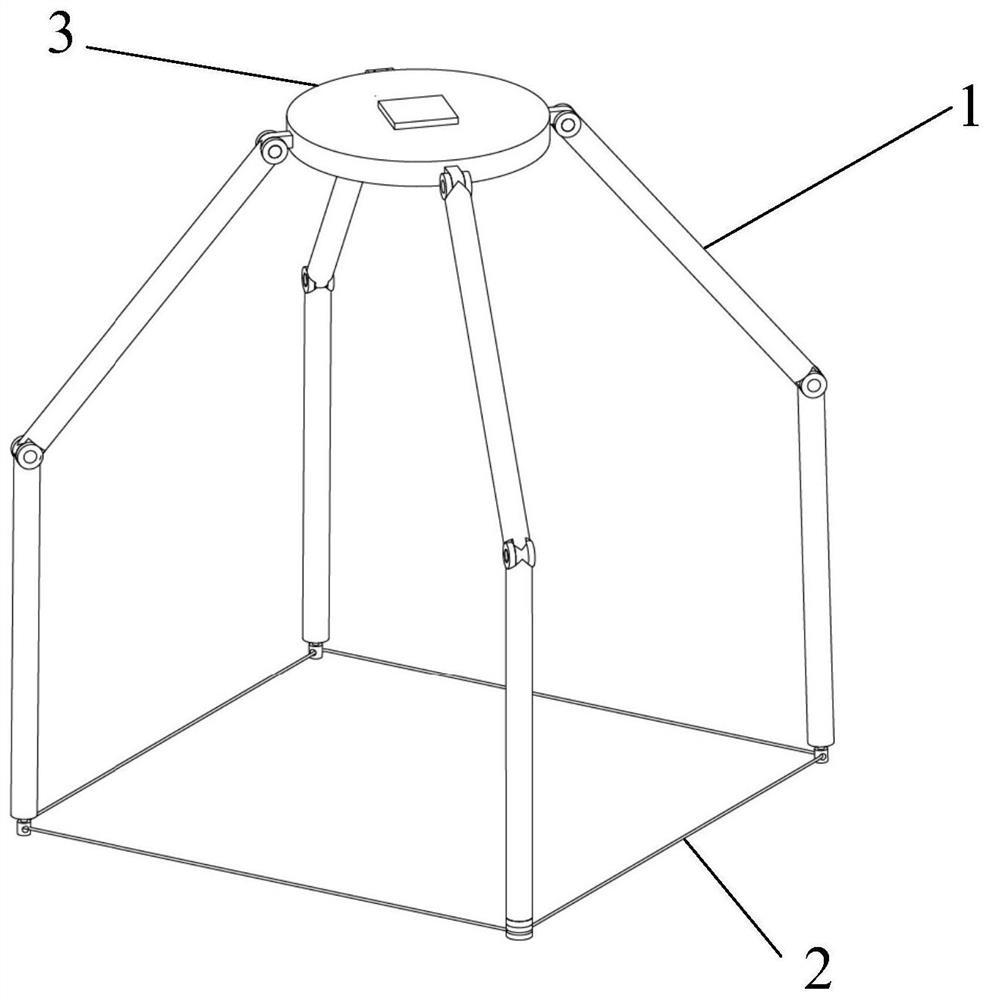
图1为本发明的主星和子星系统未分离的示意图;
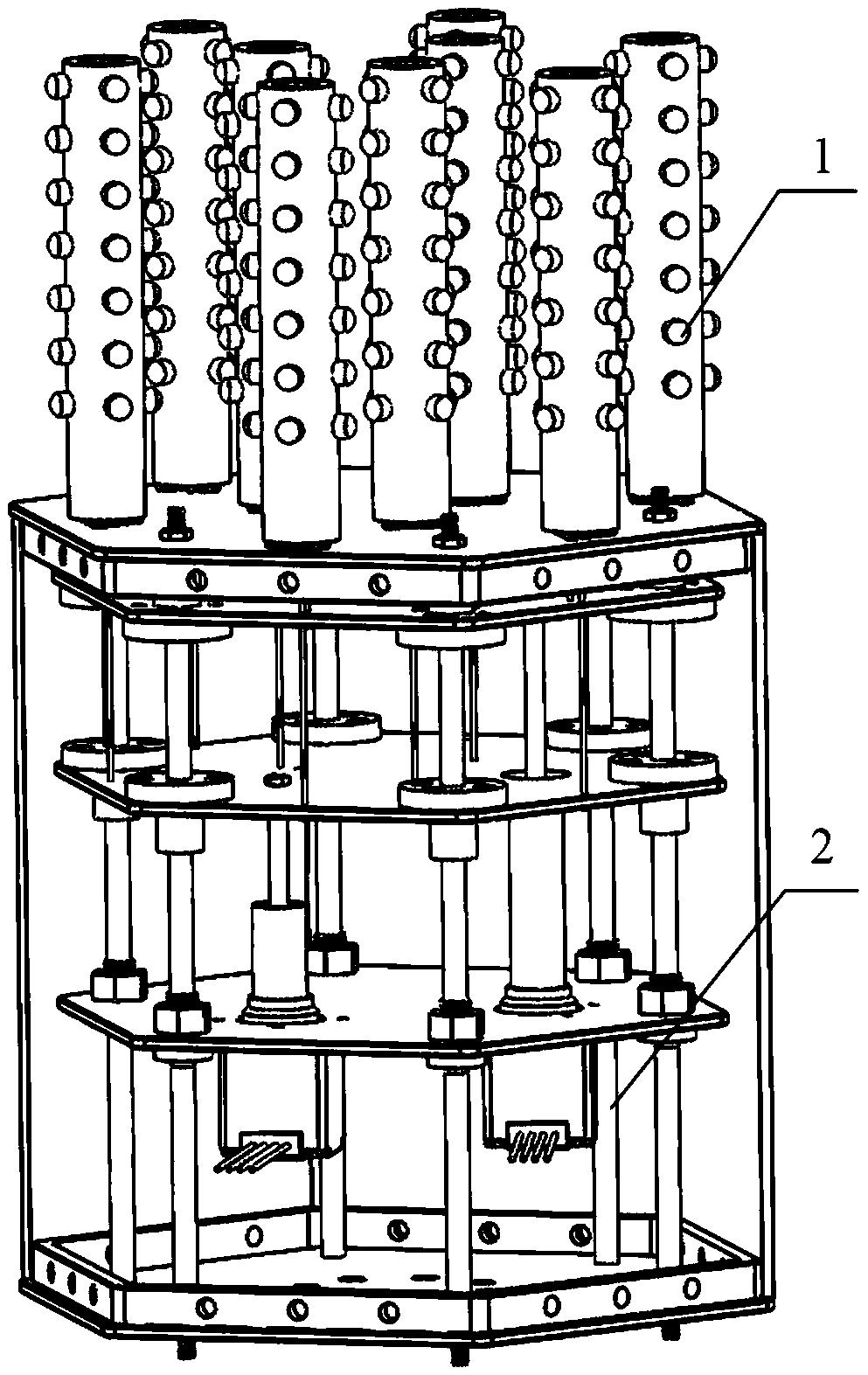
图2为本发明的主星结构示意图;
图3为本发明的主星与子星系统连接点示意图;
图4为本发明的主星与子星系统俯视图;
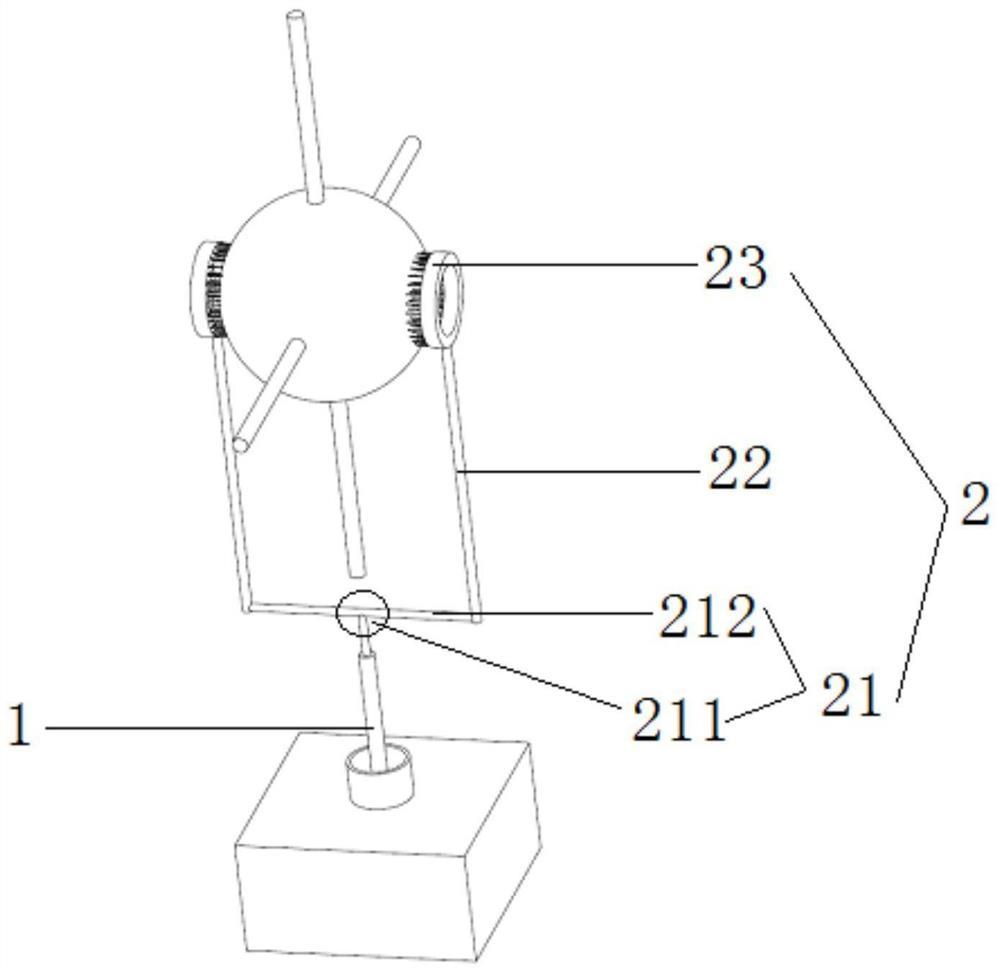
图5为本发明的子星系统示意图;
图6为本发明的子星连接示意图;
图7为本发明的子星收拢状态结构示意图;
图8为本发明的抓捕绳网的上层网结构示意图;
图9为本发明的抓捕绳网的下层网结构示意图;
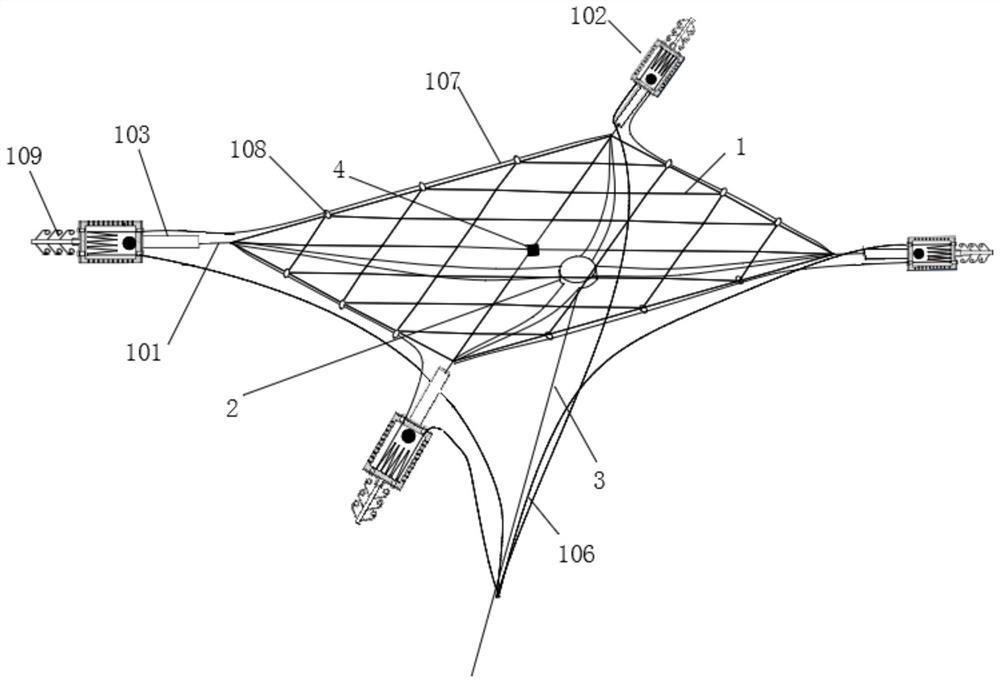
图10为本发明的抓捕绳网的结构示意图;
图11为本发明的子星牵引抓捕绳网展开的示意图;
图12为本发明的抓捕绳网抓捕空间碎片的示意图。
其中:1-主星;2-子星;3-太阳能电池板;4-上层网;5-牵引绳;6-单向收线器;7-下层网;8-待捕获空间碎片。
具体实施方式
为了使本技术领域的人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
需要说明的是,本发明的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本发明的实施例能够以除了在这里图示或描述的那些以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
下面结合附图对本发明做进一步详细描述:
参见图1-7,本发明基于多子星协同的空间碎片绳网抓捕系统,包括主星1和若干组依次可分离连接的子星系统;位于连接末端的子星系统与主星1通过爆炸螺栓连接;主星1上设置控制系统、通信雷达、遥测装置和若干姿控装置,通信雷达、遥测装置和若干姿控发动机均与控制系统连接;子星系统包括若干子星2和抓捕绳网,若干子星2与抓捕绳网边缘均匀连接。
遥测装置用于测量主星1与待捕获空间碎片8的状态信息,并发送至控制系统;控制系统用于根据遥测装置发送的状态信息和/或通信雷达发送的子星状态信息生成子星控制指令并发送至通信雷达,生成姿控控制指令发送至姿控装置;通信雷达用于接收子星2发送的子星状态信息并发送至控制系统,接收控制系统发送的子星控制指令并发送至子星2;子星2用于发送子星状态信息至通信雷达,接收通信雷达发送的子星控制指令,并根据子星控制指令、子星状态信息和待捕获空间碎片8的运动信息生成子星姿控控制指令,根据子星姿控控制指令进行子星姿态机动;姿控装置用于根据姿控控制指令进行主星1的姿态机动;抓捕绳网用于在子星姿态机动的牵引下抓捕并收容待捕获空间碎片8。
主星1上还设置若干减震连接装置;减震连接装置包括榫接单元和若干弹簧减震单元;榫接单元和若干弹簧减震单元均与子星2连接;主星1上还设置若干太阳能电池板3。
每个子星2上均设置天线、子星姿控装置、子星测量装置和子星控制系统,天线和子星姿控装置均与子星控制系统连接,天线与通信雷达连接;天线用于接收子星姿控装置发送的子星状态信息并发送至通信雷达,接收通信雷达发送的子星控制指令并发送至子星控制系统;子星测量装置用于测量待捕获空间碎片8的运动信息,并发送至子星控制系统;子星控制系统用于根据子星控制指令、子星状态信息和待捕获空间碎片8的运动信息生成子星姿控控制指令并发送至子星姿控装置;子星姿控装置用于测量子星状态信息并发送至天线和子星控制系统,根据子星姿控控制指令进行子星2的姿态机动。
抓捕绳网包括上层网4、下层网7、牵引绳5和若干条电动系绳;上层网4和下层网7连接;上层网4上开设开口,开口边缘均布若干引导环和若干单向收线器6;牵引绳5位于引导环内部且与单向收线器6和上层网4连接;每条电动系绳一端均连接牵引绳5,另一端均连接子星2。上层网4、下层网7、牵引绳5和引导环均采用凯夫拉材质,单向收线器6采用钛合金或PVC材质,电动系绳采用铝线。
本发明另一方面,一种基于多子星协同的空间碎片绳网抓捕方法,包括以下步骤:
S1:通过若干姿控装置控制主星1向待捕获空间碎片8方向移动。
S2:当主星1与待捕获空间碎片8的距离为预设距离时,雷达系统发送子星控制指令至距离主星1最远的子星系统,子星系统与主星1分离并向待捕获空间碎片8的方向移动。
S3:子星系统中的一个子星2通过子星状态信息、雷达系统发送子星控制指令以及所有子星2测量的待捕获空间碎片8的运动信息,生成子星姿控控制指令并发送至其余子星2,所有子星2根据子星姿控控制指令进行子星姿态机动,展开抓捕绳网。
其中,展开抓捕绳网的过程中,子星2运动的控制率为:
u=kp(xp-xpd)+kv(xv-xvd)
其中,xp=[x,y,z]T为主星1的位置向量, 为主星1的速度向量;xpd子星2的期望位置,xvd为子星2的期望速度,kp,kv为调节系数。
S4:子星系统持续向待捕获空间碎片8的方向移动,至待捕获空间碎片8完全进入抓捕绳网时,收缩抓捕绳网完成抓捕。
其中,子星系统持续向待捕获空间碎片8的方向移动时采用滑模控制的方法控制子星系统的移动,滑模控制率为:
其中,slaw=-εs-ρsgn(s)为滑模面的逼近率,s=xv-xvd+C(xp-xpd)为滑模面;xpd为子星2的期望位置:
其中,x0和z0是抓捕绳网中心点在目标碎片本地坐标系中初始值的分量;
其中,r为抓捕绳网中心点在待捕获空间碎片8本地坐标系的位置向量,v0和v1是常值,v0满足|Δv|min<|v0|<|Δv|max;|Δv|max为抓捕绳网与待捕获空间碎片8的相对速度的最大限定值,|Δv|min为抓捕绳网与待捕获空间碎片8相对速度的最小限定值。
实施例
本实施例提供一种采用三颗子星2协同,通过控制子星2之间的相对运动以及抓捕绳网的张合实现空间碎片抓捕的方案。基于三个子星2编队相对运动的灵活性,通过协同控制,采用抓捕绳网对失效卫星等空间碎片进行包裹。该抓捕方案可适用于具有几何外形多样、几何尺寸不一,且不需要精确知晓目标信息的条件下,实现对空间碎片的抓捕,包括以下几个方面。
抓捕系统设计,抓捕系统包括一个主星1和两个子星系统。子星系统包括三个子星2与抓捕绳网,子星2与抓捕绳网在抓捕的时候同时释放。为确保抓捕的成功,一个主星1同时携带两组子星系统,共包括六颗子星2。在发射前,主星1携带两组子星系统处于收拢状态,参见图1。在抓捕任务之前,主星1承载子星系统飞行,其链接结构能够保证在无指令的情况下子星系统与主星1保持固连状态而避免脱离。在抓捕任务过程中,主星1可以发出指令,使最上方的子星系统与主星1的链接机构打开,释放子星系统。在抓捕任务前,抓捕绳网在子星2内存放。当子星系统与主星1分离以后,三个子星2之间的相对位置发生变化,触发绳网结构,绳网结构展开。通过调节三个子星2、抓捕绳网与空间碎片之间的相对位置,最终实现抓捕绳网对空间碎片的捕获。
抓捕系统的主星1设计,参见图2-4,主星1是一个六棱柱状的几何结构。这里为方面描述,主星1的六个侧面被定义为A1,B1,C1,A2,B2和C2,其中A1,B1和C1分别为A2,B2和C2相对的面;两个端面定义为D1和D2。主星1的D2面为承载面,上方放置有子星系统,在A1,B1,A2以及B2面上设置八个多向喷气口,可提供三轴六方向的力矩,通雷达以及遥测装置安装于D1面上,用于测量主星1与碎片的状态信息,在抓捕阶段,主星1进行姿态机动,从而保持D1面对准分离后的子星系统。姿控装置安装于A1,B1,A2,B2面上,太阳能电池板3安装于C1,C2面上。在D2面上,安装有一组减震连接装置,该装置配合主星1的连接装置,将子星系统串联地固结于主星1之上,减震连接装置中的若干弹簧减震单元作用是降低子星2振动对主星1的影响。主星1上的一些其他常规设计参见表1,主星1器件及功能表。
表1主星1器件及功能表
抓捕系统的子星2设计,参见图5-7,子星2质量约为24Kg,尺寸为240mm×240mm×360mm,其功能包括自主脱离主星1,与主星1的通讯,展开抓捕结构,对空间碎片协同抓捕等。每个子星2安装有一个天线,以发送自身状态并接收主星1发送的子星控制指令。另外,子星2装有子星姿控装置,其作用为提供子星2姿态参数,进而通过姿控发动机调整集群姿态,从而提高碎片撞击到抓捕机构的可能性。子星系统的锁紧单元,既可以在子星2相互分离之前将它们相互锁紧,也可以在它们分离之后作为定向天线进行通讯,子星2在脱离主星1之前子星2通过爆炸螺栓与主星1相连。
抓捕系统的抓捕绳网设计,参见图8-10,抓捕绳网用于完成对空间碎片的抓捕与收容,由上层网4、下层网7、电动系绳、单向收线器6、牵引绳5、以及引导环六部分构成,其作用由表2所示。抓捕绳网随子星系统展开而展开,由于抓捕绳网足够轻,因而其尺寸可以做得足够大,抓捕绳网张开后截面尺寸约为5m×5m量级,具有抓捕并收容大型空间碎片的能力。当子星系统携带抓捕绳网与待捕获空间碎片8交会之后,随着待捕获空间碎片8进入抓捕绳网内部,并接触下层网7,下层网7便会牵拉牵引绳5,而牵引绳5经过单向收线器6、引导环与上层网4相连,并最终令上层网4收口,达到锁住待捕获空间碎片8的目的。抓捕绳网相对于飞网方案优势明显,其运动可控而无需预先建立复杂模型以预测飞网状态,且在接触待捕获空间碎片8后能够将其锁住,而降低目标逃逸的可能。
表2抓捕绳网结构表
主星1释放子星系统过程,当主星1-子星系统组合与待捕获空间碎片8之间的距离为100米时,三颗子星2和主星1的组合体相互分离,相应地展开抓捕绳网,参见图11。随后,安装在三个子星2上的测量装置如摄像机开始同时测量待捕获空间碎片8的运动信息。在这个过程中,所有的计算工作都是由一个子星2进行的,它与其他两个子星2的计算能力不同。结合其他两个子星2的测量信息,该子星2计算并发送控制指令到其他两个子星2,以协同控制抓捕系统接近待捕获空间碎片8。
根据轨道相对运动动力学,三颗子星2相对待捕获空间碎片8的相对运动关系可以在待捕获空间碎片8的轨道坐标系中进行描述,其形式为:
其中,u=[ux,uy,uz]T表示作用于子星2的主动控制,T=[Tx,Ty,Tz]T为电动系绳的拉力,具有如下形式:
其中,L0为电动系绳的自然长度,L为电动系绳的实际长度,k为电动系绳的弹性系数。选取状态变量,有 相对运动公式可以改写成如下形式:
由于三颗子星2在不同方向上的运动是连续的,因而抓捕绳网将会连续地展开。三颗子星2的控制率可以写成如下形式:
u=kp(xp-xpd)+kv(xv-xvd)
xp=[x,y,z]T, 分别是主星1的位置与速度向量,xpd和xvd分别是子星2的位置和速度的期望值。抓捕系统要求,在抓捕绳网完成展开后,三颗子星2也要抵达期望位置,同时保持子星2相对速度为零。通过调节系数kp,kv,子星系统将会按要求完成展开动作。
子星系统逼近待捕获空间碎片8的过程如下:在子星系统展开之后,子星系统将继续飞行,并抵达待捕获空间碎片8的速度方向上。出于安全因素的考虑,抓捕绳网与待捕获空间碎片8的相对速度有最大值|Δv|max,出于触发抓捕绳网的考虑,抓捕绳网与待捕获空间碎片8相对速度有最小值|Δv|min,在该取值范围内选取合适值作为子星2与待捕获空间碎片8的期望相对速度,设定为如下形式:
其中,v0和v1是常值,v0满足|Δv|min<|v0|<|Δv|max,r为抓捕绳网中心点在待捕获空间碎片8本地坐标系的位置向量。
子星2的期望位置:
其中,x0和z0是抓捕绳网中心点在初始值的分量。
为了能够实现子星系统携带抓捕绳网与待捕获空间碎片8交会,设计滑模控制率,其滑模面如下:
s=xv-xvd+C(xp-xpd)
滑模面的逼近率为指数逼近形式:
slaw=-εs-ρsgn(s)
滑模控制率为:
利用该滑模控制率,子星系统能够实现与待捕获空间碎片8的近距离交会,且具有很好的稳定性,不受环境干扰。
使用抓捕绳网捕获待捕获空间碎片8,相对位置的精确度和抓捕绳网与待捕获空间碎片8之间的相对速度不太相关,因此该抓捕系统允许较大的位置误差和速度误差,安装在子星2上的测量装置可以尺寸小,精度低。考虑到在捕获阶段存在抓捕绳网和待捕获空间碎片8之间的较小的相对速度,待捕获空间碎片8碎片将落入抓捕绳网中。值得注意的是,接近和捕获过程都由主星1进行监控,如果发生任何意外,将通过主星1向子星2发送指令来强制子星2结束捕获任务。
抓捕系统通过三个子星2的控制接近待捕获空间碎片8,抓捕绳网与待捕获空间碎片8之间的距离逐渐减小。在抓捕阶段,待捕获空间碎片8与绳网碰撞,随后将待捕获空间碎片8收入抓捕绳网中。参见图12,一旦待捕获空间碎片8撞到抓捕绳网的底部,就会在牵引线上施加张力,当该张力大小超过阈值时,抓捕绳网的口部将在0.5s内由安装在抓捕绳网上的单向收线器6进行折叠,将待捕获空间碎片8捕获在抓捕绳网中。
面对数以万计的需要被移除的空间碎片,需要做到依据轻重缓急,进行分门别类。毫无疑问,移除中低轨道的上面级和报废卫星是最有价值、最有挑战意义,也是最具迫在眉睫的任务之一。因此,我们舍弃了原先传统设计中的太空运输等功能。本设计专精于一个任务——抓捕并移除空间碎片,且适用于10Kg量级以及100Kg量级、中低轨道的空间碎片,从而最大程度上保证产品完成该任务的能力。融合了子星系统和绳系卫星等技术,设计了新型开环绳系子星系统方案,并通过引入“蚁后”主星1的概念,合理地弥补了子星系统和绳系卫星的先天劣势,具有一定的工程应用价值。子星系统为抓捕任务作为主要执行机构,在完成抓捕任务之后,子星系统可以携带待捕获空间碎片8一起进入大气层,这种方案相对于子星系统重复利用的方案,虽然看起来经济性不好,然而实际上对于大型碎片的抓捕,这个方案能够大幅降低燃料消耗,也避免回收利用的难度和风险,减小任务周期。值得一提的是,主星1的设计允许通过在轨服务补充子星系统,且代价远小于子星系统重复利用,因而该方案在保证可行性的同时,亦不失经济性。
以上内容仅为说明本发明的技术思想,不能以此限定本发明的保护范围,凡是按照本发明提出的技术思想,在技术方案基础上所做的任何改动,均落入本发明权利要求书的保护范围之内。
一种基于多子星协同的空间碎片绳网抓捕方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0