






专利摘要
本发明为采用接触式法大规模定点捕获微米球的方法,以微纳米加工工艺制备的硅微米结构作为器件结构基础,采用方法一和方法二,分别实现无跨越微米结构的定点捕获和跨越微米结构的定点捕获。这两种方法通过以宏观手势控制微观小球运动的方式,实现了低成本、接触式的操纵微粒移动与捕获,操作过程约十分钟,操作人员无需特殊技能培训,操作设备价格低廉。该方法可以快速、高效、可重复地控制微粒的移动,实现大面积范围内的微米球移动和定点捕获。
权利要求
1.采用接触式法大规模定点捕获微米球的方法,其特征在于,
(1)使用由微纳米加工工艺制备的器件,器件表面呈现出远水亲酒精的特征,器件可兼容太赫兹超材料传感性能,器件由制备在硅衬底上的微米结构阵列构成,微米结构覆盖面积为5mm x 5mm 至15mm x 15mm,硅微米结构高10~20μm,硅微米结构顶层可覆盖0.1 ~1μm厚的金属薄膜层以形成太赫兹超材料谐振结构,微米结构按照蜂窝结构规律周期性分布形成阵列,即每一行微米结构等距离重复排列,相邻两行微米结构交错分布;以下描述中,以微米结构所在的行为x方向,与之垂直的为y方向;
(2)使用无水乙醇分散的微米球溶液,溶液浓度为5x10
(3)使用加热板进行加热、烤干步骤,加热板温度设置为75~85℃;
(4)使用纯净水流进行冲洗步骤,水流速度为7~8mL/s;冲洗时,器件y方向与水流呈40~50°夹角斜置;
(5)利用拇指顺着y方向从上而下轻抹器件表面或者在器件表面轻轻地做圆圈状涂揉运动来操控微米球的微观移动,实现定点捕捉。
2.如权利要求1所述的采用接触式法大规模定点捕获微米球的方法,其特征在于,根据微米结构的设计特点,采用方法一实现微米球的定点捕获:
方法一:操纵微粒在微米结构之间移动直至被预设的卡位捕获;
器件要求微米结构阵列中所有捕获微粒的卡位朝向y方向,且该方向上没有明显允许微粒通过的通道;操作步骤如下:
步骤1:将器件置于加热板上预热一分钟,按滴滴上微米球溶液,待前一滴液体蒸发后,再滴下一滴,共滴5~10滴,以保证器件上有足够数量的微米球,滴完烤干后冷却;
步骤2:将器件置于纯净水流下冲洗,器件y方向与水流呈40~50°夹角斜置,保持卡位开口朝斜上方,冲洗过程中,用大拇指顺着y方向从上而下轻抹器件表面带动微米球移动到卡位,重复约5~10次。
3.如权利要求1所述的采用接触式法大规模定点捕获微米球的方法,其特征在于,根据微米结构的设计特点,采用方法二实现微米球的定点捕获:
方法二:操纵微粒在微米结构之间移动的同时,跨越微米结构,进入特定卡位;
器件要求微米结构阵列:
1.每个微米结构内仅能捕获一个微米球,且微米结构尺寸与微米球相近,使微米球一旦进入后不易出来;
2.微米结构在x方向留有明显空行作为多余微粒离开的通道,而在y方向没有明显允许微粒通过的通道;
操作步骤如下:
步骤一,将器件平置,先滴一滴微米球溶液,然后用大拇指在器件表面轻轻地做圆圈状涂揉的动作,使溶液均匀分布在器件表面,同时加速分散液体的挥发,帮助微米球跨越结构障碍进入结构中间的卡位,待第一滴溶液完全挥发后,再滴第二滴;
步骤二,按照步骤一,重复滴5~10滴溶液并涂揉;
步骤三,将器件置于加热板上烤30秒,使器件完全干燥、冷却后,将器件置于纯净水流下冲洗,器件y方向与水流呈40~50°夹角斜置,冲洗过程中,用大拇指顺着x方向左右轻抹,再顺着y方向从上而下轻抹,二者交替进行,重复约10次,帮助多余的微米球从通道中离开器件表面。
说明书
技术领域
本发明涉及操纵微粒的移动与捕获方法,特别涉及一种采用接触式法大规模定点捕获微米球的方法。
背景技术
微粒的捕获与移动是微操作中的关键技术,广泛应用在生物工程、医药、纳米自组装、化学分析、材料性能评定等各个领域。最近十几年发展起来的太赫兹超材料传感技术更依赖于微粒的大规模定点捕获。太赫兹超材料可以用于感应溶液中的微粒含量、生物细胞、微生物等,其感应的灵敏度取决于被感应物能否落入器件谐振单元结构的敏感位置。在立体超材料结构尚未被研究出来之前,平面太赫兹超材料在用作传感器时,只能不加选择地使被感应物涂满整个器件表面,完全无法实现微粒的移动和定点捕获,因而器件的灵敏度很低。近年来,一些研究团队尝试着在太赫兹超材料表面建立微通道,利用微流控技术将微粒引导到器件的敏感位置。但这种做法对微粒的形状大小、流体粘度、微流通道的设计以及器件的制备等都提出了很高的要求,目前的捕获率和传感灵敏度也不甚理想。
另一方面,纵观现今的微粒捕获与移动技术,可将之分为直接接触式与非接触式两种方法。接触式操作一般通过微操作工具对微粒进行直接操作,该方法对操作者的技术水平要求高,容易造成微粒损伤;且使用的微操作工具设计复杂,价格高昂,无法实现大规模微粒的移动;因而效率低,可重复性差。非接触式又可分为激光法、电场法、电磁法、超声波法和微流控方法等。这些方法分别适用于具有特定特征的微粒,适用范围较窄;并且大多需要昂贵、复杂的操作设备和繁琐的操作过程,也无法高效率、大规模地实现微粒的定点捕获。
发明内容
为了解决上述技术问题,本发明采用接触式法大规模定点捕获微米球的方法,其技术方案为:
(1)使用由微纳米加工工艺制备的器件,器件表面呈现出远水亲酒精的特征。器件可兼容太赫兹超材料传感性能。器件由制备在硅衬底上的微米结构阵列构成,微米结构覆盖面积为5mm x 5mm 至15mm x 15mm。硅微米结构高10~20μm。可选地,硅微米结构顶层可覆盖0.1 ~1μm厚的金属薄膜层以形成太赫兹超材料谐振结构,微米结构按照蜂窝结构规律周期性分布形成阵列,即每一行微米结构等距离重复排列,相邻两行微米结构交错分布。以下描述中,以微米结构所在的行为x方向,与之垂直的为y方向。
(2)使用无水乙醇分散的微米球溶液,溶液浓度为5x10
(3)使用加热板进行加热、烤干步骤,加热板温度设置为75~85℃。
(4)使用纯净水流进行冲洗步骤,水流速度为7~8mL/s。冲洗时,器件y方向与水流呈40~50°夹角斜置。
(5)利用拇指的宏观运动来操纵微米球的微观移动,实现定点捕捉。
进一步地,根据微米结构的设计特点,采用方法一实现微米球的定点捕获:
方法一:操纵微粒在微米结构之间移动直至被预设的卡位捕获;
器件要求微米结构阵列中所有捕获微粒的卡位朝向y方向,且该方向上没有明显允许微粒通过的通道;操作步骤如下:
步骤1:将器件置于加热板上预热一分钟,按滴滴上微米球溶液,待前一滴液体蒸发后,再滴下一滴,共滴5~10滴,以保证器件上有足够数量的微米球,滴完烤干后冷却;
步骤2:将器件置于纯净水流下冲洗,器件y方向与水流呈40~50°夹角斜置,保持卡位开口朝斜上方,冲洗过程中,用大拇指顺着y方向从上而下轻抹器件表面带动微米球移动到卡位,重复约5~10次。
进一步地,根据微米结构的设计特点,采用方法二实现微米球的定点捕获:
方法二:操纵微粒在微米结构之间移动的同时,跨越微米结构,进入特定卡位;
器件要求微米结构阵列:
1.每个微米结构内仅能捕获一个微米球,且微米结构尺寸与微米球相近,使微米球一旦进入后不易出来;
2.微米结构在x方向留有明显空行作为多余微粒离开的通道,而在y方向没有明显允许微粒通过的通道;
操作步骤如下:
步骤一,将器件平置,先滴一滴微米球溶液,然后用大拇指在器件表面轻轻地做圆圈状涂揉的动作,使溶液均匀分布在器件表面,同时加速分散液体的挥发,帮助微米球跨越结构障碍进入结构中间的卡位。待第一滴溶液完全挥发后,再滴第二滴;
步骤二,按照步骤一,重复滴5~10滴溶液并涂揉;
步骤三,将器件置于加热板上烤30秒,使器件完全干燥,冷却后,将器件置于纯净水流下冲洗,=器件y方向与水流呈40~50°夹角斜置,冲洗过程中,用大拇指顺着x方向左右轻抹,再顺着y方向从上而下轻抹,二者交替进行,重复约10次,帮助多余的微米球从通道中离开器件表面。
本发明的有益效果为:本发明为接触式大规模定点捕获微米球的方法,以微纳米加工工艺制备的硅微米结构作为器件结构基础,采用上述方法一和方法二,分别实现无跨越微米结构的定点捕获和跨越微米结构的定点捕获。上述两种方法通过以宏观手势控制微观小球运动的方式,提供了低成本、接触式的操纵微粒移动与捕获的方法,操作过程约十分钟,操作人员无需特殊技能培训,操作设备价格低廉。该方法可以快速、高效、可重复地控制微粒的移动,实现大面积范围内的微米球移动和定点捕获。
附图说明
图1为本发明实施例1单元结构示意图;
图2为本发明实施例1阵列示意图;
图3为本发明实施例2单元结构示意图;
图4为本发明实施例2阵列示意图;
图5为本发明实施例3单元结构示意图;
图6为本发明实施例3阵列示意图;
图7为本发明实施例4单元结构示意图;
图8为本发明实施例4阵列示意图;
图9为本发明实施例5单元结构示意图;
图10为本发明实施例5阵列示意图;
图11为本发明实施例6单元结构示意图;
图12为本发明实施例6阵列示意图。
具体实施方式
本发明为采用接触式法大规模定点捕获微米球的方法,采用上述方法一和方法二进行详述:
实施例中使用无水乙醇分散的聚苯乙烯微米球溶液。溶液浓度为5.7x10
s1、在清洗好的本征硅(100)衬底上,旋涂光刻胶,采用紫外曝光方法在所述光刻胶上获得具有预定图形的光刻胶结构;
s2、采用镀膜方法在所述悬浮的微米结构上沉积一层金属薄膜,经过剥离工艺,获得光刻所定义图形的金属结构;
s3、采用干法刻蚀方法将所述图形转移至所述本征硅衬底上。
进一步地,所述s1中所述本征硅(100)衬底清洗依次采用丙酮、酒精、去离子水进行超声清洗,清洗时间各5~10min,最后用氮气吹干。
进一步地,所述本征硅(100)衬底清洗后放置于加热板上烘烤5~10 min。
进一步地,所述s1中所述光刻胶为对紫外光敏感光刻胶;旋涂所述光刻胶后,放置于加热板上烘烤1~2 min;
可选地,烘烤温度为180 ℃。
进一步地,所述s1中通过修改所述紫外曝光的剂量调节所述微米结构的尺寸精度;曝光后进行显影和定影;
可选地,显影时间为60s,定影时间为30s。
进一步地,所述s2中金属薄膜的厚度为500 nm;
进一步地,所述s3中干法刻蚀方法采用电感耦合等离子体反应刻蚀技术以SF6和O2作为工艺气体;
可选地,腔内气压为20微米汞柱的压强(mTorr),SF6流量为40毫升/分钟(sccm),O2流量为8毫升/分钟(sccm),射频功率为550W,刻蚀时间为6~8min。
以下实施例1~3采用方法一,实施例4~6采用方法二。
一、实施例1
本实施例采用方法一,使用直径为20μm的微米球,硅微米结构高15μm。
器件采用的单元结构为双开口谐振环(如图1和图2)。双开口谐振环外环外直径为30μm,外环内直径23μm,内环外直径为14μm,内环内直径为7μm,所述外环开口长24μm,外环开口即为定点捕获20μm微米球的卡位。所述内环开口长10μm,且与外环开口朝向相对。阵列重复周期为90μm x 90 μm. 相邻行与行之间的单元结构横向错开45μm。相邻两个单元结构中的双开口谐振环之间最窄距离为30μm,在显微镜下随机选取四处不同的约300μm x 300μm的区域,每处统计10个连续的单元结构,统计这共计40个卡位中成功捕获直径20μm微米球的卡位个数,求得平均约62.5%的捕获率。如下表一所示:
表一
二、实施例2
本实施例采用方法一,使用直径为15μm的微米球,硅微米结构高12μm。
器件采用的单元结构为方形单开口谐振环(如图3和图4)。环的外壁长和宽均为22μm,拐角处由半径为4μm的90°圆弧衔接。环的内壁长为20μm,宽为18μm。所述方形单开口谐振环开口处宽18μm,开口即为定点捕获15μm微米球的卡位;阵列重复周期为52μm x 52 μm.相邻行与行之间的单元结构横向错开26μm。相邻两个单元结构中的谐振环之间最窄距离为30μm。在显微镜下随机选取四处不同的约300μm x 300μm的区域,每处统计16个连续的单元结构,统计这共计64个卡位中成功捕获直径15μm微米球的卡位个数,求得平均约64.1%的捕获率。如下表二所示:
表二
三、实施例3
本实施例采用方法一,使用直径为25μm的微米球,硅微米结构高18μm。
器件采用的单元结构为圆形单开口谐振环(如图5和图6)。圆的直径为80μm。圆内设开口,开口由两部分组成。上部分是长宽分别为40μm和28μm的长方形,下半部分是与外圆同心且半径为12μm的半圆。开口即为定点捕获25μm微米球的卡位,每卡位可捕获两个微米球。阵列重复周期为132μm x 132μm. 相邻行与行之间的单元结构横向错开66μm。相邻两个单元结构中的谐振环之间最窄距离为52μm。在显微镜下随机选取四处不同的约450μm x450μm的区域,每处统计10个连续的单元结构,统计这共计40个卡位中成功捕获直径25μm微米球的卡位个数,求得平均约70.0%的捕获率。如下表四所示:
表三
四、实施例4
本实施例采用方法二,使用直径为20μm的微米球,硅微米结构高15μm。
器件采用的单元结构为圆形单开口谐振环(如图7和图8)。环的外直径为30μm,内直径为24μm。环的开口处宽5μm。环的中心为定点捕获20μm微米球的卡位。阵列重复周期为60μm x 60 μm. 相邻行与行之间的单元结构横向错开30μm。相邻两个单元结构中的谐振环之间最窄距离为30μm。在显微镜下随机选取四处不同的约300μm x 300μm的区域,每处统计16个连续的单元结构,统计这共计64个卡位中成功捕获直径20μm微米球的卡位个数,求得平均约57.8%的捕获率。如表四所示:
表四
五、实施例5
本实施例采用方法二,使用直径为25μm的微米球,硅微米结构高18μm。
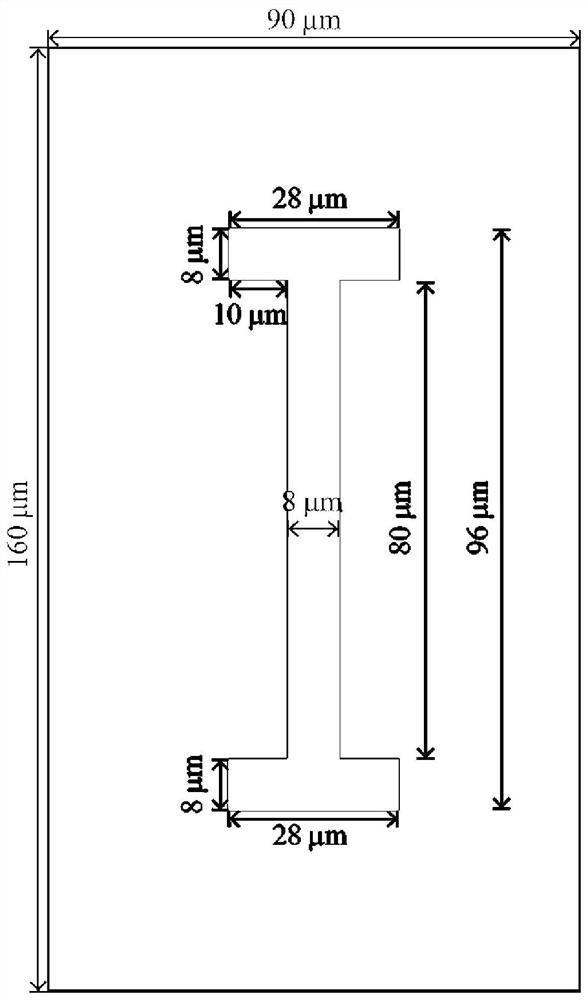
器件采用的单元结构为菱形单开口谐振环(如图9和图10)。环的外边长为32μm,环的内边长为28μm。环的开口处宽4μm,关于菱形的对角线对称。环的中心为定点捕获25μm微米球的卡位。阵列重复周期为96μm x 96 μm. 相邻行与行之间的单元结构横向错开48μm。相邻两个单元结构中的谐振环之间最窄距离为50.74μm。在显微镜下随机选取四处不同的约350μm x 350μm的区域,每处统计10个连续的单元结构,统计这共计40个卡位中成功捕获直径25μm微米球的卡位个数,求得平均约62.5%的捕获率。如表五所示:
表五
六、实施例6
本实施例采用方法二,使用直径为15μm的微米球,硅微米结构高12μm。
器件采用的单元结构为单开口方形谐振环结构(如图11和图12)。
环的外壁长和宽均为22μm,拐角处由半径为4μm的90°圆弧衔接。环的内壁长和宽均为18μm。环的开口处宽为6μm,位于环一条边的中间。环的中心为定点捕获15μm微米球的卡位。阵列重复周期为52μm x 52 μm.相邻行与行之间的单元结构横向错开26μm。相邻两个单元结构中的谐振环之间最窄距离为30μm。在显微镜下随机选取四处不同的约300μm x300μm的区域,每处统计16个连续的单元结构,统计这共计64个卡位中成功捕获直径15μm微米球的卡位个数,求得平均约 70.3%的捕获率。如表六所示:
表六
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
采用接触式法大规模定点捕获微米球的方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0