






专利摘要
本发明公开了一种基于非线性模型预测控制的航空发动机直接推力控制方法。本发明方法直接以推力为控制目标,而不是传统控制方法采取不可测参数为控制目标的方法。采用在线滑动窗口深度神经网络作为预测模型,该模型采用深度学习结构,可提高模型精度,并基于滑动窗口方法来在线选取训练数据,降低了对训练数据噪声的敏感性。相比于目前流行的控制方法相比,所提出的方法将加速时间缩短了0.425秒,响应速度提高了1.14倍左右。
权利要求
1.一种基于非线性模型预测控制的航空发动机直接推力控制方法,其特征在于,以推力为直接控制目标,使用非线性模型预测控制方法进行控制;具体通过求解以下滚动优化问题实现:
其中r为发动机控制指令, 为控制目标预测值,u为控制变量向量,Nf、Nc分别为风扇转速、压气机转子转速,Smf、Smc分别为风扇喘振裕度、压气机喘振裕度,T41为高压涡轮进口温度,Q和R正定对称,正整数Nu和Np分别为控制时域和预测时域。
2.如权利要求1所述基于非线性模型预测控制的航空发动机直接推力控制方法,其特征在于,使用预先训练的在线滑动窗口深度神经网络作为所述非线性模型预测控制方法的预测模型,所述在线滑动窗口深度神经网络的损失函数描述为:
其中x为输入向量,y为输出向量,j表示为第j时刻,L为滚动区间长度,fDNN表述深度神经网络的映射,W为权重矩阵,b为偏置向量。
3.如权利要求2所述基于非线性模型预测控制的航空发动机直接推力控制方法,其特征在于,所述预测模型的输入xDNN和输出yDNN具体如下:
其中,Wfb(k),Nf(k),Nc(k),Smf(k),Smc(k),T41(k),F(k)分别为k时刻的发动机燃油输入、风扇转速、压气机转子转速、风扇喘振裕度、压气机喘振裕度、高压涡轮进口温度、发动机推力,m1,m2,…,m7为预设的正整数。
说明书
技术领域
本发明涉及一种航空发动机控制方法,尤其涉及一种基于非线性模型预测控制的航空发动机直接推力控制方法。
背景技术
航空发动机的主要功能是快速、准确地为飞机提供推力。传统的发动机控制策略是基于传感器的,即通过控制发动机可测参数如转子转速、发动机压比(EPR)或其他可测参数来间接控制推力。但由于退化、制造和制造公差等因素,发动机推力与可测参数之间的对应关系会发生变化。因此,如果采用传统的控制思想,发动机推力控制误差必然存在。此外,为了保证发动机在最坏工况点都能安全稳定运行,传统的控制策略往往保持较大的安全裕度,这种策略会极大地限制发动机在其他操作点的性能。
针对这些缺点,研究者发明了一种新的控制策略——基于模型的发动机控制方法(ModelBasedEngineControl,MBEC),直接控制发动机性能。其中模型预测控制(ModelPredictive Control,MPC)是基于模型的发动机控制中一个重要的关键技术和研究领域。MPC具有比传统控制器具有更好的加速性能,在航空发动机控制领域引起了广泛的研究兴趣。VroemenBG等将MPC技术应用于实验室燃气轮机中。Brunell等研究了状态估计的带约束的非线性模型预测控制(Nonlinear ModelPredictive Control,NMPC)的可行性,并将其应用于涡喷发动机的仿真模型中。DeCastro提出了一种基于线性变参数的NMPC,并应用于商用涡扇发动机主动叶尖间隙。Richter提出了一种多路复用的实现方法,极大地减少了NMPC优化算法的计算量。Di Cairano等开发了一种MPC策略,通过电子节流阀和火花定时来控制发动机转速至地面慢车。以上工作的模型预测模型主要集中于线性模型上,取得了很好的控制效果。然而,航空发动机是一个强非线性动力装置,线性模型的建模误差不可避免。此外,传统NMPC的控制目标是可测量的参数。而可测参数与发动机推力或功率的对应关系随时发动机服役时间变化,从而导致推力控制精度下降。
发明内容
本发明所要解决的技术问题在于克服现有技术不足,提供一种基于非线性模型预测控制的航空发动机直接推力控制方法,可有效提高发动机的响应能力。
本发明具体采用以下技术方案解决上述技术问题:
一种基于非线性模型预测控制的航空发动机直接推力控制方法,以推力为直接控制目标,使用非线性模型预测控制方法进行控制;具体通过求解以下滚动优化问题实现:
其中r为发动机控制指令, 为控制目标预测值,u为控制变量向量,Nf、Nc分别为风扇转速、压气机转子转速,Smf、Smc分别为风扇喘振裕度、压气机喘振裕度,T41为高压涡轮进口温度,Q和R正定对称,正整数Nu和Np分别为控制时域和预测时域。
优选地,使用预先训练的在线滑动窗口深度神经网络作为所述非线性模型预测控制方法的预测模型,所述在线滑动窗口深度神经网络的损失函数描述为:
其中x为输入向量,y为输出向量,j表示为第j时刻,L为滚动区间长度,fDNN表述深度神经网络的映射,W为权重矩阵,b为偏置向量。
进一步优选地,所述预测模型的输入xDNN和输出yDNN具体如下:
其中,Wfb(k),Nf(k),Nc(k),Smf(k),Smc(k),T41(k),F(k)分别为k时刻的发动机燃油输入、风扇转速、压气机转子转速、风扇喘振裕度、压气机喘振裕度、高压涡轮进口温度、发动机推力,m1,m2,…,m7为预设的正整数。
相比现有技术,本发明技术方案具有以下有益效果:
本发明可显著提高航空发动机控制系统的控制精度和响应速度。
附图说明
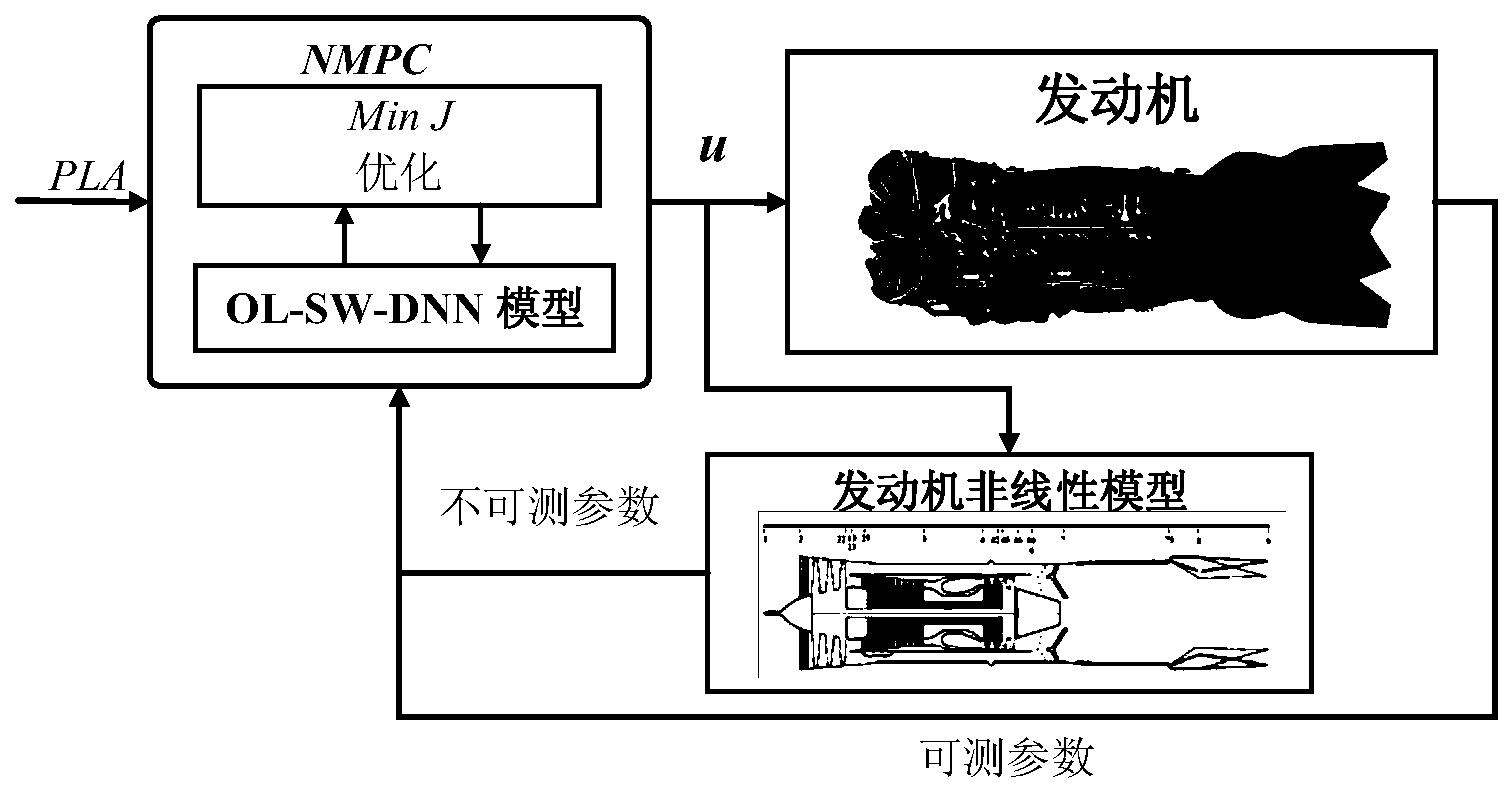
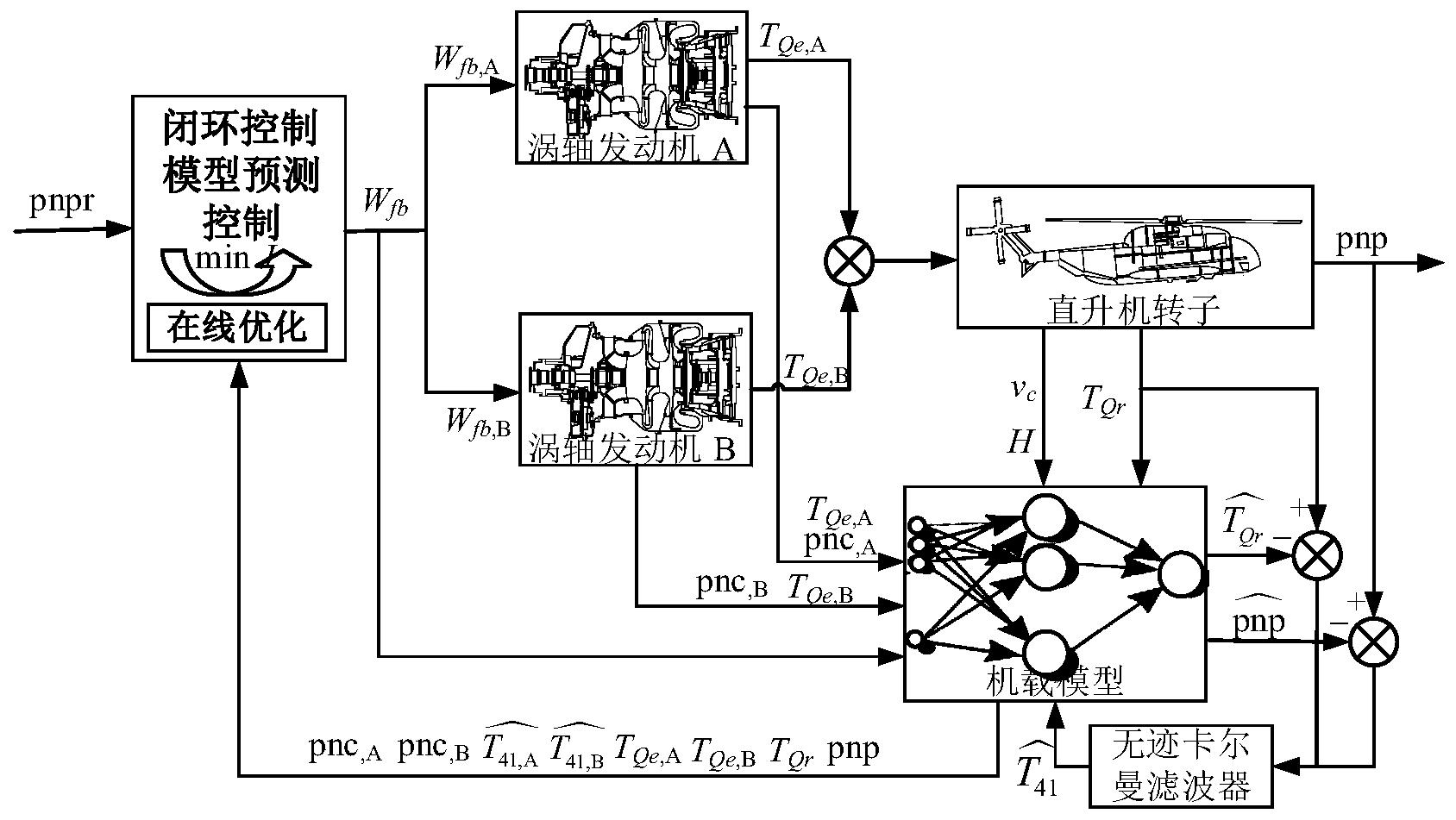
图1为本发明的非线性模型预测控制系统结构示意图;
图2为滚动优化原理示意图;
图3为深度神经网络图;
图4为滑动窗口原理示意图;
图5为反向传播算法原理示意图;
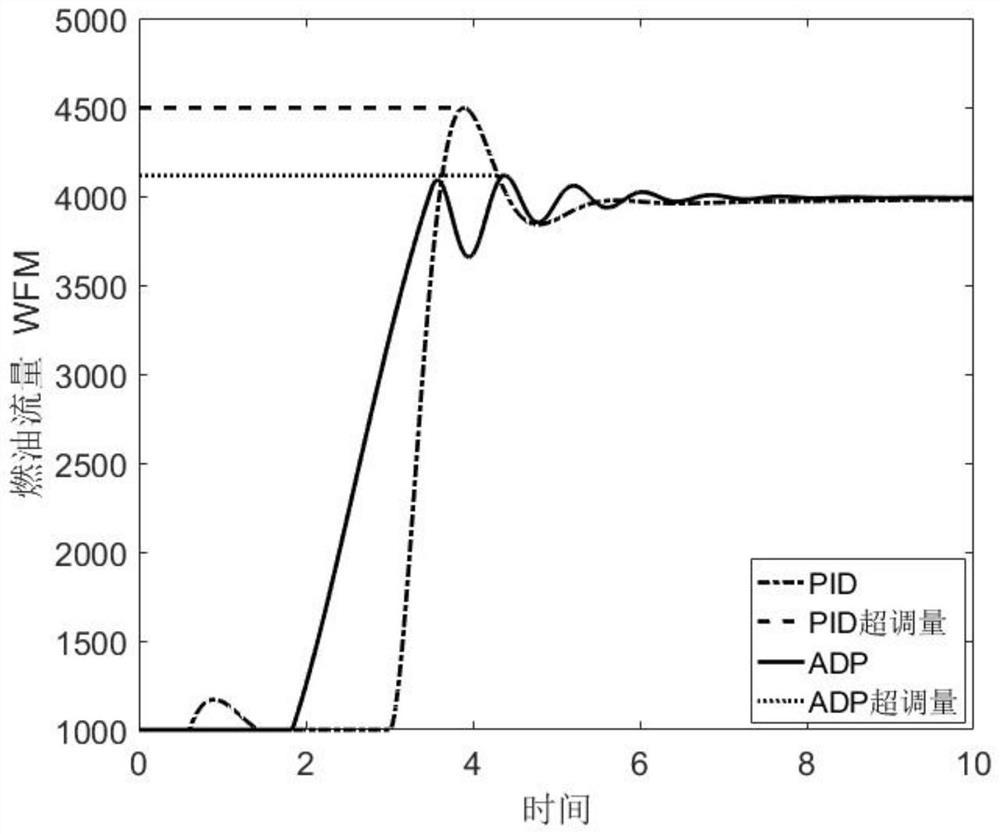
图6(a)~图6(g)为本发明方法的仿真结果,其中的F、T41、Nf、Nc、Smf、Smc作了归一化处理。
具体实施方式
针对现有技术不足,本发明的思路是以推力为直接控制目标,使用非线性模型预测控制方法进行控制,从而提高航空发动机控制系统的控制精度和响应速度。
下面结合附图对本发明的技术方案进行详细说明:
本发明的非线性模型预测控制系统结构如图1所示。发动机非线性模型估计不可测量参数,NMP模块包含优化子模块和预测模型子模块,本发明采用在线滑动窗深度神经网络(OL-SW-DNN)作为预测模型,比传统的神经网络和支持向量回归等其他浅层网络结构具有较强的拟合能力,提高了预测精度。在优化子模块中,NMPC的优化目标是推力指令。可以看出,NMPC的优化子模块和预测模型子模块是关键技术,具体如下。
非线性模型预测控制是一个闭环、受限的在线优化控制。如图2所示,在k时刻,其控制目标为:
其中,r为控制指令, 为控制目标预测值,u为控制变量向量,Q和R正定对称。正整数Nu和Np分别为控制区间和预测区间。
传统航空发动机的控制目标总是选择可测量的参数,如发动机增压比或转子转速。但推力与可测参数之间的关系会随着使用时间的变化而变化。因此,本发明的控制目标是直接控制推力F。
发动机的运行时受到机械和部件温度限制的限制,如风扇和压气机的转子转速限制、风扇和压气机的喘振裕度限制、高压涡轮的进口温度等限制。此外,还应考虑执行机构的物理约束。因此,为了保证发动机安全稳定运行,发动机运行应满足以下约束条件:
其中Nf、Nc分别为风扇、压气机转子转速,Smf、Smc分别为风扇、压气机喘振裕度,T41为高压涡轮进口温度。
方程(1)和方程(2)中的控制目标和限制约束是通过预测模型计算得到。预测模型的准确性将直接影响控制效果。传统NMPC的预测模型为线性模型。然而,航空发动机的瞬态过程是一个很强的非线性过程。因此,发明了一种基于在线滑动窗口深度神经网络(OnLine Sliding Window Deep Neural Network,OL-SW-DNN)作为预测模型的NMPC。
DNN对非线性对象具有较强的拟合能力,可描述为:
y=fDNN(x) (3)
其中x为输入向量,y为输出向量。为了保持发动机的动态特性,预测模型的输入包括当前和历史时刻的发动机燃油输入Wfb,以及历史时刻的Smf,Smc,Nf,T41和F。预测模型的输入和输出是:
其中,m1,m2,…,m7的选择与发动机的非线性度有关。如图3、图4所示,DNN具有多层网络结构,DNN的隐含层越多,DNN的拟合能力越强。DNN的每一层可以定义为:
al+1=Wlhl+bl (5)
hl+1=σ(al+1) (6)
其中,Wl是权重矩阵,bl是偏置向量,σ是激活函数,hl(l>0)是l层的输出,l=1,2,…,nl,nl是每层的隐含节点个数。
OL-SW-DNN的损耗函数描述为:
W和b更新如下:
其中, 分别是 的梯度,η是学习率。
和 可以通过图5所示的反向传播算法计算得到:
其中,δl是:
其中,l=nnet,nnet-1,L,2, 是Hadamard积
令 为:
其中,nnet是网络层数。
为验证该方法的有效性,分别对基于本发明方法的NMPC和基于扩展卡尔曼滤波(ExtendedKalman Filter,EKF)的流行NMPC进行了仿真。这两种方法的仿真过程都选择了发动机加速过程。加速过程以油门杆角度PLA=26°的稳态工作点为起点,以PLA=70°的稳态工作点为终点。这两种仿真的运行条件都是高度H=0千米、马赫数Ma=0时的标准大气状态。附图给出了基于EKF的NMPC和提出的NMPC的加速过程仿真,其中‘NMPC-EKF’表示基于EFK的NMPC,‘NMPC-DNN’表示基于OL-SW-DNN的NMPC。为了方便起见,下面将这两种方法分别描述为传统的NMPC和提出的NMPC。对图中发动机参数进行了归一化处理。
如图6(a)所示,在传统的NMPC和提出的NMPC中,发动机推力增加到100%推力的时间分别为3.025秒和2.6秒。与传统的NMPC相比,提出的NMPC使加速时间减少了0.425秒,加速速度几乎增加了1.14倍。主要原因是传统的NMPC采用线性模型作为预测模型。然而,发动机的瞬态过程是一个很强的非线性过程。用线性模型作为预测模型,预测误差是不可避免的。而所发明NMPC采用OL-SW-DNN作为预测模型。OL-SW-DNN对非线性对象具有较强的拟合能力,提高了NMPC的预测精度。
如图6(g)所示,发动机在加速过程中的工作点沿喘振边界移动,这被认为是发动机加速度响应最快的路径。对于其他限制,如图6(c)~6(f)所示,发动机没有达到超温、超速或出现喘振。因此,本发明控制方法具有较高的控制精度和响应速度。
基于非线性模型预测控制的航空发动机直接推力控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。







动态评分
0.0