








专利摘要
本发明属于航天电推进技术领域,公开了可应用于多流态的智能控制吸气式电推进系统,本发明利用超低轨道稀薄气体作为工质进行姿轨控制以及阻力补偿推进。本发明通过抛物线型进气道将气体收集进入智能反馈增压系统,由分子泵与气泵对气体工质进行智能反馈增压并存入工质储箱,以供应由七组电推力器组成的混合型推力器系统产生推力,可实现多种推力模式,达到了姿轨控制以及阻力补偿的目的。该推进系统具有可应用于50km‑250km超低轨道连续流、自由分子流等多流态工作环境的优势,可使卫星在超低轨道稳定长期工作,在该轨道上的星载设备效率将会大大提高,在空间气象、大气模型、地球电场监控、地球遥感等领域都有着很大的开发价值。
权利要求
1.可应用于多流态的智能控制吸气式电推进系统,其特征在于,由进气道(1)、智能反馈增压系统(2)、混合型推力器系统(4)、控制系统(5)、供能系统组成;所述进气道(1)构型为抛物线型,包括前端入口及后端出口,其中,前端入口为系统迎风部位,后端出口连接智能反馈增压系统(2),所述进气道(1)用于对来流气体进行初步压缩;所述智能反馈增压系统(2)包括泵体、压力计及工质储箱;所述泵体包括一个适用于自由分子流的分子泵(21)以及一个适用于低压连续流的气泵(23),按照来流顺序,分子泵(21)、气泵(23)、工质储箱(25)按顺序串联,分子泵(21)连接于进气道(1)后端出口,压力计a(22)、压力计b(24)分别设置于气泵(23)前端以及工质储箱(25),与控制系统(5)相连,分别用于反馈调节分子泵(21)、气泵(23)的功率;所述混合型推力器系统(4)包括7个电推力器与7个限流阀,7个电推力器分别是磁等离子体推力器1(41)、磁等离子体推力器2(43)、磁等离子体推力器3(45)、磁等离子体推力器4(47)以及离子推力器1(42)、离子推力器2(44)、离子推力器3(46),并且7个电推力器并联密集排列,控制系统(5)分别控制电推力器功率以及限流阀流率;所述控制系统(5)带有无线信号接收装置以及有线信号输入端口,通过对无线遥控信号以及输入反馈信号进行处理,控制智能反馈增压系统(2)以及混合型推力器系统(4)的工作状态;所述供能系统包括电池以及太阳能板(3),太阳能板(3)覆盖于所述电推进系统外壳表面,不产生额外阻力,在工作中保持充电状态;供能系统与智能反馈增压系统(2)、混合型推力器系统(4)以及控制系统(5)连接,为智能反馈增压系统(2)、混合型推力器系统(4)以及控制系统(5)提供电源;所述进气道(1)在连续流气体环境中产生激波效应,对来流气体流进行压缩;在自由分子流气体环境中利用抛物线镜面反射聚焦效应,对来流气体粒子进行压缩;在过渡流态,所述激波效应、聚焦效应两种效应协同作用;初步压缩后的气体进入智能反馈增压系统(2)内进行进一步增压,以保证在不同轨道大气环境中均能得到良好压缩效果;所述分子泵(21)的工作状态由压力计a(22)进行负反馈调节;当压力计a(22)连通气压不满足气泵(23)的工作要求时,通过控制系统(5)增大分子泵(21)的功率以提高系统内的气体密度;所述气泵(23)的工作状态由压力计b(24)进行负反馈调节;当压力计b(24)连通的工质储箱(25)气压未达到额定值时,通过控制系统(5)控制气泵(23)持续工作;且压力计b(24)示数越小,反馈气泵(23)工作功率越高,以达到保证储箱内工质能够满足任务需求的目的。
2.如权利要求1所述的可应用于多流态的智能控制吸气式电推进系统,其特征在于,所述混合型推力器系统带有4个磁等离子体推力器,分别为磁等离子体推力器1(41)、磁等离子体推力器2(43)、磁等离子体推力器3(45)、磁等离子体推力器4(47),以及3个离子推力器,分别为离子推力器1(42)、离子推力器2(44)、离子推力器3(46),其中在高流率环境中,启用磁等离子体推力器1(41)、磁等离子体推力器2(43)、磁等离子体推力器3(45)、磁等离子体推力器4(47),其点火需求流率高,推力密度大;在低流率环境中,启用离子推力器1(42)、离子推力器2(44)、离子推力器3(46),其点火需求流率低,推力密度较小,控制精度高。
3.如权利要求1所述的可应用于多流态的智能控制吸气式电推进系统,其特征在于,所述抛物线型进气道(1)的抛物线焦点位于进气道后端出口外;在自由分子流环境工作时,分子热运动速度远小于飞行器速度,来流分子视为水平来流;由于抛物线的几何聚焦特性,在该进气道设计下粒子经过壁面镜面反射将会聚焦到抛物线的焦点,设计焦点位于后端出口外可以有效地提高进气道的进气效率。
4.如权利要求1所述的可应用于多流态的智能控制吸气式电推进系统,其特征在于,所述进气道(1)的壁面涂层为适用于含氧、高温环境的氟化镁镜面涂层,以提高在低流率环境工作时稀薄大气自由分子流的进气效率。
5.如权利要求1所述的可应用于多流态的智能控制吸气式电推进系统,其特征在于,所述混合型推力器系统(4)中的导电部位使用金镀层,不需导电部位使用陶瓷材料;智能反馈增压系统(2)的通气管道以及进气道(1)均使用含镍、钼不锈钢材料。
6.如权利要求1所述的可应用于多流态的智能控制吸气式电推进系统,其特征在于,所述供能系统中的太阳能板(3)覆盖在飞行方向的四个垂直面,其中飞行方向与进气道(1)入口面以及混合型推力器系统(4)出口面平行,不因太阳能(3)板产生额外的阻力。
7.如权利要求1所述的可应用于多流态的智能控制吸气式电推进系统,其特征在于,所述电推进系统所应用卫星的星载设备均置于进气道(1)、混合型推力器系统(4)以及四个太阳能板(3)所包括的六面体内部,卫星呈长条型以最小阻力工作。
8.如权利要求1所述的可应用于多流态的智能控制吸气式电推进系统,其特征在于,所述混合型推力器系统(4)中,7个推力器并联密集排列,其中磁等离子体推力器1(41)位于中心点,其他3个磁等离子体推力器即磁等离子体推力器2(43)、磁等离子体推力器3(45)、磁等离子体推力器4(47)及3个离子推力器即离子推力器1(42)、离子推力器2(44)、离子推力器3(46)以正六边形的6个顶点为圆心交替排列。
9.如权利要求1所述的可应用于多流态的智能控制吸气式电推进系统,其特征在于,所述混合型推力器系统(4)中,7个电推力器前端各连接一个限流阀,通过控制系统(5)分别对7个电推力器及其限流阀单独进行控制,以实现多种不同推力状态需求。
10.如权利要求1所述的可应用于多流态的智能控制吸气式电推进系统,其特征在于,所述混合型推力器系统(4)带有4个磁等离子体推力器,分别为磁等离子体推力器1(41)、磁等离子体推力器2(43)、磁等离子体推力器3(45)、磁等离子体推力器4(47)以及3个离子推力器,分别为离子推力器1(42)、离子推力器2(44)、离子推力器3(46),对于大阻力补偿需求与大阻力时的姿态调整需求,在储箱工质充足的情况下两种推力器协同工作,推力器工作功率以及限流阀流率由控制系统进行控制,以达到各个推力器的推力精确可调的使用目的,并通过分别控制7个推力器的推力大小产生合力与力矩,以满足姿轨控制与阻力补偿的任务需求。
说明书
技术领域
本发明属于航天电推进技术领域,具体涉及一种可机动变轨,可应用于连续流、自由分子流的智能控制吸气式电推进系统。
背景技术
随着航天技术的发展,空间轨道逐渐饱和。高度在50km-250km的超低轨道空间区域对于卫星工作而言具有较高的开发潜力,较低的轨道高度使得在该轨道上的星载设备效率将会大大提高,在空间气象、大气模型、地球电场监控、地球遥感等领域都有着很大的开发价值。但是由于超低轨道上稀薄大气的存在,与高轨道的真空环境相比,飞行器在超低轨道工作时会产生使其轨道高度衰减的气动阻力,限制了卫星的工作寿命,目前该轨道区域还处于未完全开发的状态。
高度在50km-250km范围内的大气环境变化显著。随着轨道高度的增加,大气密度连续降低,轨道大气从连续流态向自由分子流态过渡。特殊的工作环境对于飞行器而言有着特殊的工作要求。
电推进具有性能稳定、比冲高、推力可调、成本低等特点,是目前航天推进领域的热门研究方向。由于其特性,电推进在进行阻力补偿时有着良好的效果与性能。欧空局的地球重力场和海洋环流探测卫星项目(GOCE)卫星携带40kg氙气工质,使用电推进系统进行阻力补偿,在220km轨道上实现了4年多的任务寿命,验证了使用吸气式电推进进行阻力补偿的可行性。
然而,机载推进剂量仍限制着卫星的工作寿命。当用于进行阻力补偿的推进剂耗尽时,卫星无法继续在气动阻力的影响下保持轨道,将会脱轨坠落。而携带过多推进剂不仅会限制有效载荷,也会增加发射难度。考虑到电推进技术可以使用气体为工质进行电离推进,为实现更长的工作寿命以及更高的有效载荷,可通过收集轨道大气作为工质进行推进,可以在少携带甚至不携带工质的情况下在超低轨道完成阻力补偿工作。
发明内容
针对50km-250km超低轨道因阻力存在而未完全开发问题,本发明提供了一种可跨轨道工作,适用于带有智能反馈增压系统的,且能够实现姿轨控制与阻力补偿的吸气式电推进系统。该发明可以实现在50km-250km超低轨道范围内灵活机动,能够在较低轨连续流、较高轨自由分子流以及二者之间的过渡流等多种流态中进行工作,满足多种任务需求。
本发明的技术方案如下:
可应用于多流态的智能控制吸气式电推进系统,由进气道、智能反馈增压系统、混合型推力器系统、控制系统、供能系统组成。
所述进气道构型为抛物线型,包括前端入口及后端出口,其中,前端入口为系统迎风部位,后端出口连接智能反馈增压系统,所述进气道用于对来流气体进行初步压缩。
所述智能反馈增压系统包括泵体、压力计及工质储箱。
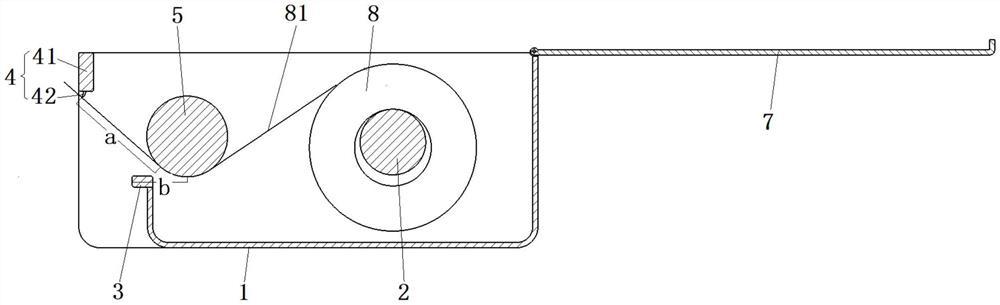
所述泵体包括一个适用于低压连续流的气泵以及一个适用于自由分子流的分子泵,按照来流顺序,分子泵、气泵、工质储箱按顺序串联,分子泵连接于进气道后端出口,工质储箱与混合型推力器系统相连。两个压力计分别设置于气泵前端以及工质储箱,与控制系统相连,分别用于反馈调节分子泵、气泵的功率。
所述混合型推力器系统包括7个电推力器与7个限流阀,控制系统分别控制电推力器功率以及限流阀流率。
所述混合型推力器系统的电推力器并联密集排列,含有4个磁等离子体推力器以及3个离子推力器。
所述控制系统带有无线信号接收模块以及有线信号输入端口,通过对无线遥控信号以及输入反馈信号进行处理,控制智能反馈增压系统以及混合型推力器系统的工作状态。
所述供能系统包括电池以及太阳能板,太阳能板覆盖于所述电推进系统外壳表面,不产生额外阻力,在工作中保持充电状态。供能系统与智能反馈增压系统、混合型推力器系统以及控制系统连接,为以上系统提供电源。为保证太阳能供给效率,应用该系统的卫星运行轨道限定为太阳同步轨道。
所述进气道在连续流气体环境中产生激波效应,对来流气体流进行压缩;在自由分子流气体环境中利用抛物线镜面反射聚焦效应,对来流气体粒子进行压缩;在过渡流态以上两种效应协同作用。初步压缩后的气体进入智能反馈增压系统内进行进一步增压,以保证在不同轨道大气环境中均能得到良好压缩效果。
所述分子泵的工作状态由压力计a进行负反馈调节。当压力计a连通气压不满足气泵的工作要求时,通过控制系统增大分子泵的功率以提高系统内的气体密度。一般而言,在大气环境为自由分子流态时,分子泵进行工作。
所述气泵的工作状态由压力计b进行负反馈调节。当压力计b连通的储箱气压未达到额定值时,通过控制系统控制气泵持续工作。且压力计b示数越小,反馈气泵工作功率越高,以达到保证储箱内工质能够满足任务需求的目的。
优选的,所述混合型推力器系统带有4个磁等离子体推力器以及3个离子推力器,其中在较低轨高流率环境中,启用磁等离子体推力器,其点火需求流率高,推力密度大;在较高轨低流率环境中,启用离子推力器,其点火需求流率低,推力密度较小,控制精度高。
优选的,所述抛物线型进气道的抛物线焦点位于进气道后端出口外。在自由分子流环境工作时,分子热运动速度远小于飞行器速度,来流分子可视为水平来流。由于抛物线的几何聚焦特性,在该进气道设计下粒子经过壁面镜面反射将会聚焦到抛物线的焦点,设计焦点位于后端出口外可以有效地提高进气道的进气效率,且效果显著。
优选的,所述进气道的壁面涂层为氟化镁等适用于含氧、高温环境的镜面涂层,以提高在较高轨道工作时稀薄大气自由分子流的进气效率。
优选的,所述混合型推力器系统中的导电部位使用金镀层,不需导电部位使用陶瓷材料;其他部位通气管道以及进气道均使用含镍、钼不锈钢材料。
优选的,所述供能系统中的太阳能板覆盖在除进气道入口面与混合型推力器系统出口面以外的其他面,即法线与飞行方向垂直的四个面,不因太阳能板产生额外的阻力。
优选的,所述电推进系统所应用卫星的星载设备均置于进气道、混合型推力器系统以及四个太阳能板所包括的六面体内部,卫星呈长条型以最小阻力工作。
优选的,所述混合型推力器系统中,7个推力器并联密集排列,其中的1个磁等离子体推力器位于中心点,其他3个磁等离子体推力器及3个离子推力器以正六边形的6个顶点为圆心交替排列。
优选的,所述混合型推力器系统中,7个电推力器前端各连接一个限流阀,通过控制系统分别对7个电推力器及其限流阀单独进行控制,以实现多种不同推力状态需求。
优选的,所述混合型推力器系统带有4个磁等离子体推力器以及3个离子推力器,对于特殊任务需求,在储箱工质充足的情况下两种推力器协同工作,推力器工作功率以及限流阀流率由控制系统进行控制,以达到各个推力器的推力精确可调的使用目的,并通过分别控制7个推力器的推力大小产生合力与力矩,以满足姿轨控制与阻力补偿等任务需求。
本发明的有益效果是:
1.本发明可以通过吸收大气为工质进行放电,产生推力,可使卫星在少量甚至不携带工质的情况下维持长期工作,以增加有效载荷,减小卫星发射以及运行成本;
2.本发明中的混合型推力器系统通过分别控制推力可以实现轨道变更、阻力补偿、姿态调整等功能,使卫星在工作轨道范围内根据任务需求灵活机动;
3.本发明提高了卫星在50km-250km范围超低轨道内工作的可行性,相较于其他高度轨道而言在超低轨道上工作的卫星具有更高的设备效率,能够满足更多的任务需求;
4.本发明的一个优势在于在超低轨道工作的卫星由于大气阻力的存在,将会在任务结束之后迅速坠入大气层进行解离,可以避免失效的卫星成为太空垃圾。
附图说明
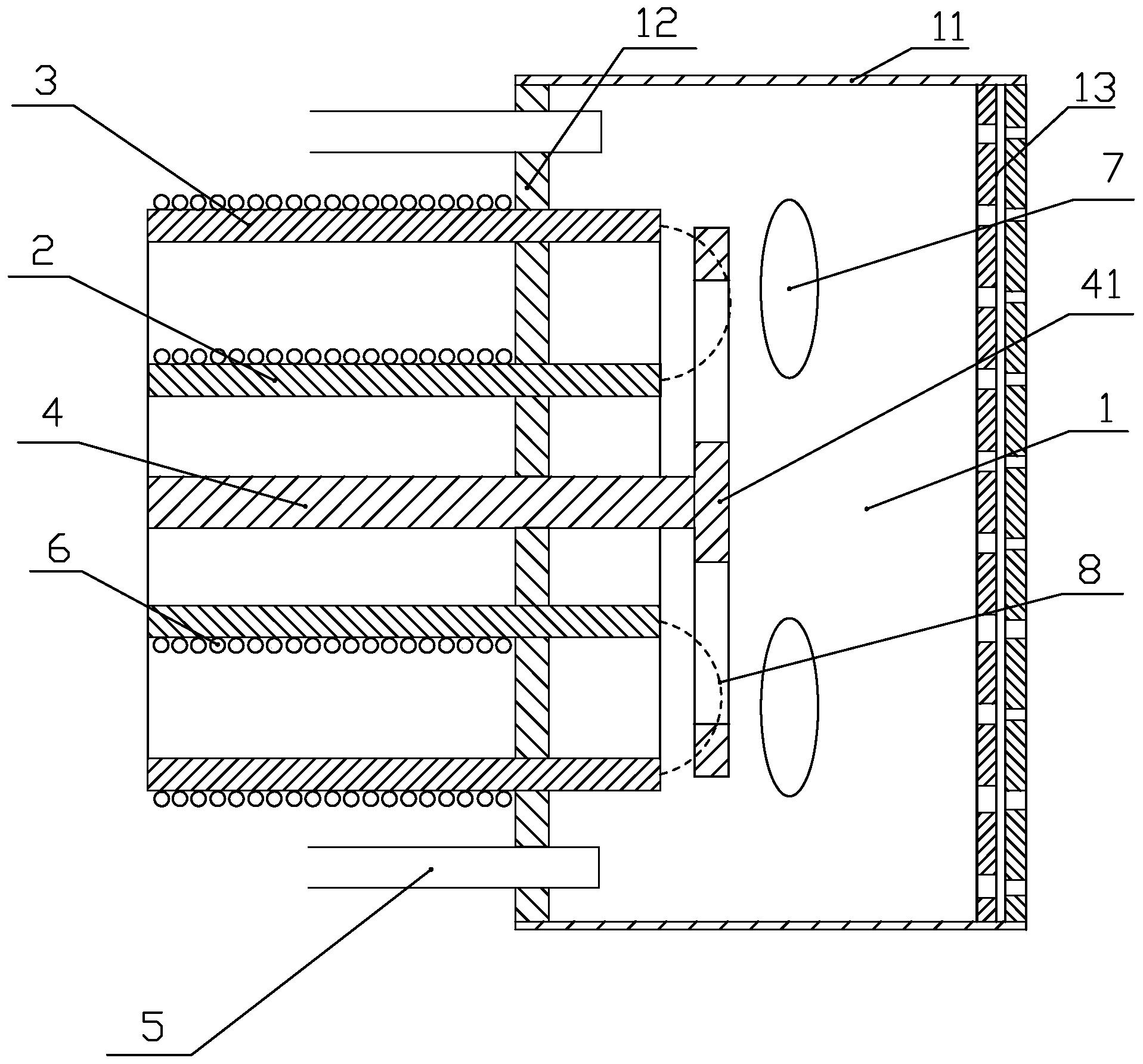
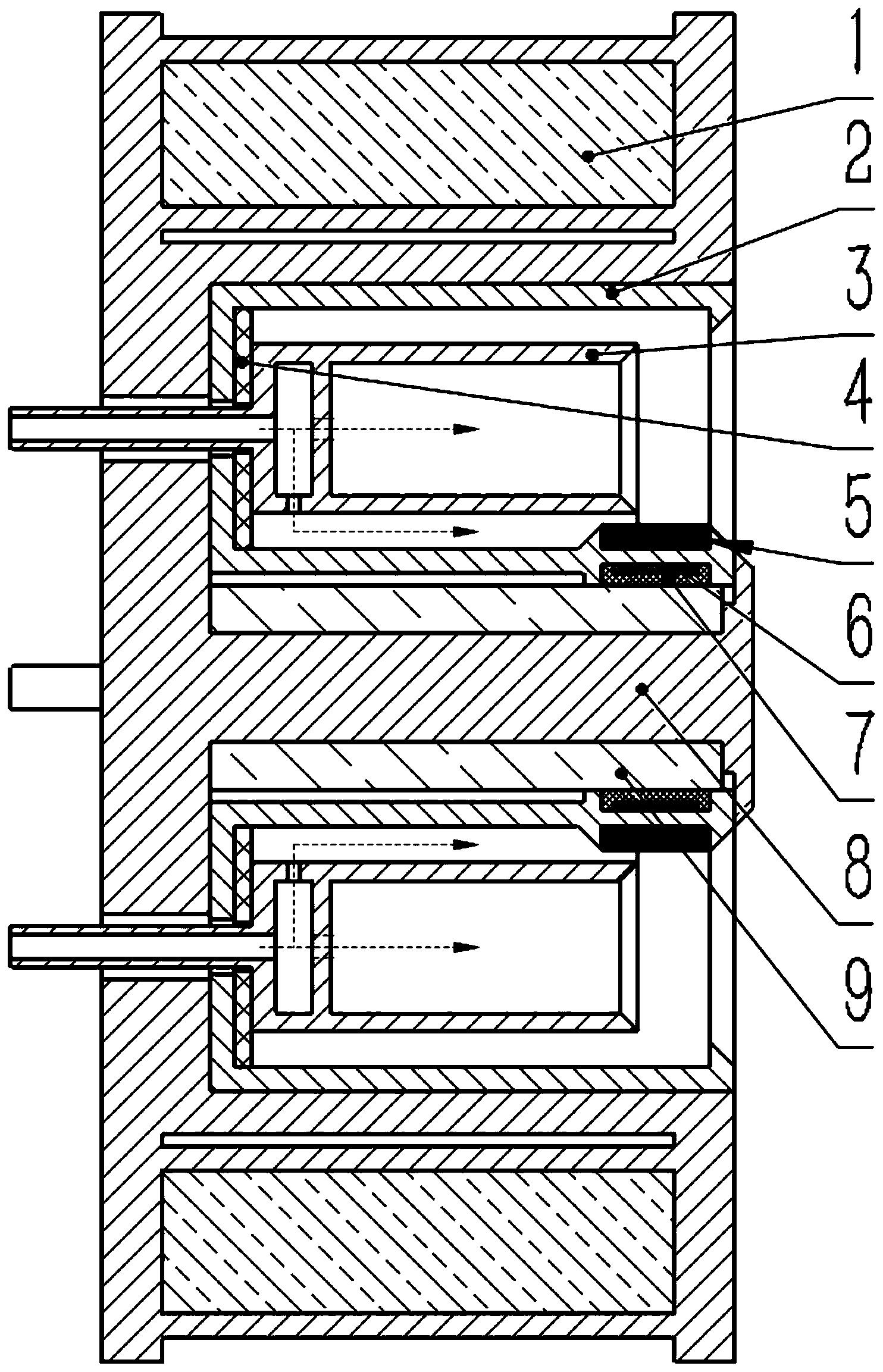
图1为系统结构图;
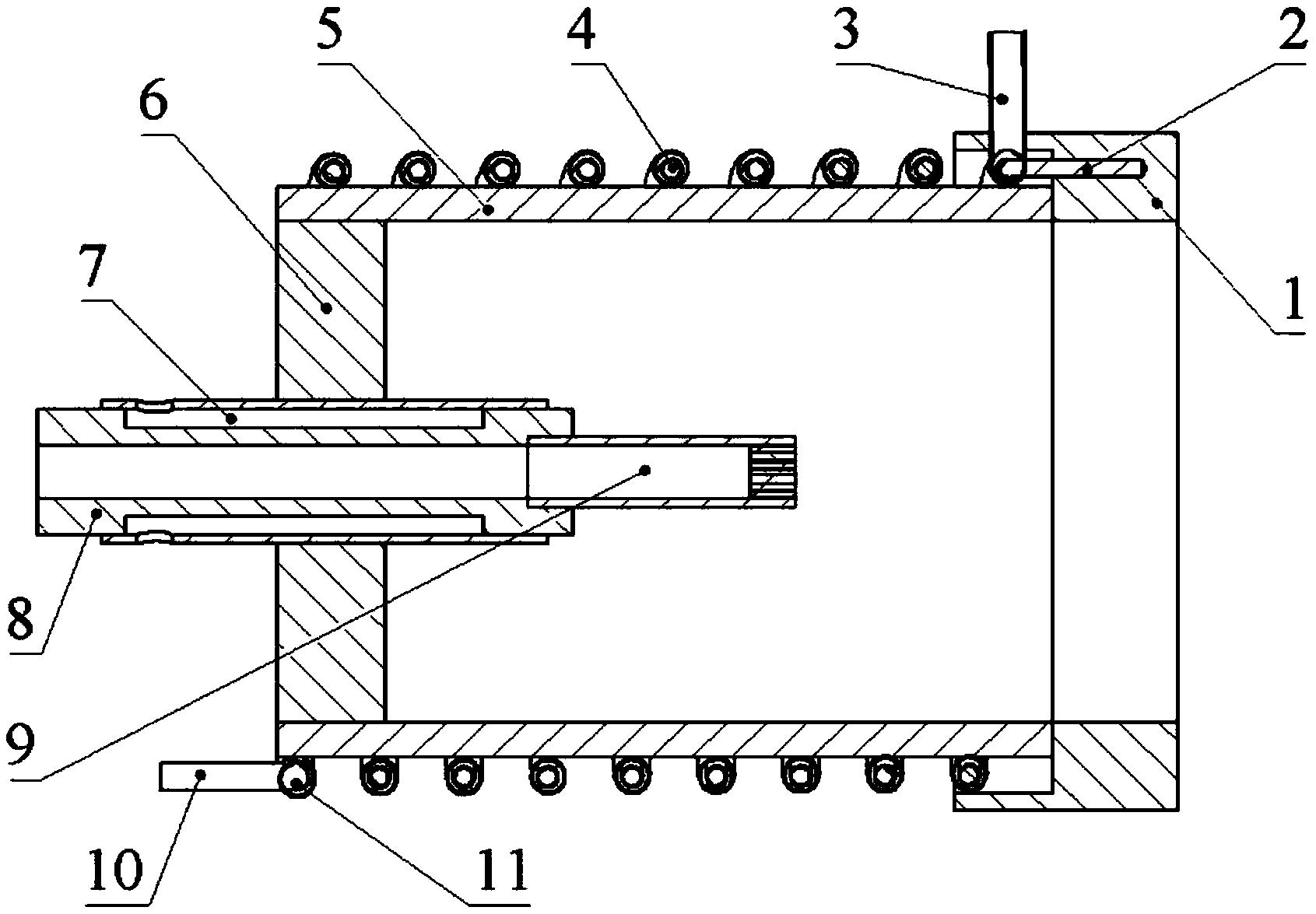
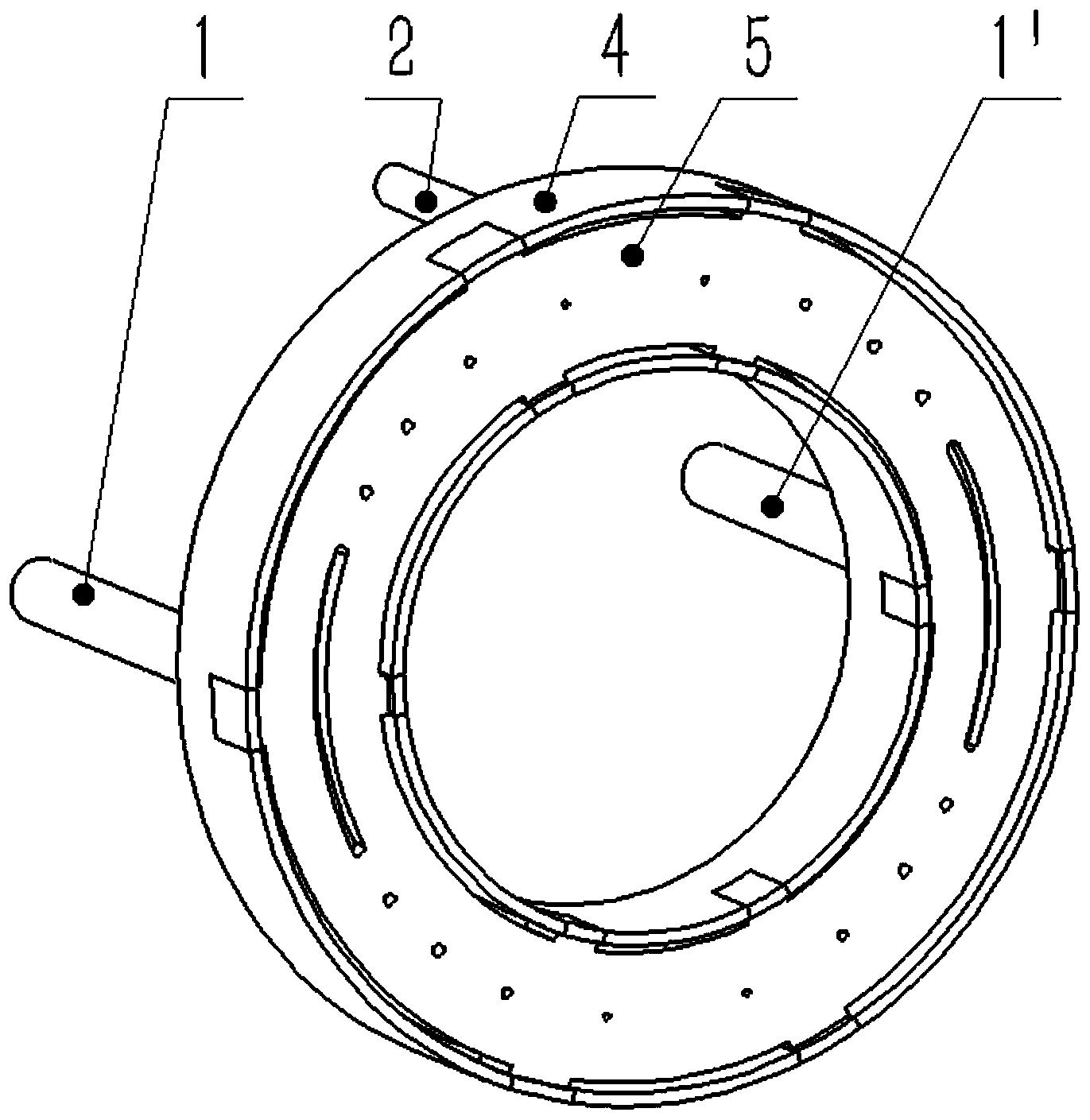
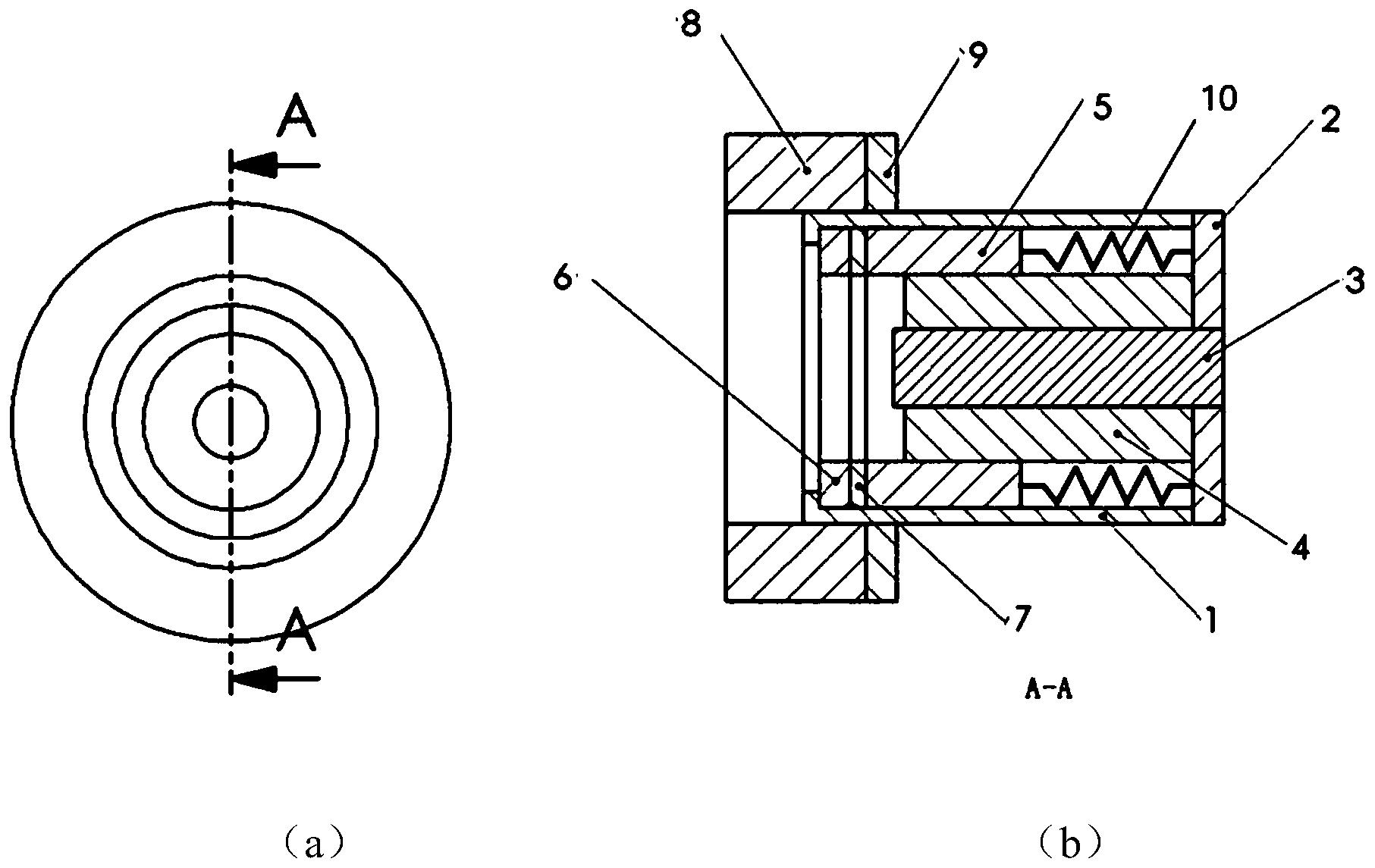
图2为智能反馈增压系统结构图;
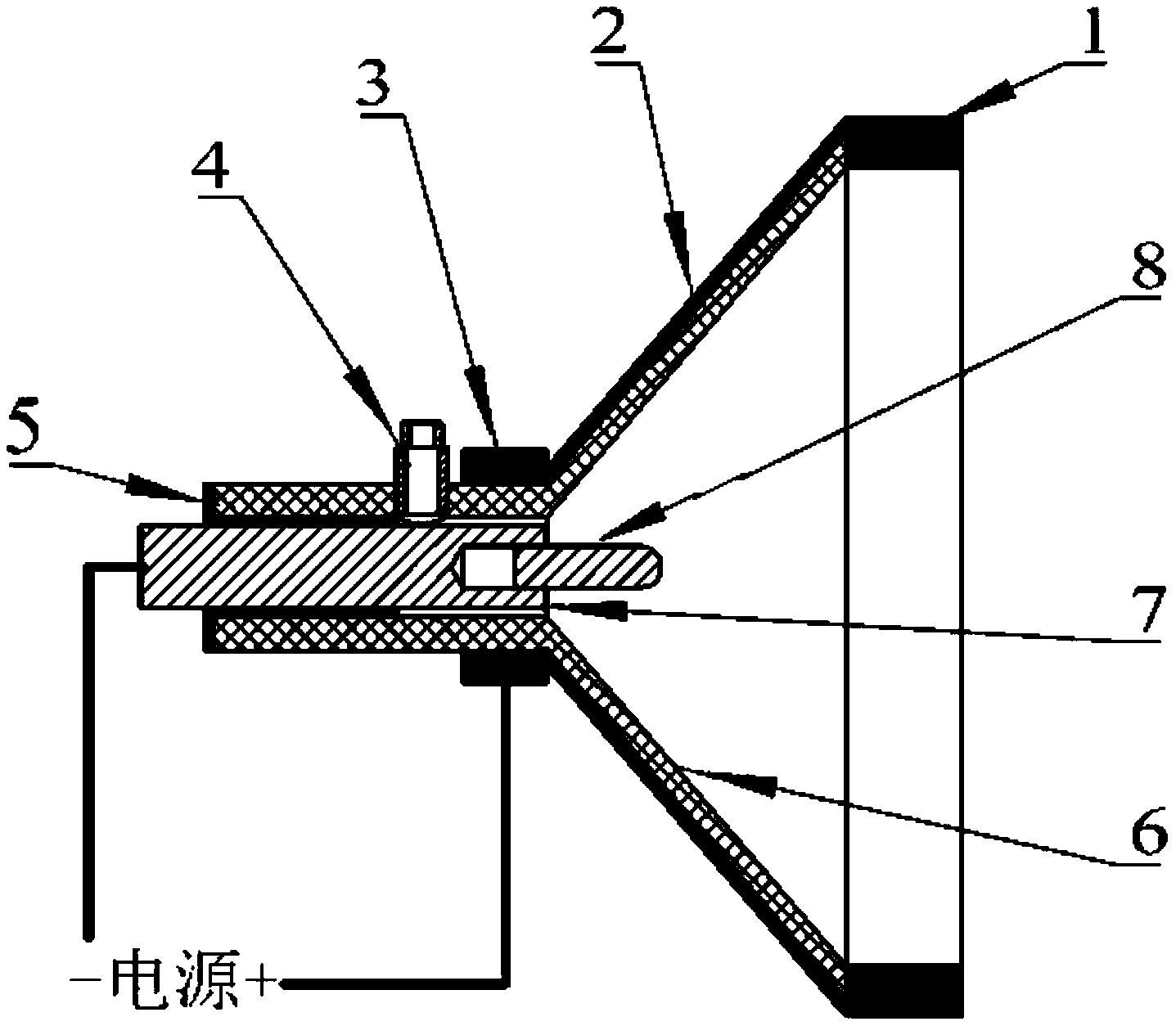
图3为自由分子流态下进气道工作原理图;
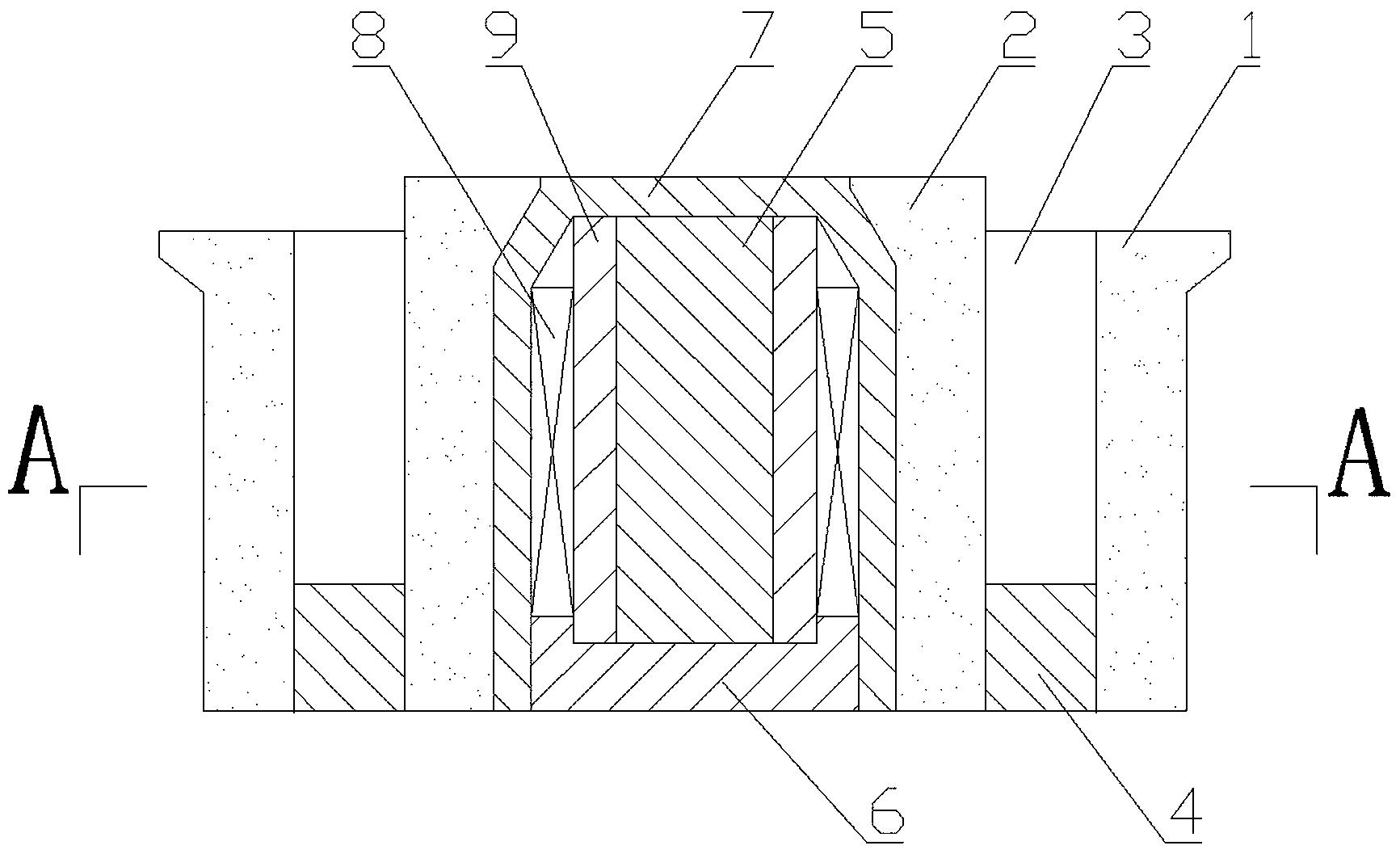
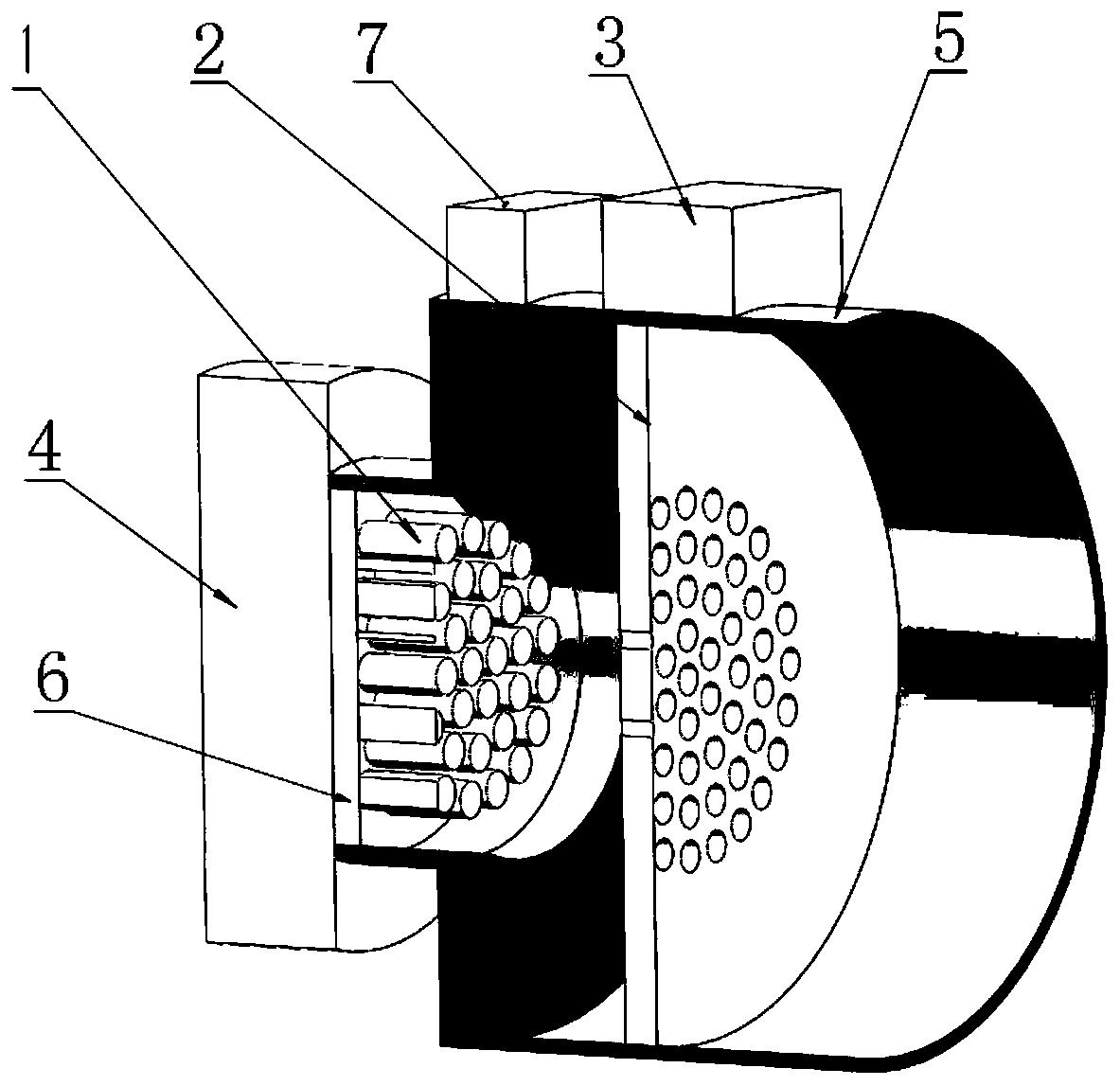
图4为混合型推力器系统结构图;
图5为太阳能板示意图。
附图标号说明:
1-进气道;2-智能反馈增压系统;3-太阳能板;4-混合型推力器系统;5-控制系统;21-分子泵;22-压力计a;23-气泵;24-压力计b;25-工质储箱;41、43、45、47-磁等离子体推力器;42、44、46-离子推力器。
具体实施方式
下面结合附图对本发明的内容做进一步细化说明。
本发明的应用背景为50km-250km范围高度的轨道,其中轨道较低部分大气为连续流态,轨道较高部分大气为自由分子流态,中间段大气为过渡流态。随着轨道增高,大气密度降低,分别对不同流态的工作模式进行介绍。
可应用于多流态的智能控制吸气式电推进系统,由进气道1、智能反馈增压系统2、混合型推力器系统4、控制系统5、供能系统组成。
所述进气道1构型为抛物线型,包括前端入口及后端出口,其中,前端入口为系统迎风部位,后端出口连接智能反馈增压系统2,所述进气道1用于对来流气体进行初步压缩。
所述智能反馈增压系统2包括泵体、压力计及工质储箱。
所述泵体包括一个适用于自由分子流的分子泵21以及一个适用于低压连续流的气泵23,按照来流顺序,分子泵21、气泵23、工质储箱25按顺序串联,分子泵21连接于进气道1后端出口,压力计a 22、压力计b 24分别设置于气泵23前端以及工质储箱25,与控制系统5相连,分别用于反馈调节分子泵21、气泵23的功率。
所述混合型推力器系统4包括7个电推力器与7个限流阀,控制系统5分别控制电推力器功率以及限流阀流率。
所述混合型推力器系统4的7个电推力器并联密集排列,其中41、43、45、47为磁等离子体推力器,42、44、46为离子推力器。
所述控制系统5带有无线信号接收装置以及有线信号输入端口,通过对无线遥控信号以及输入反馈信号进行处理,控制智能反馈增压系统2以及混合型推力器系统4的工作状态。
所述供能系统包括电池以及太阳能板3,太阳能板3覆盖于所述电推进系统外壳表面,不产生额外阻力,在工作中保持充电状态。供能系统与智能反馈增压系统2、混合型推力器系统4以及控制系统5连接,为以上系统提供电源。为保证太阳能供给效率,应用该系统的卫星运行轨道限定为太阳同步轨道。
所述进气道1在连续流气体环境中产生激波效应,对来流气体流进行压缩;在自由分子流气体环境中利用抛物线镜面反射聚焦效应,对来流气体粒子进行压缩;在过渡流态以上两种效应协同作用。初步压缩后的气体进入智能反馈增压系统2内进行进一步增压,以保证在不同轨道大气环境中均能得到良好压缩效果。
所述分子泵21的工作状态由压力计a 22进行负反馈调节。当压力计a 22连通气压不满足气泵23的工作要求时,通过控制系统5增大分子泵21的功率以提高系统内的气体密度。一般而言,在大气环境为自由分子流态时,分子泵进行工作。
所述气泵23的工作状态由压力计b 24进行负反馈调节。当压力计b 24连通的工质储箱25气压未达到额定值时,通过控制系统5控制气泵23持续工作。且压力计b 24示数越小,反馈气泵23工作功率越高,以达到保证储箱内工质能够满足任务需求的目的。一般而言,在系统运行全轨道范围气泵23持续工作。
优选的,所述混合型推力器系统带有4个磁等离子体推力器41、43、45、47以及3个离子推力器42、44、46,其中在较低轨高流率环境中,启用磁等离子体推力器41、43、45、47,其点火需求流率高,推力密度大;在较高轨低流率环境中,启用离子推力器42、44、46,其点火需求流率低,推力密度较小,控制精度高。
优选的,所述抛物线型进气道1的抛物线焦点位于进气道后端出口外。在自由分子流环境工作时,分子热运动速度远小于飞行器速度,来流分子可视为水平来流。由于抛物线的几何聚焦特性,在该进气道设计下粒子经过壁面镜面反射将会聚焦到抛物线的焦点,设计焦点位于后端出口外可以有效地提高进气道的进气效率,且效果显著。
优选的,所述进气道1的壁面涂层为氟化镁等适用于含氧、高温环境的镜面涂层,以提高在较高轨道工作时稀薄大气自由分子流的进气效率。
优选的,所述混合型推力器系统4中的导电部位使用金镀层,不需导电部位使用陶瓷材料;其他部位通气管道以及进气道1均使用含镍、钼不锈钢材料。
优选的,所述供能系统中的太阳能板3覆盖在除进气道1入口面与混合型推力器系统4出口面以外的其他面,即法线与飞行方向垂直的四个面,不因太阳能3板产生额外的阻力。
优选的,所述电推进系统所应用卫星的星载设备均置于进气道1、混合型推力器系统4以及四个太阳能板3所包括的六面体内部,卫星呈长条型以最小阻力工作。
优选的,所述混合型推力器系统4中,7个推力器并联密集排列,其中磁等离子体推力器41位于中心点,其他3个磁等离子体推力器43、45、47及3个离子推力器42、44、46以正六边形的6个顶点为圆心交替排列。
优选的,所述混合型推力器系统4中,7个电推力器前端各连接一个限流阀,通过控制系统5分别对7个电推力器及其限流阀单独进行控制,以实现多种不同推力状态需求。
优选的,所述混合型推力器系统4带有4个磁等离子体推力器41、43、45、47以及3个离子推力器42、44、46,对于特殊任务需求,在储箱工质充足的情况下两种推力器协同工作,推力器工作功率以及限流阀流率由控制系统进行控制,以达到各个推力器的推力精确可调的使用目的,并通过分别控制7个推力器的推力大小产生合力与力矩,以满足姿轨控制与阻力补偿等任务需求。
上述对实施例的描述是为便于本技术领域的普通技术人员能理解和应用本发明。熟悉本领域技术的人员显然可以容易地对上述实施例做出各种修改,并把在此说明的一般原理应用到其他实施例中而不必经过创造性的劳动。因此,本发明不限于上述实施例,本领域技术人员根据本发明的揭示,对于本发明做出的改进和修改都应该在本发明的保护范围之内。
可应用于多流态的智能控制吸气式电推进系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0