









专利摘要
一种基于声光效应的高精度海水声速测量方法,包括:调整测量光路与参考光路时,在两束光前端尽量远的地方放置一可调俯仰偏摆的反射镜,调整反射镜使得参考光路与反射镜垂直,在参考光路的前进端放置一小孔光阑,确保经反射镜反射回来的光通过同一光阑;调整超声探头的位置,使超声垂直飞过参考光路,由所得的衍射光强与原基底光强之比求超声在参考光路处的声压,根据超声在水中的衰减系数求出测量光路处的声压,反算出测量光路处的光强比,调整超声探头的位置;将两束从水槽中射出的发生声光效应的平行光进行合束,在第二偏振分束立方的两侧分别用第一光电探测器、第二光电探测器接收光信号并转换为电信号后由频率计数器、示波器获取飞行距离信息与时间信息。
权利要求
1.一种基于声光效应的高精度海水声速测量方法,其特征在于,所述测量方法包括以下步骤:
对红外光源通过电光调制器调制后,依次通过掺饵光纤放大器、倍频晶体、第一1/2波片、第一偏振分束立方,并经第一反射镜反射后,确保两束光平行等高进入水槽中,开启脉冲发生器,激发脉冲超声;
调整测量光路与参考光路时,在两束光前端尽量远的地方放置一可调俯仰偏摆的反射镜,调整反射镜使得参考光路与反射镜垂直,即在参考光路的前进端放置一小孔光阑,确保经反射镜反射回来的光通过同一光阑;
调整超声探头的位置,使得超声垂直飞过参考光路,由所得的衍射光强与原基底光强之比,求出超声在参考光路处的声压,根据超声在水中的衰减系数求出测量光路处的声压,再反算出测量光路处的光强比,调整超声探头的位置;
将两束从水槽中射出的发生声光效应的平行光进行合束,在第二偏振分束立方的两侧分别用第一光电探测器、第二光电探测器接收光信号并转换为电信号后由频率计数器、示波器获取飞行距离信息与时间信息。
2.根据权利要求1所述的一种基于声光效应的高精度海水声速测量方法,其特征在于,所述测量方法包括:将从水槽中射出的发生声光效应的测量光路经第二反射镜反射后与同样发生声光效应的测量光路在第二偏振分束立方处进行合束,在第二偏振分束立方的两侧分别用第一光电探测器、第二光电探测器接收光信号并转换为电信号后由频率计数器、示波器接收。
3.根据权利要求1所述的一种基于声光效应的高精度海水声速测量方法,其特征在于,所述测量方法包括:
调节第一1/2波片使得入射光处于特定偏振方向的光透过,然后调节第二1/2波片,使其与第一1/2波片处于同一状态,最后调节第三1/2波片,使其通过光的偏振方向与第一1/2波片和第二1/2波片透过光的偏振方向垂直,则使得只有参考光路通过;
记下示波器的时间示数,同时开启信号发生器,使得其输出频率与红外光源的调制频率相同,记录下频率计数器显示的信号发生器与参考光路的相位差。
4.根据权利要求1所述的一种基于声光效应的高精度海水声速测量方法,其特征在于,所述测量方法包括:
调节第一1/2波片,使得入射光处于特定偏振方向的光透过,然后调节第三1/2波片,使其与第一1/2波片处于同一状态,最后调节第二1/2波片,使其通过光的偏振方向与第一1/2波片和第二1/2波片透过光的偏振方向垂直,则使得只有测量光路通过,记下示波器的时间示数与频率计数器显示的信号发生器与测量光路的相位差。
说明书
技术领域
本发明涉及基于海水声速测量领域,尤其涉及一种基于声光效应的高精度海水声速测量方法。
背景技术
具体来讲,对于海水进行声速测量,一般主要包括两类方法,一类是通过测量超声波在固定距离内飞行时间或者测量超声波波长和频率的直接测量法;一类是通过海水温度、盐度、深度参数测量的间接测量方法。间接测量方法主要是依据已有的模型公式进行计算,但往往存在较大的误差。相比较而言,直接测量方法在原理上涉及参量较少(只包括时间和距离,或频率与波长),测量精度较高。
目前市面上常规的声速剖面仪主要是依据直接测量方法设计,即测量飞行距离与相应的飞行时间从而获得海水声速值。但在时间参量的测量上,常规声速剖面仪超声发射与接收由于压电效应会产生一定时间延误,为了得到较高的声速测量精度,通常测量声波需要在已知的距离内往返飞行多次,即用接收到的反射回拨去触发电路,再发射下一个脉冲,如此不断的循环下去,这样就导致了一个误差累计效应,不能保证时间测量的高精度。
在距离参量的测量上,因超声探头嵌入距离参量中,保证超声波行进距离与标定距离严格一致较为困难,同样难以保证测量的准确性;市面上同时存在超声飞行距离已经标定好的声速剖面仪,但由于仪器使用环境较为复杂,标定距离很难一直保证精度。
发明内容
本发明提供了一种基于声光效应的海水声速高精度测量方法,本发明以红外激光声光效应为基本原理对海水声速剖面进行检测,目的在于实现高精度、高稳定性的声速测量,详见下文描述:
一种基于声光效应的高精度海水声速测量方法,所述测量方法包括以下步骤:
对红外光源通过电光调制器调制后,依次通过掺饵光纤放大器、倍频晶体、第一1/2波片、第一偏振分束立方,并经第一反射镜反射后,确保两束光平行等高进入水槽中,开启脉冲发生器,激发脉冲超声;
调整测量光路与参考光路时,在两束光前端尽量远的地方放置一可调俯仰偏摆的反射镜,调整反射镜使得参考光路与反射镜垂直,即在参考光路的前进端放置一小孔光阑,确保经反射镜反射回来的光通过同一光阑;
调整超声探头的位置,使得超声垂直飞过参考光路,由所得的衍射光强与原基底光强之比,求出超声在参考光路处的声压,根据超声在水中的衰减系数求出测量光路处的声压,再反算出测量光路处的光强比,调整超声探头的位置;
将两束从水槽中射出的发生声光效应的平行光进行合束,在第二偏振分束立方的两侧分别用第一光电探测器、第二光电探测器接收光信号并转换为电信号后由频率计数器、示波器获取飞行距离信息与时间信息。
所述测量方法包括:将从水槽中射出的发生声光效应的测量光路经第二反射镜反射后与同样发生声光效应的测量光路在第二偏振分束立方处进行合束,在第二偏振分束立方的两侧分别用第一光电探测器、第二光电探测器接收光信号并转换为电信号后由频率计数器、示波器接收。
所述测量方法包括:
调节第一1/2波片使得入射光处于特定偏振方向的光透过,然后调节第二1/2波片,使其与第一1/2波片处于同一状态,最后调节第三1/2波片,使其通过光的偏振方向与第一1/2波片和第二1/2波片透过光的偏振方向垂直,则使得只有参考光路通过;
记下示波器的时间示数,同时开启信号发生器,使得其输出频率与红外光源的调制频率相同,记录下频率计数器显示的信号发生器与参考光路的相位差。
所述测量方法包括:
调节第一1/2波片,使得入射光处于特定偏振方向的光透过,然后调节第三1/2波片,使其与第一1/2波片处于同一状态,最后调节第二1/2波片,使其通过光的偏振方向与第一1/2波片和第二1/2波片透过光的偏振方向垂直,则使得只有测量光路通过,记下示波器的时间示数与频率计数器显示的信号发生器与测量光路的相位差。
本发明提供的技术方案的有益效果是:
1、本方法解决了海水声速直接测量法中距离测量与标定的问题,同时也解决了时间测量精度的问题;
2、本方法可将海水声速测量精度提升一个数量级,实现了高精度、高稳定性、快速的声速剖面测量;
2、本方法同时也将在水文地质、反潜、电缆铺设和地质调查、采矿、地球物理探测、声学系统、声层析、水体微结构分析、水文水道测量、海洋调查勘察以及国防应用上发挥重要的直接或间接作用,为相关领域作业任务提供高精度数据保障。
附图说明
附图中,各标号所代表的部件列表如下:
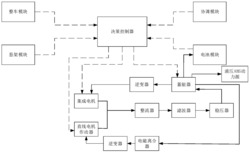
图1为一种基于声光效应的高精度海水声速测量方法流程图;
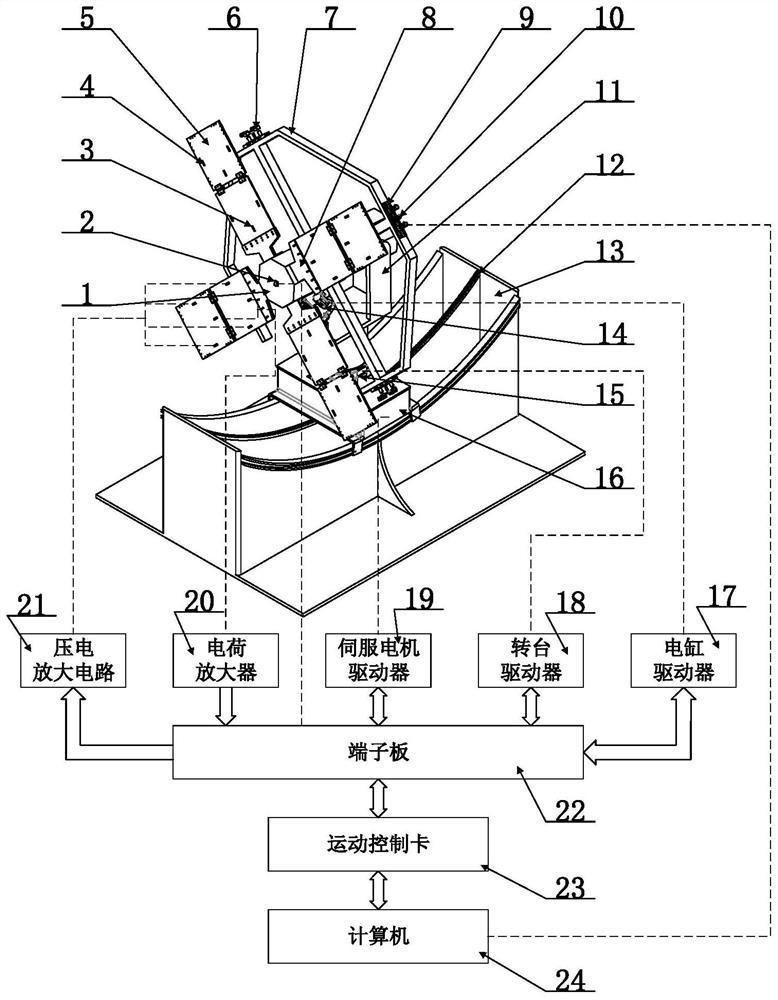
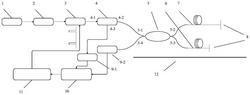
图2为一种基于声光效应的高精度海水声速测量方法的光路图。
附图中,各标号所代表的部件列表如下:
1:红外光源;2:电光调制器;
3:掺铒光纤光功率放大器;4:倍频晶体;
5:第一1/2波片;6:第一偏振分束立方;
7:第一反射镜;8:超声探头;
9:水槽;10:第二1/2波片;
11:第三1/2波片;12:第二偏振分束立方;
13:第二反射镜;14:第一光电探测器;
15:频率计数器;16:第二光电探测器;
17:示波器;18:脉冲发生器;
19:测量光路;20:参考光路;
21:信号发生器;22:反射镜;
23:第一小孔光阑;24:第二小孔光阑。
其中,第一1/2波片5、第二1/2波片10和第三1/2波片的型号均相同,均为Thorlabs,WPH10E-780;
第一偏振分束立方6和第二偏振分束立方12型号均相同,均为Thorlabs,PBS252;
第一反射镜7和第二反射镜13的型号均相同,均为Thorlabs,PF10-03-P01;
第一小孔观澜23与第二小孔光阑24的型号均相同,均为Thorlabs,SM1D12;
红外光源1的型号为NP Photonics,1560nm;掺铒光纤光功率放大器3的型号为YM,GA81;
超声探头8的型号为Olympus,V3337;第一光电探测器14的型号为Thorlabs,FPD310-FV;第二光电探测器16的型号为Thorlabs,APD430A/M;频率计数器15的型号为Keysight,53230A;
示波器17的型号为Tektronix,MDO3104;脉冲发生器18的型号为Olympus,5073PR;信号发生器21的型号为Rigol,DG4162。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面对本发明实施方式作进一步地详细描述。
声光效应是由于,超声波通过介质时会造成介质的局部压缩和伸长而产生弹性应变,该弹性应变随时间和空间作周期性变化,使介质出现疏密相间的现象,折射率同时发生周期性变化,如同一个相位光栅,我们称之为超声光栅。
当光通过这一受到超声波扰动的介质即超声光栅时就会发生衍射现象,由于本发明实施例中所用超声是脉冲超声,频率固定,故超声光栅不会一直存在即衍射不是一直发生,又由于发生衍射时零级光强相比于入射光强会发生明显减弱,所以当有超声飞过光束区域时,在示波器上探测的合束光强信号会出现明显凹陷,两个凹陷之间的时间差就是超声飞过两束光所需的时间。
两束平行光虽然发射时携带相同的相位信息,但由于光程不同,最后探测时两束光所携带的相位信息也会有很大差异,读取相位之间的差值就能获取距离信息。
实施例1
本发明实施例介绍了一种利用声光的快速、且分辨率高的良好性质,以声光效应为基本原理对海水声速剖面进行检测的新方法,目的在于实现高精度、高稳定度、快速的海水声速剖面测量,参见图1、图2,该方法包括以下步骤:
101:用电光调制器(EOM)2对红外光源1进行强度调制,光由红外光源1发出后直接接入电光调制器(EOM)2中;
其中,对红外光源1进行调制主要是为了避免在采用相位法测距过程中存在的距离模糊问题,即测相位时,如果调制信号只有一个固定的频率,不论采用哪种相位差测量方法,都只能测量出不足2π的那部分相位差,而实际相位差中含有的整周期数无法获得。
为了解决距离模糊的问题,一个简单的方法是让调制信号的波长大于待测距离,在对红外光源1进行调制后可以获得满足测量要求的调制信号的波长。
102:对红外光源1进行调制后,如图2所示将其依次通过掺饵光纤放大器(EDFA)3、倍频晶体4、分光棱镜5、反射镜7后,确保两束光平行等高进入水槽9中,开启脉冲发生器18,激发脉冲超声;
其中,经多次实验,水对红外光源1发出的1560nm的光具有强吸收作用,故要将其倍频处理,倍频所需光具有较大功率才能使得倍频晶体4发挥作用,故需要将调制光依次通过掺饵光纤放大器(EDFA)3与倍频晶体4。
确保两束光平行等高是实现高精度测量海水声速剖面的重要前提。根据测量光路19与参考光路20的相位差求出两光路的光程差后,只有确保两束光平行等高,两束光之间光程差的一半才为超声垂直飞过两束光时飞行的距离。
调整测量光路19与参考光路20时,要在两束光前端尽量远的地方放置一可调俯仰偏摆的反射镜22,调整反射镜22使得参考光路20与反射镜22垂直,即在参考光路20的前进端放置第一小孔光阑24,确保经反射镜22反射回来的光通过第一光阑24;调整反射镜7,使得测量光路19与反射镜22垂直,即确保经反射镜22反射回来的光通过第二光阑23
103:调整超声探头8的位置,确保超声垂直飞过两平行光束。
其中,只有超声垂直飞过两平行光束才能保证两束光之间的距离即为超声飞行的距离,再加上由声光效应获取相应距离的飞行时间,才能准确获取海水声速值。
调整超声垂直飞过参考光路20,由所得的衍射光强与原基底光强之比,根据相关算式求出超声在参考光路20处的声压,而后根据超声在水中的衰减系数求出测量光路20处的声压,再由相关算式反算出测量光路20处的光强比,调整超声探头8的位置。
104:将两束从水槽9中射出的发生声光效应的平行光进行合束,如图2所示,在第二偏振分束立方12的两侧分别用第一光电探测器14、第二光电探测器16接收光信号并转换为电信号后由频率计数器15、示波器17获取飞行距离信息与时间信息。
综上所述,本发明实施例以声光效应为基本原理对海水声速剖面进行检测,实现了高精度、高稳定度、快速的声速测量。
实施例2
下面结合图1、图2对本发明实施例提供的海水声速剖面测量具体实施方法进行详细说明。
本发明实施例是基于声光效应的,光路设计如图2所示。测量步骤如下:
步骤201:如图2所示,将红外光源1发出的光直接接入电光调制器2,获得调制光源;
步骤202:如图2所示,调节光路,使得调制后的光源依次通过掺饵光纤放大器(EDFA)3、倍频晶体4、第一1/2波片5、第一偏振分束立方6,并经第一反射镜7反射后可以变为两平行光路射入水槽9中;
步骤203:启动脉冲发生器18激发脉冲超声,调节超声探头8,确保超声垂直飞过两平行光;
步骤204:将从水槽9中射出的发生声光效应的测量光路19经第二反射镜13反射后与同样发生声光效应的测量光路20在第二偏振分束立方12处进行合束,如图2所示,在第二偏振分束立方12的两侧分别用第一光电探测器14、第二光电探测器16接收光信号并转换为电信号后由频率计数器15、示波器17接收;
步骤205:首先调节第一1/2波片5,使得入射光处于特定偏振方向的光透过,然后调节第二1/2波片10,使其与第一1/2波片5处于同一状态,最后调节第三1/2波片11,使其通过光的偏振方向与第一1/2波片5和第二1/2波片10透过光的偏振方向垂直,则使得只有参考光路20通过,记下示波器17的时间示数t1,同时开启信号发生器21,使得其输出频率与红外光源1的调制频率相同,记录下频率计数器15显示的信号发生器21与参考光路20的相位差φ1;
步骤206:首先调节第一1/2波片5,使得入射光处于特定偏振方向的光透过,然后调节第三1/2波片11,使其与第一1/2波片5处于同一状态,最后调节第二1/2波片10,使其通过光的偏振方向与第一1/2波片5和第二1/2波片11透过光的偏振方向垂直,则使得只有测量光路19通过,记下示波器17的时间示数t2与频率计数器15显示的信号发生器21与测量光路19的相位差φ2;
步骤207:设调制频率为f1,则调制光源的波长为λ=c/f1,最后获得声速测量值v为。
其中, t为t2-t1。
综上所述,本发明实施例以红外激光声光效应为基本原理对海水声速剖面进行检测,实现了高精度、高稳定性、快速的声速测量;本方法将在海洋标准场等类似建设工作上发挥积极作用,以其直接现场高精度测量优势替换掉传统海水声速测量方法,将测量精度大幅提升,为类似于海洋标准场建设贡献力量。
本发明实施例对各器件的型号除做特殊说明的以外,其他器件的型号不做限制,只要能完成上述功能的器件均可。
本领域技术人员可以理解附图只是一个优选实施例的示意图,上述本发明实施例序号仅仅为了描述,不代表实施例的优劣。
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
一种基于声光效应的高精度海水声速测量方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0