











专利摘要
本发明涉及光学领域,尤其涉及一种使用全天候大气相干长度测量系统的方法,该系统包括大气相干长度仪、用于支撑大气相干长度仪的底座、使大气相干长度仪相对于底座水平转动和俯仰转动的驱动组件、控制模块;所述大气相干长度仪包括壳体和设置在壳体内的望远镜、相机、GPS测量部件,所述相机设置在望远镜的成像位置,且相机位置通过内部的调焦机构与壳体连接;所述控制模块与驱动组件的受控端、调焦机构的受控端、大气相干长度仪的数据采集端和数据输入端对应连接。本发明的优点在于:通过对星星的测量,从而实现24小时全天候测量大气相干长度,并且利用星光自身的亮度,从而不需要光源,并且通过控制模块来实现自动控制,且不需要调平,使用简单。
权利要求
1.一种全天候大气相干长度测量系统,其特征在于,包括大气相干长度仪、用于支撑大气相干长度仪的底座(5)、使大气相干长度仪相对于底座(5)水平转动和俯仰转动的驱动组件、控制模块;所述大气相干长度仪包括壳体和设置在壳体内的望远镜(1)、相机(2)、GPS测量部件,所述相机(2)设置在望远镜(1)的成像位置,且相机(2)位置通过内部的调焦机构(3)与壳体连接;所述控制模块与驱动组件的受控端、调焦机构(3)的受控端、大气相干长度仪的数据采集端和数据输入端对应连接。
2.根据权利要求1所述的一种全天候大气相干长度测量系统,其特征在于,所述驱动组件包括U型支架(4),所述壳体水平方向的两侧分别于U型支架(4)两竖向部分的内侧对应转动连接,U型支架(4)的竖向部分的内部还设置作为控制模块的控制电路(7)。
3.根据权利要求1所述的一种全天候大气相干长度测量系统,其特征在于,所述相机(2)为高速智能相机。
4.使用权利要求1-3任意一项所述的一种全天候大气相干长度测量系统的方法,其特征在于,包括以下步骤:
S1、系统上电,驱动组件驱动大气相干长度仪为初始位置;控制模块将相机(2)曝光参数从大气相干长度仪的数据输入端配置到相机(2)内;控制模块从数据采集端获取系统信息;
S2、控制模块调取内部存储的星图信息,根据系统信息,在星图信息上选择大气相干长度仪俯仰角在设定范围内亮度最高的星星,并确定该星星位置;控制模块计算大气相干长度仪角度信息,使成像位置位于相机(2)的中心;
S3、所述星星在相机(2)内获得两个光斑,判断两个质心位置之间的距离是否超出设定值,当超过设定值时,控制模块控制调焦机构(3)进行调焦;
S4、控制模块根据星图信息确定所述星星的运行轨迹,并通过控制驱动组件使大气相干长度仪按照运动轨迹运动,在按照运动轨迹运动过程中,控制模块获取相机(2)计算出成像的质心位置,然后控制模块计算出对应的相干长度;
S5、控制模块将相干长度和其对应的系统信息、角度信息、星星类型进行存储;
S6、控制模块根据星图信息确定所述星星的运行轨迹,并通过控制驱动组件使大气相干长度仪按照运动轨迹运动;
S7、当所述大气相干长度仪角度小于步骤S2中的设定范围时,控制模块根据此时的系统信息在星图信息上重新选择大气相干长度仪角度在设定范围内亮度最高的星星,并确定该星星位置;控制模块计算大气相干长度仪角度,在该步骤中的选取的星星的光在相机(2)的中心成像,返回步骤S4。
5.根据权利要求4所述的方法,其特征在于,步骤S2中控制模块计算大气相干长度仪水平转角和俯仰角度,使成像位置位于相机(2)的中心,具体包括以下步骤:
S21、控制模块先通过计算大气相干长度仪水平转角和俯仰角度控制驱动组件,使大气相干长度仪的望远镜(1)初步瞄准所述星星;
S22、所述星星入射到望远镜(1)内的光经过系统成像,根据成像后的光斑在相机(2)内的位置,控制模块控制驱动组件使大气相干长度仪的望远镜(1)精确瞄准所述星星,直至成像位置位于相机(2)的中心。
6.根据权利要求4所述的方法,其特征在于,所述步骤S2中的俯仰角的设定范围为不小于30度。
7.根据权利要求4所述的方法,其特征在于,所述步骤S3中的两质心之间的距离的设定值为300像素,允许误差为20像素。
8.根据权利要求4所述的方法,其特征在于,所述步骤S3中两个光斑的质心位置计算是通过相机(2)自行计算,质心的计算公式为 其中,x,y为坐标值,I(x),I(y)为x,y方向的光强。
9.根据权利要求4所述的方法,其特征在于,所述角度信息包括水平转角和俯仰角度,在步骤S1中的初始位置是水平转角和俯仰角度均为0度。
10.根据权利要求4所述的方法,其特征在于,所述系统信息包括所处位置的GPS信息和对应的时间信息。
说明书
技术领域
本发明涉及光学领域,尤其涉及一种全天候大气相干长度测量系统及方法。
背景技术
光在湍流大气中传输时,由于大气中折射率起伏导致光波阵面畸变,引起光束漂移、光斑扩展和光强起伏等湍流效应,描述湍流效应时,广泛使用的参数为大气相干长度,大气相干长度描述了传输路径上的综合湍流强度,是用于激光大气传输和自适应光学研究的重要参量。
为了研究全天候的激光传输特性,并且为了实现自动化,则需要可以在24小时自动测量大气相干长度的系统和方法。
发明内容
为了克服小时自动测量大气相干长度现有技术中还没有系统或方法来实现24,为此,本发明提供一种全天候大气相干长度测量系统及方法。
为实现上述目的,本发明采用以下技术方案:
一种全天候大气相干长度测量系统,包括大气相干长度仪、用于支撑大气相干长度仪的底座、使大气相干长度仪相对于底座水平转动和俯仰转动的驱动组件、控制模块;所述大气相干长度仪包括壳体和设置在壳体内的望远镜、相机、GPS测量部件,所述相机设置在望远镜的成像位置,且相机位置通过内部的调焦机构与壳体连接;所述控制模块与驱动组件的受控端、调焦机构的受控端、大气相干长度仪的数据采集端和数据输入端对应连接。
优化的,所述驱动组件包括U型支架,所述壳体水平方向的两侧分别于U型支架两竖向部分的内侧对应转动连接,U型支架的竖向部分的内部还设置作为控制模块的控制电路。
优化的,所述相机为高速智能相机。
使用上述的一种全天候大气相干长度测量系统的方法,包括以下步骤:
S1、系统上电,驱动组件驱动大气相干长度仪为初始位置;控制模块将相机曝光参数从大气相干长度仪的数据输入端配置到相机内;控制模块从数据采集端获取系统信息;
S2、控制模块调取内部存储的星图信息,根据系统信息,在星图信息上选择大气相干长度仪俯仰角在设定范围内亮度最高的星星,并确定该星星位置;控制模块计算大气相干长度仪角度信息,使成像位置位于相机的中心;
S3、所述星星在相机内获得两个光斑,判断两个质心位置之间的距离是否超出设定值,当超过设定值时,控制模块控制调焦机构进行调焦;
S4、控制模块根据星图信息确定所述星星的运行轨迹,并通过控制驱动组件使大气相干长度仪按照运动轨迹运动,在按照运动轨迹运动过程中,控制模块获取相机计算出成像的质心位置,然后控制模块计算出对应的相干长度;
S5、控制模块将相干长度和其对应的系统信息、角度信息、星星类型进行存储;
S6、控制模块根据星图信息确定所述星星的运行轨迹,并通过控制驱动组件使大气相干长度仪按照运动轨迹运动;
S7、当所述大气相干长度仪角度小于步骤S2中的设定范围时,控制模块根据此时的系统信息在星图信息上重新选择大气相干长度仪角度在设定范围内亮度最高的星星,并确定该星星位置;控制模块计算大气相干长度仪角度,在该步骤中的选取的星星的光在相机的中心成像,返回步骤S4。
具体地说,步骤S2中控制模块计算大气相干长度仪水平转角和俯仰角度,使成像位置位于相机的中心,具体包括以下步骤:
S21、控制模块先通过计算大气相干长度仪水平转角和俯仰角度控制驱动组件,使大气相干长度仪的望远镜初步瞄准所述星星;
S22、所述星星入射到望远镜内的光经过系统成像,根据成像后的光斑在相机内的位置,控制模块控制驱动组件使大气相干长度仪的望远镜精确瞄准所述星星,直至成像位置位于相机的中心。
具体地说,所述步骤S2中的俯仰角的设定范围为不小于30度。
具体地说,所述步骤S3中的两质心之间的距离的设定值为300像素,允许误差为20像素。
具体地说,所述步骤S3中两个光斑的质心位置计算是通过相机自行计算,质心的计算公式为 其中,x,y为坐标值,I(x),I(y)为x,y方向的光强。
具体地说,所述角度信息包括水平转角和俯仰角度,在步骤S1中的初始位置是水平转角和俯仰角度均为0度。
具体地说,所述系统信息包括所处位置的GPS信息和对应的时间信息。
本发明的优点在于:
(1)本发明通过对星星的测量,从而实现24小时全天候测量大气相干长度,并且利用星光自身的亮度,从而不需要光源,并且通过控制模块来实现自动控制,本发明不需要调平,使用简单。
(2)本发明中通过控制大气相干长度仪在U型支架上转动实现俯仰角的调节,通过U型支架在底座上水平转动实现水平转角调节。
(3)本发明在调节望远镜角度时通过粗调实现望远镜接收到所要瞄准的星星的光然后在相机内成像,然后在通过细调使成像位置位于相机的中心。
(4)根据成像理论计算的两个光斑的距离与实际测量的光斑距离的差值确定胶面离焦量。
(5)在步骤S2中的俯仰角的设定范围为不小于30度,俯仰角越大,则系统针对每一个星的可跟踪的时间越长。
(6)本发明设置两质心之间的距离为300像素之内,这样容易区分两个光斑,同时视场又不是很大,可以提高相机的帧频。
(7)本发明使用相机计算光斑的质心,无需将图像传送给控制模块,质心计算快,传输数据量小。
附图说明
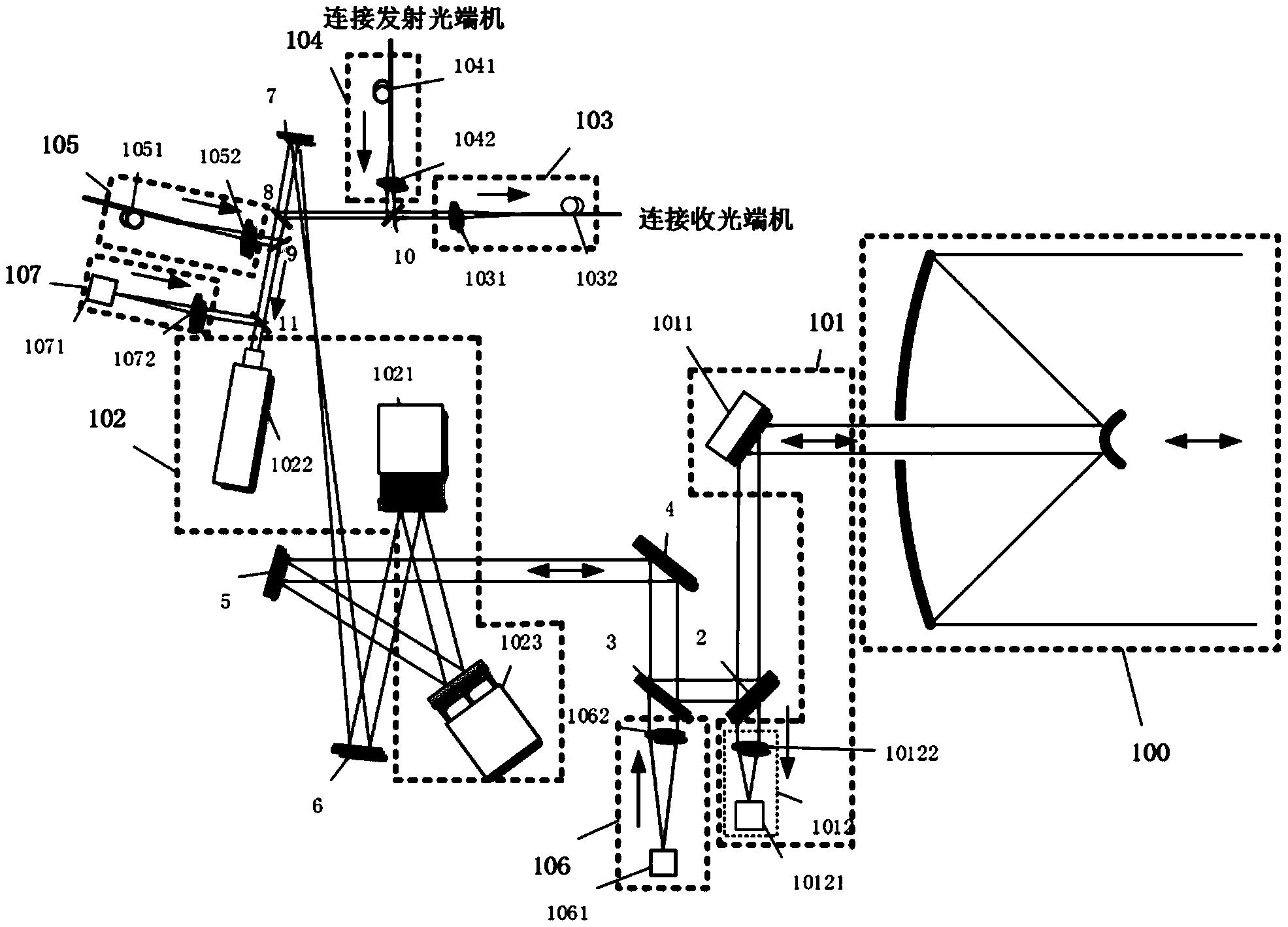
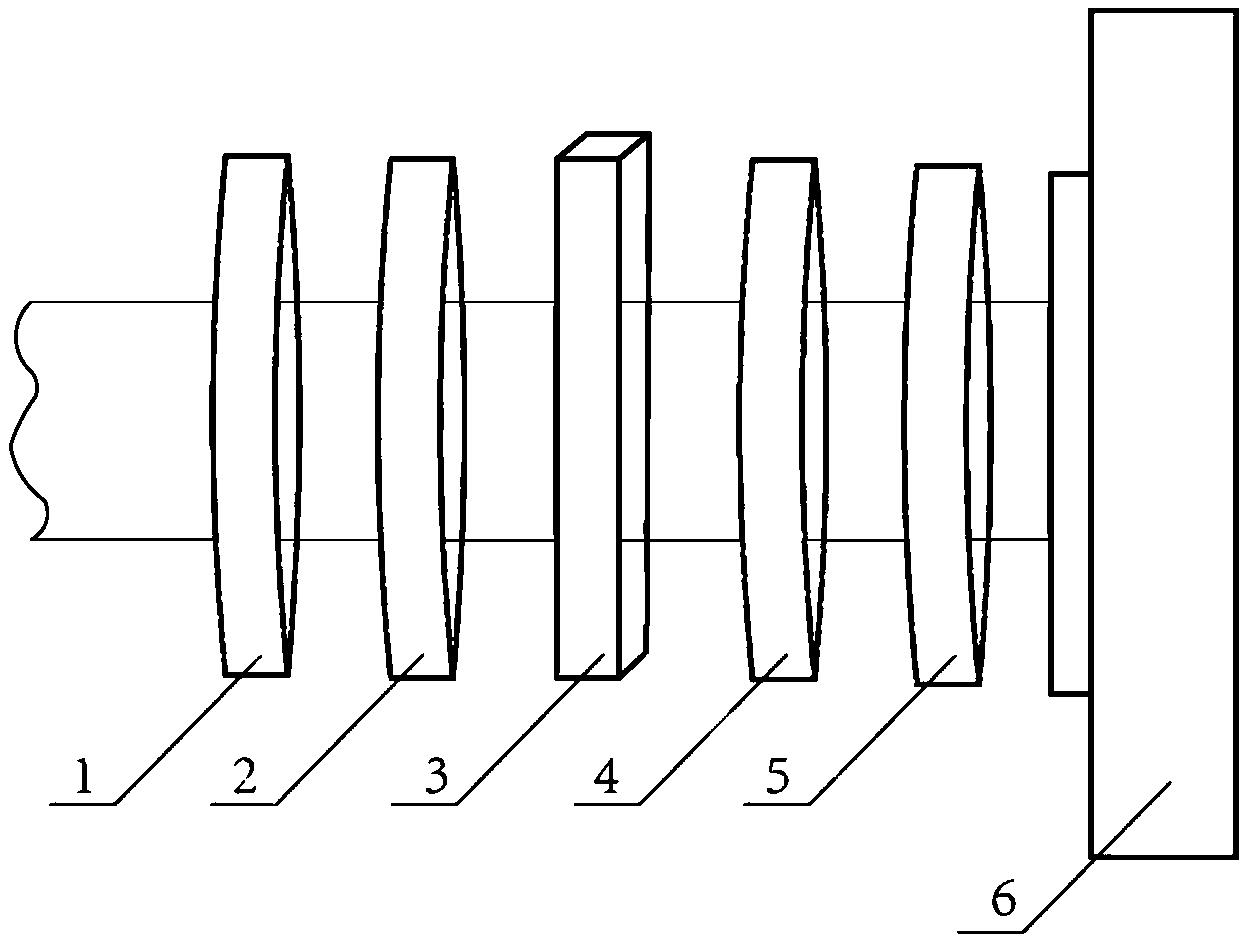
图1-3为实施例1中系统结构示意图。
图4为实施例2中的方法流程图。
对图中各部件的说明如下:
1-望远镜 2-相机 3-调焦机构 4-U型支架 5-底座 6-套箍
7-控制电路
具体实施方式
实施例1
如图1-3所示,一种全天候大气相干长度测量系统,包括大气相干长度仪、用于支撑大气相干长度仪的底座5、使大气相干长度仪相对于底座5水平转动和俯仰转动的驱动组件、控制模块;所述大气相干长度仪包括壳体和设置在壳体内的望远镜1、相机2、GPS测量部件,所述相机2设置在望远镜1的成像位置,且相机2位置通过内部的调焦机构3与壳体连接;所述控制模块与驱动组件的受控端、调焦机构3的受控端、大气相干长度仪的数据采集端和数据输入端对应连接。本方案中相机2为高速智能相机。
所述驱动组件包括U型支架4,所述壳体上的套箍6水平方向的两侧分别于U型支架4两竖向部分的内侧对应转动连接,U型支架4的竖向部分的内部还设置作为控制模块的控制电路7。
实施例2
如图4所示,使用实施例1中所述的一种全天候大气相干长度测量系统的方法,包括以下步骤:
S1、系统上电,驱动组件驱动大气相干长度仪的水平转角和俯仰角度均为0度;控制模块将相机2曝光参数从大气相干长度仪的数据输入端配置到相机2内;控制模块从数据采集端获取系统所处位置的GPS信息和对应的时间信息;
S2、控制模块调取内部存储的星图信息,根据GPS信息和对应的时间信息,在星图信息上选择大气相干长度仪俯仰角在不小于30度内亮度最高的星星,并确定该星星位置;确定星星位置可以参考《球面天文学》中第九章恒星位置的计算。控制模块计算大气相干长度仪水平转角和俯仰角度,使成像位置位于相机2的中心。具体的,
S21、控制模块先通过计算大气相干长度仪水平转角和俯仰角度控制驱动组件,使大气相干长度仪的望远镜1初步瞄准所述星星;
S22、所述星星入射到望远镜1内的光经过系统成像,根据成像后的光斑在相机2内的位置,控制模块控制驱动组件使大气相干长度仪的望远镜1精确瞄准所述星星,直至成像位置位于相机2的中心。
S3、所述星星在相机2内获得两个光斑,两个光斑的质心位置计算是通过相机2自行计算,质心的计算公式为 其中,x,y为坐标值,I(x),I(y)为x,y方向的光强。判断两个质心位置之间的距离是否超出设定值300像素,允许误差为20像素,当超过设定值时,将转动信号发送到控制模块中,控制模块控制调焦机构3进行调焦;
S4、控制模块根据星图信息确定所述星星的运行轨迹,并通过控制驱动组件使大气相干长度仪按照运动轨迹运动,在按照运动轨迹运动过程中,控制模块获取相机2计算出成像的质心位置,然后控制模块计算出对应的相干长度;
S5、控制模块将相干长度和其对应的时间信息、GPS信息、俯仰角信息、星星类型进行存储;
S6、控制模块根据星图信息确定所述星星的运行轨迹,并通过控制驱动组件使大气相干长度仪按照运动轨迹运动;
S7、当所述大气相干长度仪俯仰角小于步骤S2中的设定范围时,控制模块根据此时的GPS信息和对应的时间信息在星图信息上重新选择大气相干长度仪俯仰角在不小于30度内亮度最高的星星,并确定该星星位置;控制模块计算大气相干长度仪水平转角和俯仰角度,在该步骤中的选取的星星的光在相机2的中心成像,返回步骤S4。
以上仅为本发明创造的较佳实施例而已,并不用以限制本发明创造,凡在本发明创造的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明创造的保护范围之内。
一种使用全天候大气相干长度测量系统的方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0