








专利摘要
机械联动扫描式被动毫米波成像装置,属于毫米波成像技术领域。本发明为了解决现有被动毫米波成像装置需要安装较多辐射计来弥补分辨率不足的问题。本发明通过机械联动的方式来定量转动底部的椭球反射板,改变毫米波波束在水平方向上的方向角,再结合反射板的垂直方向扫描,从而达到毫米波波束的二维扫描,弥补了原有的单一反射板扫描这种方式的不足之处,且使信号采集数量成倍增加,大幅提高扫描成像的分辨率。同时减少了对辐射计数量的需求,方便辐射计组阵,且只需要一个转动电机进行控制,可降低动毫米波成像装置的制作和维修成本。
权利要求
1.机械联动扫描式被动毫米波成像装置,其特征在于:包括安装架(0)、椭球反射面(1)、转动机构(5)、传动杆(4)、反射板(2)和接收天线(3),椭球反射面(1)和转动机构(5)安装在安装架(0)的下部,反射板(2)和接收天线(3)安装在安装架(0)的上部,并且反射板(2)位于被测物体和接收天线(3)中间;传动杆(4)的一端与反射板(2)连接,传动杆(4)的另一端与转动机构(5)连接;所述的反射板(2)将被测物体辐射的毫米波反射至椭球反射面(1)上,椭球反射面(1)将毫米波聚焦后反射至接收天线(3);
所述的椭球反射面(1)的内壁为光滑的反射面,椭球反射面(1)的外壁为网格状的骨架结构,并且椭球反射面(1)外壁的两侧对称固定有转轴,这两个转轴分别与低轴座(1-1)和高轴座(1-2)安装,并且低轴座(1-1)和高轴座(1-2)沿转轴的轴线转动;所述的低轴座(1-1)固定安装在安装架(0)的下部靠近接收天线(3)侧;所述的高轴座(1-2)通过垫脚固定安装在安装架(0)的下部靠近被测物体侧,使椭球反射面(1)绕转轴转动;所述的椭球反射面(1)外壁的另一侧边沿处通过螺栓安装有定位板(1-3);所述的定位板(1-3)为开有6个通孔的矩形板,6个通孔包括4个为安装通孔和2个挂装通孔(1-4),4个安装通孔与椭球反射面(1)外壁的网格状骨架通过螺栓固定安装,2个挂装通孔(1-4)分别与弹簧(12-3)的一端挂装;
所述的转动机构(5)包括转动电机(9)、电机齿轮(9-1)、转动圆盘组件(10)、圆盘齿轮(10-1)、遥杆(11)和双耳座(12),所述的双耳座(12)固定安装在安装架(0)的下部,转动圆盘组件(10)、圆盘齿轮(10-1)和遥杆(11)安装在双耳座(12)的两个耳板之间;转动圆盘组件(10)包括圆盘和固定轴,圆盘由两个半径不同的半圆拼接而成,圆盘的一侧表面靠近圆盘边沿处安装有固定轴,传动杆(4)的另一端套装在固定轴上,并且传动杆(4)绕固定轴转动;圆盘的另一侧表面与圆盘齿轮(10-1)的固定安装,并且圆盘中心与圆盘齿轮(10-1)的中心重合;转动圆盘组件(10)和圆盘齿轮(10-1)通过转轴与双耳座(12)的一个耳板连接安装,并且转动圆盘组件(10)和圆盘齿轮(10-1)绕转轴转动,该耳板的下部对称开有两个定位螺栓安装孔(12-2),定位螺栓安装孔(12-2)的轴线与圆盘齿轮(10-1)的轴线垂直;所述的遥杆(11)的一端通过转轴转动安装在双耳座(12)的另一个耳板上,遥杆(11)的另一端安装在转动圆盘组件(10)的固定轴上,限制传动杆(4)沿固定轴轴线方向的移动位置;
所述的转动电机(9)通过电机座固定安装在安装架(0)的下部,电机齿轮(9-1)套装在转动电机(9)的转动轴上,并且电机齿轮(9-1)和圆盘齿轮(10-1)啮合安装。
2.根据权利要求1所述的机械联动扫描式被动毫米波成像装置,其特征在于:所述的接收天线(3)为水平放置成一排的辐射计阵列。
3.根据权利要求1所述的机械联动扫描式被动毫米波成像装置,其特征在于:所述的反射板(2)上安装有反射板安装座(2-1)和传动杆安装轴(2-2),两个反射板安装座(2-1)分别与反射板(2)的两侧边中点旋转安装,并且两个反射板安装座(2-1)水平固定安装在安装架(0)的上部;传动杆安装轴(2-2)安装在反射板(2)的侧边上,传动杆(4)的一端套装在传动杆安装轴(2-2)上,并且传动杆(4)绕传动杆安装轴(2-2)转动。
4.根据权利要求1所述的机械联动扫描式被动毫米波成像装置,其特征在于:所述的圆盘由半径为59mm的半圆和半径为60mm的半圆拼接而成。
5.根据权利要求1所述的机械联动扫描式被动毫米波成像装置,其特征在于:所述的定位板(1-3)位于转动圆盘组件(10)的圆盘正上方。
6.根据权利要求5所述的机械联动扫描式被动毫米波成像装置,其特征在于:所述的两个定位螺栓安装孔(12-2)上分别安装有定位螺栓(12-1),两个定位螺栓(12-1)分别与弹簧(12-3)的另一端挂装,弹簧(12-3)使椭球反射面(1)的定位板(1-3)始终抵在转动圆盘组件(10)的圆盘正上方。
7.根据权利要求1所述的机械联动扫描式被动毫米波成像装置,其特征在于:该装置还包括控制模块、信号处理模块和计算机,控制模块与信号处理模块分别与计算机连接,其中计算机通过信号处理模块来对接收天线(3)接收到的毫米波进行数据处理和提取,计算机通过控制模块来控制转动电机(9)的转动。
说明书
技术领域
本发明涉及机械联动扫描式被动毫米波成像装置,属于毫米波成像技术领域。
背景技术
近年来,航空安全逐渐成为国家安全的重要组成部分,民航安检迫切需要一种能对人 体随身物品快速全面检测的设备。毫米波可以穿透常见衣物,且不具有电离性,因此,毫 米波成像技术受到了广泛关注。
现有技术中被动毫米波成像装置往往仅使用旋转反射板的方法来实现波束扫描,如授 权公告号为CN104076358的发明专利“一种被动式毫米波成像安检设备”公开了一种较为 成熟的被动式毫米波成像设备,该设备采用了只旋转反射板的方法来实现垂直方向上的波 束扫描,并通过两排水平方向上有一定错位的接收天线来接收信号,最后通过对采样信号 的处理来实现成像。申请公布号为CN106154345A的发明专利“椭球面被动毫米波成像系 统”同样只使用旋转反射板的方法来实现波束扫描。由于现有技术仅是单一旋转反射板, 且反射板只能在垂直方向上实现波束扫描,导致水平方向的采样数量较少,所以接收天线 一般在水平方向上装有较多的辐射计来弥补分辨率不足的问题。因此,这类毫米波成像设 备往往成本较高。
为了解决上述发明中成像分辨率不足的问题,本专利提出了一种椭球反射面和反射板 机械联动扫描式被动毫米波成像装置。
发明内容
本发明为了解决现有被动毫米波成像装置需要安装较多辐射计来弥补分辨率不足的 问题,提供了一种机械联动扫描式被动毫米波成像装置。
本发明的技术方案:
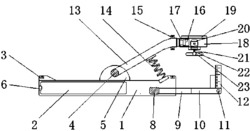
机械联动扫描式被动毫米波成像装置,包括安装架0、椭球反射面1、转动机构5、传动杆4、反射板2和接收天线3,椭球反射面1和转动机构5安装在安装架0的下部, 反射板2和接收天线3安装在安装架0的上部,并且反射板2位于被测物体和接收天线3 中间;传动杆4的一端与反射板2连接,传动杆4的另一端与转动机构5连接;所述的反 射板2将被测物体辐射的毫米波反射至椭球反射面1上,椭球反射面1将毫米波聚焦后反 射至接收天线3。
优选的:所述的接收天线3为水平放置成一排的辐射计阵列。
优选的:所述的反射板2上安装有反射板安装座2-1和传动杆安装轴2-2,两个反射板安装座2-1分别与反射板2的两侧边中点旋转安装,并且两个射板安装座2-1水平固定 安装在安装架0的上部;传动杆安装轴2-2安装在反射板2的侧边上,传动杆4的一端套 装在传动杆安装轴2-2上,并且传动杆4绕传动杆安装轴2-2转动。
优选的:所述的椭球反射面1的内壁为光滑的反射面,椭球反射面1的外壁为网格状 的骨架结构,并且椭球反射面1外壁的两侧对称固定有转轴,这两个转轴分别与低轴座1-1和高轴座1-2安装,并且低轴座1-1和高轴座1-2沿转轴的轴线转动;所述的低轴座 1-1固定安装在安装架0的下部靠近接收天线3侧;所述的高轴座1-2通过垫脚1-4固定 安装在安装架0的下部靠近被测物体侧,使椭球反射面1绕转轴转动;所述的椭球反射面 1外壁的另一侧边沿处通过螺栓安装有定位板1-3;所述的定位板1-3为开有6个通孔的 矩形板,6个通孔包括4个为安装通孔和2个挂装通孔1-4,4个安装通孔与椭球反射面1 外壁的网格状骨架通过螺栓固定安装,2个挂装通孔1-4分别与弹簧12-3的一端挂装。
优选的:所述的转动机构5包括转动电机9、电机齿轮9-1、转动圆盘组件10、圆盘齿轮10-1、遥杆11和双耳座12,所述的双耳座12固定安装在安装架0的下部,转动圆 盘组件10、圆盘齿轮10-1和遥杆11安装在双耳座12的两个耳板之间;转动圆盘组件10 包括圆盘和固定轴,圆盘由两个半径不同的半圆拼接而成,圆盘的一侧表面靠近圆盘边沿 处安装有固定轴,传动杆4的另一端套装在固定轴上,并且传动杆4绕固定轴转动;圆盘 的另一侧表面与圆盘齿轮10-1的固定安装,并且圆盘中心与圆盘齿轮10-1的中心重合; 转动圆盘组件10和圆盘齿轮10-1通过转轴与双耳座12的一个耳板连接安装,并且转动 圆盘组件10和圆盘齿轮10-1绕转轴转动,该耳板的下部对称开有两个定位螺栓安装孔 12-2,定位螺栓安装孔12-2的轴线与圆盘齿轮10-1的轴线垂直;所述的遥杆11的一端通 过转轴转动安装在双耳座12的另一个耳板上,遥杆11的另一端安装在转动圆盘组件10 的固定轴上,限制传动杆4沿固定轴轴线方向的移动位置;所述的转动电机9通过电机座 固定安装在安装架0的下部,电机齿轮9-1套装在转动电机9的转动轴上,并且电机齿轮 9-1和圆盘齿轮10-1啮合安装。
优选的:所述的圆盘由半径为59mm的半圆和半径为60mm的半圆拼接而成。
优选的:所述的定位板1-3位于转动圆盘组件10的圆盘正上方。
优选的:所述的两个定位螺栓安装孔12-2上分别安装有定位螺栓12-1,两个定位螺 栓12-1分别与弹簧12-3的另一端挂装,弹簧12-3使椭球反射面1的定位板1-3始终抵在转动圆盘组件10的圆盘正上方。
优选的:该装置还包括控制模块、信号处理模块和计算机,控制模块与信号处理模块 分别与计算机连接,其中计算机通过信号处理模块来对接收天线3接收到的毫米波进行数 据处理和提取,计算机通过控制模块来控制转动电机9的转动。
本发明具有以下有益效果:本发明涉及一种机械联动扫描式被动毫米波成像装置,该 装置通过机械联动的方式来定量转动底部的椭球反射面,改变毫米波波束在水平方向上的 方向角,再结合反射板的垂直方向扫描,从而达到毫米波波束的二维扫描,弥补了原有的 单一反射板扫描这种方式的不足之处,且使信号采集数量成倍增加,大幅提高扫描成像的 分辨率。同时减少了对辐射计数量的需求,方便辐射计组阵,且只需要一个转动电机进行 控制,可降低动毫米波成像装置的制作和维修成本。且该装置的成像方式更加灵活多变, 可通过对水平方向的不同角度得到的多个一维扫描图像进行合成,也可直接对所有二维信 号采样所得数据进行成像,还可以同时采用这两种方法,经过对比来提高精度和容错率, 降低成像的误判率。
附图说明
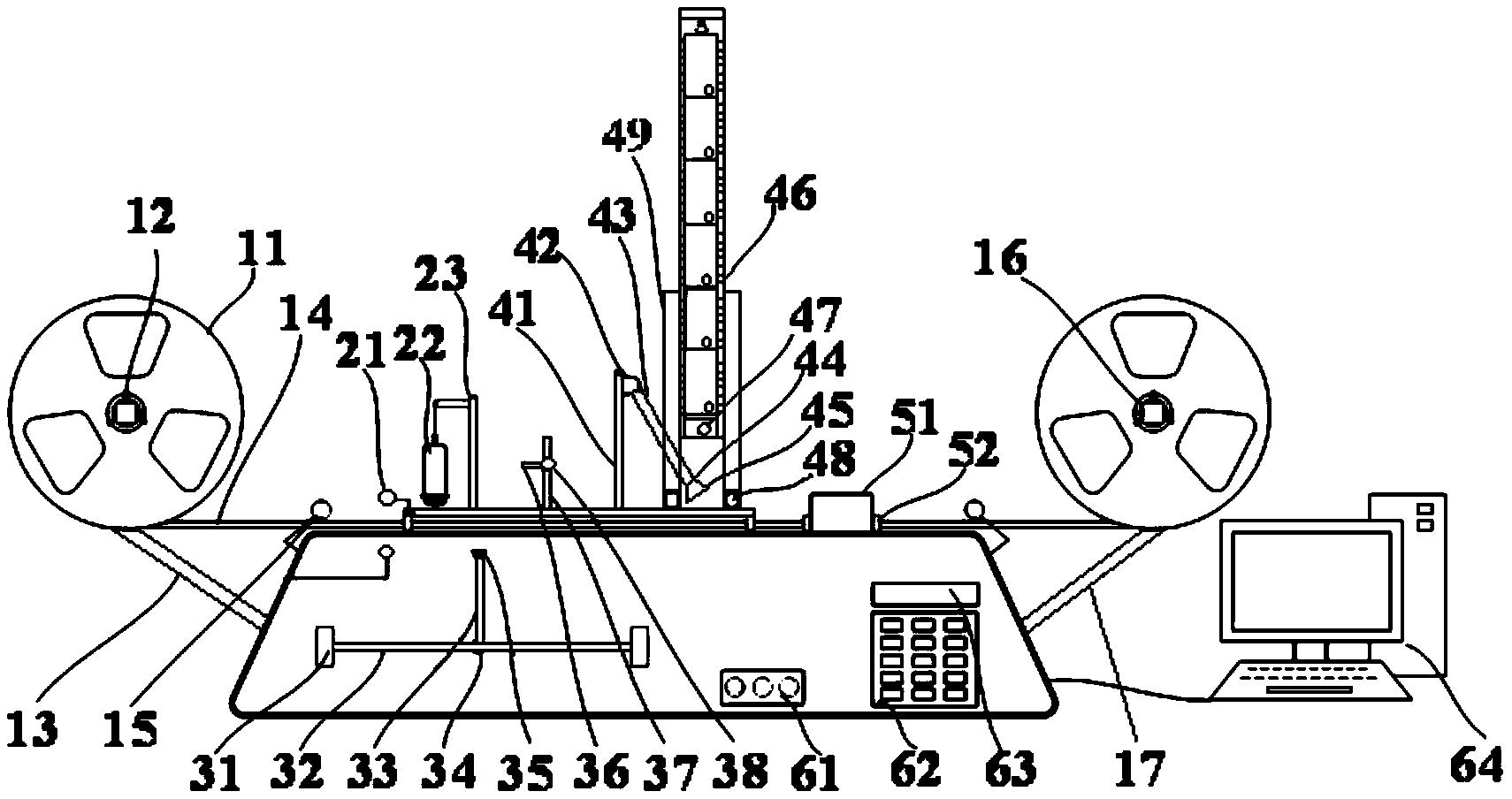
图1为本发明的结构示意图;
图2为图1的左视图;
图3为图1沿C-C的剖视图;
图4为图3中国A处的放大图;
图5为反射板的结构示意图;
图6为椭球反射面的结构示意图;
图7为图6的仰视图;
图8为图7中B处放大图;
图9为转动机构的立体结构示意图;
图10为图9的侧视图;
图11为图10沿A-A的剖视图;
图12为图10沿B-B的剖视图;
图13为圆盘的立体结构示意图;
图14为圆盘的结构示意图;
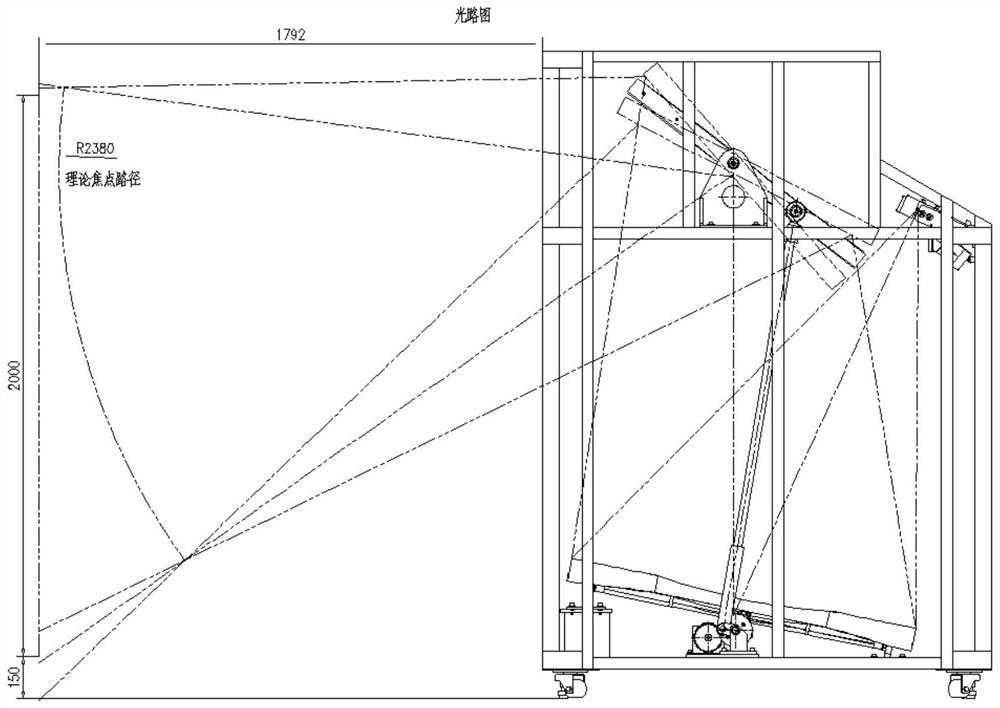
图15为本发明的光路图;
图中0-安装架,1-椭球反射面,2-反射板,3-接收天线,4-传动杆,5-转动机构,9-转动电机,10-圆盘组件,11-遥杆,12-双耳座,1-1-低轴座,1-2-高轴座,1-3-定位板,1-4-挂装通孔,2-1-反射板安装座,2-2-传动杆安装轴,9-1-电机齿轮,10-1-圆盘齿轮,12-1-定位螺栓,12-2-定位螺栓安装孔,12-3-弹簧。
具体实施方式
具体实施方式一:
结合附图1至图15说明本发明具体实施方式:本发明一种机械联动扫描式被动毫米 波成像装置,包括安装架0、椭球反射面1、转动机构5、传动杆4、反射板2和接收天线 3,椭球反射面1和转动机构5安装在安装架0的下部,反射板2和接收天线3安装在安 装架0的上部,并且反射板2位于被测物体和接收天线3中间;传动杆4的一端与反射板 2连接,传动杆4的另一端与转动机构5连接;所述的反射板2将被测物体辐射的毫米波 反射至椭球反射面1上,椭球反射面1将毫米波聚焦后反射至接收天线3。如此设置,如 图1至图3所示,被测物体辐射的毫米波通过反射板2反射至椭球反射面1上,利用椭球 反射面1两个焦点聚焦的特性,将毫米波反射至接收天线3,本装置的传动机构5通过传 动杆可带动反射板2转动下,还可控制椭球反射面1的转动。当反射板2转动一个周期扫 描垂直方向得到一组数据后,椭球反射面1发生转动使波束的水平方向偏,接着再通过传 动杆4反方向转动反射板2,进而得到下一组垂直方向上的数据,同样在反射板2转完这 一个周期的时候带动椭球反射面1再次转动次。重复上述过程得到若干组垂直方向上的采 样数据。可以通过将每组数据分别成像,然后将得到的若干个图像进行合成,提高成像的 容错率。也可以将所有采样数据直接成像,提高分辨率。亦可以上述两种成像方法同时使 用,对比两种方案成像结果,弥补两种方法各自的不足之处。
所述的接收天线3为水平放置成一排的辐射计阵列。如此设置,椭球反射面1的一个 焦点位于接收天线3所在直线上。接收天线3将接收到的聚焦后的毫米波信号转化成电压 信号送至信号处理模块。
所述的反射板2上安装有反射板安装座2-1和传动杆安装轴2-2,两个反射板安装座 2-1分别与反射板2的两侧边中点旋转安装,并且两个射板安装座2-1水平固定安装在安装架0的上部;传动杆安装轴2-2安装在反射板2的侧边上,传动杆4的一端套装在传动 杆安装轴2-2上,并且传动杆4绕传动杆安装轴2-2转动。如此设置,如图5所示,反射 板安装座2-1将反射板2安装在安装架0上,并且反射板2可以安装点转动,传动杆4的 一端套装在传动杆安装轴2-2上,并且传动杆4绕传动杆安装轴2-2转动,因此当传动杆 4运动时,可带动反射板2绕反射板安装座2-1与反射板2的安装点旋转,继而实现反射 板2多角度发射的被测物体毫米波。
所述的椭球反射面1的内壁为光滑的反射面,椭球反射面1的外壁为网格状的骨架结 构,并且椭球反射面1外壁的两侧对称固定有转轴,这两个转轴分别与低轴座1-1和高轴座1-2安装,并且低轴座1-1和高轴座1-2沿转轴的轴线转动;所述的低轴座1-1固定安 装在安装架0的下部靠近接收天线3侧;所述的高轴座1-2通过垫脚1-4固定安装在安装 架0的下部靠近被测物体侧,使椭球反射面1绕转轴转动;所述的椭球反射面1外壁的另 一侧边沿处通过螺栓安装有定位板1-3;所述的定位板1-3为开有6个通孔的矩形板,6 个通孔包括4个为安装通孔和2个挂装通孔1-4,4个安装通孔与椭球反射面1外壁的网 格状骨架通过螺栓固定安装,2个挂装通孔1-4分别与弹簧12-3的一端挂装。如此设置, 如图6至图8所示,椭球反射面1的外壁为网格状的骨架结构可以减轻自重;椭球反射面 1外壁的两侧对称固定有转轴,这两个转轴分别与低轴座1-1和高轴座1-2安装,当低轴 座1-1和高轴座1-2固定安装后,可以使椭球反射面1其绕外壁的两侧对称固定的转轴转 动。
所述的转动机构5包括转动电机9、电机齿轮9-1、转动圆盘组件10、圆盘齿轮10-1、遥杆11和双耳座12,所述的双耳座12固定安装在安装架0的下部,转动圆盘组件10、 圆盘齿轮10-1和遥杆11安装在双耳座12的两个耳板之间;转动圆盘组件10包括圆盘和 固定轴,圆盘由两个半径不同的半圆拼接而成,圆盘的一侧表面靠近圆盘边沿处安装有固 定轴,传动杆4的另一端套装在固定轴上,并且传动杆4绕固定轴转动;圆盘的另一侧表 面与圆盘齿轮10-1的固定安装,并且圆盘中心与圆盘齿轮10-1的中心重合;转动圆盘组 件10和圆盘齿轮10-1通过转轴与双耳座12的一个耳板连接安装,并且转动圆盘组件10 和圆盘齿轮10-1绕转轴转动,该耳板的下部对称开有两个定位螺栓安装孔12-2,定位螺 栓安装孔12-2的轴线与圆盘齿轮10-1的轴线垂直;所述的遥杆11的一端通过转轴转动 安装在双耳座12的另一个耳板上,遥杆11的另一端安装在转动圆盘组件10的固定轴上, 限制传动杆4沿固定轴轴线方向的移动位置;所述的转动电机9通过电机座固定安装在安 装架0的下部,电机齿轮9-1套装在转动电机9的转动轴上,并且电机齿轮9-1和圆盘齿 轮10-1啮合安装。所述的圆盘由半径为59mm的半圆和半径为60mm的半圆拼接而成。 所述的两个定位螺栓安装孔12-2上分别安装有定位螺栓12-1,两个定位螺栓12-1分别与 弹簧12-3的另一端挂装,弹簧12-3使椭球反射面1的定位板1-3始终抵在转动圆盘组件 10的圆盘正上方。如此设置,如图4和图9至图14所示,当转动电机9转动时,带动电 机齿轮9-1转动,继而带动圆盘齿轮10-1和转动圆盘组件10转动,转动圆盘组件10的 固定轴带动传动杆4传动,继而带动反射板2转动,实现反射板2多角度发射的被测物体 毫米波,使接收天线3得到一组垂直方向上的采样数据。由于盘由半径为59mm的半圆 和半径为60mm的半圆拼接而成,且在弹簧12-3的作用下椭球反射面1的定位板1-3始 终抵在圆盘正上方,当圆盘与椭球反射面1接触处的圆盘半径发生变化时,椭球反射面1 绕其壁的两侧对称固定的转轴转动,然后反射板2再次多角度发射的被测物体毫米波,使 接收天线3得到另一组垂直方向上的采样数据。
该装置还包括控制模块、信号处理模块和计算机,控制模块与信号处理模块分别与计 算机连接,其中计算机通过信号处理模块来对接收天线3接收到的毫米波进行数据处理和 提取,计算机通过控制模块来控制转动电机9的转动。
本申请的工作过程是这样实现的:当设备开机正常运转后,被测物体站到设备正前方 1.8米处左右,此时传动杆4位于最高点,圆盘的60mm半径顶住椭球反射面1的定位板1-3上,如图15所示,被测物体上某一点辐射的毫米波经过反射板2发射到达椭球反射 面1后汇聚在接收天线3处,控制转动电机9,转动圆盘组件10开始逆时针转动,带动 最高点处传动杆4向下运动,使反射板2顺时针转动,接收天线3的每个辐射计可以得到 垂直方向上N个采样数据,一共64*N个采样数据(假设接收天线3共有64个辐射计), 通过计算机控制信号处理模块的采样频率和驱动电机转动速度,使信号处理模块获得最后 一个数据时,传动杆4达到了最低点,此时圆盘与椭球反射面1的定位板1-3接触处的圆 盘半径从60mm变为59mm,使椭球反射面1绕其壁的两侧对称固定的转轴转动,使其安 装定位板1-3的一侧下降1mm,反射的波束在水平方向上出现了偏转,然后转盘继续逆 时针旋转,带动传动杆4向上运动,反射板2逆时针旋转,同样当记录下64*N个数据后 传动杆4达到最高点,圆盘与椭球反射面1的定位板1-3接触处的半径由59mm变回 60mm,此时完成一个采样周期。
这样一来一个采样周期就可以得到两组数量为64*N的采样数据,将这些数据根据接 收信号的强弱用不同的颜色灰度进行各自的成像,得到了两张图像,然后再将这两张图像 进行合成,就能得到一张较为准确的图像。同时也可将数据汇总成2*64*N个采样点,通过直接成像,得到另一张较为清晰的图像。最后将所得两张图像进行对比,提高分辨率和容错率。
本实施方式只是对本专利的示例性说明,并不限定它的保护范围,本领域技术人员还 可以对其局部进行改变,只要没有超出本专利的精神实质,都在本专利的保护范围内。
机械联动扫描式被动毫米波成像装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。







动态评分
0.0