









专利摘要
一种飞行器控制技术领域的基于直接自适应控制重构的大型民用飞机飞行控制方法,把直接自适应方法与模型跟随方法结合并应用于B747-200飞机,实现作动器故障模式下的大型民用飞机控制重构飞行模拟,为大型民用飞机作动器故障模式下的控制重构提供了借鉴,对提高飞机安全性、降低飞机事故率、提高飞机故障情况下的生存能力有重要意义。
权利要求
1.一种基于直接自适应控制重构的大型民用飞机飞行控制方法,其特征在于,包括以下步骤:
第一步、建立大型民用飞机的包括被控对象线性模型和飞机参考模型的动力学模型,具体步骤包括:
1.1)在设定的飞行模态下,对飞机进行受力分析,建立飞机质心移动的和绕质心转动的动力学方程,运用小扰动原理将非线性的动力学方程做线性化处理,再将线性方程组构造成矩阵的形式,就得到了状态空间下的被控对象线性模型;
1.2)在被控对象模型的基础上,运用极点配置法、线性二次型调节器法设计状态空间下的飞机参考模型,该飞机参考模型为稳定的闭环系统、有理想的动态特性且作为被控对象的跟随目标;
第二步、构造被控对象控制器、故障控制器和自适应控制器,其中:被控对象控制器的输入包括:由系数矩阵联系的模型跟随直接自适应控制输入和故障控制输入;故障控制器将故障的影响以控制输入的形式体现在控制项中,根据作动器故障情况的不同,体现为控制输入时的值也不同;自适应控制器包含处理故障输入的控制项,并根据模型跟随的思想包含被控对象状态反馈、参考模型状态前馈;
第三步、由于自适应控制器对故障的在线适应能力体现在2个自适应增益阵(C0、G0)和1个自适应增益向量(v)中,该自适应增益阵和自适应增益向量根据被控对象与参考模型的输出误差在线调整大小;根据Lyapunov稳定性理论获取自适应增益阵和增益向量的更新率,利用更新率,自适应增益阵和增益向量则可以根据被控对象与参考模型的输出误差实现在线更新,从而实现对作动器故障的在线自适应。
2.根据权利要求1所述的方法,其特征是,所述的被控对象模型为:
3.根据权利要求1所述的方法,其特征是,所述的飞机参考模型为:
该模型为稳定的闭环系统,且有理想的动态特性,其中:Am∈Rn×n是常参数稳定矩阵,Bm∈Rn×l、Cm∈Rp×n都为常参数阵, 为系统状态,ym∈Rp为系统输出, 为有界参考输入。
4.根据权利要求1所述的方法,其特征是,所述的自适应控制输入为up, 其中:
σ=diag{σ1,…,σm}
σ为系数矩阵,
u为自适应控制器,
为故障控制器, 对应常见的作动器故障的控制量取值为:
其中:tj表示第j个作动器发生故障的时刻,xm的系数矩阵K0是常增益阵,在其它增益阵皆时变的情况下,常增益阵K0有利于增加系统鲁棒性;v项用以抵消故障影响,是u的核心,自适应控制增益阵C0、G0及自适应控制向量v的计算属于直接自适应方法的范畴,通过在线更新C0、G0、v的参数,使u对故障有自适应能力;
当作动器发生故障时,系数矩阵将屏蔽相应的自适应控制输入项、启用相应的故障控制输入项,同时自适应控制输入的其它项仍起作用;当无故障情况下,系数矩阵将屏蔽掉故障控制输入的影响、仅自适应控制输入起作用。
5.根据权利要求1所述的方法,其特征是,所述的故障控制输入用于取代现有的故障模型,直接把故障的影响以控制输入的形式作用于飞行控制系统。
6.根据权利要求1所述的方法,其特征是,所述的系数矩阵在作动器故障时,对应该作动器的相应项从0变为1,从而把作动器的故障转化为相应的控制输入项。
7.根据权利要求1所述的方法,其特征是,所述的输出误差为e,e=yp-ym=Cpxp-Cmxm。
8.根据权利要求1所述的方法,其特征是,所述的自适应增益阵和增益向量的更新率 取值为
1)运用极点配置思想,选任意稳定矩阵Ae,维数同Am,其中:Ae满足误差动力学
2)选任意对称正定矩阵Q
3)使P满足:
说明书
技术领域
本发明涉及一种飞行器控制技术领域的方法,具体涉及一种基于模型跟随的直接自适应控制重构算法及其在大型民用飞机飞行控制中的运用。
背景技术
可重构飞行控制系统(Reconfigurable Flight Control System,RFCS)能在飞机发生故障时重新设计控制器结构或计算控制器增益,利用飞机的控制冗余功能,自主并及时地保证飞行安全。
经典控制重构方法可以分为主动式重构和被动式重构。被动式重构基于鲁棒控制的设计方法,可通过控制律内在的容错能力容许某些种类和一定程度的故障存在,但对未知的、突发的故障则缺乏自适应能力。与被控式重构不同,主动式重构基于控制器的重新设计,可以处理很多未知故障。
自适应重构方法属于主动式重构。与其它控制方法相比,自适应重构方法的最大优势是当面对大量不确定参数时,仍能保证飞机所需的渐近跟随。它的设计思想是利用误差来调整控制器参数以实现自适应控制。自适应重构方法又分为间接自适应法和直接自适应法。间接自适应法分两步:参数辨识和参数计算。参数辨识需要持续的输入激励和平滑的输入-输出数据,而随着参数数量的增加,参数辨识变得困难。为了便于计算,需要对过去的输入-输出数据强加限制,而这却可能导致重构性能的恶化。直接自适应法则能避免这些问题,因为它不需要辨识系统的准确信息,而是对控制器的参数进行直接估计。
经过对现有技术的检索发现,章卫国等,在《基于鲁棒跟踪控制的飞控系统自适应重构技术研究》(西北工业大学自动化学院陕西西安710072)中公开了一种基于鲁棒跟踪控制的飞控系统作动器故障重构设计方法。该方法根据故障的随机性设计系列并行的辨识模型,每个模型对应一种故障,同时对应于每个辨识模型建立一个控制器。但该技术在处理未知不确定故障时,由于模型库中没有相应匹配模型,导致出现较大诊断偏差,因而控制重构性能受到一定影响。本发明人针对含未知不确定故障的飞行控制系统,从标称模型跟随与残差逻辑分析角度,进行自适应故障检测与处理。
刘小雄等在《基于直接自适应控制的重构飞控系统研究》(控制与决策,2007)中提出了直接自适应重构控制,并通过PI比例积分控制律在线调参,该算法在设计控制器时,采用了通常的误差反馈和参考模型的状态及输入反馈,但这种控制方式难以保证被控对象的稳定性,本发明拟在控制器中引入被控对象的状态反馈,保证被控对象的稳定性。
章卫国等在《容错飞控系统故障隔离与自适应重构设计》(中北大学学报,2007)中公开了一种基于多模型自适应最优二次型的容错飞控系统设计算法,该算法通过建立多个辨识模型与基于约束二次型的模型跟随控制器设计,实现对飞控系统实时故障隔离与重构。但该技术采用统一的参考模型来代替实际飞行工况,当飞行条件偏离参考模型较大时会使重构控制带来较大偏差;其次,考虑多模型切换稳定性时作者运用了淡化环节来处理,该方法可以抑制高频噪声,但系统的稳定性还与切换系统的稳定裕度有关,如果切换系统极点不稳定,即使有淡化环节也难以保证切换稳定。本发明拟从系统满足Lyapunov稳定性角度入手,对重构控制器进行稳定自适应控制设计。
发明内容
本发明针对现有技术存在的上述不足,提出一种用于大型民用飞机飞行控制的直接自适应控制重构方法,把直接自适应方法与模型跟随方法结合并应用于B747-200飞机,实现作动器故障模式下的大型民用飞机控制重构飞行模拟,为大型民用飞机作动器故障模式下的控制重构提供了借鉴,对提高飞机安全性、降低飞机事故率、提高飞机故障情况下的生存能力有重要意义。
本发明是通过以下技术方案实现的,本发明包括以下步骤:
第一步、建立大型民用飞机的包括被控对象线性模型和飞机参考模型的动力学模型,具体步骤包括:
1.1)在设定的飞行模态下,对飞机进行受力分析,建立飞机质心移动的和绕质心转动的动力学方程,运用小扰动原理将非线性的动力学方程做线性化处理,再将线性方程组构造成矩阵的形式,就得到了状态空间下的被控对象线性模型;
1.2)在被控对象模型的基础上,运用极点配置法、LQR(Linear-quadratic Regulator线性二次型调节器)法等方法设计状态空间下的飞机参考模型,该飞机参考模型为稳定的闭环系统、有理想的动态特性且作为被控对象的跟随目标。
所述的被控对象模型为:
所述的飞机参考模型为:
第二步、构造被控对象控制器、故障控制器和自适应控制器,其中:被控对象控制器的输入包括:由系数矩阵联系的模型跟随直接自适应控制输入(以下简称“自适应控制输入”)和故障控制输入;故障控制器将故障的影响以控制输入的形式体现在控制项中,根据作动器故障情况的不同,体现为控制输入时的值也不同;自适应控制器包含处理故障输入的控制项,并根据模型跟随的思想包含被控对象状态反馈、参考模型状态前馈等项。
所述的自适应控制输入为up, 其中:
σ=diag{σ1,…,σm}
σ为系数矩阵,
u为自适应控制器,
为故障控制器, 对应常见的作动器故障的控制量取值为:
其中:tj表示第j个作动器发生故障的时刻,xm的系数矩阵K0是常增益阵,在其它增益阵皆时变的情况下,常增益阵K0有利于增加系统鲁棒性;v项用以抵消故障影响,是u的核心。自适应控制增益阵C0、G0及自适应控制向量v的计算属于直接自适应方 法的范畴。通过在线更新C0、G0、v的参数,使u对故障有自适应能力。
当作动器发生故障时,系数矩阵将屏蔽相应的自适应控制输入项、启用相应的故障控制输入项,同时自适应控制输入的其它项仍起作用;当无故障情况下,系数矩阵将屏蔽掉故障控制输入的影响、仅自适应控制输入起作用。
所述的故障控制输入用于取代现有的故障模型,直接把故障的影响以控制输入的形式作用于飞行控制系统。
所述的系数矩阵在作动器故障时,对应该作动器的相应项从0变为1,从而把作动器的故障转化为相应的控制输入项。
实际中,因不需要故障检测与识别,所以被控对象控制输入中的系数矩阵与故障控制输入都是未知的,自适应控制器会根据被控对象与参考模型的输出误差在线调整自适应控制器的增益矩阵和增益向量,实现被控对象对参考模型的跟随。
第三步、由于自适应控制器对故障的在线适应能力体现在2个自适应增益阵(C0、G0)和1个自适应增益向量(v)中,该自适应增益阵和自适应增益向量根据被控对象与参考模型的输出误差在线调整大小;根据Lyapunov稳定性理论获取自适应增益阵和增益向量的更新率,利用更新率,自适应增益阵和增益向量则可以根据被控对象与参考模型的输出误差实现在线更新,从而实现对作动器故障的在线自适应。
所述的输出误差为e,e=yp-ym=Cpxp-Cmxm。
所述的自适应增益阵和增益向量的更新率 取值为
1)运用极点配置思想,选任意稳定矩阵Ae,维数同Am,其中:Ae满足误差动力学
2)选任意对称正定矩阵Q
3)使P满足:
为了实现上述目的,本发明技术方案的创新点在于:1)把故障影响以控制输入的形式施加于控制器,直接有效地反映了飞机故障对控制的影响;故障控制输入考虑了操纵面卡死、失效、 松浮几种典型故障模式;2)在设计控制器时,本发明选择将参考模型的状态而非输出作为控制器的一部分,避免了乘以观测矩阵可能造成的信息缺失;3)利用系统的输出误差而不是状态误差来做自适应更新率的求解,更符合工程实际。
附图说明
图1为本发明示意图。
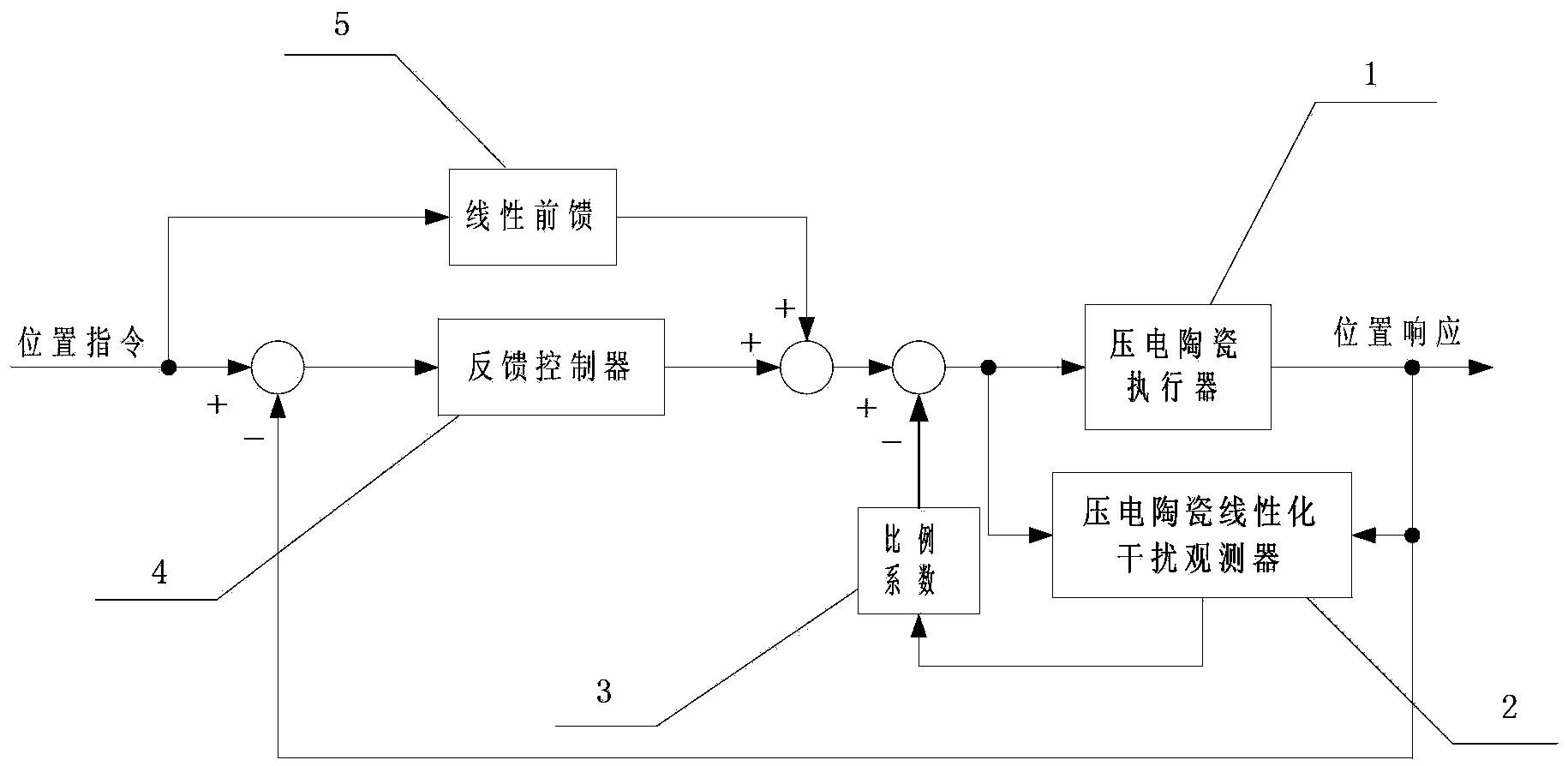
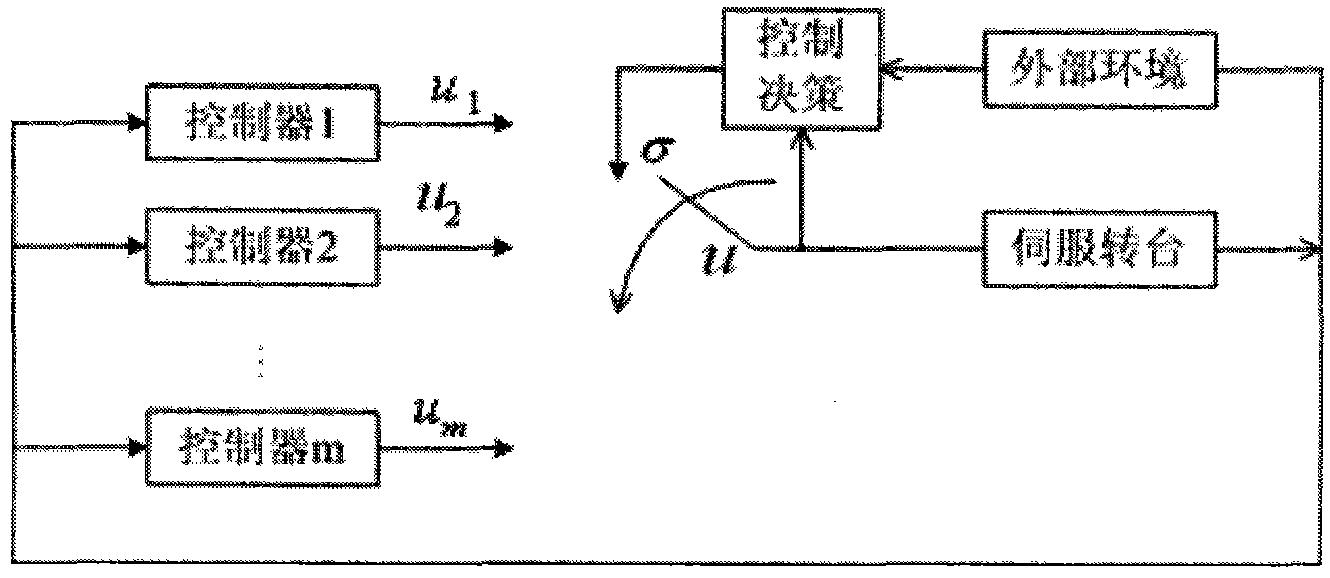
图2为模型跟随直接自适应控制器结构图。
图3为自适应增益阵和增益向量的更新率的推导过程原理框图。
图4为方向舵卡死后,侧滑角响应曲线示意图;
图5为方向舵卡死后,滚转角速率响应曲线示意图;
图6为方向舵卡死后,偏航角速率响应曲线示意图;
图7为方向舵卡死后,滚转角的响应曲线示意图;
图中:虚线(注释为1)表示参考模型的响应;实线(注释为2)表示用本发明模型跟随直接自适应方法重构后被控对象的响应;点画线(注释为3)表示用没有自适应能力的模型跟随方法控制下的被控对象的响应。
图8为副翼卡死后,侧滑角响应曲线示意图。
图9为副翼卡死后,滚转角速率响应曲线示意图。
图10为副翼卡死后,偏航角速率响应曲线示意图。
图11为副翼卡死后,滚转角的响应曲线示意图。
具体实施方式
下面对本发明的实施例作详细说明,本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
实施例1
实施例包括以下步骤:
第一步、建立大型民用飞机的包括被控对象线性模型和飞机参考模型的动力学模型,具体步骤包括:
1.1)在设定的飞行模态下,对飞机进行受力分析,建立飞机质心移动的和绕质心转动的动力学方程,运用小扰动原理将非线性的动力学方程做线性化处理,再将线性方程组构造成矩阵的形式,就得到了状态空间下的被控对象线性模型;
1.2)在被控对象模型的基础上,运用极点配置法、LQR(Linear-quadratic Regulator,线性二次型调节器)法等方法设计状态空间下的飞机参考模型,该飞机参考模型为稳定的闭环系统、有理想的动态特性且作为被控对象的跟随目标。
所述的被控对象模型为:
所述的飞机参考模型为:
第二步、构造被控对象控制器、故障控制器和自适应控制器,其中:被控对象控制器的输入包括:由系数矩阵联系的模型跟随直接自适应控制输入(以下简称“自适应控制输入”)和故障控制输入;故障控制器将故障的影响以控制输入的形式体现在控制项中,根据作动器故障情况的不同,体现为控制输入时的值也不同;自适应控制器包含处理故障输入的控制项,并根据模型跟随的思想包含被控对象状态反馈、参考模型状态前馈等项。
所述的自适应控制输入为up, 其中
σ为系数矩阵,
σ=diag{σ1,…,σm}
u为自适应控制器,
为故障控制器, 对应常见的作动器故障的控制量取值为:
其中:tj表示第j个作动器发生故障的时刻,xm的系数矩阵K0是常增益阵,在其它增益阵皆时变的情况下,常增益阵K0有利于增加系统鲁棒性;v项用以抵消故障影响,是u的核心。自适应控制增益阵C0、G0及自适应控制向量v的计算属于直接自适应方法的范畴。通过在线更新C0、G0、v的参数,使u对故障有自适应能力。
图2为自适应控制器u的结构图(与式(a)一致)。虚线框中的C0、G0、v是自适应算法所要得到的目标,为在线更新的控制矩阵和控制向量,其更新依据为粗实线框中的自适应增益阵更新率
第三步、求解式(a)中自适应增益阵C0、G0和增益向量v的更新律
(I)定义输出误差e,e=yp-ym=Cpxp-Cmxm;
(II)选择自适应常数增益γ1、γ2、γ3;
(III)确定对称正定矩阵P:
①运用极点配置思想,选任意稳定矩阵Ae,维数同Am,其中,Ae满足误差动力学
其中
②选任意对称正定矩阵Q;
③使P满足如下方程
(IV)自适应增益阵和增益向量的更新律 取值为
第四步、联立上述方程(a),(c)等,自变量包括被控对象状态xp,参考模型状态xm,自适应控制器中的自适应增益阵C0、G0和自适应增益向量v,在线求解各自变量。
说明1:构造Lyapunov函数
V=eTPe+tr[ΔGTΔG/γ1]+tr[ΔψTΔψ/γ2]+ΔvTΔv/γ3≤0,可得误差系统(b)是渐近稳定的。
说明2:自适应增益阵和增益向量更新过程所需的各参数中,正定矩阵P可通过事先设定的Ae和Q计算得到,um、xm都为已知的参考模型参数,只有xp需要在线量测。自适应律的求解不需要系统的参数,是直接自适应法的很大优点。
实施效果评估:在高度40000英尺、速度0.8Ma巡航模态下,求取被控对象B747-200飞机横侧向动力学模型。其中,状态向量xp为侧滑角、滚转角速率、偏航角速率和滚转角,控制向量up为方向舵偏度和副翼偏度,Cp为四阶单位矩阵,
参考模型中,xm、um的参数同被控对象,Cm为四阶单位矩阵,
初始化被控对象和参考模型的状态为xm(0)=xp(0)=[0,0,0,0]T。仿真结果中,虚线(标记为1)表示参考模型的响应,实线(标记为2)表示用本发明模型跟随直接自适应方法重构后被控对象的响应,点画线(标记为3)表示用没有自适应能力的模型跟随方法控制下的被控对象的响应。
设置方向舵在第2秒时卡死在+10°位置上,图4-图7分别是侧滑角、滚转角速率、偏航角速率和滚转角的响应曲线。设置副翼在第2秒时卡死在+15°位置上,图8-图11分别是侧滑角、滚转角速率、偏航角速率和滚转角的响应曲线。
由图4-图7可见,被控对象的方向舵故障发生在动态响应的调节过程,在系统进入稳态之前就设置故障,意在验证本文方法的重构能力。方向舵卡死在+10°位置上后,没有自适应能力的模型跟随方法控制下的对象的各状态均出现大幅震荡,远远偏离参考模型的响应;用本文方法重构后的对象的各状态可在3秒内完成对参考模型的再次跟随,图4中侧滑角的跟随情况受故障影响很小,始终处于较好的跟随状态,图7中偏航角速率的响应在故障发生后出现短暂波峰,是因方向舵偏转直接影响着航向的改变。
由图8-图11可见,被控对象的副翼故障发生时间亦选择在调节过程中,没有自适应能力的模型跟随方法控制下的对象的各状态均大幅震荡,而用本文方法重构后的对象的各状态牢牢跟随着参考模型,图8和图10中侧滑角和偏航角速率的响应曲线与参考模型几乎重合。
基于直接自适应控制重构的大型民用飞机飞行控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。

















动态评分
0.0