







专利摘要
本发明公开了一种用于工业水槽液位串级预测控制系统的一致性约束方法,1)分别建立外回路PFC控制器和内回路PID控制器的控制结构模型;2)判断外回路PFC控制器和内回路PID控制器是否约束一致;3)采用约束回退算法,将内回路PID控制器约束预先加载于外回路PFC控制律中,并获得外回路PFC控制器优化计算时新约束条件集;4)外回路PFC控制器在新约束条件集下进行优化计算,获得内回路PID控制器的设定值,并将该设定值提供给内回路PID控制器以跟踪该设定值。本发明通过对PFC-PID串级控制回路中出现的底层回路控制器饱和及上下层约束不一致问题,通过约束回退计算,使得优化所得设定值对于底层回路切实可行,改善系统的控制性能,提高生产单元经济效益。
权利要求
1.一种用于工业水槽液位串级预测控制系统的一致性约束方法,其特征在于,包括以下步骤:
1)建立用于工业水槽液位串级预测控制系统的外回路PFC控制器的控制结构模型和内回路PID控制器的控制结构模型;
2)判断外回路PFC控制器和内回路PID控制器是否约束一致,如果一致则进行步骤3),如果不一致,则返回步骤1)重新建立外回路PFC控制器的控制结构模型和内回路PID控制器的控制结构模型;
3)在外回路PFC控制器和内回路PID控制器约束一致的情况下,采用约束回退算法,将内回路PID控制器约束预先加载于外回路PFC控制律的计算过程中,并获得外回路PFC控制器在进行优化计算时新的约束条件集;
4)外回路PFC控制器在新的约束条件集下进行优化计算,获得内回路PID控制器的设定值,并将该设定值提供给内回路PID控制器,使内回路跟踪该设定值。
2.根据权利要求1所述的一种用于工业水槽液位串级预测控制系统的一致性约束方法,其特征是:在步骤1)中,建立用于工业水槽液位串级预测控制系统的外回路PFC控制器的控制结构模型和内回路PID控制器的控制结构模型,
所述外回路PFC控制器的控制结构模型为
式中,下标p表示过程;
uext(k)为k时刻外回路PFC预测函数控制器的输出;
SPext为外回路PFC预测函数控制器的设定值;
yp(k)和yp(k+h)分别表示k时刻与k+h时刻工业水槽液位串级预测控制系统的输出;
表示k时刻偏差εext(k)=SPext-yp(k)到k+1时刻偏差εext(k+1)=SPext-yp(k+1)的衰减系数;
Ts为采样周期;
CLTR为一阶离散系统闭环响应时间,即到达95%设定值的时间;
为外回路PFC预测函数控制模型衰减系数;
Tm为模型时间常数;
Kmext为模型增益;
令内回路采用比例P控制,设控制器增益为Kint,则所述内回路PID控制器的控制结构模型为
uint=(SPint-yp(k))Kint (1-2)
式中,uint为内回路控制器的输出;
SPint为内回路的设定值;
yp(k)为k时刻工业水槽液位串级预测控制系统的输出;
Kint为内回路控制器增益。
3.根据权利要求2所述的一种用于工业水槽液位串级预测控制系统的一致性约束方法,其特征是:在步骤2)中,判断外回路PFC控制器和内回路PID控制器是否约束一致,采用以下方法,
①内回路采用比例P控制时,对于内回路PID控制器的控制结构模型(1-2)表示的内回路比例控制律,人为设置一内回路的设定值SP′int,并令该设定值SP′int>SPint,则相应的内回路控制律为
u′int=(SP′int-yp(k))Kint (2-1)
式中,uint′为内回路设定值取SPint′时,内回路控制器的输出值;
②将内回路控制律(2-1)与内回路PID控制器的控制结构模型(1-2)相减,得到
u′int-uint=(SP′int-yp(k))Kint-(SPint-yp(k))Kint (2-2)
即
u′int-uint=(SP′int-SPint)Kint (2-3)
③当Kint>0时,由于已假定SP′int>SPint,故u′int(k)-uint(k)>0,即当SP′int>SPint时,有u′int(k)>uint(k);
当Kint<0时,由于已假定SP′int>SPint,故u′int(k)-uint(k)<0,即当SP′int>Spint时,有u′int(k)<uint(k);
因此,对于一个比例P控制的工业水槽液位串级预测控制系统,控制器输出与设定值严格单调;
④对于PFC-PID串级传导控制回路,外回路控制器输出即为内回路控制器的设定值,即
uext(k)=SPint(2-4)
通过内回路控制器输出与外回路控制器输出的严格单调,则当umin≤uint≤umax时,Ξ(umin)≤uext≤Ξ(umax);
即外回路PFC控制器的操作约束与内回路PID控制器的操作约束是一致的。
4.根据权利要求3所述的一种用于工业水槽液位串级预测控制系统的一致性约束方法,其特征是:在步骤3)中,将内回路PID控制器的操作约束预先加载于外回路PFC控制律的计算过程中,并获得外回路PFC控制器在进行优化计算时的约束条件集,采用以下方法,
建立外回路PFC控制器的优化模型
s.t.Δp=[Δp1,…,Δpn]T
Δm=[Δm1,…,Δmn]T (3-1)
Δp=(SPext-yp(k))(1-λexth)
Δm=ym(k)amexth+u(k)Kmext(1-amexth)-ym(k)
uext min≤uext≤uext max
SPext min≤SPext≤SPext max
式中, 为优化目标函数,n为变量个数;
在优化时域内,使得过程输出增量Δp和模型预测输出增量Δm的偏差最小,即可得到外回路PFC控制器的控制律;
uext min≤uext≤uext max和SPextmin≤SPext≤SPextmax分别表示uext和SPext的约束条件,其中uext min、uext max分别表示uext的最小值与最大值,SPext min、SPext max分别表示SPext的最小值与最大值;
由于外回路PFC控制器的操作约束与内回路PID控制器的操作约束是一致的,故当umin≤uint≤umax时,Ξ(umin)≤uext≤Ξ(umax);
将内回路PID控制器的操作约束预先加载于外回路PFC控制律的计算过程中,即以Ξ(umin)≤uext≤Ξ(umax)为约束条件,对式(3-1)进行优化计算,则
由此获得新的约束条件max{uext min,Ξ(umin)}≤uext≤min{uext max,Ξ(umax)}。
5.根据权利要求4所述的一种用于工业水槽液位串级预测控制系统的一致性约束方法,其特征是:在步骤4)中,外回路PFC控制器在新的约束条件集下进行优化计算,获得内回路PID控制器的设定值,并将该设定值提供给内回路PID控制器,使内回路跟踪该设定值,其方法如下,
在新的约束条件下,对外回路PFC控制器进行优化计算,其优化模型为
s.t.Δp=[Δp1,…,Δpn]T
Δm=[Δm1,…,Δmn]T (4-1)
Δp=(SPext-yp(k))(1-λexth)
Δm=ym(k)amexth+u(k)Kmext(1-amexth)-ym(k)
max{uext min,Ξ(umin)}≤uext≤min{uext max,Ξ(umax)}
SPextmin≤SPext≤SPextmax
求解(4-1)可得优化目标函数 取得最小值Jmin时的uext即为该优化问题的最优解uextopt,将其作为PID控制器的设定值SPint提供给内回路。
6.根据权利要求2所述的一种用于工业水槽液位串级预测控制系统的一致性约束方法,其特征是:在步骤1)中,当外回路控制器为PFC预测函数控制器时,首先采用PFC算法计算控制器结构模型,
①建立一阶离散系统,当其采样周期为Ts,过程增益为Kp,则过程输出为
CV(k)=yp(k)=yp(k-1)ap+(1-ap)Kpu(k-1)(1-3)
式中,下标p表示过程;
CV(k)为k时刻的控制变量;
yp(k)为k时刻工业水槽液位串级预测控制系统的输出;
为过程衰减系数;
Tp为过程时间常数;
u(k-1)为k-1时刻PFC预测函数控制器的输出;
建立模型输出函数为
ym(k)=ym(k-1)am+(1-am)Kmu(k-1)(1-4)
式中,下标m表示模型;
ym(k)为k时刻模型的输出;
为模型衰减系数;
Tm为模型时间常数;
Km为模型增益;
②在优化时域内,使得过程输出增量Δp和模型预测输出增量Δm的偏差最小,在此采用一步优化,即令Δp=Δm,
其中,
Δp=ε(k)-ε(k+h)
=ε(k)-ε(k)λh
=ε(k)(1-λh)
=(SP-yp(k))(1-λh)(1-5)
式中,SP为设定值;
ε(k)=SP-yp(k)表示设定值SP与k时刻工业水槽液位串级预测控制系统输出yp(k)的偏差;
ε(k+h)=SP-yp(k+h)=ε(k)λh表示设定值SP与k+h时刻工业水槽液位串级预测控制系统输出yp(k+h)的偏差;
表示偏差ε从k时刻到k+1时刻的衰减系数;
λh是λ的h次幂,表示偏差ε从k时刻到k+h时刻的衰减系数;
对于该一阶离散系统,取工业水槽液位串级预测控制系统的系统时间常数 CLTR为一阶离散系统闭环响应时间,即到达95%设定值的时间;
且
Δm=ym(k+h)-ym(k)(1-6)
式中,ym(k+h)为k+h时刻模型预测输出,由自由响应ymFree(k+h)和强迫响应ymForce(k+h)组成,即
ym(k+h)=ymFree(k+h)+ymForce(k+h)(1-7)
其中,
式中,ymFree(k+h)表示自由响应,ymForce(k+h)表示强迫响应;
故,
由Δp=Δm得
整理后得到PFC控制器的一般形式
③由式(1-12)可得,外回路PFC控制器的控制结构模型
式中,uext(k)为k时刻外回路PFC预测函数控制器的输出;
SPext为外回路PFC预测函数控制器的设定值;
yp(k)和yp(k+h)分别表示k时刻与k+h时刻工业水槽液位串级预测控制系统的输出;
表示k时刻偏差εext(k)=SPext-yp(k)到k+1时刻偏差εext(k+1)=SPext-yp(k+1)的衰减系数, CLTR为一阶离散系统闭环响应时间,即到达95%设定值的时间;
为外回路PFC预测函数控制模型衰减系数;
Tm为模型时间常数;
Kmext为模型增益;
④令内回路采用比例P控制,设控制器增益为Kint,由此获得内回路PID控制器的控制结构模型
uint=(SPint-yp(k))Kint (1-2)
式中,内回路采用比例P控制;
uint为内回路控制器的输出;
SPint为内回路的设定值;
yp(k)为k时刻工业水槽液位串级预测控制系统的输出;
Kint为内回路控制器增益。
说明书
技术领域
本发明涉及一种一致性约束方法,尤其是一种用于工业水槽液位串级预测控制系统的一致性约束方法。
背景技术
工业生产过程中,由于执行机构和生产装置的物理特性所限,如阀门的线性工作量程、阀门的调节速率、油罐的容积和液位限制等,控制器存在一定范围的可操作性,并要求过程输出在一定的安全范围内。同时,为了在保证产品质量的前提下最大化企业经济效益,通常希望在一定概率约束范围内尽可能的使操作点靠近约束限,实现卡边操作。因此,根据约束的强制性和优化性,通常设定硬约束和软约束两级约束策略。生产操作的基本要求是保证各变量不违背硬约束的限制,否则将采取停车停产等应急措施以防止事故的发生。一旦发生停车,这对于连续作业的流程工业企业将损失数百万元甚至更多的经济效益。因此,企业通常将停车作为生产事故处理,而尽可能避免其发生。对于软约束的限制,如果生产过程操作点超限,则会报警以提醒操作工程师对生产工况进行调节。
对于传统的PID控制方案,操作工程师根据生产经验,保证操作点不违背硬约束的限制。操作工程师的生产经验及对生产过程的理解对控制的效果影响很大。对于软约束和经济性能,由于缺少必要的确定性模型信息,难以保证其最优化,通常的做法是为保证安全性而以损失经济效益为代价,因此操作过程会在一个较大的范围内波动,并且距操作软约束预留较大的退避值。
预测控制(Model Predictive Control,以下简称MPC)作为先进控制策略的典型代表,近些年来已广泛应用于石油、化工、造纸、制药等流程工业。预测控制的主要特性之一是可以方便的处理约束问题。根据对生产系统辨识而获取的过程模型,对未来过程输出进行预测,同时将过程输出和模型预测输出反馈给控制器进行优化控制,改善控制效果,压缩过程输出波动,进而在保证不违背硬约束的前提下,允许一定概率范围内的软约束超限,使操作点进一步靠近约束限以实现卡边控制,最大化经济效益。因此可以说,预测控制对于经济效益的提高主要取决于两方面因素:第一,改善控制效果以减小生产波动;第二,合理处理退避问题以使操作点靠近约束限。由此可见,无论对于生产的安全性,还是对于企业经济效益的提高,合理处理过程约束都是流程工业中一个重要的问题。
预测函数控制(Predictive Functional Control,以下简称PFC)被称为第三代预测控制器。由于其具有算法简单、不需要处理二次型优化问题、计算量小等特点,因此可以方便的嵌入DCS(Distributed Control System,以下简称DCS)或PLC(Programmable Logic Controller,以下简称PLC)中,不仅可以处理流程工业等慢响应过程,同时也有效的应用于快速控制过程,如机器人、航空器、武器控制系统等。在石油、化工等流程工业中,较之一般的二次型预测控制算法,PFC能够避免求解二次型优化问题,其控制结构简单,因而更加贴近于PID控制器而可以直接应用于底层基础回路动态控制。
PFC-PID串级控制回路与常用于工业过程中的一般性MPC-PID串级控制回路的控制结构一致。由于流程工业中95%以上的控制方案都采用的PID控制算法并且已经有几十年甚至近百年的应用历史,采用MPC(PFC)-PID串级控制结构兼顾了兼容性和最优性,因而更容易被工业企业和操作工程师所接受。
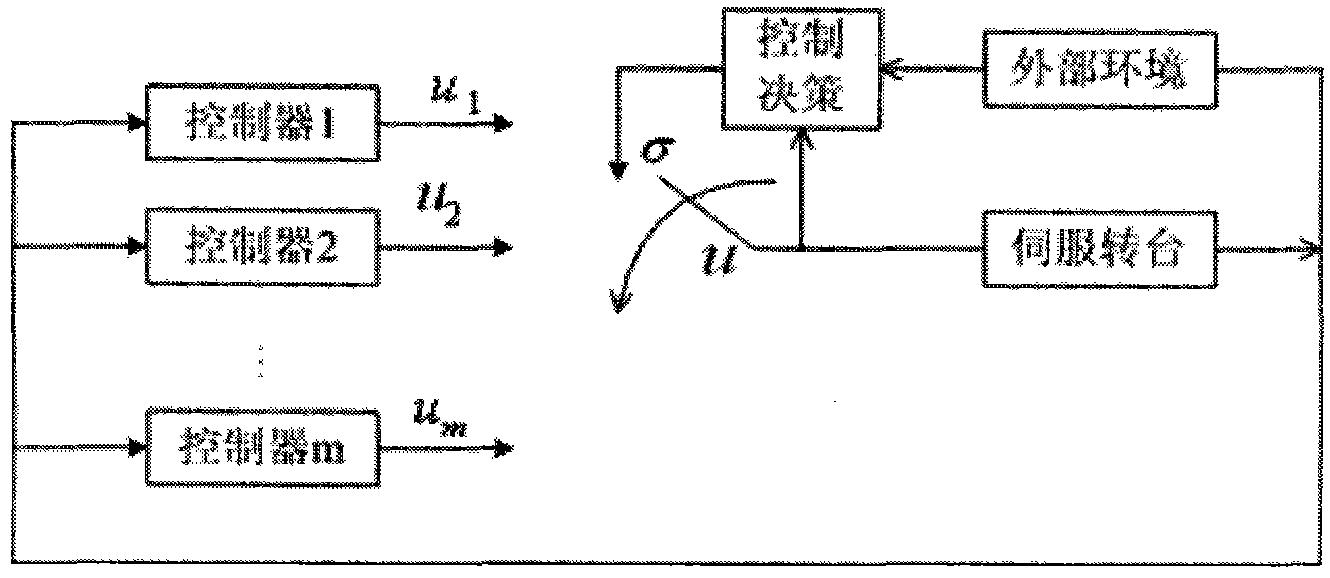
这一类PFC-PID串级控制回路的特点是,内回路PID控制器和外回路PFC控制器控制的对象为同一过程,这在工业过程中是一种典型的控制方案,如错误!书签自引用无效。所示。对于外回路控制器来说,内回路控制器的作用是“透明”的,因此称这种串级控制为“传导控制”。
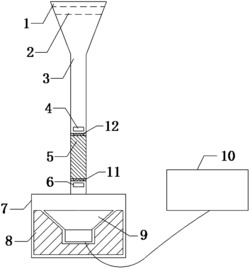
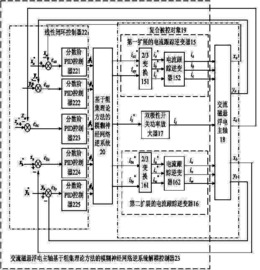
液位控制是工业生产中典型的过程控制问题,对液位准确的测量和有效控制是一些设备优质高产、低耗和安全生产的重要指标。针对水槽液位系统广义对象,采用一阶惯性加纯滞后来近似等效,考虑到其时间常数和滞后时间都比较大,故采用鲁棒性强、易于工程实施的预测函数控制策略。工业水槽液位控制系统主要包括水箱控制单元、DCS控制机柜和上位机组态与监控环境。在该系统下设计PFC-PID传导控制回路,主要包括外回路PFC控制器和内回路PID控制器,其控制流程如图2所示。内回路采用比例P控制来处理过程动态特性,外回路采用无显式积分器的PFC控制策略跟踪设定值。外回路通过优化计算为内回路提供设定值,内回路通过动态控制跟踪该设定值。但是,由于各级回路之间的约束不一致问题,难以保证外回路优化结果的正确性和可行性。针对这一问题,对多层结构预测函数控制进行约束一致性分析,通过串级回路的回退计算,将内回路约束逐级传递至外回路,从而保证优化设定值对于基础回路动态控制切实可行。通过仿真分析验证了约束回退计算方法对于控制效果的提高。
发明内容
为了克服现有技术的不足,本发明提供了一种针对PFC-PID串级控制回路中出现的底层回路控制器饱和及上下层约束不一致问题,保证外回路控制器计算出正确的最优设定值,防止由于错误计算导致的波动、超调等现象,改善控制性能,提高生产单元经济效益的用于工业水槽液位串级预测控制系统的一致性约束方法。
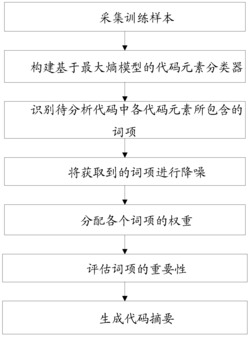
本发明技术方案是:一种用于工业水槽液位串级预测控制系统的一致性约束方法,包括以下步骤:
1)建立用于工业水槽液位串级预测控制系统的外回路PFC控制器的控制结构模型和内回路PID控制器的控制结构模型;
2)判断外回路PFC控制器和内回路PID控制器是否约束一致,如果一致则进行步骤3),如果不一致,则返回步骤1)重新建立外回路PFC控制器的控制结构模型和内回路PID控制器的控制结构模型;
3)在外回路PFC控制器和内回路PID控制器约束一致的情况下,采用约束回退算法,将内回路PID控制器约束预先加载于外回路PFC控制律的计算过程中,并获得外回路PFC控制器在进行优化计算时新的约束条件集;
4)外回路PFC控制器在新的约束条件集下进行优化计算,获得内回路PID控制器的设定值,并将该设定值提供给内回路PID控制器,使内回路跟踪该设定值。
进一步设置为,在步骤1)中,建立用于工业水槽液位串级预测控制系统的外回路PFC控制器的控制结构模型和内回路PID控制器的控制结构模型,
所述外回路PFC控制器的控制结构模型为
式中,下标p表示过程;
uext(k)为k时刻外回路PFC预测函数控制器的输出;
SPext为外回路PFC预测函数控制器的设定值;
yp(k)和yp(k+h)分别表示k时刻与k+h时刻工业水槽液位串级预测控制系统的输出;
表示k时刻偏差εext(k)=SPext-yp(k)到k+1时刻偏差εext(k+1)=SPext-yp(k+1)的衰减系数;
Ts为采样周期;
CLTR为一阶离散系统闭环响应时间,即到达95%设定值的时间;
为外回路PFC预测函数控制模型衰减系数;
Tm为模型时间常数;
Kmext为模型增益;
令内回路采用比例P控制,设控制器增益为Kint,则所述内回路PID控制器的控制结构模型为
uint=(SPint-yp(k))Kint (1-2)
式中,uint为内回路控制器的输出;
SPint为内回路的设定值;
yp(k)为k时刻工业水槽液位串级预测控制系统的输出;
Kint为内回路控制器增益。
进一步设置为,在步骤2)中,判断外回路PFC控制器和内回路PID控制器是否约束一致,采用以下方法:
①内回路采用比例P控制时,对于内回路PID控制器的控制结构模型(1-2)表示的内回路比例控制律,人为设置一内回路的设定值SP′int,并令该设定值SP′int>SPint,则相应的内回路控制律为
u′int=(SP′int-yp(k))Kint (2-1)
式中,uint′为内回路设定值取SPint′时,内回路控制器的输出值;
②将内回路控制律(2-1)与内回路PID控制器的控制结构模型(1-2)相减,得到
u′int-uint=(SP′int-yp(k))Kint-(SPint-yp(k))Kint (2-2)
即
u′int-uint=(SP′int-SPint)Kint (2-3)
③当Kint>0时,由于已假定SP′int>SPint,故u′int(k)-uint(k)>0,即当SP′int>SPint时,有u′int(k)>uint(k);
当Kint<0时,由于已假定SP′int>SPint,故u′int(k)-uint(k)<0,即当SP′int>SPint时,有u′int(k)<uint(k);
因此,对于一个比例P控制的工业水槽液位串级预测控制系统,控制器输出与设定值严格单调;
④对于PFC-PID串级传导控制回路,外回路控制器输出即为内回路控制器的设定值,即
uext(k)=SPint (2-4)
通过内回路控制器输出与外回路控制器输出的严格单调,则当umin≤uint≤umax时,Ξ(umin)≤uext≤Ξ(umax);
即外回路PFC控制器的操作约束与内回路PID控制器的操作约束是一致的。
进一步设置为,在步骤3)中,将内回路PID控制器的操作约束预先加载于外回路PFC控制律的计算过程中,并获得外回路PFC控制器在进行优化计算时的约束条件集,采用以下方法:建立外回路PFC控制器的优化模型
s.t.Δp=[Δp1,…,Δpn]T
Δm=[Δm1,…,Δmn]T (3-1)
Δp=(SPext-yp(k))(1-λexth)
Δm=ym(k)amexth+u(k)Kmext(1-amexth)-ym(k)
uextmin≤uext≤uextmax
SPextmin≤SPext≤SPextmax
式中, 为优化目标函数,n为变量个数;
在优化时域内,使得过程输出增量Δp和模型预测输出增量Δm的偏差最小,即可得到外回路PFC控制器的控制律;
uextmin≤uext≤uextmax和SPextmin≤SPext≤SPextmax分别表示uext和SPext的约束条件,其中uextmin、uextmax分别表示uext的最小值与最大值,SPextmin、SPextmax分别表示SPext的最小值与最大值;
由于外回路PFC控制器的操作约束与内回路PID控制器的操作约束是一致的,故当umin≤uint≤umax时,Ξ(umin)≤uext≤Ξ(umax);
将内回路PID控制器的操作约束预先加载于外回路PFC控制律的计算过程中,即以Ξ(umin)≤uext≤Ξ(umax)为约束条件,对式(3-1)进行优化计算,则
由此获得新的约束条件max{uextmin,Ξ(umin)}≤uext≤min{uextmax,Ξ(umax)}。
进一步设置为,在步骤4)中,外回路PFC控制器在新的约束条件集下进行优化计算,获得内回路PID控制器的设定值,并将该设定值提供给内回路PID控制器,使内回路跟踪该设定值,其方法如下:
在新的约束条件下,对外回路PFC控制器进行优化计算,其优化模型为
s.t.Δp=[Δp1,…,Δpn]T
Δm=[Δm1,…,Δmn]T (4-1)
Δp=(SPext-yp(k))(1-λexth)
Δm=ym(k)amexth+u(k)Kmext(1-amexth)-ym(k)
max{uextmin,Ξ(umin)}≤uext≤min{uextmax,Ξ(umax)}
SPextmin≤SPext≤SPextmax
求解(4-1)可得优化目标函数 取得最小值Jmin时的uext即为该优化问题的最优解uextopt,将其作为PID控制器的设定值SPint提供给内回路。
再进一步设置为,在步骤1)中,当外回路控制器为PFC预测函数控制器时,首先采用PFC算法计算控制器结构模型;
①建立一阶离散系统,当其采样周期为Ts,过程增益为Kp,则过程输出为
CV(k)=yp(k)=yp(k-1)ap+(1-ap)Kpu(k-1) (1-3)
式中,下标p表示过程;
CV(k)为k时刻的控制变量;
yp(k)为k时刻工业水槽液位串级预测控制系统的输出;
为过程衰减系数;
Tp为过程时间常数;
u(k-1)为k-1时刻PFC预测函数控制器的输出;
建立模型输出函数为
ym(k)=ym(k-1)am+(1-am)Kmu(k-1) (1-4)
式中,下标m表示模型;
ym(k)为k时刻模型的输出;
为模型衰减系数;
Tm为模型时间常数;
Km为模型增益;
②在优化时域内,使得过程输出增量Δp和模型预测输出增量Δm的偏差最小,在此采用一步优化,即令Δp=Δm
其中,
Δp=ε(k)-ε(k+h)
=ε(k)-ε(k)λh
=ε(k)(1-λh)
=(SP-yp(k))(1-λh) (1-5)
式中,SP为设定值;
ε(k)=SP-yp(k)表示设定值SP与k时刻工业水槽液位串级预测控制系统输出yp(k)的偏差;
ε(k+h)=SP-yp(k+h)=ε(k)λh表示设定值SP与k+h时刻工业水槽液位串级预测控制系统输出yp(k+h)的偏差;
表示偏差ε从k时刻到k+1时刻的衰减系数;
λh是λ的h次幂,表示偏差ε从k时刻到k+h时刻的衰减系数;
对于该一阶离散系统,取工业水槽液位串级预测控制系统的系统时间常数 CLTR为一阶离散系统闭环响应时间,即到达95%设定值的时间;
且
Δm=ym(k+h)-ym(k) (1-6)
式中,ym(k+h)为k+h时刻模型预测输出,由自由响应ymFree(k+h)和强迫响应ymForce(k+h)组成,即
ym(k+h)=ymFree(k+h)+ymForce(k+h) (1-7)
其中,
式中,ymFree(k+h)表示自由响应,ymForce(k+h)表示强迫响应;
故,
由Δp=Δm得
整理后得到PFC控制器的一般形式
③由式(1-12)可得,外回路PFC控制器的控制结构模型
式中,uext(k)为k时刻外回路PFC预测函数控制器的输出;
SPext为外回路PFC预测函数控制器的设定值;
yp(k)和yp(k+h)分别表示k时刻与k+h时刻工业水槽液位串级预测控制系统的输出;
表示k时刻偏差εext(k)=SPext-yp(k)到k+1时刻偏差εext(k+1)=SPext-yp(k+1)的衰减系数, CLTR为一阶离散系统闭环响应时间,即到达95%设定值的时间;
为外回路PFC预测函数控制模型衰减系数;
Tm为模型时间常数;
Kmext为模型增益;
④令内回路采用比例P控制,设控制器增益为Kint,由此获得内回路PID控制器的控制结构模型
uint=(SPint<
用于工业水槽液位串级预测控制系统的一致性约束方法专利购买费用说明
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
![]()
















动态评分
0.0