






专利摘要
本发明涉及一种用于制造致动器的方法,所述方法包括:形成导电材料的实质上平面致动器装置,所述装置并入有外框架、附接到所述外框架的固定框架、平行于所述固定框架而安置的可移动框架、将所述可移动框架耦合到所述外框架以用于相对于所述外框架及所述固定框架的共面、直线移动的运动控制挠曲及并入有多个相互交叉的齿的致动器,所述致动器的固定部分附接到所述固定框架且所述致动器的移动部分附接到所述可移动框架;将所述可移动框架移动到部署位置,所述部署位置与所述固定框架共面、平行且与所述固定框架间隔开所选择的距离;及将所述可移动框架固定在所述部署位置处以用于相对于所述固定框架的实质上直线、垂直移动。
权利要求
1.一种用于制造平面致动器装置的方法,所述方法包含:
形成外框架;
形成一个或多个致动器,所述一个或多个致动器中的每一者耦合至所述外框架且包含:
固定框架,其附接到所述外框架;
可移动框架,其平行于所述固定框架且与所述固定框架共面而安置;
运动控制挠曲,其将所述可移动框架耦合到所述外框架以使得所述可移动框架具有相对于所述外框架及所述固定框架的共面、直线移动;及
多个相互交叉的齿,其中所述多个相互交叉的齿的一部分附接到所述固定框架且所述多个相互交叉的齿的另一部分附接到所述可移动框架;
其中所述固定框架和所述可移动框架间隔开约所述齿的长度;
将所述可移动框架移动到部署位置,所述部署位置与所述固定框架共面、平行且与所述固定框架间隔开所选择的距离,所述所选择的距离大于所述齿的所述长度且小于所述齿的所述长度的二倍;及,
将所述可移动框架机械地和/或粘合地固定在所述部署位置中以用于朝向和远离所述固定框架的直线移动。
2.根据权利要求1所述的用于制造平面致动器装置的方法,其中将所述可移动框架移动到部署位置包含:
在所述外框架上形成过中心闩及支点;
形成以部署挠曲耦合到所述可移动框架的部署杠杆,所述部署杠杆在上端处具有经配置以用于所述过中心闩的凸轮致动及与所述过中心闩的闩锁啮合的表面,且在下端处具有与所述支点啮合以用于所述部署杠杆围绕所述支点的旋转移动的槽口;及,
围绕所述支点旋转所述部署杠杆,使得所述部署杠杆致使所述部署挠曲将所述可移动框架推动到所述部署位置,且所述部署杠杆的所述上端与所述过中心闩啮合且将所述可移动框架闩锁在所述部署位置中。
3.根据权利要求2所述的用于制造平面致动器装置的方法,其进一步包含形成邻近所述部署杠杆的所述上端附接到所述部署挠曲的拉环,及使用所述拉环直接使所述部署杠杆围绕所述支点旋转。
4.根据权利要求1所述的用于制造平面致动器装置的方法,其中将所述可移动框架移动到部署位置包含:
在所述外框架中形成承窝,所述承窝包括其内表面上的多个径向凸出部;
在所述承窝内同心地形成球,所述球耦合到所述运动控制挠曲且包括分别与所述承窝的所述径向凸出部互补的多个压痕;及,
在将所述可移动框架移动到所述部署位置时使用所述承窝上的所述径向凸出部及所述球上的所述压痕以减少移动所述可移动框架所需的力,且使得所述可移动框架直线地且垂直于所述固定框架而移动。
5.根据权利要求1所述的用于制造平面致动器装置的方法,其中将所述可移动框架移动到部署位置包含:
在所述外框架中形成矩形承窝;
形成同心地安置在所述矩形承窝内的矩形球,所述矩形球通过球簧连接到所述外框架且通过所述运动控制挠曲连接到所述可移动框架;及,
当将所述可移动框架移动到所述部署位置时使用所述矩形球及所述矩形承窝,使得所述可移动框架直线地且垂直于所述固定框架而移动。
6.根据权利要求1所述的用于制造平面致动器装置的方法,其中将所述可移动框架移动到部署位置包含:
在所述外框架上形成弹性悬臂,所述弹性悬臂具有安置在其上的直立柱;
形成通过部署挠曲耦合到所述可移动框架的衬垫,所述衬垫具有穿过其的开口及安置在所述直立柱的上表面下方的下表面,所述开口在大小上对应于所述直立柱的圆周外围;
将向下力施加到所述弹性悬臂,以将所述直立柱的所述上表面移动至所述衬垫的所述下表面下方;
朝向所述直立柱推动所述衬垫,使得所述衬垫致使所述部署挠曲将所述可移动框架推动到所述部署位置,且所述衬垫中的所述开口在所述直立柱上方居中;及,
释放所述弹性悬臂上的所述向下力,使得所述直立柱向上滑动到所述衬垫中的所述开口中且将所述可移动框架固定在所述部署位置中。
7.根据权利要求1所述的用于制造平面致动器装置的方法,其中将所述可移动框架移动到部署位置包含:
形成通过部署挠曲耦合到所述可移动框架的啮合衬垫;
提供彼此相对间隔而安置的一对制动件,每一制动件具有相对于另一制动件的斜坡双边对称安置的斜坡;
将所述啮合衬垫安置在所述制动件之间;及,
朝向彼此推动所述制动件,使得所述啮合衬垫的边缘分别啮合所述斜坡中的对应一者且致使所述啮合衬垫横向移动,且进而致使所述部署挠曲将所述可移动框架推动到所述部署位置。
8.根据权利要求1所述的用于制造平面致动器装置的方法,其中将所述可移动框架移动到部署位置包含:
形成通过部署挠曲耦合到所述可移动框架的部署衬垫;
提供定位器,所述定位器具有从其直立的斜面柱;及,
朝向所述定位器向下推动所述致动器装置,使得所述部署衬垫的边缘与所述斜面柱的斜面表面接触,且致使所述部署挠曲横向移动且进而将所述可移动框架推动到所述部署位置。
9.根据权利要求1所述的用于制造平面致动器装置的方法,其中将所述可移动框架移动到部署位置包含:
形成通过部署挠曲耦合到所述可移动框架的部署载物台,所述部署载物台具有相对的上表面及下表面;
提供彼此相对间隔的一对制动件,每一制动件具有相对于另一制动件的弹性倾斜运动转换器双边对称安置的弹性倾斜运动转换器;
将所述部署载物台的所述下表面放置在所述制动件中的下部一者的所述运动转换器的上端上;及,
推动所述制动件中的上部一者的所述运动转换器的下端使其与所述部署载物台的所述上表面接触,使得所述部署载物台横向移动,且进而致使所述部署挠曲将所述可移动框架推动到所述部署位置。
10.根据权利要求1所述的用于制造平面致动器装置的方法,其中将所述可移动框架移动到部署位置包含:
形成通过部署挠曲耦合到所述可移动框架的部署载物台,所述部署载物台具有横向表面;
提供顶部制动件及底部制动件,所述底部制动件具有从其直立的柱,所述柱具有安置在其上端处的斜面表面及所述柱上的横向表面;
将所述致动器装置放置在所述底部制动件的上表面上,使得所述部署载物台的所述横向表面与所述柱的所述横向表面相对地安置;及,
向下推动所述顶部制动件且使其与所述柱的所述斜面表面接触,使得所述底部制动件横向移动,从而致使所述柱的所述横向表面与所述部署载物台的所述横向表面接触,且横向推动所述部署载物台,从而致使所述部署挠曲将所述可移动框架推动到所述部署位置。
11.根据权利要求1所述的用于制造平面致动器装置的方法,其中将所述可移动框架移动到部署位置包含:
形成通过部署挠曲耦合到所述可移动框架的部署衬垫,所述部署衬垫具有横向表面;
提供具有横向可移动载物台的MEMS装置,所述横向可移动载物台具有安置在其上的直立部署栓钉,所述部署栓钉具有与所述部署衬垫的所述横向表面相对地安置的横向表面;及,
致动所述MEMS装置,使得所述横向可移动载物台及部署栓钉横向移动,从而致使所述部署栓钉的所述横向表面与所述部署衬垫的所述横向表面接触,且横向推动所述部署衬垫,从而致使所述部署挠曲将所述可移动框架推动到所述部署位置。
12.根据权利要求1所述的用于制造平面致动器装置的方法,其中将所述可移动框架移动到部署位置包含:
形成通过部署挠曲耦合到所述可移动框架的部署衬垫,所述部署衬垫具有横向表面;
提供定位器,所述定位器具有正热膨胀系数及安置于其上的直立部署栓钉,所述部署栓钉具有与所述部署衬垫的所述横向表面相对地安置的横向表面;及,
加热所述定位器,使得所述定位器及所述部署栓钉横向膨胀,从而致使所述部署栓钉的所述横向表面与所述部署衬垫的所述横向表面接触,且横向推动所述部署衬垫,从而致使所述部署挠曲将所述可移动框架推动到所述部署位置。
13.根据权利要求1所述的用于制造平面致动器装置的方法,其中将所述可移动框架移动到部署位置包含:
形成通过部署挠曲耦合到所述可移动框架的部署衬垫,所述部署衬垫具有横向表面;
提供另一固定框架,所述另一固定框架具有正热膨胀系数及与所述部署衬垫的所述横向表面相对地安置的横向表面;及,
加热所述另一固定框架,使得所述另一固定框架横向膨胀,从而致使所述另一固定框架的所述横向表面与所述部署衬垫的所述横向表面接触,且横向推动所述部署衬垫,从而致使所述部署挠曲将所述可移动框架推动到所述部署位置。
14.根据权利要求1所述的用于制造平面致动器装置的方法,其中将所述可移动框架移动到部署位置包含:
形成通过部署挠曲耦合到所述可移动框架的部署衬垫,所述部署衬垫具有横向表面;
提供定位器,所述定位器具有与所述部署衬垫的所述横向表面相对地安置的横向表面及穿过其横向延伸的孔;及,
将真空施加到所述定位器中的所述孔,使得所述定位器的所述横向表面由所述真空相对于所述部署衬垫的所述横向表面被横向拉动,从而致使所述部署衬垫横向移动且所述部署挠曲将所述可移动框架推动到所述部署位置。
15.根据权利要求1所述的用于制造平面致动器装置的方法,其中将所述可移动框架移动到部署位置包含:
形成通过部署挠曲耦合到所述可移动框架的部署衬垫,所述部署衬垫具有安置在其上的磁体;及,
在所述部署衬垫上的所述磁体上方移动磁场,使得所述部署衬垫横向移动,从而致使所述部署挠曲将所述可移动框架推动到所述部署位置。
16.根据权利要求1所述的用于制造平面致动器装置的方法,其中将所述可移动框架移动到部署位置包含:
形成通过部署挠曲耦合到所述可移动框架的部署载物台;
提供静止载物台,所述静止载物台邻近所述部署载物台且与所述部署载物台间隔开而安置;及,
将电压差施加到所述静止载物台及部署载物台,使得所述部署载物台相对于所述静止载物台横向移动且致使所述部署挠曲将所述可移动框架移动到所述部署位置。
17.一种平面致动器装置,其是根据权利要求1所述的方法而制造的。
18.一种电子装置,其并入有根据权利要求17所述的平面致动器装置。
19.根据权利要求18所述的电子装置,其中所述电子装置包含相机,且其中所述致动器装置包含通过挠曲耦合到所述可移动框架的元件,以使得耦合到所述可移动框架的所述元件具有相对于所述固定框架和所述外框架的共面、直线移动和围绕所述元件的中心轴的共面、旋转移动。
20.一种平面致动器装置,其包含:
外框架;及
一个或多个致动器,所述一个或多个致动器中的每一者耦合至所述外框架且包含:
固定框架,其附接到所述外框架;
可移动框架,其平行于所述固定框架而安置;
运动控制挠曲,其将所述可移动框架耦合到所述外框架以用于所述可移动框架相对于所述外框架及所述固定框架的共面、直线移动;
元件,其通过挠曲耦合到所述可移动框架,以使得耦合到所述可移动框架的所述元件具有相对于所述固定框架和所述外框架的共面、直线移动和围绕所述元件的中心轴的共面、旋转移动;及,
多个相互交叉的齿,所述多个相互交叉的齿的一部分附接到所述固定框架且所述多个相互交叉的齿的另一部分附接到所述可移动框架,
其中所述可移动框架机械地和/或粘合地固定在与所述固定框架共面、平行且与所述固定框架间隔开所选择的距离的部署位置中,以使得所述可移动框架具有相对于所述固定框架的垂直移动,所述所选择的距离大于所述齿的长度且小于所述齿的所述长度的二倍。
21.根据权利要求20所述的平面致动器装置,其进一步包含与过中心闩啮合的部署杠杆,所述过中心闩将所述可移动框架闩锁在所述部署位置中。
22.根据权利要求21所述的平面致动器装置,其进一步包含:
衬垫,其通过部署挠曲耦合到所述可移动框架,所述衬垫具有穿过其的开口;及,
直立柱,其安置在从所述外框架延伸的弹性悬臂上,所述直立柱延伸到所述衬垫的所述开口中且将所述可移动框架闩锁在所述部署位置中。
23.根据权利要求20所述的平面致动器装置,其中所述致动器装置是由导电材料形成。
24.一种电子装置,其并入有根据权利要求20所述的平面致动器装置。
25.根据权利要求24所述的电子装置,其中所述电子装置包含相机。
说明书
技术领域
本发明大体上涉及致动器且更特定来说,涉及(例如)适合于用于小型相机或其它装置的具有运动控制的MEMS致动器及制造所述MEMS致动器的方法。
背景技术
用于小型相机及其它装置中的致动器是众所周知的。此类致动器通常包括音圈,其用于移动透镜,以聚焦、变焦或光学图像稳定。
小型相机用于多种不同电子装置中。例如,小型相机通常使用于蜂窝式电话、膝上型计算机及监视装置中。小型相机可具有许多其它应用。
常常需要减小小型相机的大小。随着电子装置的大小持续减小,小型相机(其为此类电子装置的部分)的大小通常也必须减小。
此外,需要增强此类小型相机的抗冲击性。随着小型相机的大小减小,经常必须在其构造中使用更小更专用的组件。因为此类消费者产品通常遭受实质性违规操作,例如野蛮处置及坠落,所以必须保护小型相机的组件免受与此违规操作相关联的冲击。
因此,需要能够经受冲击及违规操作的用于小型相机及其它装置中的大小减小的致使动器装置以及制造所述大小减小的致动器装置的可靠且成本有效的方法。
发明内容
根据本发明,提供适合于用于多种应用中的线性致动器及制造所述线性致动器的方法。
在一个实施例中,致动器包含实质上平面致动器装置,所述致动器装置由导电材料形成且包含:外框架;固定框架,其附接到所述外框架;可移动框架,其平行于所述固定框架而安置;运动控制挠曲,其将所述可移动框架耦合到所述外框架以用于相对于所述外框架及所述固定框架的共面、直线移动;及致动器,其并入有多个相互较叉的齿,所述致动器的固定部分附接到所述固定框架且所述致动器的移动部分附接到所述可移动框架,其中所述可移动框架固定在与所述固定框架共面、平行且与所述固定框架间隔开所选择的距离的部署位置处以用于相对于所述固定框架的实质上直线、垂直移动。
在另一实施例中,用于制造致动器的方法包含:形成导电材料的实质上平面致动器装置且所述致动器装置包含:外框架;固定框架,其附接到所述外框架;可移动框架,其平行于所述固定框架而安置;运动控制挠曲,其用于将可移动框架耦合到所述外框架以用于相对于所述外框架的所述固定框架的共面、直线移动及致动器,其并入有多个相互交叉的齿,所述致动器的固定部分附接到所述固定框架且所述致动器的移动部分附接到所述可移动框架;接着,将所述可移动框架移动到部署位置,所述部署位置与所述固定框架共面、平行且与所述固定框架间隔开所选择的距离;及将所述可移动框架固定在所述部署位置处以用于相对于所述固定框架的实质上直线、垂直运动。
本发明的范围由权利要求书界定,权利要求书以引用的方式并入本文中。将通过考虑对一个或一个以上实施例的以下详细描述而向所属领域的技术人员提供对实施例的更完全的理解,以及实现其额外优点。将对附图作出参考,将首先简单地对附图进行描述。
附图说明
图1说明根据一实施例的具有致动器装置的电子装置。
图2说明根据一实施例的具有透镜镜筒的小型相机。
图3A说明根据一实施例的具有安置于其内的致动器模块的透镜镜筒。
图3B以分解图说明根据一实施例的透镜镜筒及致动器模块。
图4说明根据一实施例的具有安置于其内的致动器装置的致动器模块。
图5A说明根据一实施例的致动器装置的俯视图。
图5B说明根据一实施例的致动器装置的俯视图。
图6A说明根据一实施例的致动器装置的一部分。
图6B说明根据一实施例的致动器装置的一部分。
图6C说明根据一实施例的平台的一部分。
图6D说明根据一实施例的经定位以安装到致动器装置的可移动透镜的仰视图。
图6E说明根据一实施例的安装到致动器装置的可移动透镜的侧视图。
图7说明根据一实施例的致动器装置的部分。
图8说明根据一实施例的处于部署配置的致动器装置的仰视图。
图9A说明根据一实施例的未被施加任何电压的处于部署配置的致动器装置的一部分。
图9B说明根据一实施例的被施加较小电压的处于部署配置的致动器装置的一部分。
图9C说明根据一实施例的被施加最大电压的处于部署配置的致动器装置的一部分。
图10说明根据一实施例的横向缓冲器组合件。
图11说明根据一实施例的铰链挠曲及运动控制扭转挠曲。
图12说明根据一实施例的内部运动控制铰链。
图13说明根据一实施例的悬臂挠曲。
图14说明根据一实施例的蜿蜒接触挠曲及部署扭转挠曲。
图15说明根据一实施例的部署停止件的俯视图。
图16说明根据一实施例的部署停止件的仰视图。
图17A说明根据一实施例的皮片阻尼器。
图17B说明根据一实施例的在没有施加冲击的情况下安置于上部模块盖与下部模块盖之间的可移动框架。
图17C说明根据一实施例的在施加冲击的情况下安置于上部模块盖与下部模块盖之间的可移动框架。
图17D说明根据一实施例的另一致动器装置的部分俯视图。
图17E说明根据一实施例的致动器装置的的放大俯视图。
图17F说明根据一实施例的致动器装置的外部铰链挠曲、横向缓冲器组合件、单一缓冲器皮片,及联锁缓冲器皮片特征。
图17G及17H说明根据一实施例的外部铰链挠曲。
图17I及17J说明根据一实施例的横向缓冲器组合件。
图17K及17L说明根据一实施例的单一缓冲器皮片及联锁缓冲器皮片的横截面图。
图17M说明根据一实施例的横向缓冲器组合件、单一缓冲器皮片及联锁缓冲器皮片的俯视图。
图17N说明根据一实施例的单一缓冲器皮片及联锁缓冲器皮片的横截面图。
图18说明根据一实施例的球承窝缓冲器。
图19说明根据一实施例的球承窝缓冲器及两个框架铰链。
图20说明根据一实施例的致动器装置。
图21A说明根据一实施例的处于未部署状态中的致动器装置。
图21B说明根据一实施例的处于部署状态中的致动器装置。
图22A说明根据一实施例的处于未部署状态中的致动器装置的部署停止件。
图22B说明根据一实施例的处于部署状态中的部署停止件。
图23说明根据一实施例的致动器装置。
图24说明根据一实施例的致动器。
图25A到25C说明根据一实施例的用于部署致动器装置的方法。
图26说明根据一实施例的用于部署致动器装置的方法。
图27说明根据一实施例的用于部署致动器装置的方法。
图28说明根据一实施例的用于将致动器装置锁定在部署位置中的过中心闩。
图29说明根据一实施例的在用于部署致动器装置的方法中有用的球及承窝。
图30说明根据一实施例的在用于部署致动器装置的方法中有用的另一球及承窝。
图31说明根据一实施例的在用于部署致动器装置及用于将所述致动器装置锁定在部署位置中的方法中有用的凸片及柱。
图32说明根据一实施例的在用于部署致动器装置及用于将所述致动器装置锁定在部署位置中的方法中有用的凸片及柱。
图33说明根据一实施例的用于部署致动器装置的方法。
图34说明根据一实施例的用于部署致动器装置的方法。
图35说明根据一实施例的用于部署致动器装置的方法。
图36说明根据一实施例的用于部署致动器装置的方法。
图37说明根据一实施例的用于部署致动器装置的方法。
图38说明根据一实施例的用于部署致动器装置的方法。
图39说明根据一实施例的用于部署致动器装置的方法。
图40说明根据一实施例的用于部署致动器装置的方法。
图41说明根据一实施例的用于部署致动器装置的方法。
图42说明根据一实施例的用于部署致动器装置的方法。
图43A及43B说明根据一实施例的用于部署致动器装置的方法。
图44说明根据一实施例的用于部署致动器装置及用于将其固定在部署位置中的方法。
图45说明根据一实施例的用于部署致动器装置及用于将其固定在部署位置中的方法。
图46说明根据一实施例的用于部署致动器装置及用于将其固定在部署位置中的方法。
图47说明根据一实施例的用于部署致动器装置及用于将其固定在部署位置中的方法。
图48说明根据一实施例的用于部署致动器装置及用于将其固定在部署位置中的方法。
图49A到49F说明根据一实施例的用于在致动器装置的两个区段之间制造空隙的方法。
图50说明根据一实施例的联锁皮片阻尼器。
图51说明根据一实施例的联锁皮片阻尼器的特征。
图52A到52B说明根据一实施例的联锁皮片阻尼器的其它特征。
图53A到53B说明根据一实施例的联锁皮片阻尼器的其它特征。
通过参考以下详细描述而最佳地理解本发明的实施例及其优点。应了解,相同参考数字用于指示在一个或一个以上图式中说明的相同元件。
具体实施方式
根据各种实施例揭示适合于使用于多种不同电子装置中的致动器装置。所述致动器装置可经调适以使用于相机中,例如小型相机。所述致动器装置可用于手动或自动聚焦所述小型相机。所述致动器装置可用于使所述小型相机变焦,或为所述小型相机提供光学图像稳定。所述致动器装置可用于对准所述相机内的光学器件。所述致动器装置可用于电子装置或任何其它装置中的任何其它所要的应用。
根据一个或一个以上实施例,所述致动器装置可包含一个或一个以上MEMS致动器。可使用单片构造形成所述致动器装置。可使用非单片构造形成所述致动器装置。
可使用当代制造技术形成所述致动器装置,例如蚀刻及微机械加工。预期各种其它制造技术。
所述致动器装置可由硅形成(例如,单晶硅及/或多晶硅)。所述致动器装置可由其它半导体形成,例如硅、锗、金刚石及砷化镓。形成所述致动器装置的材料可经掺杂以获得其所要导电率。所述致动器装置可由金属形成,例如钨、钛、锗、铝或镍。可使用此类材料的任何所要组合。
根据各种实施例揭示对致动器装置及/或由所述致动器装置移动的项目的运动控制。所述运动控制可用于促进项目的所要移动,同时减轻所述项目的非所要的移动。例如,所述运动控制可用于促进透镜沿着所述透镜的光轴的移动,同时抑制所述透镜的其它移动。因此,所述运动控制可用于促进所述透镜以单一所要平移自由度移动,同时抑制所述透镜在所有其它平移自由度上的移动,且同时抑制所述透镜在所有旋转自由度上的移动。在另一实例中,所述运动控制可促进所述透镜在所有三个平移自由度上的移动,同时抑制所述透镜在所有旋转自由度上的移动。
因此,可提供单独使用及用于电子装置中的增强的小型相机。所述小型相机适合于用于广泛多种不同电子装置中。例如,所述小型相机适合于用于例如蜂窝式电话、膝上型计算机、电视机、手持型装置及监视装置等电子装置中。
根据各种实施例,提供更小大小及增强的抗冲击性。增强的制造技术可用于提供这些优点及其它优点。此类制造技术可额外地增强小型相机的整体质量及可靠性,同时也实质上减小其成本。
图1说明根据实施例的具有致动器装置400的电子装置100。如本文中所论述,致动器装置400可具有一个或一个以上致动器550。在一个实施例中,致动器550可为MEMS致动器,例如静电梳状驱动致动器。在一个实施例中,致动器550可为旋转梳状驱动致动器。
电子装置100可具有一个或一个以上致动器550,以移动其任何所要的组件。例如,电子装置100可具有例如小型相机101等光学装置,小型相机101具有用于移动光学元件(例如一个或一个以上可移动透镜301)(展示于图2中)的致动器550,所述光学元件经调适以提供聚焦、变焦及/或图像稳定。电子装置100可具有任何所要数目的致动器550,以执行任何所要的功能。
电子装置100可为蜂窝式电话、膝上型计算机、监视装置或任何其它所要的装置。小型相机101可建置在电子装置100中、可附接到电子装置100或可相对于电子装置100分离(例如,远程)。
图2说明根据一实施例的具有一透镜镜筒200的小型相机101。透镜镜筒200可含有一个或一个以上光学元件,例如可移动透镜301,所述一个或一个以上光学元件可由致动器装置400(展示于图1中)移动。透镜镜筒200可具有可为固定的一个或一个以上光学元件。例如,透镜镜筒200可含有一个或一个以上透镜、孔口(可变的或固定的)、快门、镜(其可为平坦的、非平坦的、被供电的或未被供电的)、棱镜、空间光调制器、衍射光栅、激光器、LED及/或检测器。这些项目中的任一者可为固定的或可由致动器装置400移动。
致动器装置400可移动非光学装置,例如为了扫描而提供的样本。所述样本可为生物样本或非生物样本。生物样本的实例包含生物体、组织、细胞及蛋白质。非生物样本的实例包含固体、液体及气体。致动器装置400可用于操纵结构、光、声或任何其它所要事物。
所述光学元件可部分或完全包含于透镜镜筒200内。透镜镜筒200可具有任何所要的形状,例如,透镜镜筒200可实质上为圆形、三角形、矩形、正方形、五边形、六边形、八边形或任何其它形状或横截面配置。透镜镜筒200可永久或可移除地附接到小型相机101。可由小型相机101的外壳的部分界定透镜镜筒200。透镜镜筒200可部分或完全安置于小型相机101内。
图3A说明根据一实施例的安置于透镜镜筒200内的致动器模块300。致动器模块300可含有致动器装置400。致动器装置400可完全包含于透镜镜筒200内、部分包含于透镜镜筒200内或完全在透镜镜筒200外部。致动器装置400可经调适以移动包含于透镜镜筒200内的光学元件、不包含于透镜镜筒200内的光学元件及/或任何其它所要的项目。
图3B以分解图说明根据一实施例的透镜镜筒200及致动器模块300。可移动透镜301为光学元件的实例,其可附接到致动器装置400且可借此移动。致动器装置400可安置于上部模块盖401与下部模块盖402的中间。
可提供额外光学元件,例如固定(例如,静止)透镜302。所述额外光学元件可例如促进聚焦、变焦及/或光学图像稳定。可提供任何所要数目及/或类型的可移动(例如,经由致动器装置400)及固定的光学元件。
图4说明根据一实施例的致动器模块300。致动器模块300可部分或完全安置于小型相机101内。致动器装置400可部分或完全安置于致动器模块300内。例如,致动器装置400可实质上夹在上部模块盖401与下部模块盖402之间。
致动器模块300可具有任何所要形状。例如,致动器模块300可实质上为圆形、三角形、正方形、矩形、五边形、六边形、八边形或任何其它形状或横截面配置。
在一个实施例中,透镜镜筒200可实质上为圆形横截面配置,且致动器模块300可实质上为圆形横截面配置。实质上圆形的透镜镜筒200及实质上圆形的致动器模块300的使用可促进大小上的有利缩减。可例如促进所述大小上的缩减,这是因为圆形透镜通常是优选的。实质上圆形的透镜镜筒200及具有圆形透镜的实质上圆形的致动器模块300的使用趋向于导致缩减浪费的体积,且因此趋向于促进大小上的缩减。
如本文中所论述,一个或一个以上光学元件(例如可移动透镜301)可安置于形成于致动器模块300中的开口405中(例如,孔)。举例来说,致动器550的致动可实现所述光学元件沿着其光轴410的移动。因此,致动器550的致动可移动一个或一个以上透镜,以实现例如聚焦或变焦。
致动器模块300可具有形成于其内的切口403,以促进致动器模块300的组装及其内含有的致动器装置400的对准。切口403及/或部分安置于切口403内的电接触件404可用于促进致动器模块300相对于透镜镜筒200的对准。
图5A说明根据一实施例的致动器装置400的俯视图,致动器装置400具有电接触件404、开口405、内部铰链挠曲501、运动学安装挠曲502、可移动框架505、外部框架506、蜿蜒接触挠曲508、部署扭转挠曲509、部署停止件510、皮片阻尼器511、球承窝缓冲器513、悬臂挠曲514、运动控制扭转挠曲515、外部铰链挠曲516、固定框架517、平台520、透镜衬垫521、枢转轴525、致动器550、空间551及块552。
块552(图5A)经展示以表示一些图中的致动器550的齿560(见图5B及7)。所属领域的技术人员将了解,梳状驱动器通常包含许多的非常小的齿560,其在此比例的图上较以图形展示。例如,致动器550在其每一侧上可具有介于1个与10,000个之间的齿,且在其的每一侧上可具有约2,000个齿。因此,在一个实施例中,块552可不表示齿560的实际配置,然而代替齿560而展示,以更好地说明如本文中所论述的致动器550的操作。
根据一实施例,致动器装置400可实质上为六边形的。所述六边形容易促进致动器装置400在实质上圆形的透镜镜筒200内的放置。所述六边形也促进有效使用晶片的基板面。预期其它形状。
致动器装置400可具有多个致动器550。图5A中仅详细地说明一个致动器550。针对未详细说明的两个额外致动器550而在图5A中展示空间551。因此,在一个实施例中,致动器装置400可具有绕开口405以一实质上径向对称的图案安置的三个致动器550,使得致动器550彼此间隔开约120°。致动器装置400可具有以任何所要图案安置的任何所要数目的致动器550。作为进一步实例,致动器装置400可具有彼此间隔开约180°的两个致动器550,或可具有彼此间隔开约90°的四个致动器550。
如本文中所论述,致动器550可包含一个或一个以上MEMS致动器、音圈致动器,或任何其它所要类型或类型的组合的致动器。例如,在一个实施例中,每一致动器550可为垂直旋转梳状驱动器。
致动器550可彼此协作,以沿着光轴410(图3B)移动平台520,光轴在图5A中垂直于致动器装置400的平面。致动器550可彼此协作而以维持平台520相对于光轴410实质上垂直的方式及以实质上减轻平台520旋转的方式移动平台520。
通过在邻近的齿560之间(由块552表示)施加电压差而完成对致动器550的致动。此致动实现致动器550的旋转,以促进本文中描述的平台520的移动。
在各种实施例中,平台520可经调适而实质上为一环(例如,如图5A中所展示)。预期其它形状。平台520可具有任何所要的形状。
在部署之前,致动器装置400可为实质上平面结构。例如,致动器装置400可实质上由单一、单件材料形成,例如硅。可由单一裸片形成致动器装置400。裸片可例如约横跨4毫米到5毫米,且例如约150微米厚。
致动器装置400可由MEMS技术形成,例如铣削或蚀刻。多个致动器装置400可形成于单一晶片上。致动器装置400的整体形状或占用面积可经调适以增强单一晶片上多个致动器装置400的形成。
在操作之前,根据一实施例,每一致动器550的固定框架517可经部署以相对于彼此而偏移由块552表示的邻近齿560对。部署可导致致动器装置400的实质上非平面整体配置。当部署时,每一致动器550可具有其从外部框架506的平面延伸的一部分(例如,固定框架517)。固定框架517可从外部框架506的平面以相对于其的角度延伸。因此,当部署时,固定框架517可相对于外部框架506而实质上在平面外。
一旦部署,固定框架517可经固定或锁定到一定位置,使得(当未致动致动器550时)固定框架517并不相对于外部框架506进一步移动,及相对于外部框架506及相对于可移动框架505有角度地偏移或旋转。固定框架517可机械地固定到适当位置,粘合地结合到适当位置,或机械固定及粘合地结合的任何所要组合。
对致动器550的致动可致使可移动框架505朝向部署的固定框架517旋转,以实现平台520的所要移动。运动控制扭转挠曲515及外部铰链挠曲516协作以促进如本文中所论述的可移动框架505的运动控制的旋转。可移动框架505绕枢转轴525旋转。
图5B说明根据一实施例的致动器装置400的俯视图,其具有展示于致动器550中的齿560来代替代表其的块552。为清晰起见,在图5B中所展示的齿560可考虑在数目上减小,且在大小上夸大。
图6A说明根据一实施例的致动器550中的一者的俯视图,其具有内部铰链挠曲501、球承窝缓冲器513、可移动框架505、外部铰链挠曲516、运动控制扭转挠曲515、悬臂挠曲514、固定框架517、枢转轴525、蜿蜒接触挠曲508、伪运动学安装及电接触件404,及平台520。图6A进一步说明一横向缓冲器组合件1001,其在本文中进一步描述。
内部铰链挠曲501与悬臂挠曲514协作,以传递自可移动框架505到平台520的所要运动。因此,致动器550的致动导致可移动框架505的旋转,这继而导致如本文中所论述的平台520的平移。
可移动框架505可以类似于门在其铰链上转动的方式在外部铰链挠曲516上转动。在将剪切力施加到致动器装置400后,致动器550的两个外部铰链挠曲516中的一者可即刻处于拉伸中,而外部铰链挠曲516可处于压缩中。两个运动控制扭转挠曲515在此类情况中趋向于减轻外部铰链挠曲516的非所要的屈曲。
每一致动器可实质上安置于提供相对较高横向刚性及相对较软旋转刚性的运动控制机构中。在一个实施例中,所述运动控制机构可具有一个或一个以上(例如,两个)外部铰链挠曲516,且可具有一个或一个以上(例如,两个)运动控制扭转挠曲515。因此,可移动框架505的移动可实质上由其所要的旋转而约束。
在一个实施例中,用于致动器550的所述运动控制机构可包含外部框架506、可移动框架505、运动控制扭转挠曲515、外部铰链挠曲516、内部铰链挠曲501、所述悬臂挠曲514及平台520。在一个实施例中,所述运动控制机构可包含趋向于将平台520的移动限制于所要的平移移动的所有结构。
根据一实施例,每一致动器550可实质上包含于所述运动控制机构中,以实质上限制致动器装置400上的基板面的竞争。因为每一致动器550及其相关联的运动控制机构实质上占据致动器装置400的相同表面积,所以其并不竞争基板面。因此,随着致动器550在大小上增加,其相关联的运动控制机构也可在大小上增加。在某些实施例中,期望增加一致动器550的大小,以借此增加由其提供的力。在某些实施例中,也期望增加所述运动控制机构的大小,以维持其合意地限制平台520的移动的能力。可移动框架550可被视为所述运动控制机构的一部分。
图6B说明根据一实施例的致动器550,为清晰起见,用阴影展示固定框架517。阴影固定框架517可部署到致动器装置400的平面外的位置,且可固定于此部署的位置中。
可移动框架505可支撑致动器550的移动部分,例如一些齿560(见图7)。固定框架517可支撑致动器550的固定部分,例如其它齿560(见图7)。对致动器550施加电压可致使可移动框架505绕外部铰链挠曲516旋转朝向固定框架517。所述电压的移除或缩减可准许由内部铰链挠曲514、外部铰链挠曲516及运动控制扭转挠曲515施加的弹簧力将可移动框架505旋转远离固定框架517。可移动框架505与固定框架517之间可提供足够间隙以适应此所要的移动。
图6C说明根据一实施例的具有径向变化571的平台520的一部分。在一个实施例中,径向变化571可形成于平台520中,以准许平台520扩展。径向变化571可在平台520中有角度地弯曲。因此,光学元件(例如可移动透镜301)可插入于平台520的开口405中,开口405可经扩展以容纳可移动透镜301,且开口405可夹住可移动透镜301。开口405可随着平台520的径向变化571变形而扩展(例如,趋向于伸直),以便增加开口405的圆周。
图6D说明可移动透镜的透视图,其经定位以安装到致动器装置400,且图6E说明根据一实施例的附接到致动器装置400的可移动透镜301的一侧视图。在一个实施例中,可移动透镜301可粘合地结合到平台550,例如通过将可移动透镜301的支架522粘合地结合到透镜衬垫521。例如,环氧树脂523可用于将可移动透镜301粘合地结合到平台520。可移动透镜301可由透镜衬垫521支撑。
图7说明根据一实施例的致动器550的一部分,其展示在致动器550的齿560上叠加的块552。如本文中所论述,块552代表齿560。
图8说明根据一实施例的处于部署配置的致动器装置400的仰视透视图。在所述部署配置中,未致动的可移动框架505相对于外部框架506而实质上在平面内,且经部署固定框架517相对于外部框架506及可移动框架505而实质上在平面外。
可经由电接触件404而将电压施加到每一致动器550。例如,三个接触件404的两者可用于将电压从透镜镜筒200施加到致动器装置400。可不使用或可使用第三接触件404以冗余地从透镜镜筒200将一个极性的电压施加到致动器装置400。
可将实质上相同的电压施加到三个致动器550,以导致其移动框架505的实质上相同的移动。将实质上相同的电压施加到三个致动器550可导致平台520相对于外部框架506的平移,使得平台520保持实质上平行于外部框架506。因此,随着一光学元件(例如可移动透镜301)(例如)沿着其光轴410(图3B)移动,所述光学元件可维持所要对准。
可将实质上不同的电压施加到三个致动器550,以导致其移动框架505的实质上不同的移动。通过使用三个接触件404及一共同回线(commonreturn),可将实质上不同的电压可施加到三个致动器550。因此,每一接触件404可将单独控制的电压施加到三个致动器550的专用者。
将实质上不同的电压施加到三个致动器550可导致平台520相对于外部框架506的平移,使得平台实质上相对于外部框架506倾斜。因此,当施加实质上不同的电压时,平台520并不一定保持实质上平行于所述外部框架。将不同电压施加到三个致动器550可用于例如将平台520与外部框架506对准。将不同电压施加到三个致动器550可用于促进例如光学图像稳定或透镜对准。
图9A说明根据一实施例的未被施加任何电压的处于部署配置的致动器装置400的一部分。在没有任何电压施加到致动器装置400的情况下,可移动框架505相对于外部框架506而实质上在平面内,且经部署固定框架517相对于外部框架506及可移动框架505而实质上在平面外。
图9B说明根据一实施例的被施加较小电压的处于部署配置的致动器装置400的一部分。在施加较小电压的情况下,可移动框架505已朝向经部署固定框架517旋转,且处于一部分致动的位置中。
图9C说明根据一实施例的被施加最大电压的处于部署配置的致动器装置400的一部分。如可见,可移动框架505已进一步朝向经部署固定框架517旋转,且处于完全致动的位置中。
图10说明根据一实施例的横向缓冲器组合件1001的俯视图。横向缓冲器组合件1001可具有第一缓冲器部件1002及第二缓冲器部件1003。第一缓冲器部件1002可形成于固定框架517上,且第二缓冲器部件可形成于可移动框架505上。第一缓冲器部件1002及第二缓冲器部件1003可经协作以在冲击或较大加速度期间抑制可移动框架505相对于固定框架517(且因而也相对于外部框架506)的非所要的横向运动。第一缓冲器部件1002与第二缓冲器部件1003之间的空隙“D”可为约2微米至3微米宽,以限制此非所要的横向运动。
图11说明根据一实施例的运动控制扭转挠曲515及外部铰链挠曲516的透视图。运动控制扭转挠曲515及外部铰链挠曲516可比致动器装置400的其它部分更薄,以提供运动控制扭转挠曲515及外部铰链挠曲516的所要刚性。例如,在一个实施例中,外部铰链挠曲516、内部铰链挠曲501及运动控制扭转挠曲515可具有约100微米的宽度及约2微米到3微米的厚度。
运动控制扭转挠曲515可位于枢转轴525上。在一个实施例中,枢转轴525为连接两个外部铰链挠曲516的中心的线。在一个实施例中,枢转轴525为可移动框架506绕其旋转的绞合线或轴。
图12说明根据一实施例的内部铰链挠曲501的透视图。内部铰链挠曲501可比致动器装置400的其它部分更薄,以提供内部铰链挠曲501的所要刚性。例如,在一个实施例中,内部铰链挠曲501可为约500微米长,60微米宽,及2微米到3微米厚。
图13说明根据一实施例的悬臂挠曲514的透视图,其具有内部铰链挠曲501、第一变薄区段1301、较厚区段1302及第二变薄区段1303。悬臂挠曲514可用于将可移动框架505的移动传递到平台520。悬臂挠曲514可用于促进将可移动框架505的旋转转换为平台520的平移。
内部铰链挠曲501可在平台520平移时弯曲以准许可移动框架505旋转。随着可移动框架505将移动传递到平台520,第一变薄区段1301及第二变薄区段1303可弯曲以允许可移动框架505与平台520之间的距离上的变化。
悬臂挠曲514可在靠近其末端处更薄,且可在靠近其中心处更厚。此配置可决定悬臂挠曲514的所要比率的刚性。例如,可需要具有相比较低的刚性以在可移动框架505将移动传递到平台520时径向地补偿可移动框架505与平台520之间的距离上的变化。
图14说明根据一实施例的蜿蜒接触挠曲508及部署扭转挠曲509的透视图。蜿蜒接触挠曲508可促进电接触件404与所述部署固定框架之间的电接触。所述部署扭转挠曲509可在部署期间促进部署固定框架517相对于外部框架506的旋转。
图15说明根据一实施例的一部署停止件510的透视俯视图,所述图展示当部署时,部署停止件510并不接触顶部侧上的外部框架506。环氧树脂1501可施加于部署停止件510及外部框架506的顶表面上,以相对于外部框架506将部署停止件510固定到适当位置中。因此,环氧树脂1501可相对于外部框架506而将部署固定框架517固定到适当位置中。经部署固定框架517的各个部分可用作部署停止件517。例如,当部署经部署固定框架时,经部署固定框架517的邻接外部框架506的其它部分可用作部署停止件510。
图16说明根据一实施例的部署停止件510的透视仰视图,所述图展示当部署时,部署停止件510接触底部侧上的外部框架506。环氧树脂1501可施加到部署停止件510及外部框架506的底表面,以将部署停止件510相对于外部框架506固定到适当位置中。在需要时,环氧树脂1501可施加到部署停止件510及外部框架506的顶表面及底表面两者。
图17A说明根据一实施例的皮片阻尼器511的透视图。皮片阻尼器511位于在致动器550的既定操作(例如,致动)期间的所要的相对运动相对低的地方及在冲击期间潜在的非所要的相对运动相对高的地方。例如,皮片阻尼器511可形成于枢转轴525上。
阻尼材料1701可跨外部框架506与可移动框架505之间形成的空隙1702而延伸。阻尼材料1701可具有较高阻尼系数。例如,在一个实施例中,阻尼材料1701可具有介于0.7与0.9之间的一阻尼系数。例如,阻尼材料1701可具有约0.8的阻尼系数。在一个实施例中,阻尼材料1701可为环氧树脂。
阻尼材料1701可容易地准许可移动框架505相对于外部框架506的所要运动。阻尼材料1701可抑制归因于冲击而造成的可移动框架505相对于外部框架506的非所要的运动。因此,在对致动器550的致动期间,阻尼材料1701可准许可移动框架505相对于外部框架506的旋转,且在冲击期间,阻尼材料1701可抑制可移动框架505相对于外部框架506的横向运动及/或平面外的运动。
皮片阻尼器511可具有从可移动框架505延伸的皮片1706,且可具有从外部框架506延伸的皮片1707。可于皮片1706与皮片1707之间形成空隙1702。
延伸部分1708可从皮片1706延伸,且/或延伸部分1709可从皮片1707延伸。延伸部分1708及延伸部分1709可延伸空隙1702的长度,使得可使用比没有延伸部分1708及/或延伸部分1709时可能使用的阻尼的材料更多的阻尼材料1701。
沟槽1719可形成于皮片1706及/或1707中,且不同于皮片1706及1707的材料的沟槽材料1720可沉积于沟槽1719中。例如,皮片1706及1707可由单晶硅形成,且沟槽材料1720可由多晶硅形成。对于皮片1706及1707及对于沟槽材料1720可使用任何所要的材料组合,以便实现皮片1706及1707的所要刚性。
图17B说明在没有施加到其的冲击的情况下安置于上部模块盖401与下部模块盖402之间的可移动框架505。在缺乏冲击时,可移动框架505保持于其未致动的位置中,且外部铰链挠曲516不弯曲。
图17C说明在可移动框架505已经由冲击而移动到抵靠下部模块盖402的位置后的可移动框架505,所述冲击例如可起因于电子装置100掉落。可由下部模块外壳402限制或减冲可移动框架505的移动,且借此可限制外部铰链挠曲516非所要的双重弯曲。以类似方式,上部模块外壳401可限制可移动框架505的移动,及外部铰链挠曲516的双重弯曲。因此,可减轻外部铰链挠曲516内非所要的压力。
图17D到图17H说明外部铰链挠曲1752的替代实施例。如这些图中所说明,在一些实施例中,外部铰链挠曲1752可为X形的,以增加对可移动框架505在横向方向上的运动控制。外部铰链挠曲516、1752可大体上趋向于弯曲,例如绕其中央部分弯曲,以促进可移动框架505相对于外部框架506的移动。预期其它形状。例如,外部铰链挠曲1752可成形为H、I、M、N、V、W、Y形,或可具有任何其它所要形状。每一外部铰链挠曲1752可包含与外部框架506及可移动框架505互连的任何所要数目的结构。结构可互连或可不互连。结构可相对于彼此而实质上为相同的,或可相对于彼此而实质上为不同的。每一外部铰链挠曲1752可相对于每一其它铰链挠曲1752为实质上相同的,或可相对于其它铰链挠曲1752为实质上不同的。
可通过如本文中所论述的蚀刻而形成外部铰链挠曲516、1752及任何其它结构。所述外部铰链挠曲及任何其它结构可包含单晶硅、多晶硅或其任何组合。
图17D到图17F及17I到17N展示横向缓冲器组合件1754的替代实施例,上文结合图10论述缓冲器组合件1754的另一实施例。图17D到F及17I到17N的横向缓冲器组合件1754相对于图10的横向缓冲器组合件1001大体上具有更多圆形曲线。
图17D到17F及17I到17N说明对于约束组件(例如,可移动组件505)在±Z方向上的垂直移动以及其横向移动(即,在±X及/或±Y方向上)两者有用的联锁缓冲器皮片特征1756的实例实施例。如图17K、17L及17N的横截面图中可见,联锁皮片特征1756的结构及其形成方法类似于下文结合图49到图53详细论述的联锁皮片特征5000的结构及其形成方法。
如图17F中所说明,联锁皮片特征1756包含形成一对皮片1756A及1756B,所述对皮片1756A及1756B分别从可移动组件505及固定组件506延伸且在形成于另一相对组件上的对应肩部1762上延伸。可移动组件505上的皮片1756A限制可移动组件505在-Z方向上的运动,且固定组件506上的皮片1756B限制可移动组件505在+Z方向上的运动。另外,如图17K、17L及17N中所说明,两个组件505及506之间的空隙1760(其可如下文结合图49A到图49F所论述般形成)可限制可移动组件505在±X及/或±Y方向上的运动。
如图17M中所说明,皮片1756A及1756B的相应前末端可界定其相对末端处的隅角,且所述隅角中的一者或一者以上可并入有椭圆嵌条1766。
如图17D到17L及17K到17N中所说明,可提供单一缓冲器皮片1758,以用于约束致动器装置1750中的组件(例如,可移动组件505)的横向移动。例如,缓冲器皮片1758(其在一些实施例中可包含多晶硅)可从固定组件(例如,组件506)且朝向可移动组件505延伸但不在其上延伸,以限制可移动组件505在横向(即,在±X及/或±Y方向上)的运动。如图17K、17L及17N中所说明,可使固定组件506与可移动组件505之间的空隙1764比缓冲器皮片1758与可移动组件505之间的空隙1768相对更大,使得缓冲器皮片1758并不干涉可移动组件505的正常旋转运动,但确实发挥作用以防止其非所要的横向运动。
图18说明根据一实施例的球承窝缓冲器513。球承窝缓冲器513可具有实质上圆柱球518,球518可滑动地安置于实质上互补的圆柱形承窝519。窝缓冲器513准许平台520相对于外部框架506的所要移动,且限制其它移动。
图19说明根据一实施例的球承窝513及两个框架铰链526的透视图。框架铰链526可为在另外实质上刚硬的外部框架506中的铰链挠曲。框架铰链526准许外部框架506在平面外变形,同时维持平面内所要的刚度。
图20为根据一实施例的致动器装置400的俯视平面图,其中沿着线21-21取得横截面图21-21。图21A为如沿着线21-21见到的图20的致动器装置400的部分横截面图,其展示处于未部署状态中的致动器装置400,且图21B为如沿着线21-21见到的图20的致动器装置400的部分横截面图,其展示处于部署状态中的致动器装置400。
如图20到21B中见到,且如上文更详细论述,当初始形成时致动器装置400可为实质上平面,且可包括凹口504、电接触件或凸片404(其具有对准孔口310)、外框架506、固定框架517(其耦合到外框架506以用于相对于外框架506的旋转移动)、可移动框架505(其耦合到外框架506以用于相对于外框架506的旋转移动)及致动器,其在一个实施例中可包含并入有多个相互交叉齿560的静电、旋转作用的致动器550,所述致动器的固定部分附接到固定框架517且所述致动器的移动部分附接到可移动框架505。
在一个实施例中,致动器装置400可包含导电材料(例如,半导体(例如,多晶硅或单晶硅)),且可使用光刻技术(例如蚀刻或微机械加工)来形成。所述蚀刻可包括深反应性离子蚀刻(DRIE)。所述微机械加工可包含离子铣削、激光烧蚀、化学机械抛光(CMP)、微电子放电成形及/或微锻造中的一者或一者以上。
参考图21A,可见,与致动器装置400的其它组件一样,致动器550的相互交叉齿560初始地彼此共面安置。因此,将电压差施加到齿560无法导致可移动框架505相对于固定框架517的任何平面外旋转移动,且因此无法导致平台520在Z方向上的任何对应移动。因此,为实现后一种类型的移动,可首先将致动器装置400部署成实现此类型的致动的配置。
如图21B中所说明,在一个实施例中,可通过相对于外框架506(即,围绕旋转轴2102且在由箭头2104指示的方向上)旋转固定框架517,使得致动器齿560的固定部分相对于致动器齿560的移动部分以所选择的角度安置,且接着相对于外框架506以所述所选择的角度固定固定框架517的角位置来实现此部署。当如此部署时,将电压差施加到致动器550的相互交叉的齿560将导致可移动框架505朝固定框架517的旋转移动,且因此导致平台520在Z方向上的移动。
可以多种方式实现固定框架517相对于外框架506到部署位置的旋转及其角位置相对于外框架506的固定。如上文结合图14到16所论述,在一个实施例中,可提供部署停止件510来用以下方式限制固定框架517的平面外旋转移动且将其固定在部署位置处(即,在所选择的角度处)。
图22A及22B为沿着通过图15中的部署停止件510的线22-22取得的部分横截面图,其分别说明安置在未部署状态及安置在部署状态中的部署停止件510。如图22A中所说明,部署停止件510附接到固定框架517且具有与外框架506的侧壁2210平行且间隔相对而安置的侧壁2208。在部署期间,固定框架517相对于外框架506通过所选择的角度θ旋转直到部署停止件510的相对侧壁2208的下端2202与外框架506的相对侧壁2210邻接安置。
可以许多方式实现固定框架517相对于外框架506的旋转,所述方式包括(例如)通过按压固定框架517的上表面或通过用力拉固定框架517的下表面(例如,使用真空),直到致动器齿560的固定部分相对于致动器齿560的移动部分以所选择的角度θ安置为止。
此外或替代地,如图22B中所说明,可使用一个或一个以上模具或定位器2204及/或2206来实现或辅助固定框架517相对于外框架506的旋转。例如,在一个实施例中,当固定框架517已被旋转到部署位置时(即,使得致动器齿560的固定部分相对于致动器齿的移动部分以所选择的角度θ安置),定位器2206具有带有对应于外框架506的下表面2214的上表面2212的外缘2211及带有对应于固定框架517的下表面2218的上表面2216的中央凹口2215。将致动器装置400放置在定位器2206上且接着如上文向下按压或拉动固定框架517直到固定框架517的下表面2218接触定位器2206的中央凹口2215的上表面2216为止。
在另一实施例中,当固定框架517已旋转到相对于外框架506的部署位置时(即,使得致动器齿506的固定部分相对于致动器齿的移动部分以所选择的角度θ安置),可使用两个定位器,例如,上文的第一定位器2206及第二定位器2204,所述第二定位器具有带有对应于外框架506的上表面2224的下表面2222的外缘2221及具有带有对应于固定框架517的上表面2228的下表面2226的中央凸出部2225。如图22B中所说明,在此实施例中,致动器装置400放置在第一定位器2206与第二定位器2204之间,且接着促使第一定位器2206及第二定位器2204彼此靠近直到致动器齿560的固定部分相对于致动器齿560的移动部分以所选择的角度θ安置为止。
在一些实施例中,定位器2204及2206中的一者、另一者或两者可并入有小开口(未说明),所述小开口(未说明)经合适地定位以通过(例如)下文更详细描述的方法中的一者或一者以上使得固定框架517能够固定在部署位置中。此外,可以外缘2211及2221及中央凹口2215及中央凸出部2225的许多相关联集合来制造模具2204及2206,使得可同时部署许多致动器装置400且接着将其固定在部署位置中。
如所属领域的技术人员将理解,存在将固定框架517旋转到相对于外框架506的所选择的角位置的其它方法,且因此锻造方法应被认为仅为示范性的且不是限制性的。
如图15、16及22B中所说明,固定框架517相对于外框架506的角位置可以若干不同方式固定在部署状态或角位置中(即,以所选择的角度θ固定)。例如,在一个实施例中,部署停止件510的相对侧壁的下端2202可以粘合剂结合到外框架506的相对侧壁。
在另一实施例中,可(例如)使用激光器或电子束焊机以焊件将部署停止件510的相对侧壁2208的下端2202焊接到外框架506的相对侧壁2210。在另一实施例中,可以粘合剂的嵌条1501将部署停止件510的相对侧壁2208结合到外框架506的相对侧壁2210。
在另一实施例中,作为对粘合剂组成的嵌条1501的代替或除粘合剂组成的嵌条1501之外,可使用粘合剂将并入有所选择的角度θ的楔子1502结合在部署停止件510的相对侧壁与外框架506的相对侧壁之间。
如所属领域的技术人员将理解,存在可将固定框架517固定在部署位置中的其它方式,且因此,锻造应被认为仅为示范性的且不是限制性的。
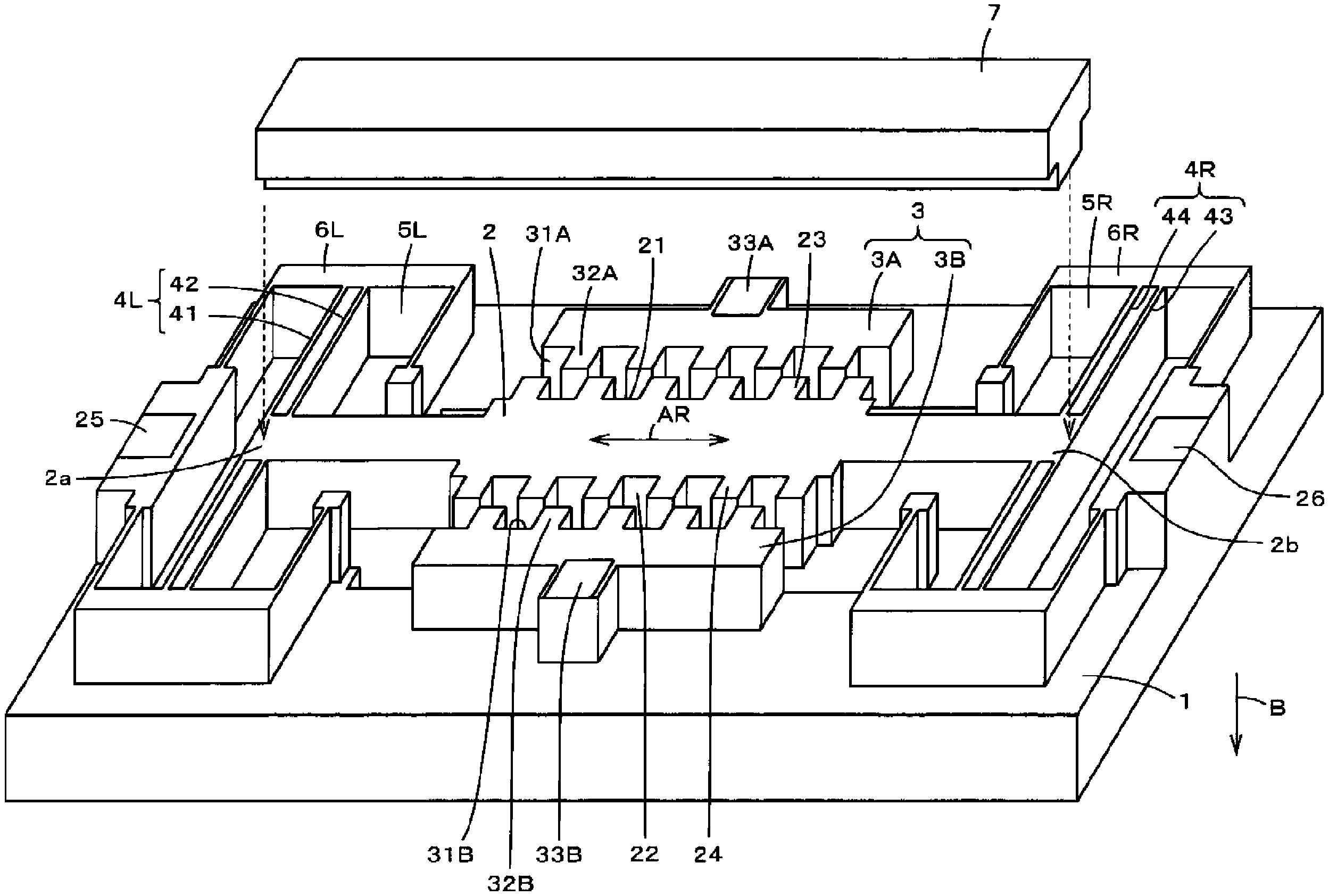
图23为致动器装置2300的另一实施例的俯视平面图,与上文的致动器装置400不同,所述致动器装置2300可操作以在所述装置的平面内移动元件2302(例如,透镜、载物台或类似物),即,在X、Y方向上直线移动且围绕Z方向(θZ)旋转移动。
如图23中可见,实质上平面致动器装置2300包括在上文论述的致动器装置400中发现的许多相同特征,以及其它不同特征(考虑到其致动性质的差异)。致动器装置2300包含外框架506、附接到外框架506的多个固定框架517、与固定框架517平行安置的多个可移动框架505、分别将可移动框架505耦合到固定框架517以用于垂直于固定框架517的相应共面、直线移动的多个运动控制挠曲2036及多个致动器550,所述致动器各自并入有多个相互交叉齿560,所述致动器的固定部分附接到固定框架517且所述致动器的移动部分附接到可移动框架505。
图23中说明的实例致动器装置2300包括三个致动器550,所述三个致动器550关于所述装置的中央轴对称而径向布置,所述三个致动器550各自包括三个梳状驱动器或若干组相互交叉的齿560。然而,应理解,致动器550的数目及布置以及其齿560的数目及布置可与所说明的特定实例致动器装置2300不同。
在图23中可注意到,致动器装置2300的致动器550的相互交叉齿560在与(例如)图5A的致动器装置400的致动器550的齿560延伸的方向垂直的方向上延伸。
此外,如图24的致动器550的放大部分俯视平面图中所说明,应理解,图23的致动器550的相互交叉齿560展示为处于部署位置中(即,彼此散开)以用于相对于彼此的实质上直线移动。然而,如图25A中所说明,可看到致动器550的相互交叉齿560初始经安置以使得相关联的固定框架517及可移动框架505间隔开约齿560的长度。因此,将电压差施加到齿560无法导致可移动框架505相对于固定框架517的任何平面内直线移动,且因此耦合到前者的元件2302的任何对应X、Y或θZ移动。因此,为实现后一种类型的移动,需要将致动器装置2300部署成实现此类型的致动的配置。
如图25B中说明,在一个实施例中,可通过在箭头2500的方向上将相关联的可移动框架505移动到与相关联的固定框架517共面、平行且与其间隔开所选择的距离的部署位置,且接着将可移动框架505固定在所述部署位置中以用于垂直于相关联的固定框架517的实质上共面、直线移动,而实现此部署。如图25C中所说明,当如此部署时,将合适电压差施加到致动器550的相互交叉齿560及从致动器550的相互交叉的齿560移除合适的电压差将导致弹性支撑的可移动框架505朝向及远离固定框架517的实质上直线、垂直移动(如双头箭头2502所指示),且因此导致耦合到可移动框架505的元件2302的对应X、Y及/或θZ移动。
存在用于将可移动框架505且因此将致动器550的齿560的相关联的移动部分移动到部署位置以及用于将其锁定或固定在所述部署位置中的若干不同方法及设备。
在图26中的致动器2300的放大部分俯视平面图中说明一种此方法及设备的实例实施例。在图26的实施例中,所述部署方法包括在外框架506上形成共面过中心闩2602及支点2604。闩2602以弹簧2606耦合到外框架506。共面部署杠杆2608以部署挠曲2310耦合到可移动框架505。部署杠杆2608具有安置在所述杠杆的上端处的表面2612(其配置为用于闩2608的凸轮致动及与闩2608的闩锁啮合的倾斜平面)及所述杠杆的下端处的槽口(其与支点2604啮合以用于所述杠杆围绕支点2604的旋转移动)。
在实例部署中,在箭头2614的方向上将加速脉冲施加到致动器装置2300,同时保持外框架506固定。这致使部署杠杆2608围绕支点2604旋转且朝向外框架506旋转。部署杠杆2608围绕支点2604的旋转致使部署挠曲2310推动可移动框架505从固定框架517直线地且垂直地向上移动且移动到部署位置,其中部署杠杆2608的上端处的凸轮表面2612致动闩2602且由闩2602啮合以将可移动框架505固定在部署位置中,如(例如)图25B中所说明。
图27说明与图26的实施例类似的用于部署及闩锁致动器装置2300的方法及设备的另一实施例。在此实施例中,所述方法进一步包括形成通过邻近部署杠杆2608的上端的弹簧2704附接到部署挠曲2310的拉环2702,且接着直接使用(例如)插入到拉环2702中的小针或另一MEMS装置来使用拉环2702使部署杠杆2608围绕支点2604旋转。
图28为图26及27的实施例的过中心闩2602及部署杠杆2608的放大部分平面图,其展示安置在其原始或预部署位置2801、中间位置2802及最终或闩锁位置2803中的杠杆2608,在中间位置2802中,杠杆2608的上端处的凸轮表面2612已啮合闩2602且迫使其围绕弹簧2606向上旋转,在所述最终或闩锁位置2803中,闩2602已通过弹簧2602返回到其原始位置且啮合在部署杠杆2608的上端,从而将部署杠杆2608,且因此将可移动框架505及相关联的移动致动器齿560闩锁在部署位置中。
在一个实施例中,可将粘合剂施加到闩2602的接合处及部署杠杆2608的上端以防止其由于(例如)冲击或振动而彼此脱离。
图29说明另一致动器装置2300部署方法及设备,其包括在外框架506中形成承窝2902,所述承窝包括其内表面上的多个径向凸出部2904。互补球2906同心地形成在承窝2902内。球2906通过承窝2902的侧壁中的狭槽耦合到运动控制挠曲2306且包括在配置上分别与承窝2902上的径向凸出部2904互补的多个压痕2908。可在致动器装置2300的部署期间使用球2906及承窝2902来减少将可移动框架505(在图29中看不到)移动到部署位置所需的力,且使得可移动框架505实质上直线地且在实质上垂直于固定框架517的方向上移动。
特定来说,在预部署配置中,球2906与承窝2902界定所述两个特征之间的均匀空隙(gap)2910。然而,在移动框架505的部署期间,扭矩(由箭头指示)可被施加到耦合到移动框架505的运动控制挠曲2306且致使运动控制挠曲2306及移动框架505不合意地旋转。然而,如图29中所说明,当球2906开始在承窝2902中旋转时,承窝2902的凸出部2904立即啮合球2906的压痕2908且锁定以防止运动控制挠曲2306及移动框架505的任何进一步运动。因此,将可移动框架505移动到部署位置所需的力得以减小,且在部署期间,可移动框架505实质上直线地且在与固定框架517实质上垂直的方向上移动。
图30说明在致动器装置2300的部署中有用的另一球承窝方法及设备。在图30的实施例中,矩形承窝3002形成在外框架506中,且互补矩形球3004同心地形成在承窝3002内。球3004通过球簧3006连接到外框架506且通过运动控制挠曲2306连接到可移动框架505(在图30中看不到)。如在上文结合图29论述的实施例中,可在将可移动框架505移动到部署位置时使用球3004及承窝3002,使得可移动框架505实质上直线地且在实质上垂直于固定框架517的方向上移动。
特定来说,在移动框架505的部署期间,扭矩(由箭头指示)可被施加到耦合到移动框架505的运动控制挠曲2306且致使运动控制挠曲2306及移动框架505不合意地旋转。然而,如图30中所说明,当矩形球3004开始在矩形承窝3002中旋转时,球3004由承窝3002的顶部及底部边界锁定而不能进一步旋转,从而防止运动控制挠曲2306及移动框架505的任何进一步旋转。因此,可移动框架505实质上直线地且在垂直于固定框架517的方向上移动。
在图31及32中说明用于部署致动器装置2300的方法及设备的另一实施例。在图31中,所述方法包括在外框架506上形成弹性悬臂3102,悬臂3102具有安置在其上的直立柱3104,例如,塑料柱。也形成通过部署挠曲2310耦合到可移动框架505的衬垫3106。衬垫3106具有延伸穿过其的大小上对应于柱3104的圆周外围的开口3108,及安置在柱3104的上表面下方的下表面。
如图32中所说明,可通过(例如)可移动斜面塑料制动件3202将向下力施加到悬臂3102,使得柱3104的上表面被按压在衬垫3106的下表面下方。接着,使用(例如)斜面制动件3202朝向柱3104推动衬垫3106,使得衬垫3106致使部署挠曲2310将可移动框架505推动到部署位置,且衬垫3104中的开口3108在柱3104上居中。接着,(例如)使用斜面制动件3202释放悬臂3102上的向下力,使得柱3104向上滑动到衬垫3106中的开口3108中且将可移动框架505固定在部署位置中。如在上文结合图26到28论述的闩锁实施例中,在一些实施例中可需要使用(例如)粘合剂将柱3104固定在衬垫3106
线性部署的致动器专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0