








专利摘要
本发明提供了一种等离子体马达产生装置。该装置包括圆柱形真空室,在真空室内水平设置有上下两个极板,上极板接地线,下极板连接电源;在真空室的内侧壁上设置有锯齿结构的定子;穿过真空室的轴心设置有转轴,在所述转轴的底部固接有呈锯齿结构的转子;在下极板上放置有若干表面为多孔结构的球形颗粒;接通与下极板相连的电源,通过气体放电可在上下极板之间产生等离子体,球形颗粒从等离子体中吸收能量并做布朗运动,进而推动转子定向旋转。本发明所提供的装置能够从等离子体中吸收能量,通过锯齿的整流作用输出机械能,实现较大空间尺寸的布朗马达,克服了以往生物马达及光马达空间尺度在纳微米量级的局限性。
权利要求
1.一种等离子体马达产生装置,其特征是,包括圆柱形真空室,在所述真空室内水平设置有上下两个极板,上极板接地线,下极板连接电源;在所述真空室的内侧壁上设置有周期性排列的锯齿结构的定子;穿过所述真空室的轴心设置有转轴,在所述转轴的底部固接有呈锯齿结构的转子,所述转子位于所述下极板上方;在所述下极板上放置有若干表面为多孔结构的球形颗粒;接通与所述下极板相连的电源,通过气体放电可在上下极板之间产生等离子体,所述球形颗粒从等离子体中吸收能量并做布朗运动,进而推动转子定向旋转。
2.根据权利要求1所述的等离子体马达产生装置,其特征是,所述转子上的锯齿与所述定子上的锯齿的数量相同。
3.根据权利要求1所述的等离子体马达产生装置,其特征是,所述转子上的锯齿与所述定子上的锯齿均呈倾斜状,且两者的倾斜方向相反。
4.根据权利要求1所述的等离子体马达产生装置,其特征是,所述转子上的锯齿的齿深与齿长比例为1:2,所述定子上的锯齿的齿深与齿长比例为1:2。
5.根据权利要求1所述的等离子体马达产生装置,其特征是,所述球形颗粒的尺寸为微米量级或毫米量级。
6.根据权利要求1所述的等离子体马达产生装置,其特征是,所述上极板为ITO导电玻璃,所述下极板为金属平板。
7.根据权利要求1所述的等离子体马达产生装置,其特征是,所述电源为直流电源或射频电源;接通电源后,所述下极板具有负偏压,偏压范围为150V~400V。
8.根据权利要求1所述的等离子体马达产生装置,其特征是,在所述真空室的腔体上开有进气口和出气口;通过所述进气口可向所述真空室内充入空气或氩气,在所述进气口处安装有流量计,通过调节所述流量计可以控制所述真空室内的气压;在所述出气口处安装有用于测量真空室内气压的真空计。
9.根据权利要求8所述的等离子体马达产生装置,其特征是,所述真空室内的气压在5Pa~200Pa之间。
10.根据权利要求1所述的等离子体马达产生装置,其特征是,所述真空室的半径为50mm~80mm,所述真空室的高度为80mm~150mm。
说明书
技术领域
本发明涉及布朗马达技术领域,具体地说是一种等离子体马达产生装置。
背景技术
马达泛指能够将某种能量转化为机械能的装置,如直流马达、交流马达、生物马达等,其已被广泛应用于工业、医学、生物物理等领域以及日常生活当中。最常见的马达是将电能转换成机械能的电动机。近些年,随着生物显微技术的突飞猛进,人们发现了生物蛋白质分子通过ATP(三磷酸腺苷)水解可以将化学能转换为机械能的分子马达。从物理的角度来讲,如果能将周围环境中无序的噪声能量通过整流得到有用的功,即设计出这样的一种布朗马达,无疑将具有重要的科学意义和实际应用价值。
在纳米尺度上,分子马达属于布朗马达的一种,虽然其可作为一种纳米机器人在治疗疾病方面有着巨大的应用前景,但目前仍处于实验室研究阶段。在微米尺度上,人们已经在实验室中实现了布朗马达。例如,将含有微米大小的枯草杆菌的溶液通过拉伸形成200微米厚的溶液膜,枯草杆菌在溶液薄膜里消耗氧气并做随机布朗运动。再将直径为380微米的锯齿片放入溶液膜中,锯齿片在枯草杆菌的推动下将沿锯齿长边方向定向转动,形成布朗马达[Proceedings of the National Academy of Sciences, 107, 969(2010)]。这种马达能够将枯草杆菌随机运动产生的机械能转化为锯齿定向转动的机械能,从而实现了从环境中吸收利用能量的目的。又如,如果将覆金的微米锯齿(直径约8微米)撒入水膜中并用激光照射,微米锯齿通过热毛细管效应将吸收到的均匀照射的光能转化为锯齿定向转动的机械能,形成微米布朗光马达[Nature Communications, 6, 7855(2015)]。然而,到目前为止,人们在实验室中观察到的布朗马达基本都是纳微米量级,虽然能够实现从环境吸收能量形成定向转动的马达,但与实际应用还有一定距离。人们期望能够在更大的空间尺度上设计出布朗马达。
发明内容
本发明的目的就是提供一种等离子体马达产生装置,该装置能够从等离子体中吸收能量,通过锯齿的整流作用输出机械能,实现较大空间尺寸的布朗马达。
本发明是这样实现的:一种等离子体马达产生装置,包括圆柱形真空室,在所述真空室内水平设置有上下两个极板,上极板接地线,下极板连接电源;在所述真空室的内侧壁上设置有周期性排列的锯齿结构的定子;穿过所述真空室的轴心设置有转轴,在所述转轴的底部固接有呈锯齿结构的转子,所述转子位于所述下极板上方;在所述下极板上放置有若干表面为多孔结构的球形颗粒;接通与所述下极板相连的电源,通过气体放电可在上下极板之间产生等离子体,所述球形颗粒从等离子体中吸收能量并做布朗运动,进而推动转子定向旋转。
所述转子上的锯齿与所述定子上的锯齿的数量相同。
所述转子上的锯齿与所述定子上的锯齿均呈倾斜状,且两者的倾斜方向相反。
所述转子上的锯齿的齿深与齿长比例为1:2,所述定子上的锯齿的齿深与齿长比例为1:2。
所述球形颗粒的尺寸为微米量级或毫米量级。
所述上极板为ITO导电玻璃,所述下极板为金属平板。
所述电源为直流电源或射频电源;接通电源后,所述下极板具有负偏压,偏压范围为150V~400V。
在所述真空室的腔体上开有进气口和出气口;通过所述进气口可向所述真空室内充入空气或氩气,在所述进气口处安装有流量计,通过调节所述流量计可以控制所述真空室内的气压;在所述出气口处安装有用于测量真空室内气压的真空计。
所述真空室内的气压在5Pa~200Pa之间。
所述真空室的半径为50mm~80mm,所述真空室的高度为80mm~150mm。
等离子体由带电粒子(电子与离子)以及电中性粒子组成,整体呈电中性,因其含有高能量粒子而被广泛应用于半导体制造、离子推进器等领域。宇宙中99%的物质由等离子体组成,而尘埃颗粒遍布宇宙。等离子体中的尘埃颗粒通过吸附等离子体中的电子和离子而带电,在一定的条件下呈现出无规则的热运动。本发明的设计思路就是将等离子体中无规则热运动的颗粒所具有的能量提取出,并以可控的机械能的形式加以利用,从而设计出较大空间尺寸的布朗马达。
本发明所提供的等离子体马达产生装置,其结构是:在一圆柱形真空室内水平设置上下两个极板,上极板接地线,下极板接电源;接通电源,通过气体放电可在上下极板之间产生等离子体。在真空室的内壁设有周期性排列的锯齿结构的定子,在真空室的轴心处设有锯齿结构的转子,转子与穿过真空室轴心的转轴相接。表面为多孔结构的球形颗粒放置于下极板上,待接通电源在上下极板之间产生等离子体后,球形颗粒将吸收等离子体中高能粒子能量,并带上大量电荷;球形颗粒在定子与转子之间做随机布朗运动,通过与转子相互作用推动转子定向旋转进而输出有用功。由于等离子体马达的大小取决于真空室的大小,因此采用本发明可以实现较大的马达,克服了以往生物马达及光马达空间尺度在纳微米量级的局限性。
在之前的生物马达实验中,锯齿在细菌的推动下发生转动形成布朗马达并发生能量转换,马达功率为10-15W,本发明中的等离子体马达功率可达到5.3×10-3W,相比生物马达,等离子体马达有效的利用了等离子体内的能量,把离散的能量聚集起来,转化成了可直接利用的机械能,更好的实现了能量转换,能量充分利用。
本发明所提供的等离子体马达产生装置结构简单,操作方便,能够很好的实现能量转换与能量有效利用,这在当今资源短缺的现状下,无疑具有重要的科学意义和实际应用价值。
附图说明
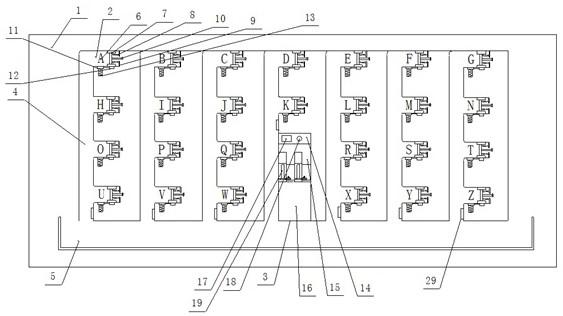
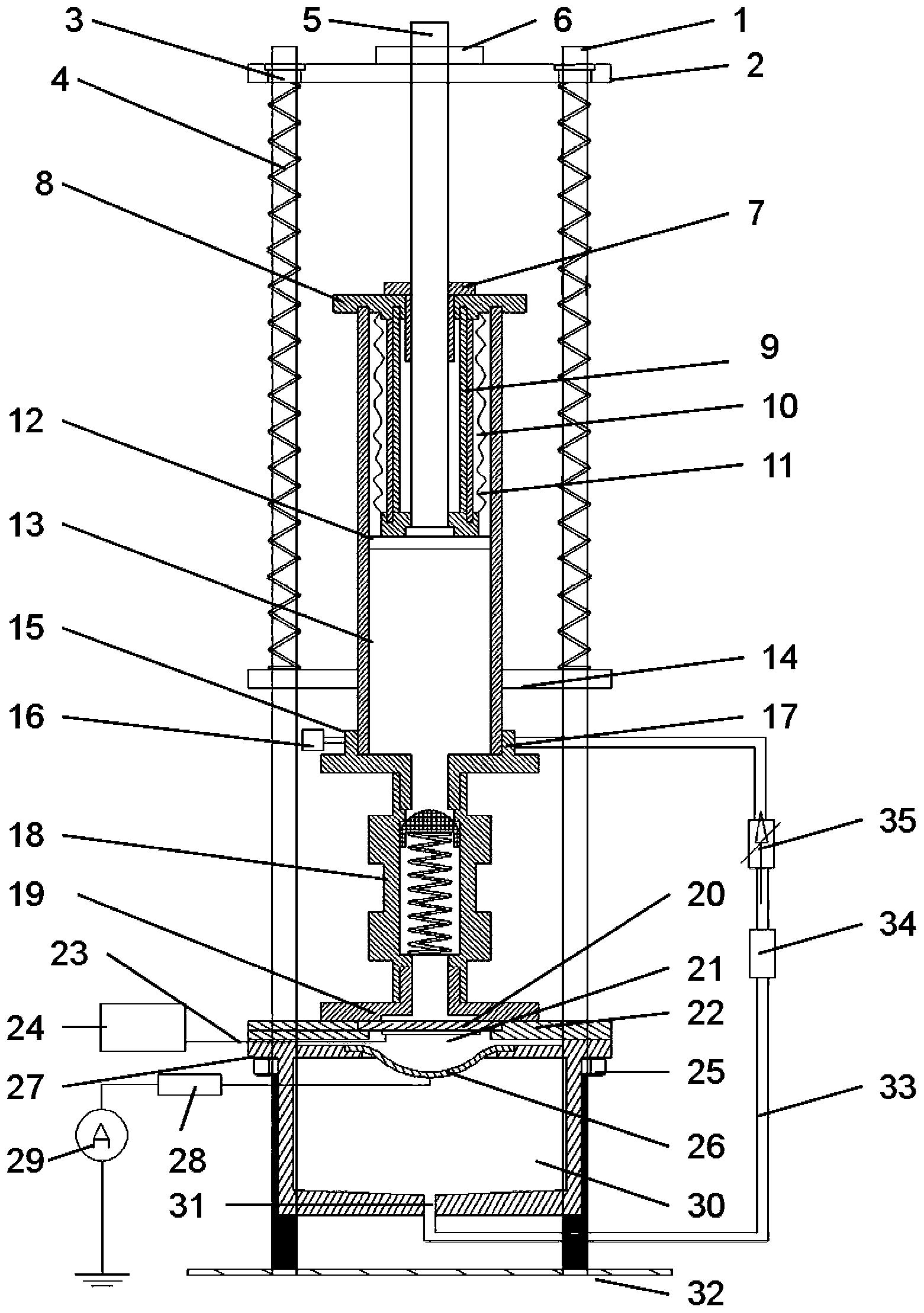
图1是本发明的结构示意图。
图中:1、真空室,2、进气口,3、上极板,4、出气口,5、电源,6、下极板,7、绝缘板,8、转子,9、定子,10、转轴。
具体实施方式
如图1所示,本发明所提供的等离子体马达产生装置包括圆柱形的真空室1,本实施例中真空室1是由不锈钢腔体围成的,且不锈钢腔体接地线。在真空室1内水平设置有相互平行的上下两个极板,两个极板同心共轴,且两个极板均与真空室1的轴心线垂直。上极板3接地线,下极板6连接电源5,电源5位于真空室1外部。本实施例中上极板3为ITO导电玻璃,下极板6为金属平板;上极板3与真空室腔体的上顶端相接触,下极板6通过绝缘板7置于真空室1的底面上,绝缘板7用于实现真空室腔体与下极板6之间的绝缘。与下极板6相连接的电源5可以是直流电源,也可以是射频电源。当电源为直流电源时,下极板6与直流电源的负极相连接,直流电源的正极接地线。当电源为射频电源时,下极板6与射频电源的功率电极相连接,射频电源的另一电极接地线。这样在接通电源后,电源功率耦合到下极板6上,下极板6将具有负偏压。一般控制下极板6的偏压在150V~400V之间。
在真空室腔体的侧壁上开有进气口2和出气口4。通过进气口2可向真空室1内充入空气或氩气;在进气口2处安装有流量计,该流量计可以为质量流量计,通过调节流量计可以控制真空室1内的气压,一般控制真空室1内的气压在5Pa~200Pa之间。在出气口4处安装有用于测量真空室1内气压的真空计。
在真空室1内上下极板之间的内侧壁上设置有周期性排列的锯齿结构的定子9,定子9上的锯齿呈倾斜状,即呈现出不对称的棘齿状结构。在真空室1内的轴心线上设置有呈锯齿结构的转子8,转子8与穿过真空室1轴心的转轴10的底端固接,转轴10的顶端穿出真空室1外。转子8位于下极板6上方,且靠近下极板6。转子8上的锯齿也呈倾斜状,且转子8上锯齿的倾斜方向与定子9上锯齿的倾斜方向相反。
在下极板6上放置有若干表面为多孔结构的、具有吸附性的球形颗粒(例如为球形树脂),这些球形颗粒均匀放置在下极板6上且与定子9和转子8之间的空间相对应,定子9与转子8之间构成锯齿通道。接通与下极板6相连的电源5,使下极板6具有负电位,通过气体放电可在上下极板之间产生均匀的等离子体,球形颗粒作为介质在等离子体中被极化后会携带大量电荷,并从等离子体环境中吸收能量做随机布朗运动。在下极板6上做随机布朗运动的颗粒会在定子9与转子8之间碰撞,球形颗粒通过碰撞的方式将能量传递给转子8,进而推动转子8做持续的定向旋转运动,实现等离子体马达。真空室腔体的上顶端可由石英玻璃制作而成,这样可以方便人们从真空室1上部观察球形颗粒以及转子8的运动。
本发明中球形颗粒在定子与转子之间运动,通过静电库伦碰撞和直接物理碰撞来推动转子转动。转子获得的能量与球形颗粒数以及每个球形颗粒传递的平均能量有关。当球形颗粒数非常少时,显然转子获得的能量也少,功率低。当球形颗粒数非常多时,定子与转子之间的锯齿通道变得非常拥挤,通道内的颗粒之间会频繁的碰撞,真正与转子发生碰撞传递能量的颗粒有限,输出功率较低。因此,只有适当的颗粒数密度才能使转子有最佳输出功率。而最佳颗粒数密度又与定子和转子之间的锯齿通道大小有关。因此,应该根据实际情况来确定球形颗粒的数目。
除了球形颗粒的数量对马达的输出功率有影响外,球形颗粒的表面属性以及尺寸等也会影响其从等离子体环境吸收能量,进而影响马达的效率。球形颗粒一般采用多孔表面结构,大比表面积能够使其尽可能地吸收等离子体高能粒子能量,同时携带更多的电荷,所携带的电荷越多,越有利于球形颗粒发生库伦弹性碰撞,尽量减少非弹性碰撞造成的能量损失,以获得最大等离子体马达效率。球形颗粒的尺寸可以为微米量级或毫米量级,甚至可以为厘米量级。这些都是可以人为控制的。
除了球形颗粒的一些参数可以影响马达效率外,定子和转子的参数、真空室的大小等也会对转子的输出功率产生影响。但是,这些参数的设定还需要和真空室气压、放电功率等相匹配。由于真空室气压和放电功率相对容易调节,因此,通常都是先设定各种参数,再调节气压和放电功率直至马达输出功率最大。
定子和转子上的锯齿的数量可以相同,也可以不同。由于定子和转子上的锯齿都是倾斜状的,因此倾斜后表现为一个长边,一个短边,将倾斜后的长边称为齿长,倾斜后的短边称为齿深,锯齿的齿深、齿长以及两者之间的比例关系都要预先设置。定子与转子之间的距离,即锯齿通道大小也要预先设定。
真空室1的半径以及高度决定了等离子体马达的大小。而不同使用环境中马达的大小不同,因此真空室1的半径、高度也不同。一般情况下,可设置真空室1的半径为50mm~80mm,真空室1的高度为80mm~150mm。
下面以一具体例子介绍本发明中等离子体马达的产生过程。
结合图1,圆柱形的真空室1的半径为65mm,高度为100mm;将球形颗粒均匀放置于真空室1内的下极板6上,球形颗粒直径约为200µm,颗粒数为400粒;定子9与转子8上的锯齿均成周期性排列,锯齿数均为12个,且定子9与转子8上锯齿的倾斜方向相反。设转子8的半径为10mm,齿深为2mm,齿长为4mm;定子9与转子8之间的间距(即定子9上锯齿刃与转子8上锯齿刃之间的距离)约为10mm。向真空室1内充入氩气并抽真空使气压达到30Pa。下极板6连接直流电源的负极,直流电源的正极接地线,设置直流电源的偏压为300V,接通直流电源,使下极板6具有负偏压,通过气体放电在上、下极板之间产生均匀的等离子体。
放电产生后,通过电子流和离子流的作用,球形颗粒在等离子体区域内会携带大量电荷,并从等离子体环境吸收能量做随机布朗运动。球形颗粒在运动的过程中与转子8发生相互作用,通过碰撞的方式将能量传递给转子8,从而使转子8做持续定向运动,实现等离子体马达。可从真空室上窗口来观察颗粒与转子的运动情况。
在宇宙空间环境中,由于其本身具有极高的真空度,因此构造这种等离子体马达不需要真空室,只需要锯齿定子和锯齿转子即可。另外,由于宇宙中广泛存在着等离子体,因此这种等离子体马达也可以不需要上下两个极板以及电源系统,可以具有更为简单的结构。它可以利用颗粒从空间等离子体高能粒子中吸收能量,进而推动转子旋转。将该等离子体马达安装到宇宙飞行器上,无疑可以从空间环境吸收能量并通过转子输出机械功,减少飞行器携带的常规燃料及自重,具有重要的科学意义和实际应用价值。
一种等离子体马达产生装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0