









专利摘要
本发明适用于机械爪技术领域,提供了一种无源机械爪抓取装置及方法,包括:控制模块、驱动模块、测距模块和机械爪;所述测距模块用于获取机械爪的距离参数,并将所述距离参数传输给控制模块;所述控制模块根据所述距离参数向驱动模块发送控制指令,驱动模块根据所述控制指令驱动机械爪在摩擦力作用下对球体进行抓取。所述无源机械爪抓取装置利用球体本身重力和摩擦力的自锁对球体进行抓取,无需锁紧装置,无需动力源,结构简单,节约资源。
权利要求
1.一种无源机械爪抓取装置,其特征在于,包括:控制模块、驱动模块、测距模块和机械爪;
所述机械爪与所述驱动模块连接,用于在所述驱动模块驱动下对球体进行抓取;所述机械爪包括连接轴和爪体,所述爪体的顶端与所述连接轴的一端铰接;
所述测距模块与所述控制模块连接,用于获取所述连接轴与所述球体之间的第一距离和所述爪体的末端与所述球体的支撑面之间的第二距离,并将所述第一距离和所述第二距离传输至所述控制模块;
所述控制模块用于根据所述第一距离、所述第二距离及预设条件向所述驱动模块发送控制指令;
所述驱动模块分别与所述控制模块和所述机械爪连接,用于接收所述控制模块发送的控制指令,并根据所述控制指令驱动所述机械爪动作;
所述无源机械爪抓取装置还包括输入模块;所述输入模块与所述控制模块连接,用于输入球体半径、爪体长度及静摩擦系数;
所述控制模块根据所述输入的球体半径、爪体长度及静摩擦系数计算得到不同的预设条件,其中每种预设条件对应一种类型的球体和爪体。
2.如权利要求1所述的无源机械爪抓取装置,其特征在于,所述测距模块包括第一测距传感器和第二测距传感器;
所述第一测距传感器设置在所述连接轴与所述爪体铰接的一端,用于获取所述连接轴与所述球体之间的第一距离;
所述第二测距传感器设置在所述爪体的末端,用于获取所述爪体的末端与所述球体的支撑面之间的第二距离。
3.如权利要求2所述的无源机械爪抓取装置,其特征在于,所述第一测距传感器和所述第二测距传感器为红外测距传感器或雷达测距传感器。
4.一种无源机械爪抓取方法,其特征在于,包括:
当机械爪位于球体正上方时,驱动所述机械爪的连接轴旋转并下降;
实时获取所述连接轴与所述球体之间的第一距离,当所述第一距离等于或小于第一预设距离时,驱动所述连接轴停止旋转,并停止下降;
当所述连接轴停止旋转,并停止下降后,实时获取所述机械爪的爪体的末端与球体的支撑面之间的第二距离,当所述第二距离在预设时间间隔内的变化量的绝对值小于预设阈值时,驱动所述连接轴上升,所述爪体在摩擦力作用下将所述球体抓取起来;
所述第一预设距离为:
其中,d
所述第二预设距离d
当L>2R时,d
当L<2R时,d
其中,L为机械爪的连接轴到爪体的末端的直线长度,L>2Rcosβ,β为摩擦角,R为球体的半径。
5.如权利要求4所述的无源机械爪抓取方法,其特征在于,所述爪体在摩擦力作用下将所述球体抓取起来后,还包括:
驱动所述机械爪将所述球体运送到指定位置;
驱动所述连接轴旋转并带动所述爪体在离心力作用下张开,所述球体掉落在指定位置。
6.如权利要求4所述的无源机械爪抓取方法,其特征在于,所述第三预设距离为在所述爪体利用摩擦力可将球体抓取起来的条件下,所述连接轴与所述球体之间的最大距离;
所述第三预设距离为:
其中,μ为静摩擦系数,L为机械爪的连接轴到爪体的末端的直线长度,R为球体的半径。
7.如权利要求4至6中任一项所述的无源机械爪抓取方法,其特征在于,所述实时获取所述连接轴与所述球体之间的第一距离和实时获取所述机械爪的爪体的末端与球体的支撑面之间的第二距离,包括:
通过第一测距传感器实时获取所述第一距离;
通过第二测距传感器实时获取所述第二距离。
说明书
技术领域
本发明属于机械爪技术领域,尤其涉及一种无源机械爪抓取装置及方法。
背景技术
随着人们生活水平的提高,网球、高尔夫球等运动逐渐收到人们的喜爱。而不断的捡球称为一件麻烦的事情。
目前,人们设计出采用机械爪对球体进行抓取,现有的机械爪大部分为定位加锁紧的方式,无论自动或手动机械爪,均需要锁紧装置,结构复杂。同时,自动化机械爪锁紧的动力源有气动和电驱动两种,气动锁紧方式需设置气路控制结构,利用压缩空气源实现;电驱动锁紧方式需设置电路控制结构,体积较大、结构复杂、成本高;而手动机械爪则需要人手动对机械爪锁紧,效率低、不易操作。
发明内容
有鉴于此,本发明实施例提供了一种无源机械爪抓取装置及方法,依靠摩擦力的自锁来锁紧球体,以解决现有技术中自动机械爪体积大、结构复杂、成本高、浪费资源和手动机械爪效率低、不易操作的问题。
本发明实施例的第一方面提供了一种无源机械爪抓取装置,包括:控制模块、驱动模块、测距模块和机械爪。
所述机械爪与所述驱动模块连接,用于在所述驱动模块驱动下对球体进行抓取;所述机械爪包括连接轴和爪体,所述爪体的顶端与所述连接轴的一端铰接;
所述测距模块与所述控制模块连接,用于获取所述连接轴与所述球体之间的第一距离和所述爪体的末端与所述球体的支撑面之间的第二距离,并将所述第一距离和所述第二距离传输至所述控制模块;
所述控制模块用于根据所述第一距离、所述第二距离及预设条件向所述驱动模块发送控制指令;
所述驱动模块分别与所述控制模块和所述机械爪连接,用于接收所述控制模块发送的控制指令,并根据所述控制指令驱动所述机械爪动作。
可选的,所述无源机械爪抓取装置还包括输入模块;所述输入模块与所述控制模块连接,用于输入球体半径、爪体长度及静摩擦系数;
所述控制模块根据所述输入的球体半径、爪体长度及静摩擦系数计算得到不同的预设条件,其中每种预设条件对应一种类型的球体和爪体。
可选的,所述测距模块包括第一测距传感器和第二测距传感器;所述第一测距传感器设置在所述连接轴与所述爪体铰接的一端,用于获取所述连接轴与所述球体之间的第一距离;所述第二测距传感器设置在所述爪体的末端,用于获取所述爪体的末端与所述球体的支撑面之间的第二距离。
可选的,所述第一测距传感器和所述第二测距传感器为红外测距传感器或雷达测距传感器。
本发明实施例的第二方面提供了一种无源机械爪抓取方法,包括:
当机械爪位于球体正上方时,驱动所述机械爪的连接轴旋转并下降;
实时获取所述连接轴与所述球体之间的第一距离,当所述第一距离等于或小于第一预设距离时,驱动所述连接轴停止旋转,并停止下降;
当所述连接轴停止旋转,并停止下降后,实时获取所述机械爪的爪体的末端与球体的支撑面之间的第二距离,当所述第二距离在预设时间间隔内的变化量的绝对值小于预设阈值时,驱动所述连接轴上升,所述爪体在摩擦力作用下将所述球体抓取起来。
可选的,所述爪体在摩擦力作用下将所述球体抓取起来后,还包括:驱动所述机械爪将所述球体运送到指定位置;驱动所述连接轴旋转并带动所述爪体在离心力作用下张开,所述球体掉落在指定位置。
可选的,所述第一预设距离为:
其中,d1为第一预设距离,d2为第二预设距离,d3为第三预设距离。
可选的,所述第二预设距离d2为:
当L>2R时,d2=L-2R
当L<2R时,d2=0
其中,L为机械爪的连接轴到爪体的末端的直线长度,L>2Rcosβ,β为摩擦角,R为球体的半径。
可选的,所述第三预设距离为在所述爪体利用摩擦力可将球体抓取起来的条件下,所述连接轴与所述球体之间的最大距离;
所述第三预设距离为:
其中,μ为静摩擦系数,L为机械爪的连接轴到爪体的末端的直线长度,R为球体的半径。
可选的,所述实时获取所述连接轴与所述球体之间的第一距离和实时获取所述机械爪的爪体的末端与球体的支撑面之间的第二距离,包括:通过第一测距传感器实时获取所述第一距离;通过第二测距传感器实时获取所述第二距离。
本发明实施例与现有技术相比存在的有益效果是:无源机械爪抓取装置的测距模块获取机械爪的距离参数,控制模块根据所述距离参数向驱动模块发送控制指令,驱动模块根据所述控制指令驱动机械爪在自身重力及摩擦力作用下自锁,对球体进行抓取,该装置无需设置自锁装置,结构简单,无需动力源,避免了资源浪费。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
图1是本发明实施例提供的一种无源机械爪抓取装置的系统结构示意图;
图2是本发明实施例提供的一种无源机械爪抓取装置对球体进行抓取的抓取示意图;
图3是本发明实施例提供的一种无源机械爪抓取方法的实现流程示意图;
图4是本发明实施例提供的又一种无源机械爪抓取方法的实现流程示意图;
图5是本发明实施例提供的一种无源机械爪对球体抓取过程中球体的受力示意图。
具体实施方式
以下描述中,为了说明而不是为了限定,提出了诸如特定系统结构、技术之类的具体细节,以便透彻理解本发明实施例。然而,本领域的技术人员应当清楚,在没有这些具体细节的其它实施例中也可以实现本发明。在其它情况中,省略对众所周知的系统、装置、电路以及方法的详细说明,以免不必要的细节妨碍本发明的描述。
为了说明本发明所述的技术方案,下面通过具体实施例来进行说明。
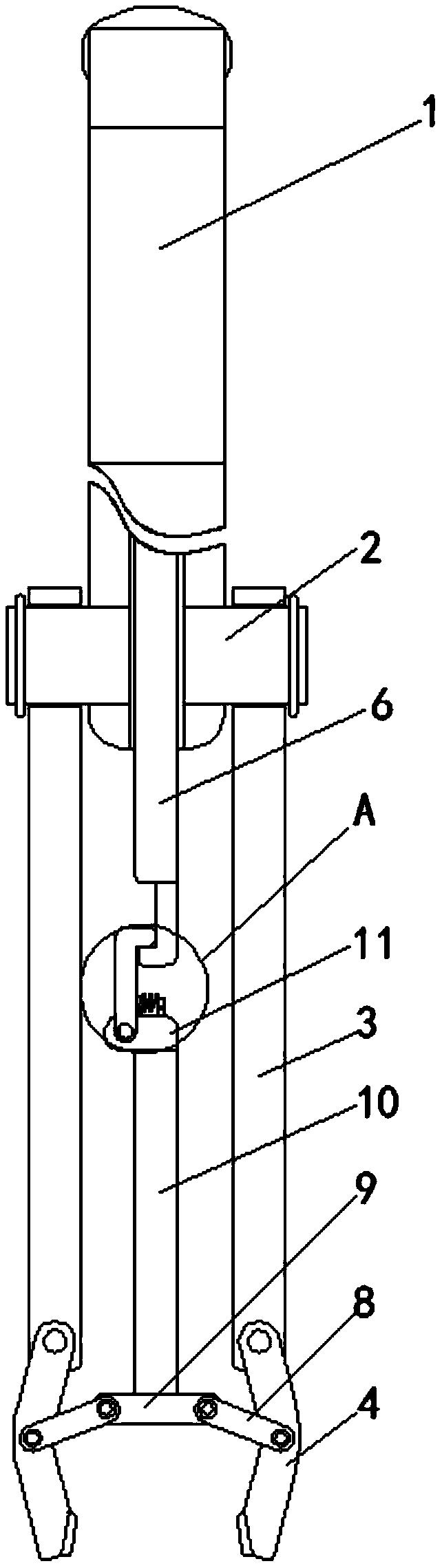
参考图1和图2,本发明一实施例提供了一种无源机械爪抓取装置,包括:控制模块11、驱动模块13、测距模块12和机械爪14。所述机械爪14与所述驱动模块13连接,用于在所述驱动模块13驱动下对球体16进行抓取;所述机械爪14包括连接轴141和爪体142,所述爪体142的顶端与所述连接轴141的一端铰接。所述测距模块12与所述控制模块11连接,用于获取所述连接轴141与所述球体16之间的第一距离D1和所述爪体142的末端与所述球体16的支撑面之间的第二距离D2,并将所述第一距离D1和所述第二距离D2传输至所述控制模块11。所述控制模块11用于根据所述第一距离D1、所述第二距离D2及预设条件向所述驱动模块13发送控制指令。所述驱动模块13分别与所述控制模块11和所述机械爪14连接,用于接收所述控制模块11发送的控制指令,并根据所述控制指令驱动所述机械爪14动作。
上述无源机械爪抓取装置,测距模块获取机械爪的距离参数,控制模块根据所述距离参数向驱动模块发送控制指令,驱动模块根据所述控制指令驱动机械爪在自身重力及摩擦力作用下自锁,对球体进行抓取,该装置无需设置自锁装置,结构简单,无需动力源,避免了资源浪费。
一些实施例中,所述机械爪14包含至少三个爪体142,且机械爪14对球体进行抓取时仅爪体142末端接触球体。
一些实施例中,所述无源机械爪抓取装置还包括输入模块15;所述输入模块15与所述控制模块11连接,用于输入球体16的半径R、爪体长度L及静摩擦系数μ。所述控制模块11根据所述输入的球体半径R、爪体142的长度L及静摩擦系数μ计算得到不同的预设条件,其中每种预设条件对应一种类型的球体16和爪体142,使得所述无源机械爪抓取装置具有较好的通用性,可根据实际需求应用于不同的场景。
一些实施例中,所述测距模块12包括第一测距传感器121和第二测距传感器122。所述第一测距传感器121设置在所述连接轴141与所述爪体142铰接的一端,用于获取所述连接轴141与所述球体16之间的第一距离D1。所述第二测距传感器122设置在所述爪体142的末端,用于获取所述爪体142的末端与所述球体16的支撑面之间的第二距离D2,例如所述第二测距传感器122可设置在所述机械爪14中的任一个爪体142的末端。
一些实施例中,所述第一测距传感器121和所述第二测距传感器122可为红外测距传感器或雷达测距传感器,也可为其他可以用来测距的传感器。红外测距传感器或雷达测距传感器,结构轻巧,安装在爪体142末端和连接轴141上不会影响装置正常工作。
参考图2和图3,本发明一实施例提供了一种无源机械爪抓取方法,所述一种无源机械爪抓取方法可应用于上述实施例提供的任一种无源机械爪抓取装置,包括如下步骤:
步骤S301,当机械爪14位于球体16正上方时,驱动所述机械爪14的连接轴141旋转并下降。
本步骤中,连接轴141旋转,带动爪体142在离心力作用下自然张开,为抓球做好准备。
一些实施例中,可在机械爪14上安装检测装置,用于检测球体16的位置。当检测到机械爪14位于球体16正上方时,控制模块11向驱动模块13发送控制指令,驱动模块13接收到所述控制指令后根据控制指令驱动机械爪14的连接轴141旋转并下降。连接轴141旋转的过程中带动爪体142在离心力作用下自然张开。
步骤S302,实时获取所述连接轴141与所述球体之间的第一距离D1,当所述第一距离D1等于或小于第一预设距离d1时,驱动所述连接轴141停止旋转,并停止下降。
实时获取所述连接轴141与所述球体之间的第一距离D1。一些实施例中,通过第一测距传感器121实时获取所述第一距离D1。一些实施例中,所述第一测距传感器121设置在所述连接轴141与所述爪体142铰接的一端。第一测距传感器121获取所述第一距离D1后,将其传输给控制模块11,控制模块11对所述第一距离D1进行分析处理,当所述第一距离D1等于或小于第一预设距离d1时,控制模块11向驱动模块13发送控制指令,驱动模块13接收到所述控制指令后驱动所述连接轴141停止旋转,并停止下降。
当所述第一距离D1等于或小于第一预设距离d1时,爪体142可在摩擦力作用下将球体16提起,同时连接轴141不会撞到球体16,使球体16不会因撞击被损坏。此时,离心力消失,爪体142在重力作用下闭合。一些实施例中,所述机械爪14包含多个爪体142,爪体数量大于或等于三个;多个爪体142将球体16包裹在内。
一些实施例中,所述第一预设距离为:
其中,d1为第一预设距离,d2为第二预设距离,d3为第三预设距离。
所述第一预设距离d1为第二预设距离d2和第三预设距离d3的平均值,当所述第一距离D1等于或小于第一预设距离d1时,机械爪14对球体16进行抓取。
一些实施例中,所述第二预设距离d2为:
当L>2R时,d2=L-2R
当L<2R时,d2=0
其中,L为机械爪14的连接轴141到爪体142的末端的直线长度,L>2Rcosβ,β为摩擦角,R为球体16的半径。
当L>2R时d2=L-2R,第一距离D1达到第二预设距离d2,爪体142闭合后刚好与球体16的支撑面接触,第一距离D1若继续增大,爪体142将无法闭合。同时,爪体142接触支撑面会造成爪体142损坏,例如球体16的支撑面为木地板,则同时会造成球体16的支撑面的损伤。当L<2R时,d2=0,第一距离D1达到第二预设距离d2即0时连接轴141将与球体16接触,不能继续下降。
一些实施例中,参考图5,所述第三预设距离d3为在所述爪体142利用摩擦力可将球体16抓取起来的条件下,所述连接轴141与所述球体16之间的最大距离;
利用摩擦力的自锁原理,爪体14对球体16的力有静摩擦力Fμ和法向作用力FN,这两个力的合力为FRA称为支撑面的全约束反力,简称全反力,其作用线与接触面的公法线形成一个偏角θ。当达到临界平衡状态时,静摩擦力Fμ达到最大值Fμmax。根据摩擦角的定义可知,全反力FRA的作用线不能超出摩擦角β以外,即全反力FRA必须在摩擦角β之内,即:
θ≤β
μ=tanβ
β=arctanμ≥θ
其中,μ为静摩擦系数。
由余弦定理:
R
其中,L为机械爪14的连接轴141到爪体142的末端的直线长度,R为球体16的半径,D1为连接轴141与球体16之间的第一距离。
由于L和R均为常数,当θ达到最大值时,D1达到最大,取θ=β时D1的最大值为第三预设距离d3
所述第三预设距离d3为:
其中,β为摩擦角,μ为静摩擦系数,L为机械爪14的连接轴141到爪体142的末端的直线长度,R为球体16的半径。
由于D1最小为0,则由
R
得到
L
即
L>2Rcosβ
当第一距离D1小于或等于所述第三预设距离d3时,球体16在摩擦力作用下自锁,不会滑落。
步骤S303,当所述连接轴141停止旋转,并停止下降后,实时获取所述机械爪14的爪体142的末端与球体16的支撑面之间的第二距离D2,当所述第二距离D2在预设时间间隔内的变化量的绝对值小于预设阈值时,驱动所述连接轴141上升,所述爪体142在摩擦力作用下将所述球体16抓取起来。
当所述连接轴141停止旋转,并停止下降后,实时获取所述机械爪14的爪体142的末端与球体16的支撑面之间的第二距离D2。一些实施例中,通过第二测距传感器122实时获取所述第二距离D2。一些实施例中,所述第二测距传感器122设置在任一爪体142的末端。第二测距传感器122获取第二距离D2后,将其传输给控制模块11,控制模块11对所述第二距离D2进行分析处理,当所述第二距离D2在预设时间间隔内的变化量的绝对值小于预设阈值时,控制模块11向驱动模块13发送相应控制指令,驱动模块13根据相应的控制指令驱动所述连接轴141上升。例如,可以每隔预设时间间隔获取一次第二距离D2,并计算本次获取的第二距离D2与前一次获取的第二距离D2之间的差值,所述差值即为所述第二距离D2在预设时间间隔内的变化量。
当所述连接轴141停止旋转,并停止下降后,离心力消失,爪体142在重力作用下闭合。由于爪体142闭合需要一定的时间,爪体142在闭合过程中末端距离接触面的第二距离D2变小,当第二距离D2在预设时间间隔内的变化量的绝对值小于预设阈值时,说明爪体142位置固定,已经闭合,可以对球体16进行抓取。例如,所述预设时间间隔可以为0.01s,所述预设阈值可以为5mm。
通过以上方法,可利用摩擦力自锁、离心力等自然规律实现无源机械爪对球体进行抓取,无需动力源对爪体进行锁紧即可实现对球体的抓取,简化装置及流程,节约资源。
一些实施例中,参考图4,步骤S303之后还可以包括:
步骤S304,驱动所述机械爪14将所述球体16运送到指定位置。
当机械爪14将球体抓取起来后,控制模块11控制驱动模块13驱动所述机械爪14将所述球体16运送到指定位置。
步骤S305,驱动所述连接轴141旋转并带动所述爪体142在离心力作用下自然张开,所述球体16失去爪体142的力的作用,在重力作用下掉落在指定位置。
当球体16运送到指定位置后,控制模块11向驱动模块13发送控制指令,控制驱动模块13驱动所述连接轴141旋转并带动所述爪体142离心力作用下自然张开,球体16失去摩擦力作用在重力的作用下掉落在指定位置。
一些实施例中,所述第一测距传感器121和所述第二测距传感器122可为红外测距传感器或雷达测距传感器等其他可以用来测距的传感器。红外测距传感器结构轻巧,安装在爪体142和连接轴141上不会影响装置的工作。
通过上述一种无源机械爪抓取方法,当球体位于机械爪正下方时,连接轴带动爪体旋转并下降,爪体在旋转过程中受离心力作用张开,当检测到连接轴到球体的第一距离达到预设距离时,停止旋转,并停止下降,爪体在重力作用下自然闭合,包裹住球体。当检测到爪体末端到球体的支撑面的距离不再变化时,说明爪体位置已经固定,可以对球体进行抓取,此时连接轴上升,球体在摩擦力作用下被抓取起来。该无源机械爪抓取方法步骤简单,易用性好,无需动力源驱动锁紧装置,环保实用。
以上所述实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围,均应包含在本发明的保护范围之内。
无源机械爪抓取装置及方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。


















动态评分
0.0